Изобретение относится к межсамолетной навигации и может быть использовано для осуществления автоматического контактирования на этапе дозаправки в воздухе путем определения пеленгов нескольких разнесенных источников излучения.
Известен способ определения ориентации подвижного объекта по координатам реперных источников (РИ), включающий определение сигналов, соответствующих положению изображения РИ в плоскости фотодетектора, определение углов пеленгов каждого РИ по полученным сигналам с учетом фокусного расстояния объектива и определение координат РИ по данным углов-пеленгов с учетом расстояния между точками [1].
Этот способ реализован в устройстве, содержащем реперные источники на подвижном объекте, а на неподвижном - два фотоприемных оптико-локационных блока (ОЛБ) и блок определения координат РИ и ориентации подвижного объекта [2].
Недостатком описанного аналога является применение прецизионного механического сканирования, наличие реперных источников с известным расположением на подвижном объекте.
Известны наиболее близкие к заявляемому изобретению способ и устройство локации источника излучения, описанные в патенте РФ №2275652, кл. G01S 5/16, опубл. 27.04.2006 г., и относящиеся к системам дистанционного определения ориентации подвижных объектов. Способ локации источников излучения основан на определении углов-пеленгов и координат реперных источников с помощью двух оптико-локационных блоков, каждый из которых содержит сканирующее зеркало, объектив и фотоприемник и по полученным значениям расстояния между точками отсчета углов-пеленгов ОЛБ определяют ориентацию источников излучения. Повышение точности измерения координат источников излучения достигается за счет учета изменения расстояния между оптико-локационными блоками.
Устройство локации источников излучения, реализующее этот способ, оснащено двумя оптико-локационными блоками, соединенными с блоком определения углов-пеленгов источников излучения, соединенным с блоком определения координат источников излучения, и блоком определения смещения точек отсчета углов-пеленгов, которые представляют собой вычислительные устройства, блок ввода и хранения данных расстояния между оптико-локационными блоками и сумматор.
Недостатком этих способа и устройства является недостаточная информативность и ограниченная точность отсчета координат, что не позволяет реализовать качественное управление заправляемым самолетом на этапе заправки в воздухе в автоматическом режиме.
Технической задачей изобретения является дистанционное измерение параметров пространственного и углового положения самолета-заправщика и конуса относительно заправляемого самолета для обеспечения автоматического управления заправляемым самолетом при осуществлении контактирования на этапе дозаправки самолета в воздухе.
Технический результат изобретения достигается тем, что в способе определения координат самолета-заправщика и конуса, включающем определение углов-пеленгов источников излучения, осуществляют программную обработку изображений, а именно определяют углы-пеленги шести их идентичных точек: двух, выбранных на законцовках крыльев самолета-заправщика, одной - на киле самолета-заправщика и трех - равноудаленных друг от друга точек на окружности основания конуса, на первой и второй фоточувствительных матрицах, вычисляют координаты идентичных точек относительно заправляемого самолета:

