ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области приборов обследования в целом, конкретнее к приборам обследования парогенераторов для электростанций и еще более конкретно к приборам обследования парогенераторов для атомных электростанций.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В атомной электростанции корпус атомного реактора вырабатывает тепло для производства пара и электричества. Корпус реактора обычно представляет собой герметичную емкость, в которой находятся блок с ядерным топливом и охлаждающая вода. Такие атомные электростанции обычно содержат три основных компонента: корпус реактора, содержащий топливо, который вырабатывает перегретую воду, которая потом поступает в один или более парогенераторов, которые производят пар для многоступенчатой паровой турбины для производства электроэнергии.
Перегретая вода доставляется в парогенератор через трубы. Эти трубы подают воду в многочисленные трубки внутри парогенератора. Эти трубки являются U-образными, они подают воду обратно в трубы на выпускном отверстии парогенератора, где она закачивается обратно в реактор. Трубки в атомном парогенераторе обычно образуют перевернутую U, между ними имеется узкий проход, они крепятся вместе с помощью множества опорных плит, разделенных регулярными вертикальными интервалами. Высота каждой группы трубок может превышать тридцать два фута. Используются от шести до восьми опорных плит, каждая из них разделена вертикально интервалами от трех до шести футов. В парогенераторе трубка с перегретой водой охлаждается холодной водой, которая вырабатывает пар, приводящий в движение турбину для производства электроэнергии.
Эта методика производства пара создает несколько проблем. Вода, используемая для охлаждения трубок, часто содержит примеси и химикаты, которые могут вызывать коррозию как трубок парогенератора, так и опорных плит и привести к другим повреждениям. Даже несмотря на то что согласно требованиям безопасности требуется периодическая проверка атомных парогенераторов, осуществление контроля чистоты парогенератора остается проблемой. Высококоррозийная среда парогенератора является особенно проблематичной для многих эксплуатируемых старых атомных реакторов во всем мире.
В прошлом трубки и опорные плиты парогенератора были недоступны для обследования. Информация собиралась с помощью сложных систем, которые не могли адекватно проверить все секции трубок и опорных плит. Из-за высокорадиоактивной среды и высокой температуры труб прямой визуальный осмотр персоналом обычно ограничивался промежутком три-пять минут на человека в период шести месяцев. Этот временной период не предоставляет достаточную возможность для тщательного осмотра на предмет коррозии, дыр и протечек. Поэтому осмотр узких проходов и зазоров между трубами на опорных плитах затруднен из-за высокой температуры, радиоактивности и узкого промежутка между трубами.
Трубки обычно проходят через четырехлепестковые отверстия в опорных плитах. Эти отверстия обеспечивают такие характеристики непрерывного потока, которые улучшают поток воды в генераторе и снижают образование осадков на опорных плитах. Тем не менее, на небольших участках, где четырехлепестковые отверстия контактируют с трубками, на трубках образуются наращения материала или даже прилипание материала, «осаждаемого» на трубках. Этот материал способствует преждевременной коррозии трубок. С помощью известных приборов для обследования это состояние остается незамеченным на всех трубках, кроме тех, что примыкают к проходу между трубками.
Далее, направление комплектующих частей внутри парогенераторов представляет исключительно сложную задачу для разработки рабочих приборов для осмотра таких участков. Отверстия для ввода (также называемые «лючки для обслуживания») на днище парогенераторов часто имеют небольшие размеры в пять-шесть дюймов в диаметре. Для целей данного описания такие порталы будут называться входными отверстиями. Перегородки для распределения потока в генераторе часто перегораживают пространство, не позволяя оборудованию маневрировать в генераторе. Осмотр парогенераторов при подъеме выше тридцати футов представляет серьезную инженерную задачу. Кроме того, щели для потока между группами трубок часто составляют менее двух дюймов в ширину, а проход между трубками имеет размер меньше одного дюйма (вплоть до 0,30 дюйма).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В некоторых аспектах данного изобретения система обследования внутренней части парогенератора включает в себя первую стрелу и вторую телескопическую стрелу, ближний конец которой соединен шарнирно с первой стрелой, а на дальнем конце имеется подающая капсула, подающая капсула образует отсек хранилища. Система обследования включает в себя первое роботизированное движущееся устройство обследования, соответствующее по размерам подающей капсуле и образующее отсек хранилища. Первое роботизированное движущееся устройство обследования включает в себя систему привода, по меньшей мере, одну камеру обследования и, по меньшей мере, одну систему подсветки. Первое роботизированное движущееся устройство обследования далее включает в себя систему кабелей, соединяющую роботизированное движущееся устройство обследования с подающей капсулой. Система обследования также включает в себя второе роботизированное движущееся устройство обследования, соответствующее по размерам отсеку хранилища первого роботизированного движущегося устройства обследования. Второе роботизированное движущееся устройство обследования включает в себя, по меньшей мере, одну камеру обследования и, по меньшей мере, одну систему подсветки и далее включает в себя систему кабелей, соединяющую второе роботизированное движущееся устройство обследования с первым роботизированным движущимся устройством обследования.
В другом аспекте данного изобретения движущаяся система обследования, предназначенная для обследования внутренней части парогенератора, включает в себя магнитное движущееся устройство обследования, состоящее из приводной системы, использующее магниты, электромагниты или комбинацию перечисленного для обеспечения вертикального движения магнитного движущегося устройства обследования по вертикальной поверхности, содержащей сплавы на основе железа, магнитное движущееся устройство обследования образует отсек хранилища и включает в себя, по меньшей мере, одну камеру обследования и, по меньшей мере, одну систему подсветки, магнитное движущееся устройство обследования далее включает в себя систему кабелей, соединяющую магнитное движущееся устройство обследования на дальнем конце с одной или более системой организации кабелей, видеоэкраном, источником питания и контроллером вне парогенератора. Движущаяся система обследования также включает в себя внутриузловое роботизированное движущееся устройство обследования, по размерам соответствующее отсеку хранилища магнитного движущегося устройства обследования; внутриузловое роботизированное движущееся устройство обследования включает в себя приводную систему, по меньшей мере, одну камеру обследования и, по меньшей мере, одну систему подсветки и далее включает в себя систему кабелей, соединяющую внутриузловое роботизированное движущееся устройство обследования с магнитным движущимся устройством обследования.
В еще одном аспекте данного изобретения движущаяся система обследования, предназначенная для обследования внутренней части парогенератора, включает в себя первое движущееся устройство обследования, состоящее из приводной системы с двумя гусеничными лентами, совокупности камер обследования и совокупности осветительных приборов, первое движущееся устройство обследования включает в себя раму, образующую внутренний отсек хранилища, магнитное движущееся устройство обследования далее включает в себя систему кабелей, соединяющую магнитное движущееся устройство обследования с отдаленным контроллером. Внутриузловое роботизированное движущееся устройство обследования также включает в себя приводную систему с одной гусеничной лентой, внутриузловое роботизированное движущееся устройство обследования имеет размеры, соответствующие внутреннему отсеку хранилища первого движущегося устройства обследования, внутриузловое движущееся устройство обследования включает в себя совокупность камер обследования и совокупность осветительных приборов и далее включает в себя систему кабелей, соединяющую внутриузловое роботизированное движущееся устройство обследования с первым движущимся устройством обследования.
Вышеприведенная сущность данного изобретения не предназначена для представления каждого варианта выполнения или каждого аспекта данного изобретения. Дополнительные свойства и преимущества данного изобретения выявляются в подробном описании, фигурах и формуле изобретения, приведенных ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Представление о других задачах и преимуществах изобретения можно получить при чтении следующего подробного описания в совокупности с чертежами.
