Изобретение относится к области радиолокации и может быть использовано при сопровождении траекторий объектов в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР).
Известен способ радиолокационного сопровождения траектории объекта, включающий обнаружение объекта в процессе регулярного обзора зоны ответственности РЛС, обнаружение и сопровождение траектории объекта, осуществляемые по данным об объекте, получаемым при осмотре стробов сопровождения (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. М.: Радио и связь, 1993, с.26).
Под стробом сопровождения траектории понимается область в пространстве, в которой с достаточно высокой вероятностью будет находиться объект, движущийся в направлении и со скоростью, экстраполированными на основе предыдущих данных об объекте, через время, равное периоду обращения к объекту (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.199).
В известном способе для осмотра строба сопровождения используются положения луча регулярного обзора. Специального переключения луча для осмотра стробов сопровождения в известном способе не производится.
В стробе сопровождения обычно обеспечивается потенциал значительно больший, чем при регулярном обзоре. В известном способе он достигается за счет пониженного относительно регулярного обзора порога обнаружения.
В известном способе при сбросе траектории объекта с сопровождения повторное обнаружение объекта осуществляется в процессе регулярного обзора, проводимого во всей зоне ответственности РЛС. После обнаружения объекта вновь производится обнаружение его траектории и ее сопровождение.
Недостатком известного способа сопровождения являются значительные затраты временных и энергетических ресурсов на регулярный обзор всей зоны ответственности РЛС. Поэтому количество траекторий, сопровождаемых с помощью данного способа, как правило, невелико.
В обзорных РЛС с ФАР для оптимизации временных и энергетических ресурсов зона ответственности разбивается на две части по углу места. В нижней ее части осуществляется регулярный обзор и сопровождение траекторий объектов (зона регулярного обзора), в верхней части - только сопровождение траекторий объектов в физических стробах (зона сопровождения), обнаруженных и взятых на сопровождение в зоне регулярного обзора. Такое разбиение зоны ответственности основано на том, что аэродинамические объекты (с высотой полета до 50 км) и баллистические объекты (стартующие в пределах инструментальной дальности зоны ответственности РЛС) впервые обнаруживаются при небольших углах места, поэтому регулярный обзор является обязательным только в нижней части зоны. В зоне сопровождения новые объекты указанных типов не появляются, поэтому здесь осуществляется только сопровождение (в физических стробах) траекторий объектов, обнаруженных и взятых на сопровождение в зоне регулярного обзора.
Под физическим стробом сопровождения понимается строб сопровождения, осматриваемый путем электронного переключения луча ФАР из его положений в зоне регулярного обзора. Высокий потенциал в стробе сопровождения достигается за счет понижения порога обнаружения и излучений зондирующего сигнала достаточно высокой мощности.
Наиболее близким к заявляемому является способ радиолокационного сопровождения траектории объекта, включающий обнаружение объекта в зоне регулярного обзора, обнаружение и сопровождение траектории объекта в зоне регулярного обзора, обнаружение и сопровождение траектории объекта в зоне сопровождения по координатам объекта, получаемым при обнаружении объекта в физических стробах сопровождения, формируемых в зоне сопровождения и осматриваемых через интервалы времени Тфсi, где i - номер интервала времени осмотра физического строба сопровождения (Голубев Г., Жибинов В., Кисляков В. "Цель будет обнаружена. Радиолокатор обнаружения 64Н6Е средств управления 83М6Е ЗРС С-300ПМУ1", журнал "Воздушно-космическая оборона", №4(11) 2003, с.15, средний столбец, 3-й абзац).
Наиболее близкий к заявляемому способ сопровождения траектории имеет следующий недостаток. Если сопровождаемый объект имеет малую ЭПР, интенсивно маневрирует или отраженный от объекта сигнал является флюктуирующим, то в некоторых стробах сопровождения он может быть не обнаружен (пропущен). При нескольких пропусках подряд, в случае выполнения критерия сброса траектории, траектория объекта будет сброшена с сопровождения. Так как объект расположен в зоне сопровождения, где регулярный обзор не проводится, то после сброса траектории с сопровождения объект уже не будет вновь обнаружен и взят на сопровождение, т.е. будет потерян.
Таким образом, недостатком наиболее близкого технического решения является низкая надежность сопровождения траекторий малоразмерных, маневрирующих и имеющих флюктуирующий отраженный сигнал объектов в зоне сопровождения.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является увеличение надежности сопровождения траекторий малоразмерных, маневрирующих и имеющих флюктуирующий отраженный сигнал объектов в зоне сопровождения обзорной РЛС.
