Изобретение относится к устройству неразрушающего контроля детали путем перемещения датчика по исследуемой детали. Изобретение касается, в частности, контроля вихревыми токами, используемыми для определения таких дефектов, как надрывы (небольшие трещины), которые имеются или могут появиться на поверхности детали или на небольшой глубине.
Изобретение используется, в частности, для контроля хвостовиков лопастей вентилятора авиационного двигателя.
В вентиляторе хвостовики лопастей являются объектом повышенных напряжений под действием центробежной силы в несколько тонн. Части, наиболее подверженные усталостным изменениям, являются зонами контакта между каждым хвостовиком лопасти и боковыми нервюрами выемки роторного колеса, в которой она установлена.
Известны способы неразрушающего контроля для этого типа дефектов, например способы контроля с помощью ультразвука и особенно способы контроля вихревыми токами.
В таком способе неразрушающего контроля зонд, в котором размещен датчик, определяющий явление, которое желают определить (например, обычная катушка, питаемая переменным током, для определения вихревых токов в случае металлической детали), должен перемещаться по поверхности контролируемой зоны. Прохождение датчика напротив трещины вызывает значительное возмущение получаемого сигнала, которое может быть визуализировано, например, с помощью осциллографа. Для хорошего систематического исследования контролируемой поверхности необходимо хорошо управлять траекторией зонда относительно детали. Принимается, что на каждой траектории корректно точно исследуется полоса в несколько миллиметров шириной. Следовательно, для исследования определенной зоны наиболее приемлемой процедурой является выполнение нескольких параллельных траекторий, разнесенных на заданное расстояние, меньшее упомянутой ширины, причем это расстояние выбирается таким, чтобы обеспечить достаточное перекрытие между полосами.
В качестве примера, для хвостовика лопасти классического вентилятора контролируемые поверхности, обычно прямоугольные, проходят по всей длине хвостовика лопасти примерно на ширину около одного сантиметра. Таким образом, можно определить несколько параллельных смещенных траекторий, например шесть параллельных траекторий, проходящих по всей длине хвостовика лопасти. Следствия разрыва лопасти настолько серьезны, что стараются систематизировать способы контроля хвостовиков лопастей в процессе операций технического обслуживания для определения появления мельчайшей трещины, способной явиться причиной начала разрушения.
До настоящего времени такой тип контроля требовал автоматизированной аппаратуры, способной точно определять траектории при гарантии хорошей перпендикулярности датчика относительно контролируемой поверхности в процессе фазы исследования контролируемой поверхности. Такие виды оборудования являются дорогостоящими и не могут быть установлены во всех обслуживающих подразделениях. Поэтому стремятся разработать простую эффективную ручную систему, позволяющую осуществлять этот тип контроля с хорошей надежностью даже в плохо оборудованных обслуживающих подразделениях.
Изобретение позволяет достичь этой цели.
В частности, изобретение касается устройства для неразрушающего контроля детали путем перемещения датчика по исследуемой детали, отличающегося тем, что оно содержит зонд, в котором размещен такой датчик, при котором зонд установлен с возможностью поворота на конце рукоятки, направляющую, имеющую базовую поверхность, и систему регулирования положения упомянутой направляющей в направлении, параллельном оси упомянутой рукоятки.
Таким образом, факт возможности контролируемого перемещения направляющей относительно зонда позволяет определить различные параллельные траектории, опираясь на общую направляющую поверхность самой детали.
Как упомянуто выше, датчик, предпочтительно, является датчиком вихревых токов для контроля металлической детали.
Более того, для специфического случая контроля хвостовика лопасти предпочтительно использовать постоянный профиль последней для облегчения направления зонда и определения различных траекторий.
Другими словами, направляющая и зонд выполнены соответственно для обеспечения контакта с внутренней радиальной поверхностью хвостовика лопасти и с соседней внешней радиальной поверхностью того же хвостовика лопасти.
В соответствии с предпочтительной характеристикой направляющая имеет общую форму муфты, коаксиальной упомянутой рукоятке, из которой выступает упомянутый зонд.
Для хорошего приспособления положения зонда и, в частности, для того, чтобы датчик всегда являлся, по существу, перпендикулярным исследуемой поверхности, устройство, предпочтительно, отличается тем, что упомянутый зонд установлен шарнирно в держателе для обеспечения возможности поворота относительно оси, перпендикулярной оси упомянутой руроятки, а также тем, что упомянутый держатель установлен в муфте на конце упомянутой рукоятки.