Фиг.1 демонстрирует перспективу вертикальной системы развертывания (ВСР) для парогенераторов в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
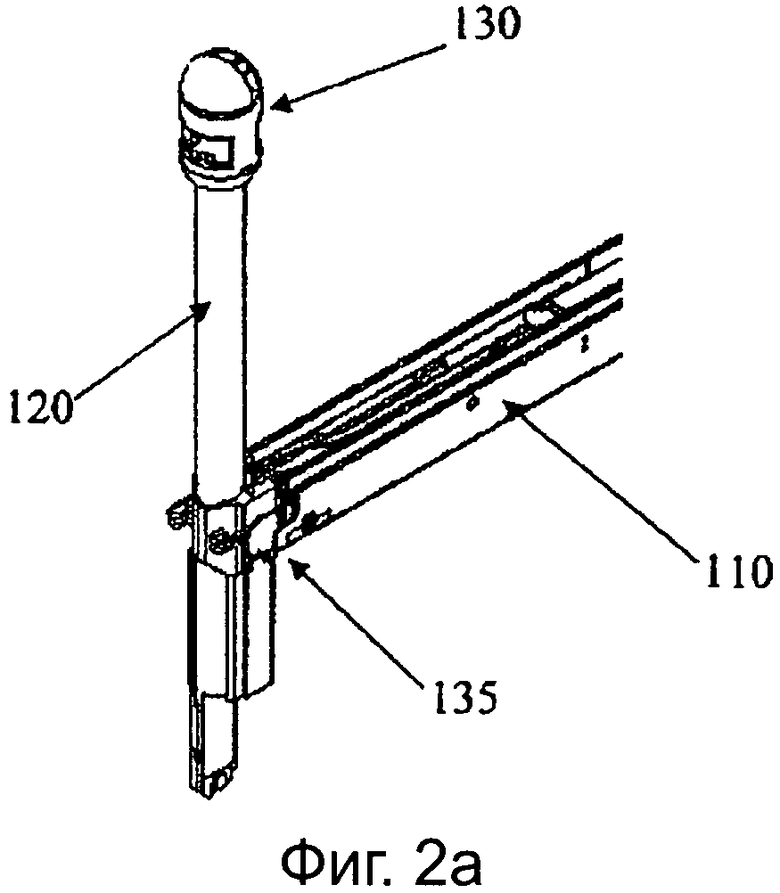
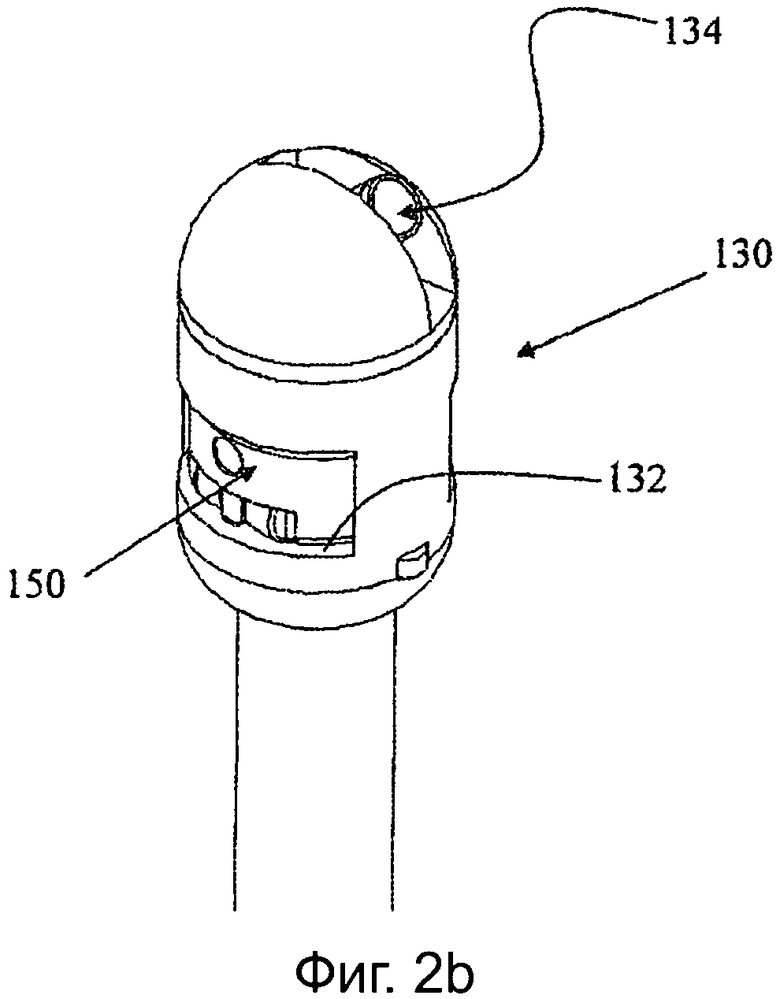
Фиг.2а-2b демонстрируют перспективу части ВСР Фиг.1, а именно подающую капсулу в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
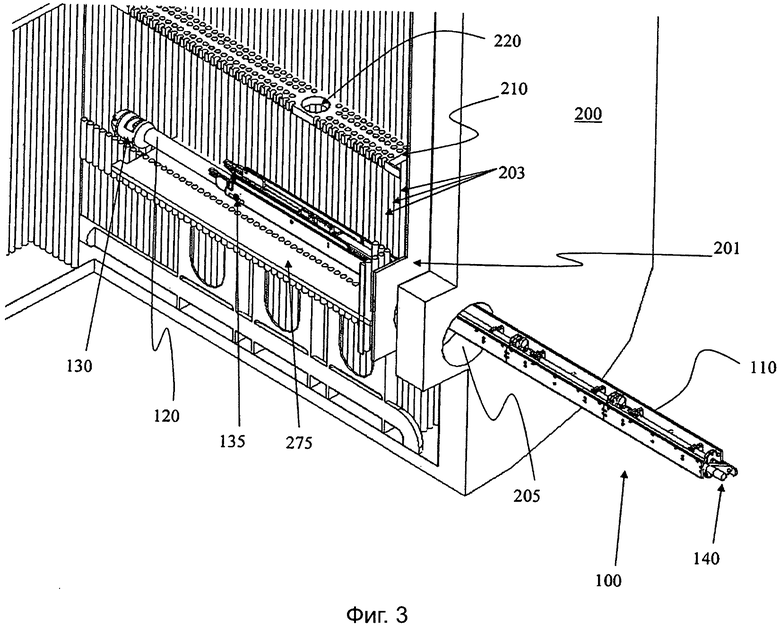
Фиг.3 демонстрирует ВСР предыдущих фигур, вставленную в парогенератор в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
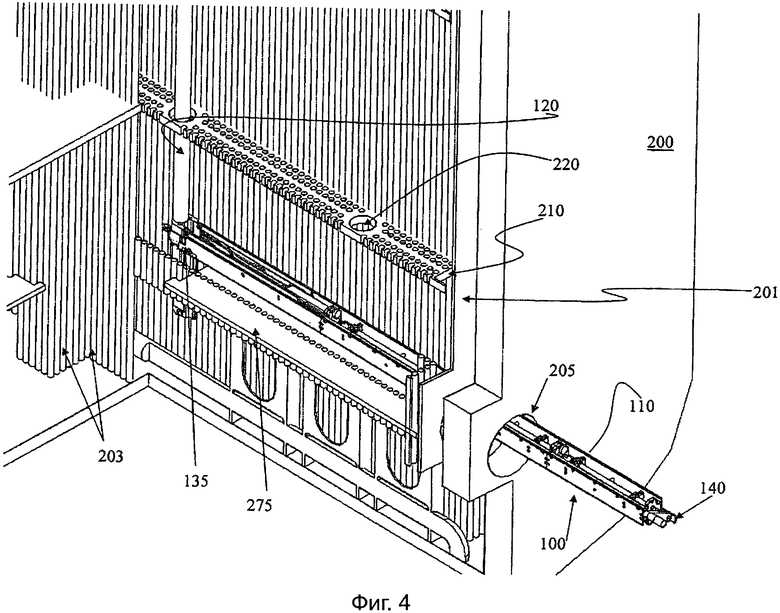
Фиг.4 демонстрирует ВСР предыдущих фигур в установленном и вставленном положении в парогенераторе в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
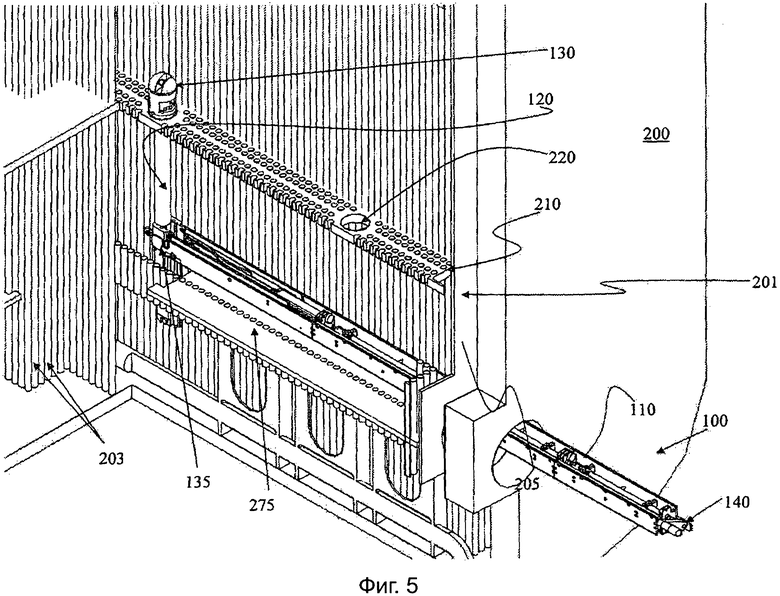
Фиг.5 демонстрирует ВСР предыдущих фигур в установленном и выдвинутом положении в парогенераторе в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
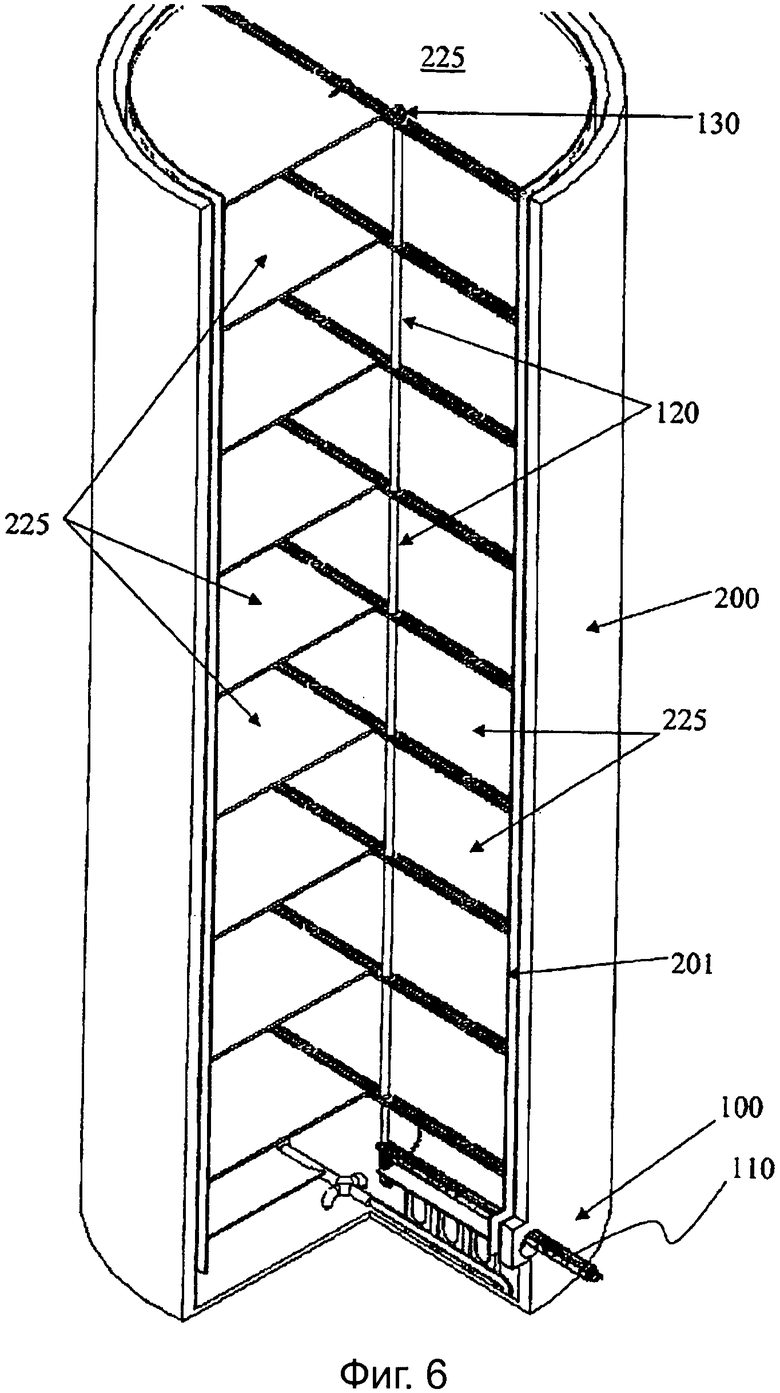
Фиг.6 демонстрирует другой вид ВСР предыдущих фигур в установленном и выдвинутом положении в парогенераторе в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