Указанный технический результат достигается тем, что в способе радиолокационного сопровождения траектории объекта, включающем обнаружение объекта в зоне регулярного обзора, обнаружение и сопровождение траектории объекта в зоне регулярного обзора, обнаружение и сопровождение траектории объекта в зоне сопровождения по координатам объекта, получаемым при обнаружении объекта в физических стробах сопровождения, формируемых в зоне сопровождения и осматриваемых через интервалы времени Тфсi, где i - номер интервала времени осмотра физического строба сопровождения, согласно изобретению при отсутствии обнаружения объекта в физическом стробе сопровождения в зоне сопровождения последовательно формируют и осматривают через интервалы времени Тдсj≤Тфсi, где j - номер интервала времени осмотра дополнительного физического строба, до первого обнаружения объекта не более n дополнительных физических стробов с увеличивающимися размерами каждого (k-го) из них, где n определяется имеющимися временными ресурсами РЛС, причем координаты центров дополнительных физических стробов выбирают совпадающими с координатами центра физического строба сопровождения, в котором объект не был обнаружен.
Указанный технический результат достигается также тем, что размеры дополнительных физических стробов вычисляют в соответствии с формулами:
- по дальности:

где k - порядковый номер дополнительного физического строба;
VR - радиальная скорость объекта, оцененная при предыдущих обращениях к объекту в стробах сопровождения;
Тдсi - интервал времени обращения к объекту в дополнительном физическом стробе;
j - номер интервала времени осмотра дополнительного физического строба, j=1,...,n;
σR - среднеквадратическое отклонение измерения дальности до объекта;
ΔRD - радиальное смещение объекта за счет эффекта Доплера при VR;
- по угловым координатам:
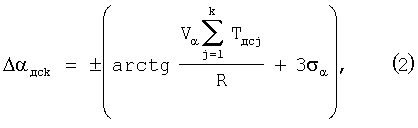
где σα - среднеквадратическое отклонение измерения угловой координаты объекта α;
Vα - скорость объекта по угловой координате α, оцененная при предыдущих обращениях к объекту в стробах сопровождения.
Суть заявляемого технического решения заключается в следующем. В обзорной РЛС с ФАР, в которой сопровождение объектов осуществляется во всей зоне ответственности, как уже отмечалось, для оптимизации временных и энергетических ресурсов зона ответственности разбивается на две части по углу места - зону регулярного обзора и зону сопровождения. При этом сопровождение траекторий в зоне сопровождения производится в физических стробах сопровождения, формируемых и осматриваемых путем быстрого переключения луча ФАР из положений регулярного обзора нижней части зоны ответственности. Такое разбиение зоны ответственности основано на том, что аэродинамические объекты (с высотой полета до 50 км) и баллистические объекты (стартующие в пределах инструментальной дальности зоны обзора РЛС) впервые обнаруживаются при небольших углах места, поэтому регулярный обзор является обязательным только в нижней части зоны. В зоне сопровождения новые объекты указанных типов не появляются. Поэтому в зоне сопровождения осуществляется только сопровождение траекторий объектов (в физических стробах), обнаруженных и взятых на сопровождение в зоне регулярного обзора. При этом размеры стробов сопровождения вычисляются по формулам:


где рi=Тфсi/Тфсi-1 - отношение интервала времени осмотра очередного физического строба сопровождения к интервалу времени осмотра предыдущего физического строба сопровождения.
Однако, если сопровождаемый в зоне сопровождения объект имеет малую ЭПР, интенсивно маневрирует или отраженный от объекта сигнал является флюктуирующим, то в некоторых физических стробах сопровождения он может быть не обнаружен. Если объект не обнаружен несколько раз подряд, то при выполнении критерия сброса траектория объекта будет сброшена с сопровождения. Поскольку регулярный обзор в зоне сопровождения не проводится, то объект и его траектория в этой части зоны уже не будут вновь обнаружены.
В заявляемом изобретении, если сопровождаемый в зоне сопровождения объект в физическом стробе не обнаружен, то осуществляют дополнительно n попыток обнаружения объекта. Для этого через интервалы времени Тдci, меньшие, чем интервалы времени Тфсi при сопровождении (Тдсj<Тфсi), последовательно формируют и осматривают до первого обнаружения объекта n дополнительных физических стробов с увеличивающимися размерами, рассчитываемыми по формулам (1) и (2).