где:
- Yi1, Zi1, Yi2, Zi2 - координаты изображений точек С при (i=1), D при (i=2), E при (i=3), G при (i=4), H при (i=5), I при (i=6) на первой и второй фоточувствительных матрицах соответственно;
- Pix, Piy, Piz - координаты точек С при (i=1), D при (i=2), E при (i=3), G при (i=4), H при (i=5), I при (i=6) в системе координат OXYZ;
- F - фокусное расстояние объектива, м;
- B - расстояние между первой и второй фоточувствительными матрицами, м,
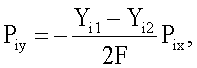
вычисляют углы ориентации самолета-заправщика и конуса относительно заправляемого самолета
 где a
j, b
j, c
j - углы разворотов при j=l системы O'X'Y'Z' относительно OXYZ в последовательности OX, OY, OZ соответственно, то есть углы ориентации самолета-заправщика относительно заправляемого самолета, а при j=2 системы O''X''Y''Z'' относительно OXYZ в последовательности OX, OY, OZ соответственно, то есть углы ориентации конуса относительно заправляемого самолета
где a
j, b
j, c
j - углы разворотов при j=l системы O'X'Y'Z' относительно OXYZ в последовательности OX, OY, OZ соответственно, то есть углы ориентации самолета-заправщика относительно заправляемого самолета, а при j=2 системы O''X''Y''Z'' относительно OXYZ в последовательности OX, OY, OZ соответственно, то есть углы ориентации конуса относительно заправляемого самолета
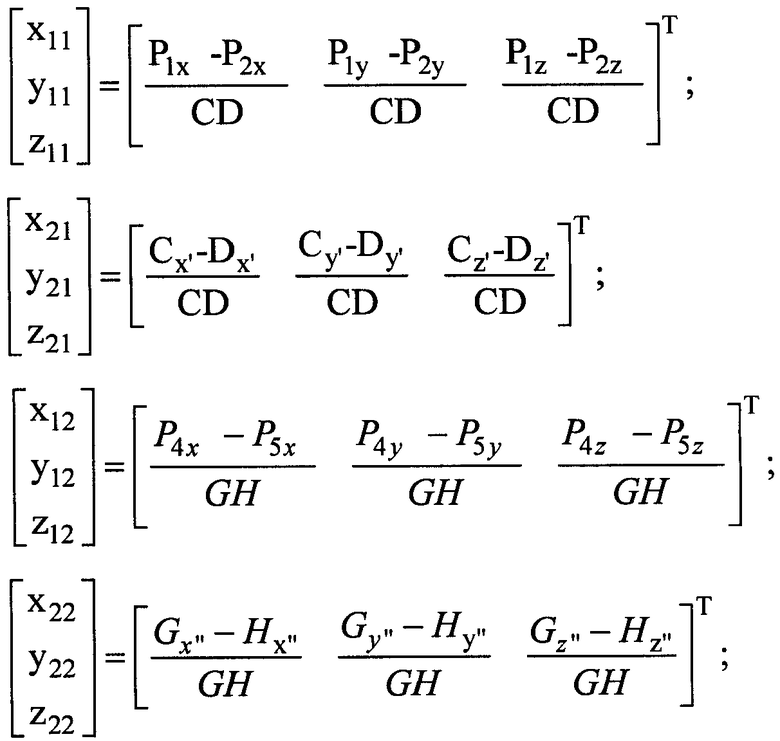
Cx', Cy', Cz - координаты точки С в системе координат O'X'Y'Z';
Dx', Dy', Dz' - координаты точки D в системе координат O'X'Y'Z';
Gx'', Gy'', Gz'' - координаты точки G в системе координат O''X''Y''Z'';
Нx'', Hy'', Hz'' - координаты точки Н в системе координат O''X''Y''Z'';