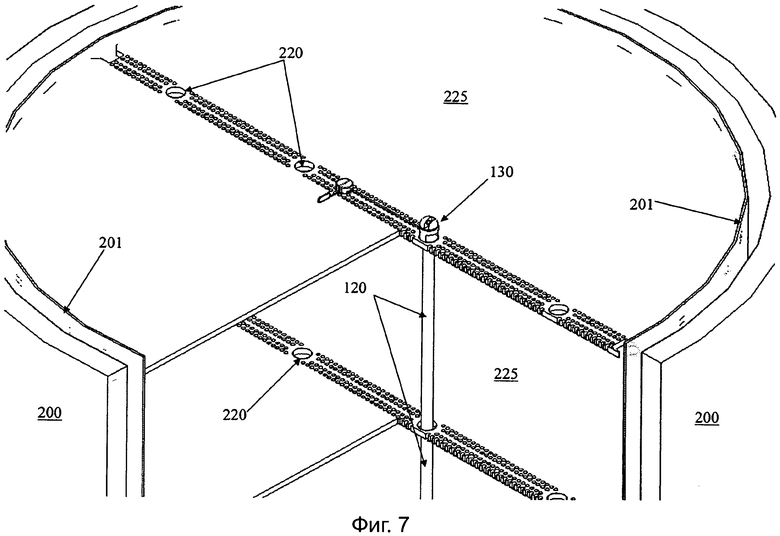
Фиг.7 демонстрирует другой вид ВСР предыдущих фигур в установленном и выдвинутом положении в парогенераторе, при котором выведен ровер, в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
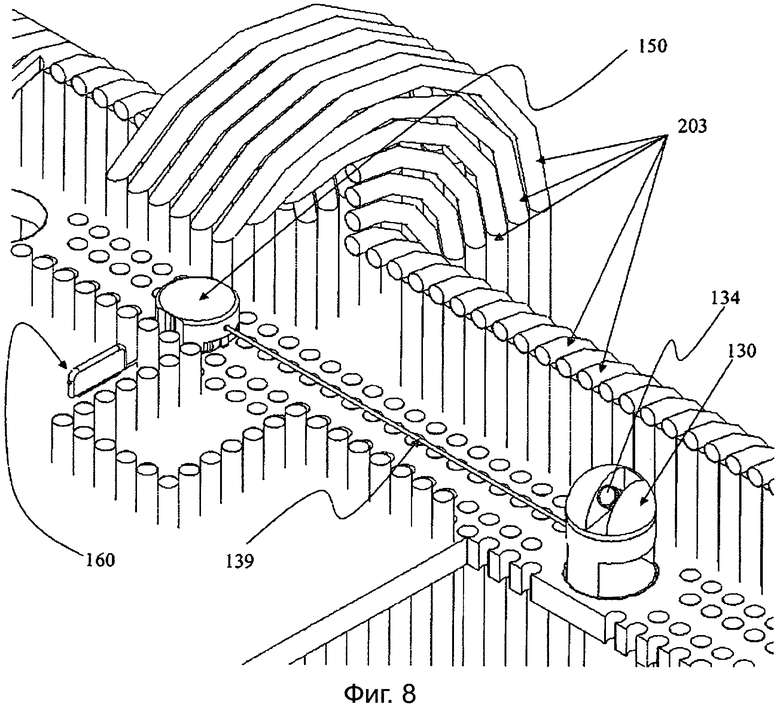
Фиг.8 демонстрирует другой вид подающей капсулы, выведенного ровера и выведенного внутриузлового ровера в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
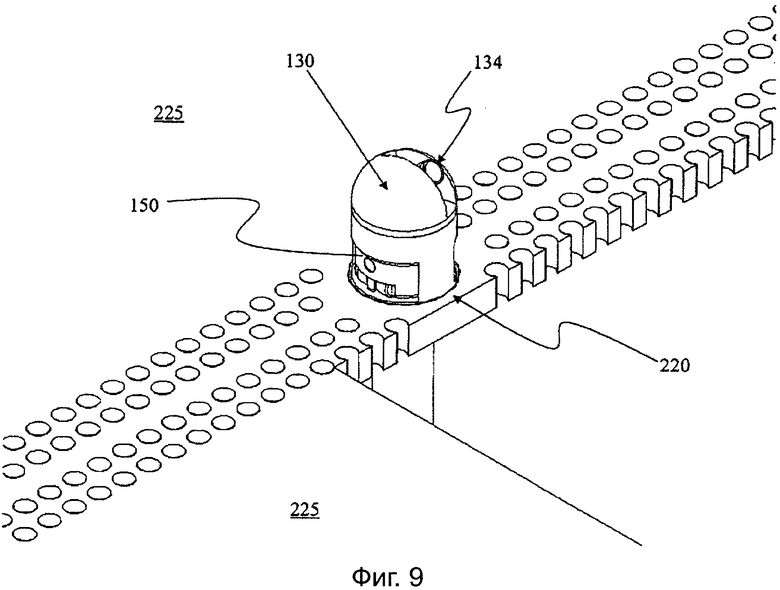
Фиг.9 демонстрирует вид подающей капсулы с ровером, находящимся внутри, в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
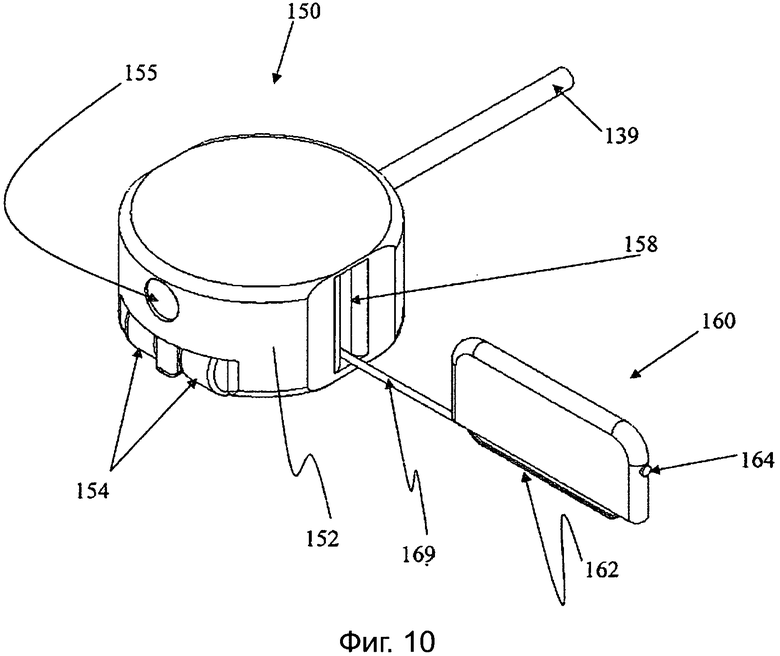
Фиг.10 демонстрирует вид выведенного ровера и выведенного внутриузлового ровера в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
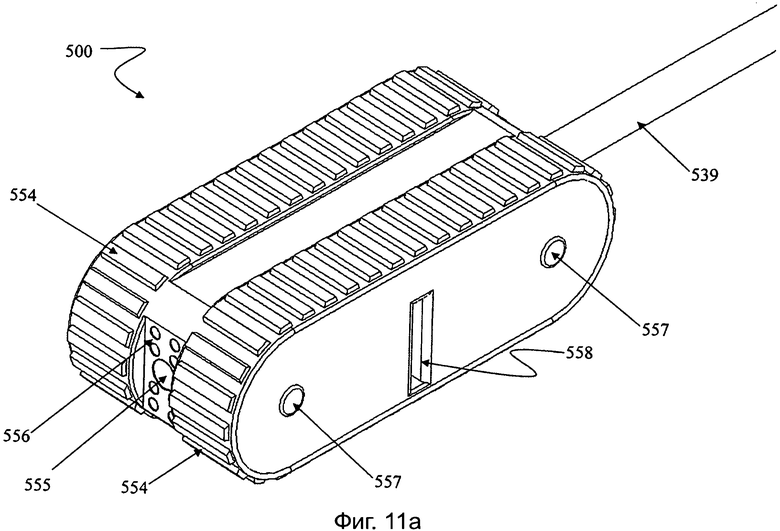
Фиг.11а демонстрирует другой вариант осуществления движущегося устройства обследования, предназначенного для осмотра парогенераторов в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
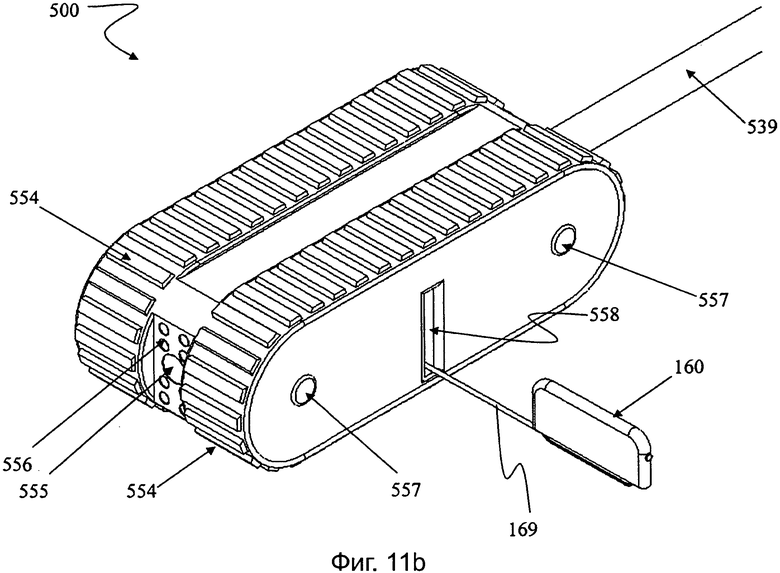