В соответствии с другой предпочтительной характеристикой изобретения рукоятка содержит участок с винтовой резьбой, на котором установлена гайка, соединенная с упомянутой рукояткой. Этот участок с винтовой резьбой может быть трубчатым. Предпочтительно, внутренняя стенка упомянутого трубчатого участка с винтовой резьбой снабжена трубкой, выступающей в муфту и образующей часть упомянутого держателя зонда.
В соответствии с другой предпочтительной характеристикой упомянутая трубка образует проход для электрических проводников, причем упомянутые проводники связаны с датчиком зонда.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
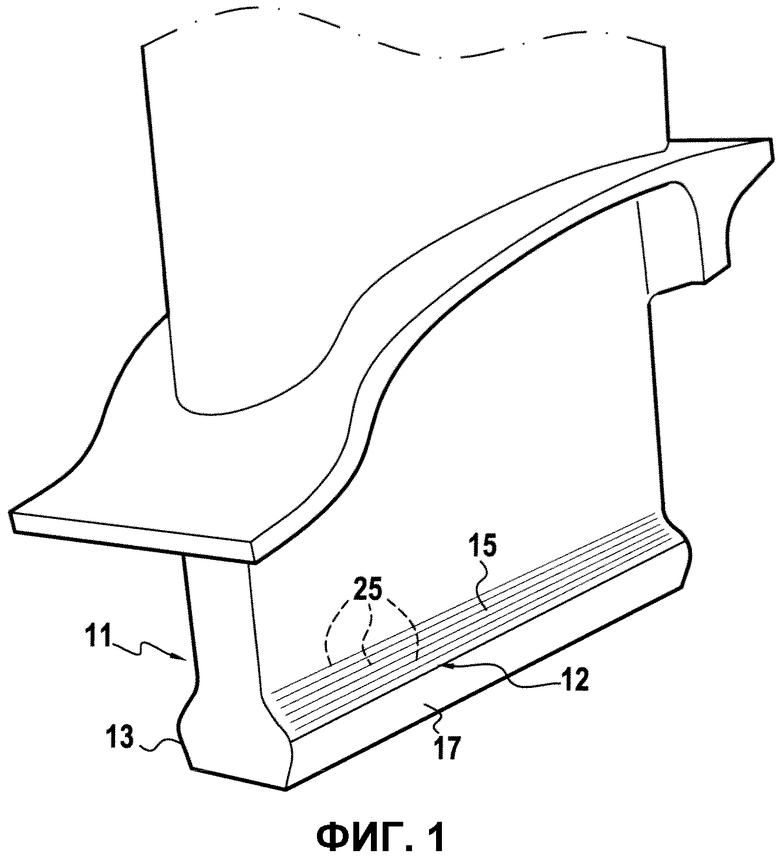
- фиг.1 изображает в перспективе хвостовик лопасти, предназначенный для контроля;
- фиг.2 изображает вид в перспективе устройства для контроля согласно изобретению;
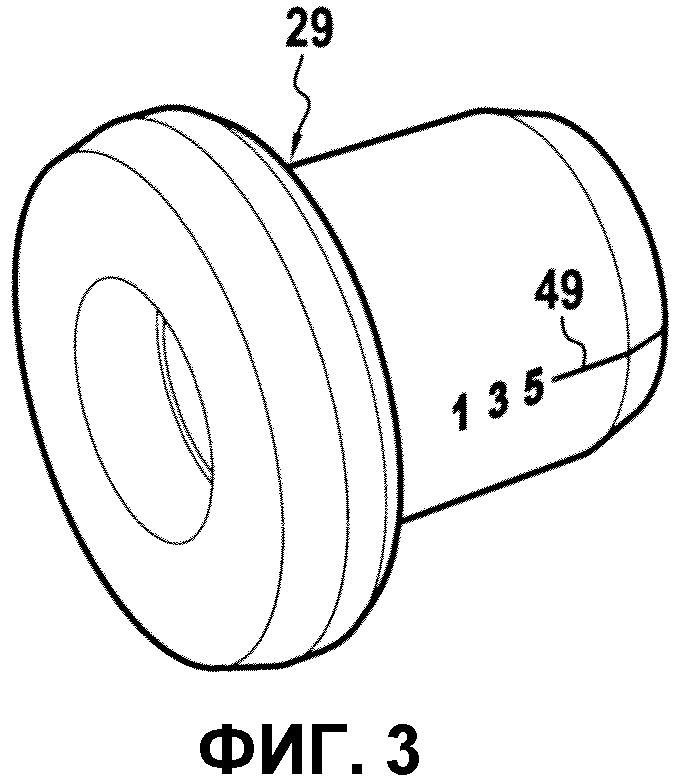
- фиг.3 изображает направляющую фиг.2 после поворота на пол-оборота;
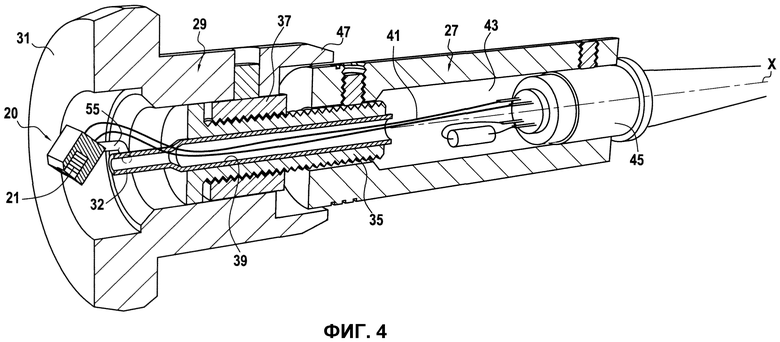
- фиг.4 изображает вид в продольном разрезе устройства фиг.2; и
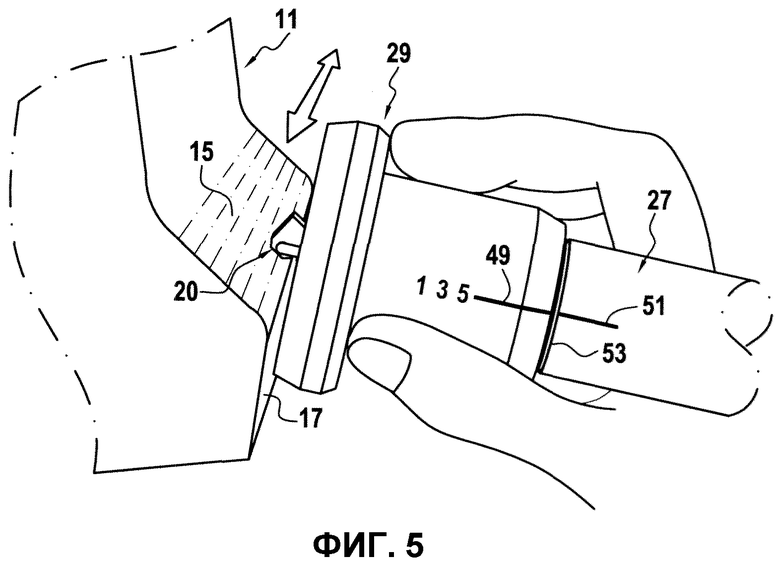
- фиг.5 изображает операции контроля.
На хвостовике 11 лопасти представленного типа видны две боковые прямоугольные нервюры 12, 13, предназначенные для удержания лопасти в выемке колеса вентилятора. Каждая нервюра имеет внешнюю наклонную радиальную поверхность 15 и внутреннюю наклонную радиальную поверхность 17. Поверхность 15 лучше видна, так как она под действием центробежной силы находится в контакте с соответствующими боковыми нервюрами (не изображенными) выемок роторного колеса. В соответствии с предпочтительной характеристикой соседняя поверхность 17 может служить направляющей поверхностью для ручного контроля с помощью зонда простой конструкции.
Контролируемая часть представляет собой в данном случае прямоугольник определенной постоянной ширины, проходящий по всей длине хвостовика лопасти.
В данном случае используют классический контроль с помощью вихревых токов. Вспомним, что зонд, содержащий катушку (датчик), питаемую переменным сигналом, перемещается, в данном случае вручную, по определенной траектории в зоне контроля. Сигнал возбуждает вихревые токи в металлической детали из стали или, например, титана. Сигнал, отслеживаемый в процессе относительного перемещения детали и зонда, визуализируется осциллографом в форме световых точек, положение которых является более или менее стабильным, если датчик перемещается по однородной поверхности. Если датчик проходит напротив неоднородности (видимая или внутренняя трещина), точка быстро смещается вследствие быстрого изменения вихревых токов в этой детали. Такое перемещение свидетельствует о наличии трещины.