P1x, P1y, P1z - координаты точки С в системе координат OXYZ;
Р2х, Р2y, Р2z - координаты точки D в системе координат OXYZ;
P4x, P4y, P4z - координаты точки G в системе координат OXYZ;
P5x, P5y, P5z - координаты точки Н в системе координат OXYZ, вычисляют координаты положения самолета-заправщика и конуса относительно заправляемого самолета.
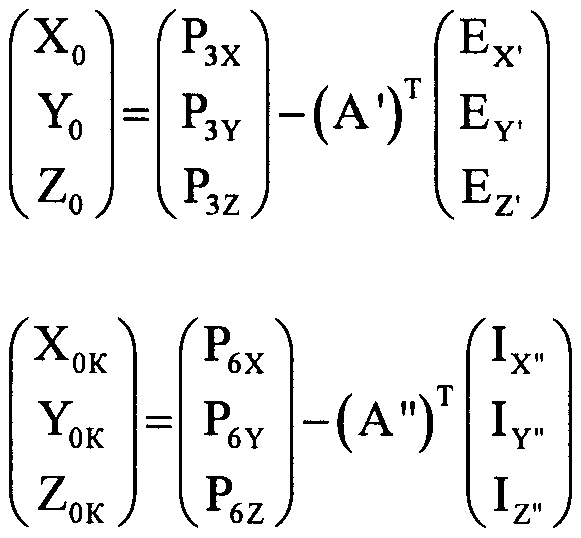
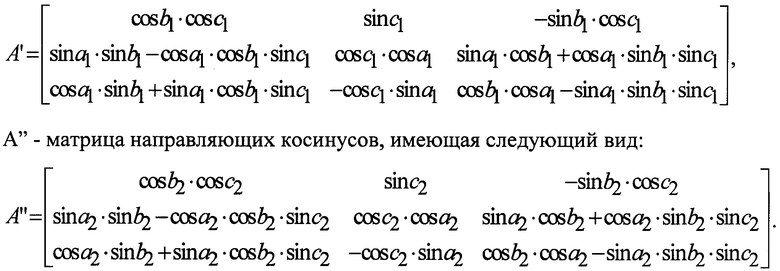
где X0, Y0, Z0 - координаты самолета-заправщика относительно заправляемого самолета, а X0K, Y0K, Z0K - координаты конуса относительно заправляемого самолета, А' - матрица направляющих косинусов, имеющая следующий вид:
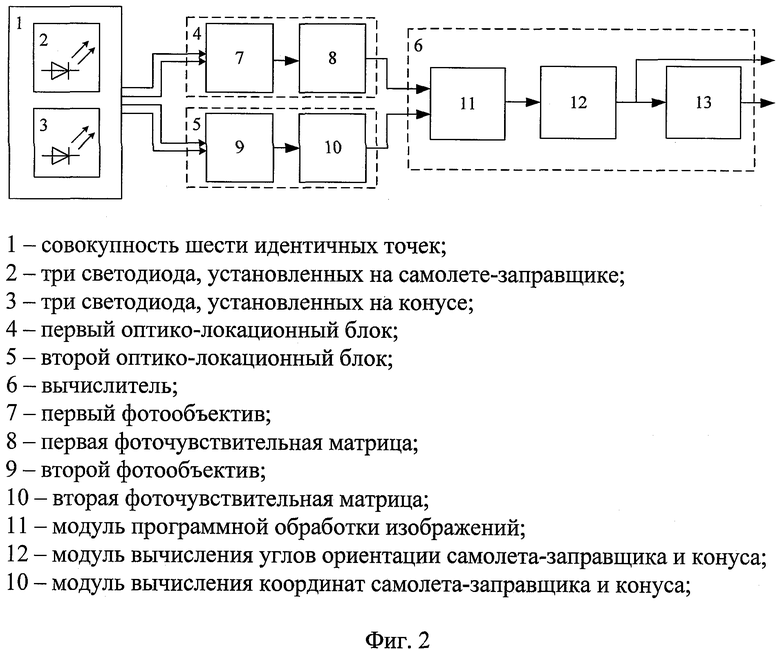
Заявляемый способ осуществляется при помощи устройства для определения координат самолета-заправщика и конуса, включающего два разнесенных оптико-локационных блока, содержащих фотообъектив и фоточувствительное устройство, расположенное в фокальной плоскости, и вычислитель, в котором фоточувствительное устройство представляет собой фоточувствительную матрицу, а вычислитель содержит модуль программной обработки изображений, модули вычисления углов ориентации самолета-заправщика и конуса, модули вычисления координат местоположения самолета-заправщика и конуса, при этом модуль программной обработки изображений, где определяют углы-пеленги идентичных точек, своим входом связан с выходами первой и второй фоточувствительных матриц, а своим выходом связан с входами модулей вычисления углов ориентации самолета-заправщика и конуса, где вычисляют корни системы нелинейных уравнений, выходы этих модулей, в свою очередь, связаны с входами модулей вычисления координат местоположения самолета-заправщика и конуса соответственно, где вычисляют координаты местоположения самолета-заправщика и конуса относительно заправляемого самолета.
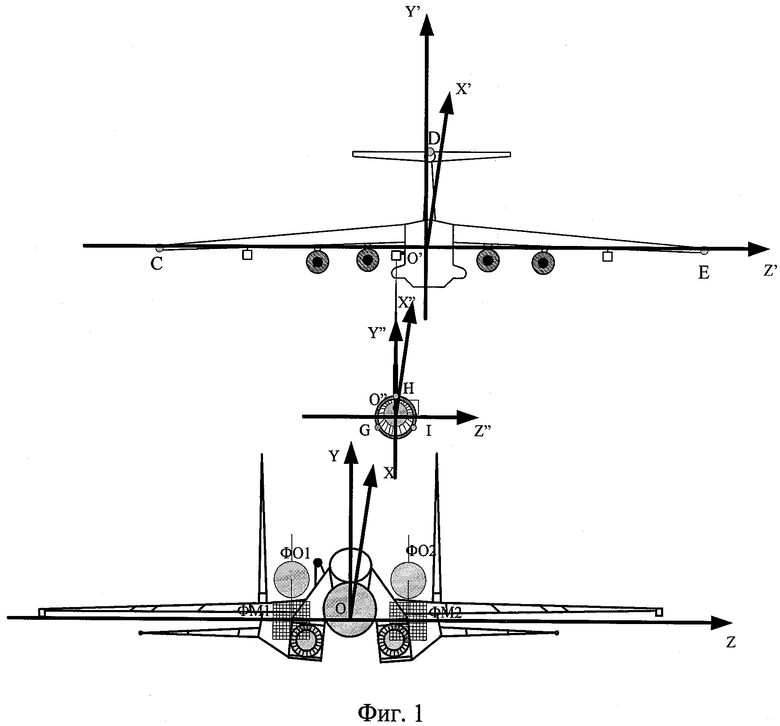
На фиг.1 показано расположение трех идентичных точек на конусе и трех идентичных точек на самолете-заправщике. Система координат O'X'Y'Z', связанная с самолетом-заправщиком, система координат O''X''Y''Z'', связанная с конусом, а также система координат OXYZ, связанная с заправляемым самолетом, и разнесенные оптико-локационные блоки с их элементами, фотообъективом и фоточувствительной матрицей. Они установлены на заправляемом самолете. На фиг.2 - структурная схема устройства, реализующего предлагаемый способ. На фиг.3 - система вспомогательных векторов для решения задачи о нахождении матрицы поворота вектора.