Фиг.11b демонстрирует движущееся устройство обследования Фиг.11а, развертывающее внутриузловой ровер в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
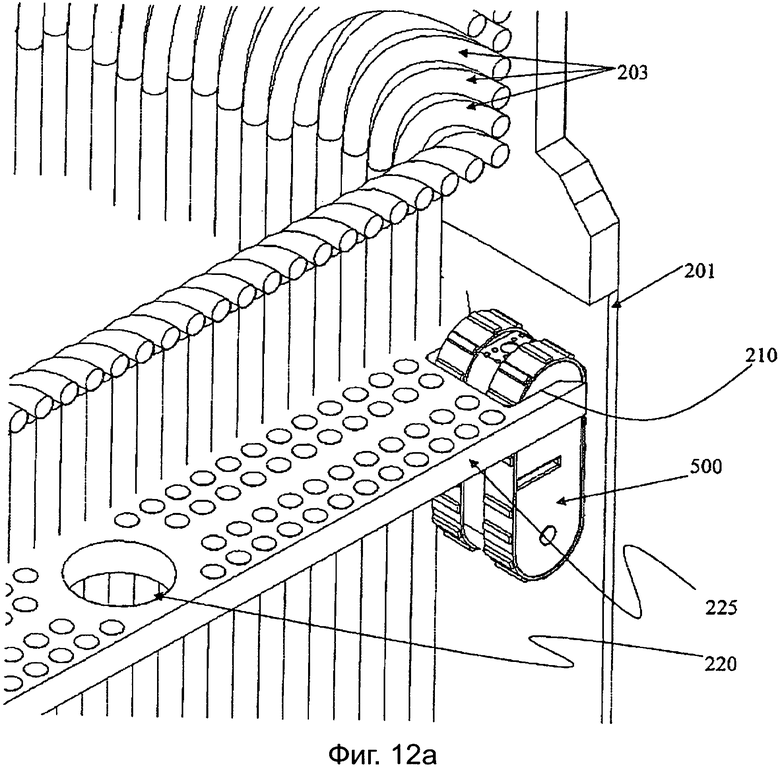
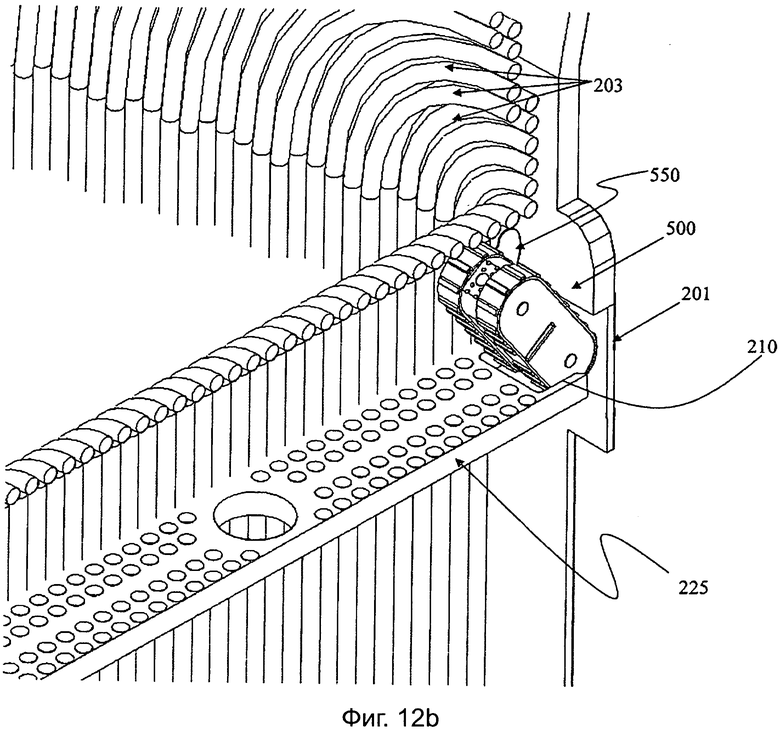
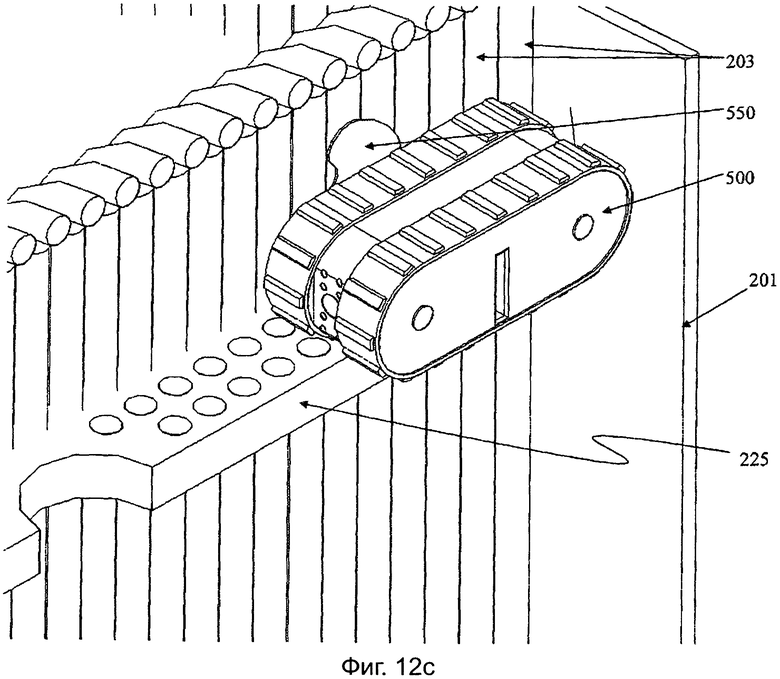
Фиг.12а-12с демонстрируют последовательность движений движущегося устройства обследования Фиг.11а-11b в соответствии, по меньшей мере, с несколькими аспектами данного изобретения в переходе от движения вдоль обмотки парогенератора к опорной плите парогенератора.
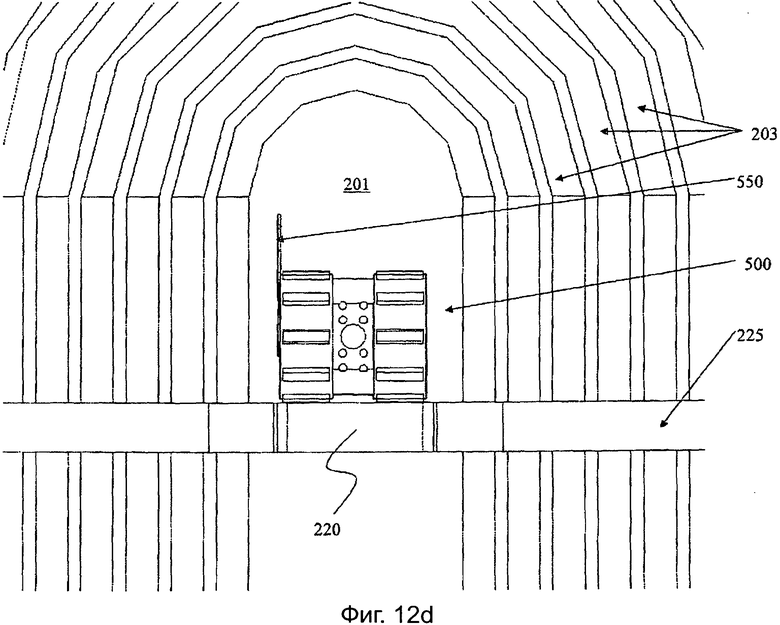
Фиг.12d - вид спереди движущегося устройства обследования в соответствии, по меньшей мере, с несколькими аспектами данного изобретения, расположенного на верхней опорной плите парогенератора.
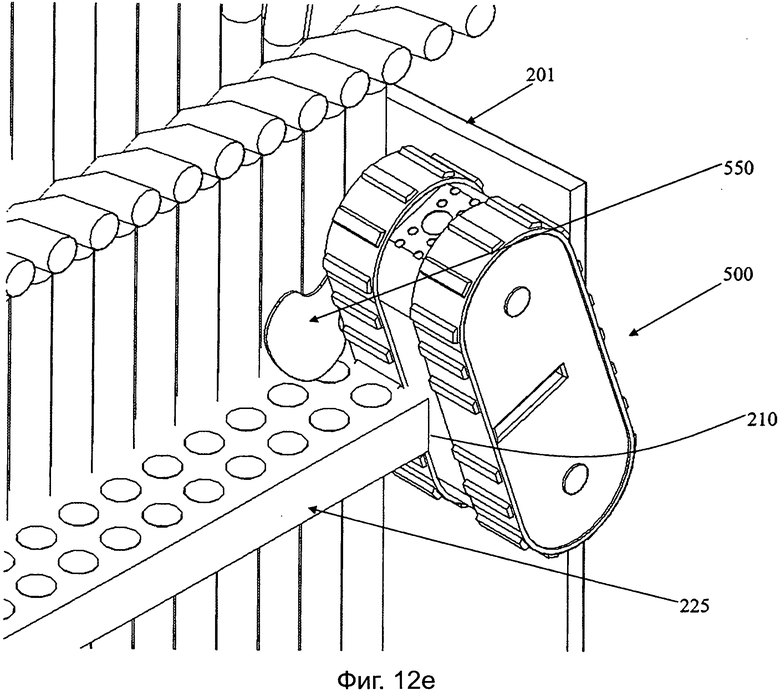
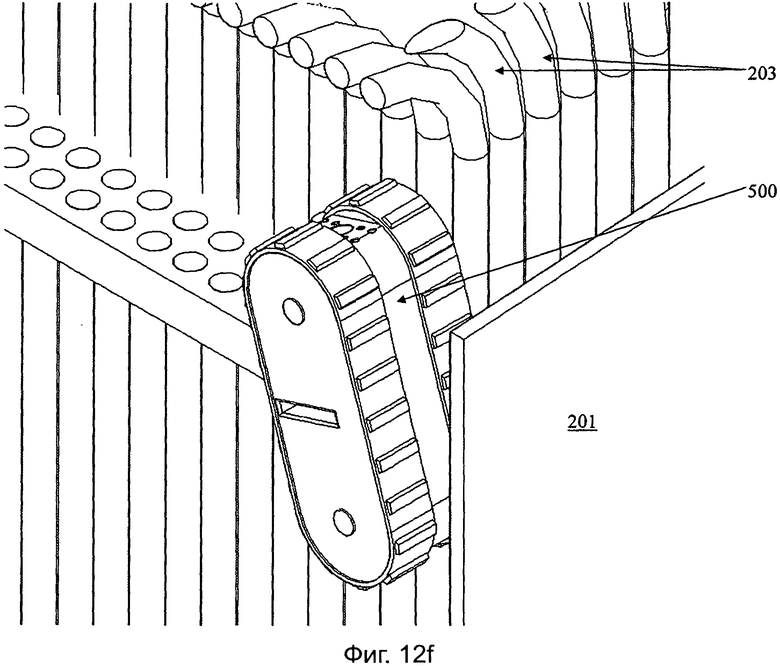
Фиг.12e-12f демонстрируют последовательность передвижений движущегося устройства обследования Фиг.11а-11b в соответствии, по меньшей мере, с несколькими аспектами данного изобретения в переходе от движения вдоль опорной плиты парогенератора до обмотки парогенератора.