Напомним, что в описанном примере каждая траектория 25 зонда позволяет контролировать узкую полосу и, что было определено, что упомянутая исследуемая зона может эффективно контролироваться путем определения шести параллельных траекторий, разнесенных на заданное расстояние, причем перекрытие исследуемых полос позволяет гарантировать определение любой трещины.
Для того чтобы контроль был эффективным и надежным, предложено устройство неразрушающего контроля, содержащее зонд 20, содержащий датчик 21 вихревых токов, шарнирно установленный на конце рукоятки 27. Кроме того, эта рукоятка связана с направляющей 29, снабженной базовой поверхностью 31. Точнее говоря, эта направляющая 29 имеет общую форму муфты, коаксиальной упомянутой рукоятке, из которой выступает упомянутый зонд. Конец этой муфты имеет кольцевую фронтальную поверхность, образующую упомянутую базовую поверхность 31. В соответствии с примером эта базовая поверхность расположена на конце расширенного фланца муфты.
Устройство, кроме того, содержит средства регулирования положения упомянутой направляющей в соответствии с направлением, параллельным оси X упомянутой трубки.
Как изображено, зонд 20 расположен на держателе 32. Точнее, он установлен с возможностью поворота на оси Y, перпендикулярной оси X упомянутой рукоятки. Держатель 32 установлен в муфте на конце рукоятки 27. Муфта, образующая направляющую 29, является подвижной относительно рукоятки 27 и, следовательно, относительно зонда 20. Для этого трубка содержит участок 35 с винтовой резьбой, на которой расположена гайка, соединенная с направляющей 29.
Участок 35 с винтовой резьбой является трубчатым для прохода электрических проводов. Предпочтительно, внутренняя стенка трубчатого участка с винтовой резьбой снабжена трубкой 39, выступающей в муфту и образующей участок держателя 32 зонда. Эта трубка образует проход для электрических проводов 41, связанных с датчиком 21 зонда 20. На другом конце трубка 39 открывается в осевую полость 43 рукоятки и электрические провода связаны с наконечниками соединителя 45, расположенного с заднего конца рукоятки 27. После обработки сигнал может быть выведен на экран не изображенного осциллографа.
Показано, что муфта, образующая направляющую 29, содержит заднюю юбку 47, которая перекрывает цилиндрическую часть рукоятки 27. Следовательно, навинчивание и отвинчивание муфты осуществляет регулирование положения зонда 20 относительно базовой поверхности 31, которое легко может быть измерено перемещением конца юбки 47, обращенного к рукоятке. Таким образом, для определения шести параллельных траекторий, обеспечивающих исследование всей контролируемой поверхности, определен шаг винта для перехода от одной траектории к другой при половине оборота муфты. Таким образом, муфта имеет две диаметрально противоположные риски 49, 50, при этом одна из рисок 49 соответствует нечетным траекториям 1, 3 и 5, тогда как другая 50 соответствует четным траекториям 2, 4 и 6. Кроме того, трубка содержит риску 51 и шесть параллельных кольцевых меток 53, соответствующих шести траекториям. Для перехода от одной траектории к другой достаточно повернуть муфту на пол-оборота и задний край последней переходит от одной кольцевой метки к следующей.
В передней суженной части трубки 39 расположен элемент поворота зонда, который содержит две противолежащие ветви 55, расположенные одна напротив другой, образующие своего рода вилку и имеющие шарнирную ось Y, вокруг которой поворачивается ось зонда. Последний содержит плоские наклонные грани, обеспечивающие хорошее позиционирование зонда на контролируемой поверхности. В этом положении ось катушки 21, образующей датчик, по существу, перпендикулярна контролируемой поверхности. Когда фронтальная поверхность, образующая упомянутую базовую поверхность 31, находится в контакте с поверхностью 17 хвостовика лопатки, зонд находится в контакте с поверхностью 15 хвостовика лопасти и в желаемой ориентации. Для каждой траектории контроль осуществляется предпочтительно в два приема, переходя от середины хвостовика лопасти к одному краю, потом к другому.