Количество возможных попыток обнаружения объекта n определяется запасом временных ресурсов РЛС, который имеется в данный момент. Его величина зависит от таких факторов как количество одновременно сопровождаемых в физических стробах объектов, наличие и интенсивность помех, преодоление которых требует дополнительных временных ресурсов, и других факторов.
Координаты центров дополнительных физических стробов выбирают совпадающими с координатами центра строба сопровождения, в котором объект не был обнаружен.
Малые интервалы времени при обнаружении объекта в дополнительных физических стробах (Тдсj<Тфсi) позволяют как незначительно увеличивать размеры дополнительных физических стробов, так и обеспечивать достаточно малое необходимое количество попыток n обнаружения объекта в дополнительных физических стробах (два-три дополнительных физических строба). Таким образом, дополнительные временные и энергетические ресурсы РЛС, необходимые для обнаружения объекта в зоне сопровождения, оказываются сравнительно небольшими.
Интервал времени обращения к объекту при сопровождении Тфсi в современных обзорных РЛС равен 5÷15 с. Интервал времени Тдсj определяется возможностями ФАР и может быть обеспечен 1÷2 с.
Как только объект обнаружен в одном из дополнительных физических стробов, процесс формирования дополнительных физических стробов прекращается.
Если все n попыток обнаружить объект в дополнительных физических стробах оказались неудачными, то объект считается не обнаруженным в физическом стробе сопровождения.
После принятия решения об обнаружении объекта в физическом стробе сопровождения дальнейшее сопровождение его траектории производится известным способом.
Таким образом, значительно увеличивается надежность обнаружения малоразмерных, маневрирующих и имеющих флюктуирующий отраженный сигнал объектов в физических стробах. Этим значительно увеличивается надежность сопровождения указанных объектов в зоне сопровождения РЛС, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующим чертежом, на котором представлена блок-схема обзорной РЛС, реализующей заявляемый способ.
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с третьим входом вычислителя 6, выход вычислителя 6 соединен со входом устройства управления лучом 2 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М.: Радио и связь, 1986, стр.19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный способ обнаружения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.285-287).
Синхронизатор 7 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. М.: Сов. радио, 1970, с.602-603).
Рассмотрим работу обзорной РЛС, реализующей заявляемый способ.
По команде от синхронизатора 7 в устройстве управления лучом 2 рассчитывается распределение состояний фазовращателей в полотне антенны 1, и луч антенны 1 устанавливается в заданном направлении зоны регулярного обзора. Сформированный в передатчике 3 высокочастотный зондирующий сигнал через антенный переключатель 4 подается в антенну и излучается. Отраженный от объекта сигнал принимается антенной 1, через антенный переключатель 4 поступает в приемник 5, где преобразуется на видеочастоту, и затем подается в вычислитель 6, где осуществляются операции по обработке поступающей информации при обнаружении траектории, ее экстраполяции и фильтрации.
Обнаружение траектории объекта, экстраполяция траектории, фильтрация траектории и проверка критерия сброса траектории с сопровождения в вычислителе 6 осуществляется с использованием известных алгоритмов (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.284-287).
Если критерий сброса траектории с сопровождения выполнился в нижней части зоны ответственности, где регулярный обзор производится, то обнаружение объекта осуществляется в процессе регулярного обзора этой части зоны ответственности. По данным регулярного обзора в соответствии с наиболее близким способом вновь производится обнаружение траектории объекта, ее экстраполяция, фильтрация, проверка критерия сброса траектории с сопровождения.
В зоне сопровождения РЛС, где регулярный обзор не производится, если объект в физическом стробе сопровождения не был обнаружен (что происходит, как правило, если объект малоразмерный или маневрирующий), осуществляют дополнительные попытки обнаружения объекта в одном из n последовательно увеличивающихся дополнительных физических стробов с интервалом осмотра дополнительного строба Тдсj, меньшим, чем при сопровождении Тфсi. Величину n выбирают достаточной для надежного обнаружения объекта (n=2÷3). Координаты центров каждого из дополнительных физических стробов выбирают совпадающими с координатами центра физического строба сопровождения, в котором объект не был обнаружен, границы дополнительных физических стробов вычисляют в соответствии с формулами (1), (2).