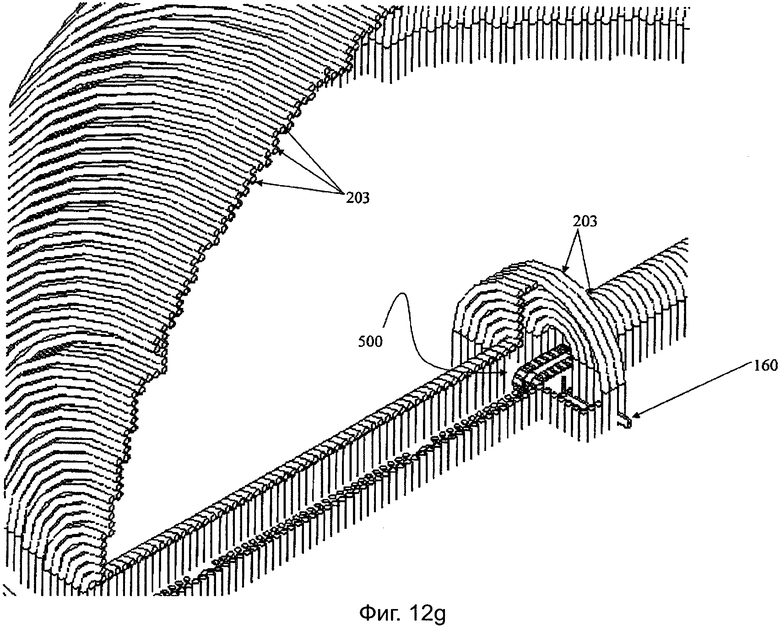
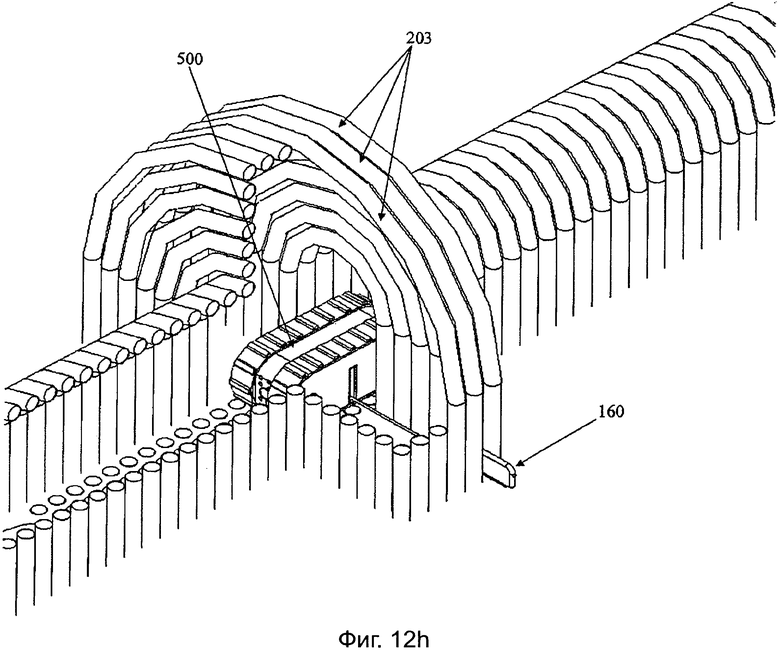
Фиг.12g-12h являются поперечным сечением движущегося устройства обследования, развертывающего внутриузловой ровер в соответствии, по меньшей мере, с несколькими аспектами данного изобретения на верхней опорной плите парогенератора.
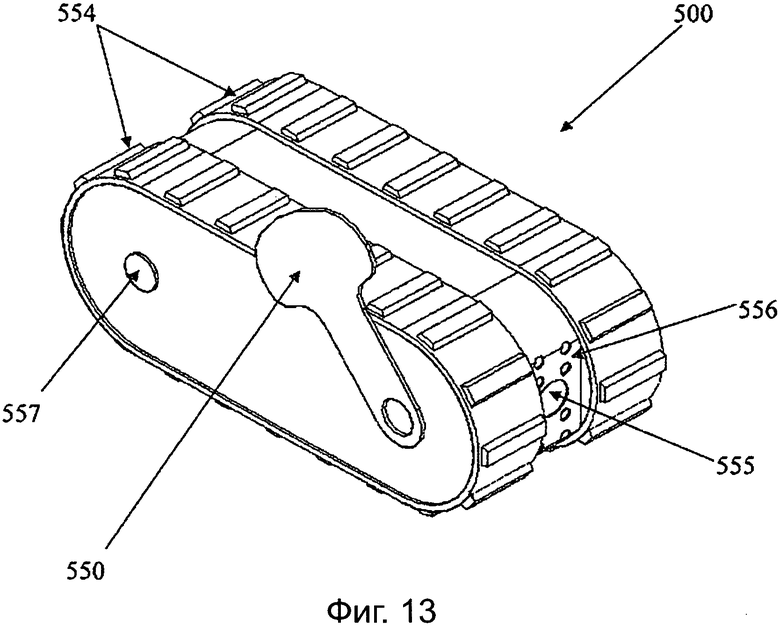
Фиг.13 демонстрирует другой вид движущегося устройства обследования фиг.11а-11b в соответствии, по меньшей мере, с несколькими аспектами данного изобретения.
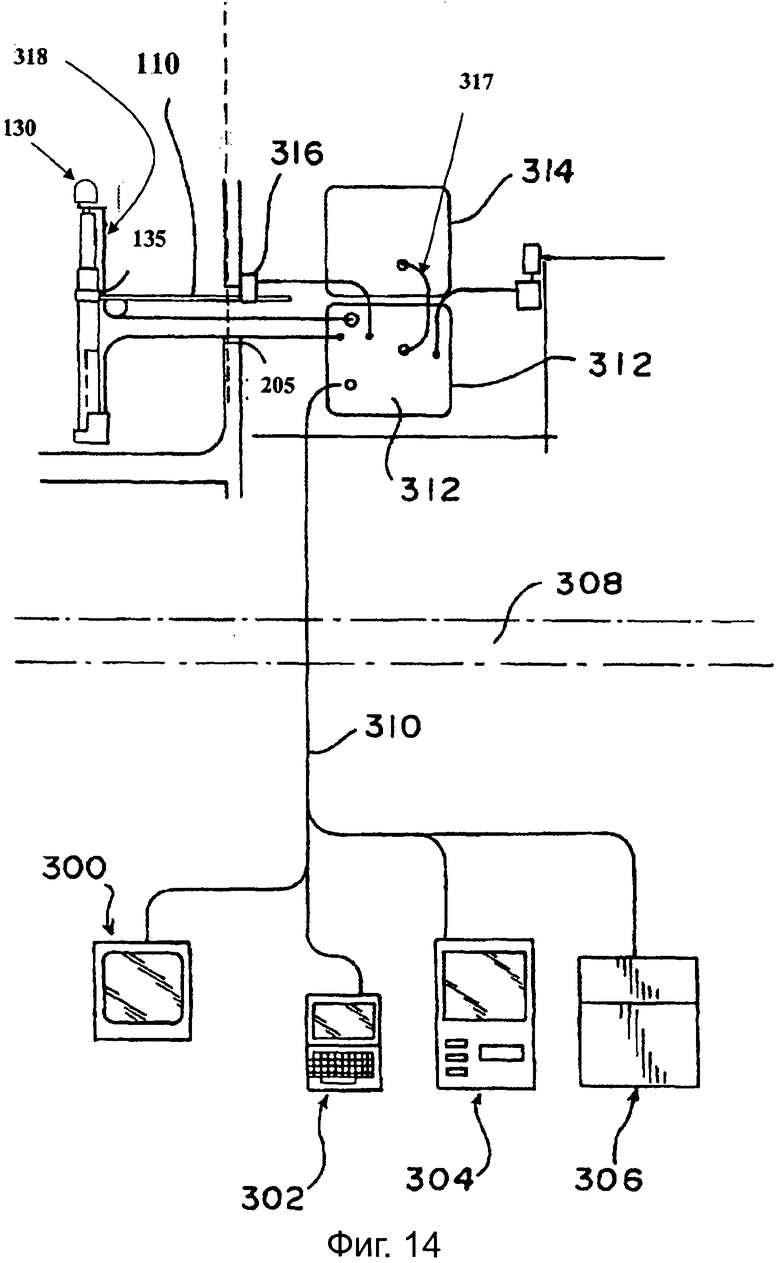
Фиг.14 демонстрирует пример компоновки органов управления ВСР на фиг.1-10.
Данное изобретение возможно в различных модификациях и альтернативных формах, а здесь для примера подробно описываются и приводятся на схемах конкретные варианты осуществления. Однако необходимо понимать, что изобретение не ограничивается приведенными конкретными формами. Скорее изобретение должно включать в себя все модификации, их эквиваленты и альтернативы, передающие сущность изобретения, как они определяются в пунктах формулы изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг.1-9 демонстрируют различные аспекты вертикальной системы развертывания (ВСР) 100, в целом соответствующие по структуре устройству для обследования внутренней части парогенераторов, раскрытому в патенте США №6,145,583, выданному 14 ноября 2000 г., каковое создано для визуального обследования трубок парогенератора, включая верхние части трубок парогенератора, верх и низ опорных плит, сварные швы между обмоткой и опорой и другие внутренние части парогенератора.