Изобретение относится к устройствам контроля вихревыми токами для определения дефектов на поверхности или на малой глубине детали, в частности лопасти вентилятора авиационного двигателя. Устройство содержит зонд (20), в котором размещен датчик (21), при этом зонд установлен с возможностью поворота на конце рукоятки (27), а направляющая (29) имеет базовую поверхность (31) и средства контролируемого регулирования положения направляющей параллельно оси трубки. При этом упомянутая направляющая (29) имеет форму муфты, коаксиальной упомянутой рукоятке (27), из которой выступает упомянутый зонд, при этом один из концов муфты имеет кольцевую поверхность, образующую упомянутую базовую поверхность (31). Технический результат - создание устройства, являющегося простым при манипулировании и легко адаптируемым для неразрушающего контроля деталей, имеющих сложную форму. Кольцевая базовая поверхность может быть приспособлена к любым поверхностям, и устройство имеет возможность поворота относительно его продольной оси. 7 з.п. ф-лы, 5 ил.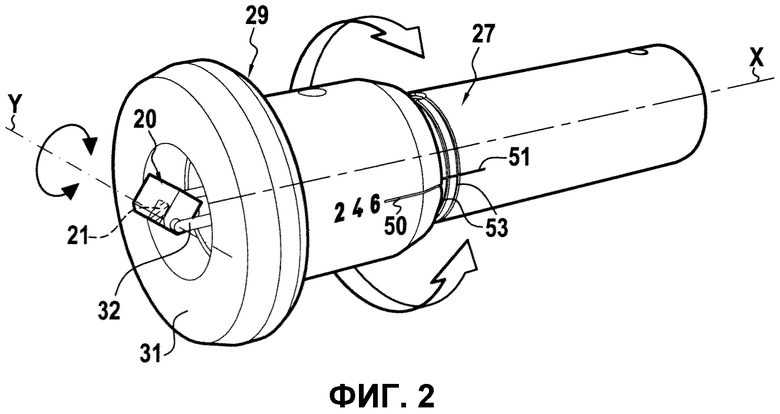
1. Устройство для неразрушающего контроля детали путем перемещения датчика (21) по сканируемой части, отличающееся тем, что оно содержит зонд (20), содержащий указанный датчик (21), причем зонд шарнирно установлен на конце рукоятки (27), а также направляющую (29) с базовой поверхностью (31) и средства контролируемого регулирования положения в направлении, параллельном оси (X) упомянутой рукоятки, причем
упомянутая направляющая (29) имеет форму муфты, коаксиальной упомянутой рукоятке (27), из которой выступает упомянутый зонд, при этом один из концов муфты имеет кольцевую поверхность, образующую упомянутую базовую поверхность (31).
2. Устройство по п. 1, отличающееся тем, что упомянутый зонд шарнирно установлен в держателе (32) для обеспечения возможности поворота относительно оси (Υ), перпендикулярной оси (X) упомянутой рукоятки, а также тем, что упомянутый держатель установлен в муфте на одном конце упомянутой рукоятки.
3. Устройство по п. 1, отличающееся тем, что упомянутая рукоятка (27) содержит участок (35) с винтовой резьбой, на котором расположена гайка (37), жестко соединенная с упомянутой муфтой.
4. Устройство по п. 3, отличающееся тем, что упомянутый участок (35) с винтовой резьбой является трубчатым.
5. Устройство по п. 4, отличающееся тем, что внутренняя стенка упомянутого трубчатого участка с винтовой резьбой снабжена трубкой (39), выступающей в муфту и образующей часть упомянутого держателя.
6. Устройство по п. 5, отличающееся тем, что упомянутая трубка (39) образует проход для электрических проводов (41), соединенных с датчиком (21) упомянутого зонда.
7. Устройство по любому из предыдущих пунктов, отличающееся тем, что упомянутый датчик является датчиком вихревых токов.
8. Устройство по любому из пп. 1-6, отличающееся тем, что направляющая (29) и зонд (20) выполнены соответственно для обеспечения контакта с внутренней радиальной поверхностью (17) хвостовика лопасти и с внешней соседней радиальной поверхностью (15) упомянутого хвостовика лопасти.
| US 0006952094 B1, 04.10.2005, | |||
| US 2004051525 A1, 18.03.2004, | |||
| ЛЮМИНОФОРНАЯ СУСПЕНЗИЯ ДЛЯ ГАЗОРАЗРЯДНЫХ ИСТОЧНИКОВ СВЕТА | 1993 |
|
RU2040069C1 |
| РАЗМЕЩАЕМЫЙ В РУКЕ УЗЕЛ НАКОНЕЧНИКА СТОМАТОЛОГИЧЕСКОГО ШПРИЦА С ПОДСВЕТОМ | 1998 |
|
RU2211682C2 |