Способ определения координат самолета-заправщика и конуса реализуется следующим образом. Прямоугольная система координат OXYZ, связанная с заправляемым самолетом (фиг.1), ось ОХ - параллельна продольной оси самолета, ось OY - параллельна вертикальной оси, OZ - параллельна поперечной оси. Фоточувствительные матрицы, размещенные в фокальной плоскости своих объективов, находятся в плоскости координат OYZ, причем их центры лежат на оси OZ симметрично относительно начала координат О. Оптические оси обоих объективов параллельны оси ОХ и проходят через центры своих фоточувствительных матриц. Система координат O'X'Y'Z' связана с самолетом-заправщиком, где ось O'X' направлена по продольной оси самолета-заправщика, ось O'Y' направлена вверх по вертикальной оси самолета-заправщика, а ось O'Z' - поперечная ось самолета-заправщика. В этой системе координат рассматриваются три точки С, D, Е, связанные с окончаниями элементов конструкции планера заправляемого самолета, причем важно, чтобы эти точки не перекрывались другими элементами конструкции при выполнении этапа дозаправки. Система координат O''X''Y''Z'', связанная с конусом, где ось O''X'' направлена по продольной оси конуса, ось O''Y'' направлена вверх по вертикальной оси конуса, а ось O''Z'' - поперечная ось конуса. В этой системе координат рассматриваются три точки G, H, I, связанные с окружностью основания конуса, расположенные равноудаленно друг от друга.
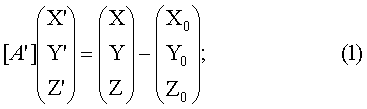
Для перехода от системы координат OXYZ к O'X'Y'Z' используется соотношение:
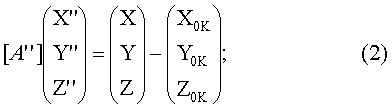
для перехода от системы координат OXYZ к O''X''Y''Z'' используется соотношение
где X0, Y0, Z0 - координаты точки О' в системе координат OXYZ;
X0K, Y0K, Z0K - координаты точки О'' в системе координат OXYZ;
X, Y, Z - координаты произвольного вектора (точки) в системе координат OXYZ;
X', Y', Z' - координаты этого же произвольного вектора (точки) в системе координат O'X'Y'Z';
X'', Y'', Z'' - координаты этого же произвольного вектора (точки) в системе координат O''X''Y''Z''
где a 2, b 2, c 2 - углы разворотов системы O''X''Y''Z'' относительно OXYZ в последовательности OX, OY, OZ соответственно.
Посредством двух фотоматриц, расположенных в фокальных плоскостях объективов, связанных с вычислителем, определяются координаты идентичных точек C, D, E, G, H, I, для этого используются следующие соотношения:

где:
- Yi1, Zi1, Yi2, Zi2 - координаты изображений точек С при (i=1), D при (i=2), E при (i=3), G при (i=4), H при (i=5), I при (i=6) на первой и второй фоточувствительных матрицах соответственно;
- Pix, Piy, Piz - координаты точек C при (i=1), D при (i=2), E при (i=3), G при (i=4), H при (i=5), I при (i=6) в системе координат OXYZ;
- F - фокусное расстояние объектива, м;
- В - расстояние между первой и второй фоточувствительными матрицами, м,
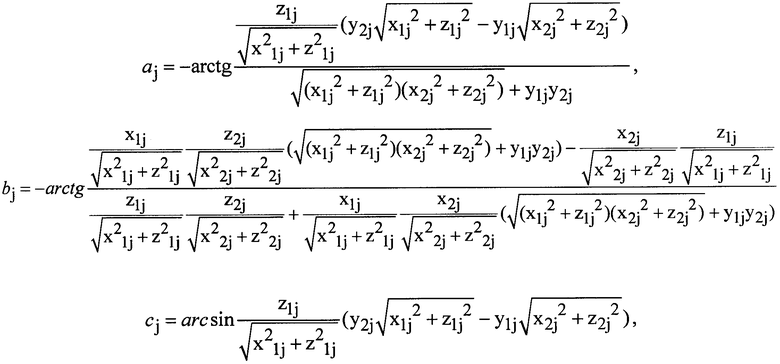
Запишем вектора OC, OD, OE, OG, OH, OI