В целом, ВСР 100 разработана для вертикального подъема инструментов, датчиков, приборов и/или полезного груза на высоту 30-33 фута и более в зависимости от структуры конкретного типа парогенератора, подлежащего обследованию. На соответствующих фигурах представлен парогенератор FRAMATOME модели 68/19, но ВСР можно использовать и в других парогенераторах, например в парогенераторе Westinghouse Model F и в других парогенераторах. ВСР 100 можно развертывать на моделях парогенераторов, имеющих перегородки для распределения потока (ПРП) 275 (см. фиг.3) в центре или под лючками для обслуживания, которые имеют отверстие в парогенераторе диаметром минимум 4" (102 мм). В альтернативной конфигурации развертываемая опора может быть использована вместе с направляющими в сборе 110, которые обеспечивают опору компоненту или поверхности другого парогенератора. В еще одной конфигурации направляющие в сборе можно просто подсоединить к входному отверстию 205 таким образом, чтобы направляющие в сборе свободно свисали в парогенераторе. Опорные плиты парогенератора 225 также должны иметь отверстия для потока, приблизительно 3,5" (89 мм) в диаметре или аналогичные по ширине для прямоугольного выреза или более.
ВСР 100 включает в себя два основных структурных компонента, направляющие в сборе 110 (напр., «первая стрела») и телескопическую стрелу в сборе 120 (напр., «вторая стрела»). По меньшей мере в нескольких аспектах данного изобретения телескопическая стрела в сборе 120 включает в себя гидроприводной комплект многоярусных цилиндров и на дальнем конце подающую капсулу 130, описываемую ниже.
Направляющие в сборе 110 ВСР 100, как показано на фиг.1-5, например, помещаются через входное отверстие 205 стенки парогенератора 200 и подсоединяются к отгибу входного отверстия (не показан) с помощью монтажной плиты входного отверстия (не показана). Когда направляющие в сборе 110 подсоединены на ближнем конце к входному отверстию 110, направляющие в сборе представляют собой стабилизирующую подпорку, которая обеспечивает стабильность системы для развертывания телескопической стрелы в сборе 120, как приводится в патенте США №5,265,129, патенте США №5,504,788 и патенте США №6,145,583, каждый из которых полностью включен в настоящую заявку посредством ссылки. Направляющие в сборе 110 присоединяются на отдаленном конце к телескопической стреле 120 с помощью вращательного фиксатора 135, который можно приводить в действие вручную или приводить в действие с помощью обычного привода, например поворотного привода или линейного привода.
По меньшей мере в одной конфигурации реечно-приводной сервомотор присоединяется к установочной плите входного отверстия и изогнутая рукоятка 140 приводит в движение сцепление (напр., передачу(и) или передачу(и) и тягу), прикрепленное к отдаленному концу вращательного фиксатора 135, который закреплен на телескопической стреле в сборе 120. Когда ВСР 100 вставлена сквозь проход между трубками или «проход без трубок», как он иногда называется, как показано на Фиг.3-5, и закреплена, телескопическую стрелу в сборе 120 можно установить вертикально с помощью механической изогнутой рукоятки 140. Проход между трубками - это узкая область, образованная наиболее удаленной частью перевернутых U-образных трубок. Пар поступает с одной стороны U-изгиба (горячая труба), проходит по U-изгибу трубки, охлаждается холодной водой в парогенераторе и далее выходит по другой стороне U-изгиба (холодная труба). Изогнутая рукоятка 140 работает как для развертывания телескопической стрелы 120, так и для возвращения телескопической стрелы в сложенное положение для извлечения ВСР 100. Вместо рукоятки можно как альтернативу использовать один или более привод (напр., линейный привод(ы), поворотный привод(ы) или их комбинацию, и т.д.). Как показано на фиг.3, после закрепления ВСР 100 на входном отверстии 205 парогенератора 200, сложенная или развернутая ВСР проходит горизонтально в парогенератор через отбортованное входное отверстие и через обмотку парогенератора 201. В данной конфигурации телескопическая стрела в сборе 120 выравнивается практически параллельно направляющим в сборе 110, чтобы облегчить вставку через входное отверстие 205.
ВСР 100 устанавливается первоначально около основания парогенератора 200 на проход между трубками, узкую область, образованную наиболее удаленной частью перевернутых U-образных трубок 210, а более точно через «проход без трубок» этой области, как показано на фиг.3. В такой установленной конфигурации система ВСР 100 имеет размеры длиной примерно в 90", высотой примерно в 4" и шириной примерно в 4". Эту длину можно сделать больше или меньше в процессе установки с помощью вставляемой и удаляемой секции, если этого требуют параметры самой установки и требования погрешности.
Когда ВСР 100 установлена горизонтально во входное отверстие, как показано на фиг.3, телескопическая стрела в сборе 120 и подающая капсула 130, опирающиеся на нее, поднимаются в вертикальное положение на проход между трубками на высоту примерно в 30" и располагаются с помощью приведения в действие комплекта многоярусных цилиндров телескопической стрелы в сборе 120 через потоковое отверстие 220 в опорных плитах 225 парогенератора, как показано на фиг.4. Фиг.5 показывает продолжение расположения телескопической стрелы в сборе 120 и подающей капсулы 130, направляемых в последующие более высокие потоковые отверстия 220 в более высоких опорных плитах 225, как далее показано на фиг.6.
Камера 134 имеется в верхней части подающей капсулы 130 и может включать в себя зафиксированную камеру или, как показано на фиг.2b, камеру панорама-наклон-зум. Подающая капсула 130 сама может быть зафиксирована на отдаленном конце телескопической стрелы в сборе 120 или как альтернатива может быть вращательно прикреплена к нему с помощью связанной приводной системы (напр., мотор, поворотный привод, и т.д.), чтобы можно было вращать подающую камеру 130 в выбранном диапазоне. Камера 134 повышает возможности оператора управлять подающей камерой 130 вертикально через потоковые отверстия 220 и для варианта выполнения с панорамной/наклонной/зум камерой также обеспечивает возможность дополнительного визуального осмотра. Фиг.3 демонстрирует подающую капсулу 130, проходящую через внутреннее потоковое отверстие 220 над опорной плитой 225 парогенератора 200.
Направляющие в сборе 110 настроены таким образом, чтобы входить и выходить из парогенератора 200 для того, чтобы выравнивать телескопическую стрелу 120 с нужным одним из потоковых отверстий на опорной плите 225. Направляющие в сборе 110 можно слегка двигать вперед и назад или толкать, чтобы облегчить вертикальное движение телескопической стрелы в сборе 120 для обеспечения выравнивания подающей капсулы 130 с потоковым отверстием 220 в каждой опорной плите 225. Телескопическая стрела в сборе 120 может вытягиваться телескопически в любое желаемое вертикальное положение в парогенераторе 200 вдоль потоковых отверстий 220. Как отмечено выше, опорные плиты 225 располагаются через равномерные промежутки вертикально по высоте парогенератора на интервалах примерно от 3 до 6 футов, в зависимости от марки и модели парогенератора.
Как представлено на фиг.3-5, например, гидравлически контролируемая телескопическая стрела в сборе 120 приводится в движение для вертикального вытягивания на желаемую высоту в парогенераторе 200. Вертикальное движение телескопической стрелы в сборе 120 и/или горизонтальное движение направляющих в сборе 110 можно контролировать с помощью компьютера или, как альтернатива, вручную. Когда телескопическая стрела в сборе 120 первоначально развертывается в вертикальное положение на желаемом горизонтальном положении, горизонтальное положение верифицируется. Эта верификация может осуществляться или визуально (напр., по колоннам трубок или другим визуальным ориентирам) или с помощью одного или более позиционирующего датчика. Чтобы облегчить горизонтальное или боковое движение телескопической стрелы в сборе 120, предпочтительно иметь регистрирующую аппаратуру, регистрирующую аппаратуру (не показана), включающую в себя комплект регистрирующих направляющих (напр., пальцевидных выступов), которые могут выборочно пневматически приводиться в движение снаружи из сложенного положения в неподвижном положении или изнутри в развернутом положении. Когда каждый направляющий комплект развернут, один комплект направляющих контактирует с горячим участком U-образной трубки, и один комплект направляющих контактирует с «холодным» участком той же U-образной трубки.
Гидравлическое управление телескопической стрелой в сборе 120 осуществляется с помощью обычной электрической системы гидронасосов. Представленный предпочтительный гидронасос для телескопической стрелы в сборе 120 включает в себя центрифугальный лопастный насос, клапан сброса давления, два пропорциональных распределительных клапана, соленоидный запорный клапан, бак для жидкости и манометры. Управляющее напряжение и сигналы подаются с основной панели управления по одиночному кабелю, а основной переменный ток для управления насосом поступает из местного источника питания насоса. Телескопическая стрела в сборе 120 может как альтернативу иметь конструктивное решение с пневматическим приводом вместо гидравлического привода.
Работа ВСР 100 контролируется с главного поста управления, в котором или на материальном носителе информации хранятся и/или просматриваются данные от аппаратуры и камер ВСР (а также систем, развернутых ВСР). Фиг.14 является схемой одного возможного расположения органов управления для ВСР 100. Монитор зоны 300, компьютерный управляющий интерфейс 302, дополнительная вспомогательная электроника 304 и гидравлический насос 306 предпочтительно располагаются вне биооболочки 308, и их кабели 310 направлены к контролирующей электронике 312 и подачам питания и воздуха 314, которые прилегают к входному отверстию генератора 321. Зубчатая рейка и шестереночная передача 316 прикрепляются к направляющим в сборе 110, которые прикрепляются к вращательному фиксатору 135. Аппаратура управления дополнительно может быть разделена на первичную аппаратуру управления и аппаратуру пульта управления, при этом первичная аппаратура управления устанавливается на платформу парогенератора. В такой конфигурации первичная аппаратура управления включает в себя два маленьких корпуса размером с небольшой чемоданчик 312, 314, в первом содержится главный пульт управления 312, а во втором корпусе содержится магистральная система питания. Вырабатываемый станцией переменный ток и сжатый воздух подаются в эти корпусы для работы системы. Источник питания импульсного типа подает питание на компьютерное оборудование с корпуса с главным пультом управления.