Для осмотра дополнительного физического строба координаты луча ФАР подаются на вход устройства управления лучом 2 и луч антенны 1 устанавливается в требуемое положение строба. После того как объект обнаружен в одном из n дополнительных физических стробов или не обнаружен ни в одном из n дополнительных физических стробов, дальнейшее сопровождение траектории, т.е. ее экстраполяция, фильтрация и проверка критерия сброса с сопровождения, осуществляется известным способом.
Таким образом, в обзорной РЛС, реализующей заявляемый способ, достигается заявляемый технический результат - увеличение надежности сопровождения траекторий малоразмерных, маневрирующих и имеющих флюктуирующий отраженный сигнал объектов в зоне сопровождения обзорной РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
Изобретение относится к радиолокации и может быть использовано при сопровождении траектории объектов в обзорных радиолокационных станциях. Достигаемым техническим результатом является увеличение надежности сопровождения траекторий малоразмерных, маневрирующих и имеющих флюктуирующий отраженный сигнал объектов в зоне сопровождения обзорной РЛС. Технический результат достигается за счет того, что в способе радиолокационного сопровождения траектории объекта, включающем обнаружение объекта, обнаружение и сопровождение траектории объекта в зоне регулярного обзора, обнаружение и сопровождение траектории объекта в зоне сопровождения по координатам объекта, получаемым при обнаружении объекта в физических стробах сопровождения, формируемых в зоне сопровождения и осматриваемых через интервалы времени Тфci, где i - номер интервала времени осмотра физического строба сопровождения, при отсутствии обнаружения объекта в физическом стробе сопровождения в зоне сопровождения последовательно формируют и осматривают через интервалы времени Тдсj<Tфсi, где i - номер интервала времени осмотра дополнительного физического строба, до первого обнаружения объекта не более n дополнительных физических стробов с увеличивающимися размерами каждого из них, где n определяется имеющимися временными ресурсами РЛС, причем координаты центров дополнительных физических стробов выбирают совпадающими с координатами центра физического строба сопровождения, в котором объект не был обнаружен. 1 з.п. ф-лы, 1 ил.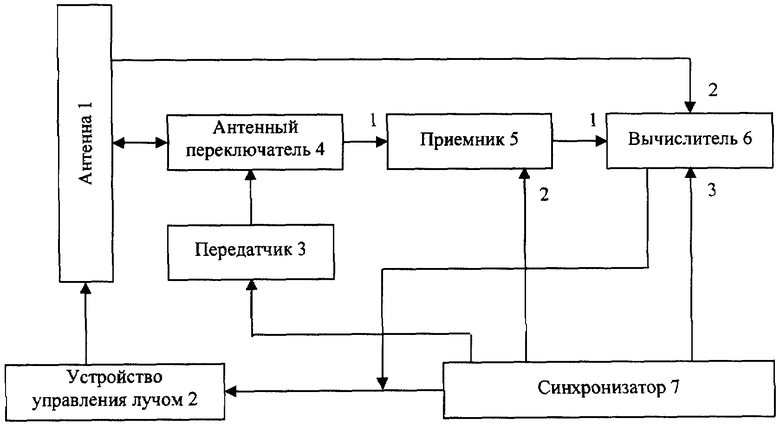
по дальности:

где k - порядковый номер дополнительного физического строба;
Vr - радиальная скорость объекта, оцененная при предыдущих обращениях к объекту в стробах сопровождения;
Тдсj - интервал времени обращения к объекту в дополнительном физическом стробе;
j - номер интервала времени осмотра дополнительного физического строба, j=1,..., n;
σR - среднеквадратическое отклонение измерения дальности до объекта;
ΔRD - радиальное смещение объекта за счет эффекта Доплера при VR;
- по угловым координатам:
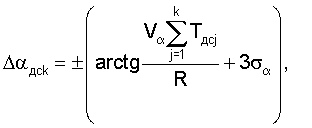
σα - среднеквадратическое отклонение измерения угловой координаты объекта α;
Vα - скорость объекта по угловой координате α, оцененная при предыдущих обращениях к объекту в стробах сопровождения.
| Воздушно-космическая оборона, 2003, №4(11), с.15 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ | 2003 |
|
RU2249232C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |
| US 4292635 A, 29.09.1981 | |||
| Сошник пневматической сеялки | 1973 |
|
SU490423A1 |