или в матричном виде
 где CX', CY', CZ' - координаты точки С в системе координат O'X'Y'Z';
где CX', CY', CZ' - координаты точки С в системе координат O'X'Y'Z';
DX', DY', DZ' - координаты точки D в системе координат O'X'Y'Z';
ЕX', ЕY', EZ' - координаты точки Е в системе координат O'X'Y'Z';
GX'', GY'', GZ'' - координаты точки G в системе координат O''X''Y''Z'';
HX'', HY'', HZ'' - координаты точки H в системе координат O''X''Y''Z'';
IX'', IY'', IZ'' - координаты точки I в системе координат O''X''Y''Z''.
В выражениях (6) вычтем из первого равенства второе, получим
Матричное уравнение (8) представляет собой систему трех уравнений относительно трех неизвестных a 1, b 1, c 1.
В выражениях (7) вычтем из первого равенства второе, получим

Матричное уравнение (9) представляет собой систему трех уравнений относительно трех неизвестных a 2, b 2, c 2.
Решение этих уравнений может быть найдено одним из численных методов (например, методом простых итераций). Однако такой подход потребует значительных ресурсов ЭВМ при реализации этой задачи на борту ЛА в реальном масштабе времени, поэтому очень важно получить аналитическое решение систем уравнений (8) и (9), которое будет дано в процессе решения следующей задачи.
Задача о нахождении матрицы поворота вектора.
Пусть имеется два вектора единичной длины

Необходимо найти матрицу  размерности 3×3, такую что
размерности 3×3, такую что

где коэффициент j определяет, для какой системы уравнений решается задача о нахождении матрицы поворота вектора, при j=l задача решается для уравнения (8), при j=2 задача решается для уравнения (9),  - матрица направляющих косинусов (3) при j=l, (4) при j=2.
- матрица направляющих косинусов (3) при j=l, (4) при j=2.
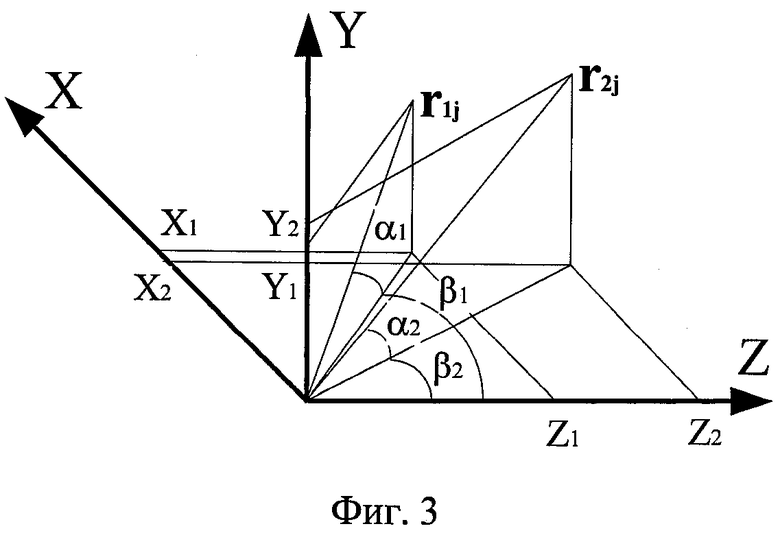
Изобразим векторы r1j и r2j и систему координат OXYZ на фиг.3.
Положение каждого вектора r1j и r2j определяется парой углов α1j, β1j и α2j, β2j. Координаты этих векторов выражаются следующим образом:
Умножим слева вектор r1 на матрицу поворота вокруг оси OY на угол β1j, получим
Из полученного выражения видно, что этот вектор лежит в плоскости OYZ и по-прежнему имеет длину, равную единице, то есть такое умножение эквивалентно повороту вектора на угол β1j. Умножим теперь полученный вектор на матрицу поворота вокруг оси OX на угол -α1j, получим

В результате двух последовательных поворотов исходного вектора r1j мы получили единичный вектор, совпадающий с осью OZ. Если теперь полученный вектор повернуть на угол α2j вокруг оси ОХ, а затем на угол - β2j вокруг оси OY, то получим вектор r2j.