Главный пульт управления 312 обеспечивает возможность ручного управления системой. Питание для нагрузки двигателей, подсветки, камер и вспомогательных схем подается из корпуса с магистральной системой питания 314 с помощью соответствующих электрических коллекторов 317. Линия 318 представляет систему управляющих кабелей для подающей капсулы 130 и всех связанных с ней систем, включая, но не ограничиваясь перечисленным, кабель электропитания, аудио/видеокабели, пневматическую линию питания и так далее, предназначенные для управления всеми системами и подсистемами подающей капсулы. Соединения всех компонентов системы оканчиваются на главном пульте управления 302. Пульт управления для устройства предпочтительно должен содержать управляющий компьютер 302, работающий под графическим пользовательским интерфейсом (напр., платформа Microsoft Windows®), связанный с ним аппарат управления 304, видеомонитор 300 и записывающее оборудование и оборудование звуковой связи. В одном из вариантов выполнения звуковая связь соединяется с платформой парогенератора и пультом управления для поддержки установки, сборки и/или эксплуатации.
Как описывается выше, ВСР 100 используется для доступа к внутренним областям парогенератора, конкретнее к различных возвышениям опорных плит 225. После развертывания отдаленного конца телескопической стрелы в сборе 120 на нужной опорной плите 225, как показано на фиг.7, робот или «ровер» 150 выводится из подающей капсулы 130, как показано на фиг.8. Ровер 150 управляется с помощью привязного кабеля/шлангокабеля 155, в котором размещаются все управляющие, видео- и вспомогательные проводники, необходимые для работы и принудительного крепления ровера 150 и всех связанных с ним систем. Оборудование для ровера 150 может включать в себя, но не ограничивается только этим, одну или более камеру или устройства видеозаписи, одну или более светодиодную сборку или другие системы подсветки, один или более инспектирующий зонд, вихретоковый датчик и механизм развертывания и/или механизмы извлечения.
Ходовая часть ровера 150 включает в себя основную раму 152, к которой прикрепляются или в которой размещаются все компоненты. На каждой стороне осевой линии рамы имеются двойные полимерные гусеничные ленты 154, которые независимо приводятся в движение соответствующими сервоприводными двигателями постоянного тока, используемыми вместе с системой регулирования по замкнутому типу, или шаговыми двигателями постоянного тока, позволяющими использовать разомкнутую систему автоматического регулирования.
Чтобы облегчить эксплуатацию и осмотр внутренней части парогенератора, на ровере предпочтительно размещается множество камер, чтобы обеспечить визуальную обратную связь не только с внутренней частью парогенератора, но и также с непосредственным окружением ровера, чтобы, в том числе, облегчить управление его передвижением. В одном из аспектов данного изобретения первая камера в сборе 155, которая может быть черно-белой камерой, или цветной камерой с подсветкой светодиодами, или инфракрасной камерой с инфракрасными светодиодами, помещается на переднюю часть гусеничной машины. В другом аспекте данного изобретения вторая камера в сборе (не показана) помещается на другую часть ровера 150 (напр., на заднюю сторону или на боковую сторону). Эти системы камер для ровера 150, где имеется совокупность камер, предпочтительно включают в себя комбинацию из цветных камер, использующих светодиодную подсветку, и инфракрасных камер, использующих инфракрасные светодиоды. Обследование прохода без трубок или других доступных участков парогенератора можно осуществить с помощью одной или более камер ровера 150, в то время как ровер надежно закреплен в подающей капсуле 130.
Внутриузловой осмотр (т.е. осмотр пространства между U-образными трубками парогенератора 203) можно осуществить путем выведения из полости или отсека хранилища 158 ровера 150 маленького механизированного внутриузлового ровера 160, который сам включает в себя видео и подсветку (цветное видео, IR, UV, CCD, etc.) и дополнительно один или более дополнительные датчики и/или инструментарий (напр., механизм извлечения). Внутриузловой ровер включает в себя приводную систему (напр., приводной ремень/ремни с механическим приводом, гусеничная лента/ы, колеса и т.д.), которая позволяет роверу для внутриузлового осмотра двигаться вбок от от ровера 150 и заходить внутрь области узла труб. Чтобы облегчить движение внутриузлового ровера 160 между U-образными трубками парогенератора, ширина внутриузлового ровера 160 должна, соответственно, быть меньше, чем пространство между прилегающими U-образными трубками (напр., менее 0,5", менее приблизительно 0,25" и т.д.) и, по меньшей мере, в одном аспекте составлять приблизительно 0,25" в ширину.
Внутриузловой ровер 160 включает в себя направленную вперед носовую камеру 164, такую как Q-SEE QMSCC ультра-мини цветную камеру, изготовленную компанией «Диджитал Периферал Системз, Инк.» (Digital Peripheral Systems, Inc.), Анахайм, Калифорния, имеющую размеры 4,6 мм в диаметре и приблизительно 17 мм в длину. В другом варианте выполнения встроенные видео и подсветка во внутриузловом ровере 160 включают в себя видеозонд, включающий гибкий кожух из нержавеющей стали, или ламинированный гибкий щуп, имеющий структурное упрочнение для обеспечения опоры для всей структуры и одновременно гибкий и содержащий все соответствующие проводники для камеры и подсветки. Как альтернатива, возможна также направленная назад камера и/или направленная вниз камера (передняя или задняя) с дополнительной подсветкой (напр., светодиодной, инфракрасной светодиодной и т.д.). Внутриузловой ровер 160 также может, как вариант, включать в себя сенсоры (напр., для неразрушающих тестов/испытаний и т.д.) и/или механизмы извлечения (напр., анкерные).
Внутриузловой ровер 160 присоединяется к роверу 150 с помощью системы кабелей (напр., электрический кабель, аудио/видеокабель и т.д.) 169, которую можно объединить внутри внешней кабельной оплетки, которая в свою очередь присоединяется к вращающемуся барабану, конфигурированному для выпуска и уборки кабельной системы 169 по мере того, как внутриузловой ровер 160 выходит наружу и возвращается внутрь, соответственно, через колонны из трубок 203 парогенератора. Внутриузловое расположение ровера 160 осуществляется, по меньшей мере, в нескольких аспектах, с помощью электронного кодирования (напр., используя преобразователь угол-код вместе с вращающимся барабаном) вместе с встроенными видеовозможностями, чтобы осуществлять обратную связь на дистанции развертывания и при положении в трубках.
Когда ВСР 100 вставлен и телескопическая стрела в сборе 120 зафиксирована в вертикальном положении, для дальнейшей стабилизации системы выпускается стабилизирующая подпорка (не показана). Телескопическая стрела в сборе 120 далее развертывается вертикально с помощью комплекта гидравлических цилиндров на желаемом возвышении опорной плиты с обратной связью по высоте, осуществляемой с помощью сенсоров, таких как струнные кодирующие устройства. Когда подающая капсула 130 размещена на желаемом возвышении, ровер 150 можно выводить из подающего корпуса на опорную плиту 225, индексировать колонны из трубок и начинать осмотр, используя его встроенную видеосистему. Свертывание системы начинается с отзыва внутриузлового ровера 160 в отсек хранилища 158 ровера 150, отзыва ровера 150 в отсек хранилища 132 подающей капсулы 130. Когда ровер 150 зафиксирован на месте, комплект многоярусных цилиндров медленно выпускает давление в гидросистеме, чтобы опустить систему в свернутое состояние, изображенное на фиг.4, а затем в убранное положение, изображенное на фиг.3, путем вращения телескопической стрелы в сборе 120. ВСР 100 можно выводить из входного отверстия 205 и убирать.
Гидравлически управляемая телескопическая стрела в сборе 120 далее активируется, позволяя устройству выдвигаться вертикально на желаемую высоту, что может позволить устройству продвигаться через следующие одна за другой потоковые отверстия опорных плит 225. Управляемая компьютером или вручную аппаратура точно и с высокой чувствительностью измеряет высоту периферического конца телескопической стрелы в сборе 120, чтобы гарантировать точное вертикальное расположение подающей капсулы в парогенераторе 200. Вместе с вертикальным развертыванием и отслеживанием вертикального положения телескопической стрелы в сборе 120 горизонтальное положение телескопической стрелы в сборе 120 также предпочтительно проверить визуально (напр., с помощью камеры подающей капсулы 134) и/или цифровым способом (напр., кодирующим устройством, механическими дистанционными аппаратами, такими как ролики или приводы, позиционные сенсоры, сенсоры распознавания образов и т.д.). Горизонтальное движение телескопической стрелы в сборе 120 можно осуществлять, например, с помощью гидравлического регистрирующего аппарата для последовательного развертывания и свертывания регистрирующих направляющих, пальцевидных подвижных элементов, настроенных для развертывания из первого положения во второе положение, обеспечивающего движение по типу «ходьбы». Когда каждый комплект регистрирующих направляющих развернут, одна направляющая будет контактировать с горячей трубкой, а на противоположной стороне другая направляющая будет контактировать с холодной трубкой той же U-образной трубки.
Таким образом, в соответствии с вышеописанными ВСР 100 и роверами 150, 160, перемещаемыми таким образом, оператор может двигать подающую капсулу на желаемую опорную плиту 225, выводить ровер 150 на желаемое место на средней линии опорной плиты и далее выводить внутриузловой ровер 160, который, как отмечено выше, включает в себя собственную приводную систему (напр., ремень(ремни), гусеничная(ые) лента(ы), колеса и т.д., которая позволяет внутриузловому наблюдающему роверу двигаться вбок от ровера на плите внутрь области узлов трубок.
Фиг.11а-11b демонстрируют магнитную систему доставки ровера 500, конфигурированную таким образом, чтобы ее можно было вставить во входное отверстие 205 (т.е. ручной лючок) парогенератора 200 или другой корпус или закрытое место. Габаритные размеры системы магнитного ровера 500 составляют приблизительно 8" в длину, 3,2" в высоту и 3,5" в ширину. Система магнитного ровера 500 выводится на моделях парогенератора, имеющих в центре или под отверстием ручного лючка перегородку для распределения потока (ПРП), имеющую входное отверстие или ручной лючок с размерами, по меньшей мере, 4" (102 мм), вырезы в обмотке в опорных плитах 3,75" (95,25 мм) в ширину и 3,6" (91,4 мм) в глубину, измеряемые от прямого участка обмотки до задней стороны выреза. Если ПРП находится выше отверстия ручного лючка, в ПРП также должны быть такие вырезы.