Эти преобразования позволяют сделать вывод, что матрица поворота A, преобразующая произвольный вектор r1j в вектор r2j, представляет собой произведение четырех матриц

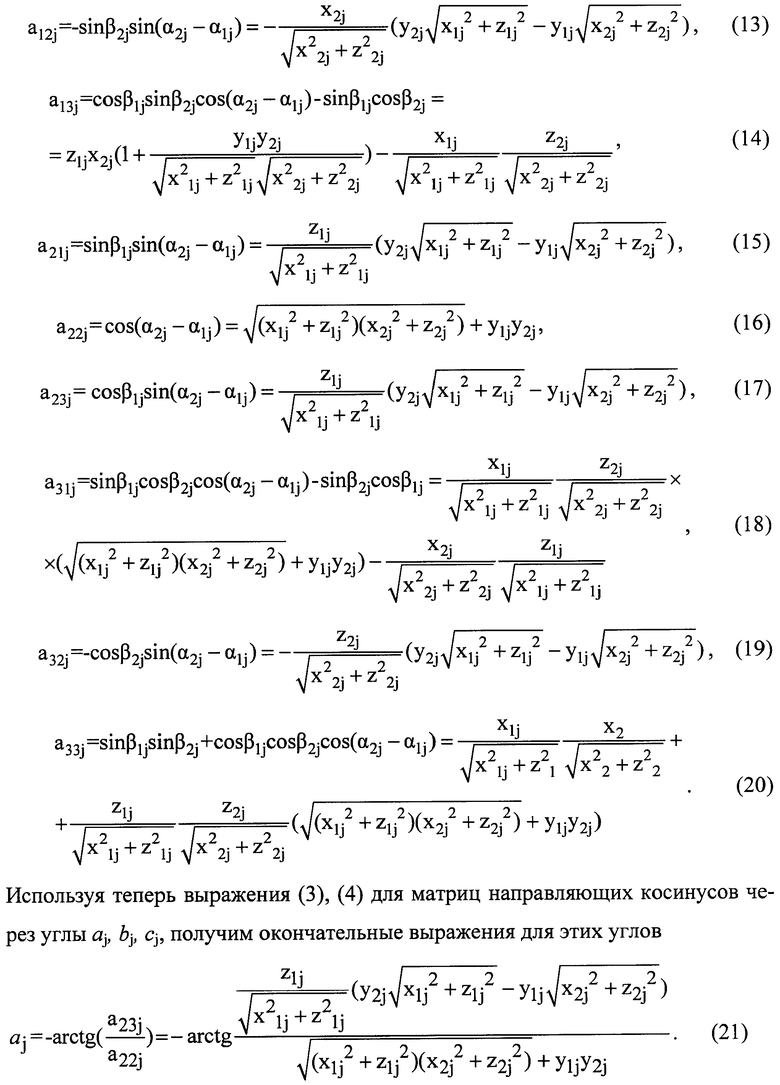
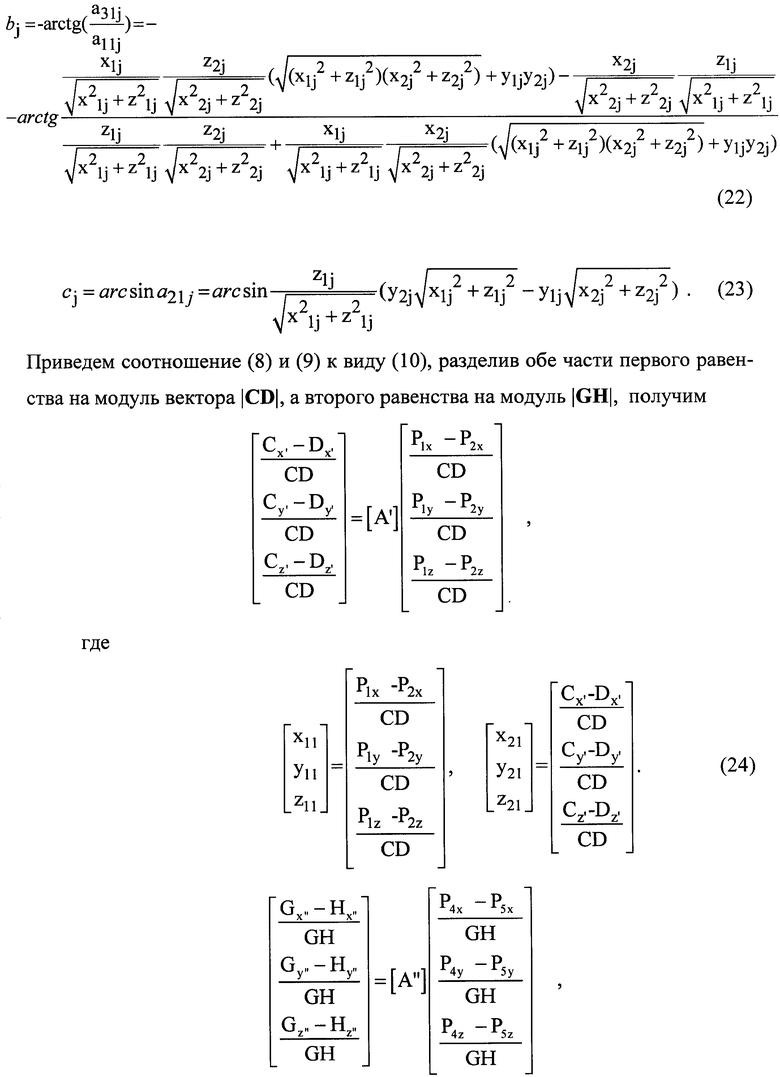
Выражения (21)…(23) с учетом обозначений (24) используют для практического вычисления углов a j, b j, c j, а выражения (21)…(23) с учетом обозначений (25) используют для практического вычисления углов a 2, b 2, c 2.
Тогда из уравнений (6) можно найти численные значения координат X0, Y0, Z0, которые совместно с величинами a 1, b 1, c 1 определяют положение самолета-заправщика относительно заправляемого самолета, а из уравнений (7) можно найти численные значения координат X0K, Y0K, Z0K, которые совместно с величинами a 2, b 2, c 2 определяют положение конуса относительно заправляемого самолета
Устройство определения координат местоположения самолета-заправщика и конуса содержит шесть светодиодов 1, которые являются идентичными точками при обработке изображений, три из них расположены на монолитной конструкции планера самолета-заправщика, а другие три расположены на окружности основания конуса, и используются для повышения точности определения идентичных точек, два оптико-локационных блока 4, 5, содержащих фотообъективы 7, 9 и фоточувствительные матрицы 8, 10, вычислитель 6, который состоит из модулей программной обработки изображений 11, вычисления углов ориентации самолета-заправщика и конуса относительно заправляемого самолета 12 и модулей вычисления координат самолета-заправщика и конуса относительно заправляемого самолета 13.
Устройство работает следующим образом.
Изображение, содержащее изображение самолета-заправщика и конуса, регистрируют оптико-локационными блоками 4 и 5 и с помощью фотообъективов 7 и 9 формируют на фоточувствительных матрицах 8 и 10 это изображение. Полученные изображения подают в модуль программной обработки изображений 11, где осуществляют поочередное сравнение величин R, G, B кодов пикселей фотоматрицы с их значениями, соответствующими изображению идентичных точек самолета-заправщика и конуса, затем определяют коды координат идентичных точек самолета-заправщика и конуса, которые используются в модуле вычисления углов ориентации самолета-заправщика и конуса 12. После чего угловые положения самолета-заправщика и конуса пересчитывают в координаты самолета-заправщика и конуса относительно заправляемого самолета в модуле вычисления координат самолета заправщика и конуса.
Указанное утверждение в отношении повышения точности определения перечисленных параметров достигается за счет использования прецизионных датчиков информации, автоматизации процессов съема и обработки информации.
Источники информации
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - c.168.
2. Патент на изобретение GB №2002986 A, опубл. 28.02.1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2521972C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
Изобретение относится к межсамолетной навигации и может быть использовано для автоматизации дозаправки самолета в воздухе. Достигаемый технический результат изобретения - автоматическое управление заправляемым самолетом в процессе контактирования на этапе дозаправки в воздухе. Способ заключается в том, что при помощи устройства, включающего два разнесенных оптико-локационных блока, состоящих каждый из фотообъектива и фоточувствительной матрицы в его фокальной плоскости, расположенных на заправляемом самолете, и вычислителя, включающего в себя модуль программной обработки изображения, модуль вычисления углов ориентации самолета-заправщика и конуса и модуль вычисления координат самолета-заправщика и конуса, обрабатывают изображения и по координатам идентичных точек на фоточувствительных матрицах вычисляют координаты местоположения и углы ориентации самолета-заправщика и конуса относительно заправляемого самолета. 2 н.п. ф-лы, 3 ил.
1. Способ определения координат самолета-заправщика и конуса, включающий определение углов-пеленгов источников излучения, отличающийся тем, что осуществляют программную обработку изображений, а именно на первой и второй светочувствительных матрицах определяют углы-пеленги шести идентичных точек С, D, Е, G, Н, I, представляющих собой светодиоды, - двух, выбранных на законцовках крыльев самолета-заправщика, одной - на киле самолета-заправщика и трех - равноудаленных друг от друга на окружности основания конуса, вычисляют координаты идентичных точек относительно заправляемого самолета:

где
Yi1, Zi1, Yi2, Zi2 - координаты изображений точек С при (i=1), D при (i=2), E при (i=3), G при (i=4), H при (i=5), I при (i=6) на первой и второй фоточувствительных матрицах соответственно;
Pix, Piy, Piz - координаты точек С при (i=1), D при (i=2), E при (i=3), G при (i=4), H при (i=5), I при (i=6) в системе координат OXYZ;
F - фокусное расстояние объектива, м;
В - расстояние между первой и второй фоточувствительными матрицами, м,
вычисляют углы ориентации самолета-заправщика и конуса относительно заправляемого самолета

где aj, bj, cj - углы разворотов при j=1 системы O'X'Y'Z' относительно OXYZ в последовательности OX, OY, OZ соответственно, то есть углы ориентации самолета-заправщика относительно заправляемого самолета, а при j=2 системы O"X"Y"Z" относительно OXYZ в последовательности ОХ, OY, OZ соответственно, то есть углы ориентации конуса относительно заправляемого самолета
Cx', Cy', Cz' - координаты точки С в системе координат O'X'Y'Z';
Dx', Dy', Dz' - координаты точки D в системе координат O'X'Y'Z';
Gx'', Gy'', Gz'' - координаты точки G в системе координат O''X''Y''Z'';
Нx'', Hy'', Hz'' - координаты точки Н в системе координат O''X''Y''Z'';
 ;
;

P1x, P1y, P1z - координаты точки C в системе координат OXYZ;
Р2х, Р2y, Р2z - координаты точки D в системе координат OXYZ;
P4x, P4y, P4z - координаты точки G в системе координат OXYZ;
P5x, P5y, P5z - координаты точки H в системе координат OXYZ; вычисляют координаты положения самолета-заправщика и конуса относительно заправляемого самолета
где Х0, Y0, Z0 - координаты самолета-заправщика относительно заправляемого самолета, а Х0K, Y0K, Z0K - координаты конуса относительно заправляемого самолета, А' - матрица направляющих косинусов, имеющая следующий вид:

A'' - матрица направляющих косинусов, имеющая следующий вид:

2. Устройство для определения координат самолета-заправщика и конуса, включающее два разнесенных оптико-локационных блока, содержащих фотообъектив и фоточувствительное устройство, расположенное в фокальной плоскости, и вычислитель, отличающееся тем, что фоточувствительное устройство представляет собой фоточувствительную матрицу, а вычислитель содержит модуль программной обработки изображений, модуль вычисления углов ориентации самолета-заправщика и конуса, модуль вычисления координат местоположения самолета-заправщика и конуса, при этом модуль программной обработки изображений, где определяют углы-пеленги шести идентичных точек, представляющих собой светодиоды, двух, выбранных на законцовках крыльев самолета-заправщика, одной - на киле самолета-заправщика и трех раноудаленных друг от друга на окружности основания конуса, своими входами связан с выходами первой и второй фоточувствительных матриц, а своим выходом связан с входом модуля вычисления углов ориентации самолета-заправщика и конуса, в котором углы-пеленги шести идентичных точек используют для вычисления углов ориентации самолета-заправщика и конуса, выход модуля вычисления углов ориентации самолета-заправщика и конуса связан с входом модуля вычисления координат местоположения самолета-заправщика и конуса, где угловые положения самолета-заправщика и конуса пересчитывают в координаты местоположения самолета-заправщика и конуса относительно заправляемого самолета.
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ И СКОРОСТЬЮ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2090458C1 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
| US 5326052 A, 05.07.1994 | |||
| US 5214285 A, 25.05.1993 | |||
| US 4200251 A, 29.04.1980 | |||
| WO 9501545 A1, 12.01.1995. | |||