Оператор магнитного ровера 500 находится снаружи парогенератора (напр., на удаленном расстоянии) и использует пользовательский интерфейс (напр., графический пользовательский интерфейс, джойстик и т.д.) для осуществления сенсорной обратной связи с магнитным ровером 500 (напр., визуальная обратная связь, GPS сигнал и т.д.), чтобы управлять движением магнитного ровера. Магнитный ровер 500 включает в себя магниты из редкоземельных металлов (напр., неодим и т.п.) или электромагниты в гусеничных лентах 554 или под лентами 554 (или колесами, дополнительно имеющими скребки). Общее количество магнитов в гусеничных лентах может варьироваться. В некоторых аспектах вдоль каждый ленты имеется около двадцати магнитов. В различных аспектах общая сила магнитного поля, необходимого для надежного удержания магнитного ровера на месте при вертикальном размещении на обмотке, должна превышать 5 фунтов силы и должна предпочтительно превышать примерно 10 фунтов силы.
В качестве примера, гусеничные ленты 554 могут включать в себя резиновые ленты с зацепами или специализированные резиновые ленты с магнитными зацепами. В другом примере предлагается множество отдельных, независимо приводимых в движение электромагнитов (напр., передних, средних, задних). Магнитные гусеничные ленты 554 (или колеса) позволяют магнитному роверу 500 подниматься вертикально по внутреннему диаметру (ВД) обмотки парогенератора 201 между обмоткой 201 и узлом трубок 203 и через отверстия 210 в опорных плитах трубок 225, такие как отверстия 210 в парогенераторе FRAMATOME 68/19, как показано на Фиг.12а. Магнитные гусеничные ленты 554 (или колеса) также предпочтительно, но не обязательно, могут быть конфигурированы таким образом, чтобы позволить магнитному роверу также двигаться в перевернутом положении.
Как показано на фиг.11а-11b, для навигации предназначены направленная вперед камера 555 и связанная с ней подсветка 556 (напр., светодиодная и т.п.). Также имеется отсек хранилища 558, описанный ниже. Фиг.11b демонстрирует внутриузловой ровер 160, описанный выше, выведенный из отсека хранилища 558 магнитного ровера 500 с помощью втягивающейся системы кабелей 169, как описано ранее. Совокупность камер обследования и позиционирования (напр., HD CCD камера) 557 и соответствующая подсветка (напр., белые светодиоды) (не показана) для освещения предпочтительно размещаются в местах вокруг магнитного ровера 500, чтобы обеспечить получение обширных, возможно даже избыточных видеоданных для обратной связи по позиционированию и осмотру.
Чтобы попасть во внутриузловую область, магнитный ровер 500 использует внутриузловой ровер 160 для доставки камеры осмотра во внутриузловое пространство, что позволяет осматривать много достижимых колонн из трубок. В одном аспекте одна камера/подсветка в сборе 555 устанавливается впереди гусеничной машины, а две сборки камеры/подсветка помещаются на боковых сторонах магнитного ровера. Предпочтительно, но не необходимо, чтобы магнитный ровер 550 включал в себя комбинацию различных систем камер разного покрытия, таких как одна или более цветная(ые) камера(ы), использующая(ие) светодиодную подсветку, и одна или более инфракрасная камера, использующая инфракрасные светодиоды.
Ходовая часть магнитного ровера 500 включает в себя основную раму с двойными полимерными/магнитными гусеничными лентами 554, которые размещены на противоположных сторонах осевой линии рамы. Полимерные/магнитные гусеничные ленты 554 независимо приводятся в действие сервоприводными двигателями постоянного тока, используемыми вместе с системой регулирования по замкнутому типу, или шаговыми двигателями постоянного тока, позволяющими использовать разомкнутую систему автоматического регулирования. Вместе с магнитными лентами 554 основная рама также предпочтительно имеет внутри электромагнит или совокупность электромагнитов, которые используются во время размещения магнитного ровера 500 на разных возвышениях опорной плиты 225. На боку гусеничной несущей конструкции магнитного ровера 500 помещается приводной элемент 550, такой как электромеханическое или пневматическое плечо, конфигурированное так, чтобы способствовать переходу магнитного ровера 500 от обмотки 201 на опорную плиту 225 и, наоборот, путем отталкивания ровера от обмотки или подъема ровера к обмотке.
Фиг.12b демонстрирует магнитный ровер 500 в промежуточном положении в переходе между движением по обмотке парогенератора 201 к движению по опорной плите 225. Приводной элемент 550, упомянутый выше, конфигурирован для толкания обмотки 201, чтобы противодействовать магнитной силе, которая заставляет магнитный ровер 500 удерживаться на обмотке. Приводной элемент 550 толкает обмотку 201 и поворачивается в целом синхронно с движением вперед магнитного ровера 500, таким образом заставляя магнитный ровер отделиться от обмотки при увеличивающемся угле для усиления движения вперед магнитного ровера. В какой-то момент центр тяжести магнитного ровера 500 сдвигается существенным образом, так что сила тяжести опускает носовую часть магнитного ровера в положение, изображенное на Фиг.12с.
Как вариант, можно использовать другие устройства для отделения магнитного ровера 500 от обмотки 201, такие как, но не исключительно, пневматическую насадку, выпускающую сжатый воздух, или выдвижной линейный привод. Если магнитный ровер включает в себя совокупность электромагнитов, передние, средние, а затем задние электромагниты последовательно отключаются, чтобы осуществить отделение магнитного ровера 500 от обмотки 201 под действием приводного элемента.
Фиг.12с демонстрирует магнитный ровер 500, расположенный над отверстием 210 (не показано на Фиг.12 с), где он может далее возобновить движение по опорной плите 225 в любое желаемое место, как в целом показано на фиг.12g-12h (или, как вариант, вернуться и двигаться вниз обратно через отверстие 210).
Фиг.12d демонстрирует магнитный ровер 500 на опорной плите 225 в области прохода между трубками между горячими участками и холодными участками U-образных трубок 203. Соответственно, магнитный ровер 500 конфигурирован таким образом, чтобы и выполнять осмотр, и выводить внутриузловой ровер 160, описанный выше, и не требует использования ВСР 100, описанной выше, или других связанных с ней систем, разработанных «Р.Брукс Эссоушиэйтс» (R. Brooks Associates), Уильямсон, Нью-Йорк, приведенных в качестве примера в патенте США №6,145,583 и в патенте США №5,265,129, чтобы добраться до нужного места.
Фиг.12e-12f демонстрируют магнитный ровер 500, находящийся на середине пути к отверстию 210, когда он возвращается к контакту с обмоткой парогенератора 201, где он может возобновить движение вверх или вниз по обмотке. В данной операции приводной элемент 550 активируется иначе, чем описано выше, относительно перемещения магнитного ровера 500 на опорную плиту 225. Более определенно, приводной элемент 550 обеспечивает силу противодействия, прижимающую к опорной плите, чтобы затормозить передвижение вниз магнитного ровера 500. По мере того как магнитный ровер 500 вступает во все больший и больший контакт с обмоткой, приводной элемент 550 поворачивается в обратную сторону, так чтобы усилить движение вперед магнитного ровера. В определенный момент магнитная сила магнитов магнитного ровера 500 становится достаточной, чтобы надежно прикрепить магнитный ровер к обмотке.
Фиг.12g-12h демонстрируют внутриузловой ровер 160 в выведенном положении, при котором внутриузловой ровер для осмотра под управлением своей собственной приводной системы 162 (напр., ремень (ремни), гусеничная(ые) лента(ы), колеса и т.д.) двигается вбок от магнитного ровера 500 внутрь области узла трубок 203. Внутриузловой ровер 160 сам включает в себя, как отмечено выше, набор камер (напр., носовая, задняя, нижняя) и связанную с ними подсветку (напр., белые светодиоды), предоставляющие позиционные данные, необходимые для маневрирования и/или позиционирования внутриузлового ровера, а также для получения необходимых данных осмотра.
Магнитный ровер 500 управляется с помощью системы кабелей 539, содержащей все необходимые контролирующие, видео- и вспомогательные проводники для эксплуатации магнитного ровера, внутриузлового ровера и всех связанных с ними систем (напр., подсветка, видео, приводы и т.д.). Встроенное оборудование для магнитного ровера 500 и/или внутриузлового ровера 160 может включать в себя, но не только, устройства камера/светодиод различного типа (напр., цветная, черно-белая, инфракрасная и т.п.), которые предоставляют широкий выбор возможностей просмотра для хранящихся зондов/устройств обследования, сенсоров и инструментов и механизмов извлечения, которые могут извлекаться из отсека хранилища 558 магнитного ровера 500 или другого отсека хранилища. Например, можно использовать роботизированную руку (не показана), чтобы прикреплять и удалять разные инструменты и сенсоры к соответствующим портам внутриузлового ровера 160.
Система магнитного ровера 500 предпочтительно используется с системой организации кабелей, подобной той, что показана в заявке на патент США №12/714,090 под названием «Система обследования и процесс обследования с помощью магнитного движущегося устройства обследования», которая включена сюда полностью в качестве ссылки, для подачи и убирания кабелей необходимой длины. Такая система организации кабелей подает и управляет кабелями и трубками, связывающими магнитный ровер 500 с внешними системами (напр., компьютером, управляемым оператором, блок регулирования с открытым контуром и т.д.), и включает в себя, например, крепление фланца, которое позволяет установить систему управления кабелем во входное отверстие 205 парогенератора, и роллерный корпус, который вмещает роллеры и двигатели, которые захватывают или «зажимают» систему кабелей, чтобы жестко вводить ее или выводить из парогенератора в ответ на контрольные сигналы, подаваемые оператором на магнитный ровер, или синхронно с ними. Двигатели с электроприводом, такие как двигатели MicroMo 2842S012S + 30/1 246:1, можно использовать в сочетании с роллерами для зажима и проталкивания кабеля во входное отверстие или из него. Система управления кабелями также предпочтительно включает в себя регулятор натяжения, включающий в себя ручку, которую можно тянуть, чтобы облегчить установку кабеля, и струну, которая поддерживает натяжение кабеля(ей). Блок электрического интерфейса включает в себя контакт электрического соединения или интерфейс между внутренними электроприводными сервомоторами прямого тока системы управления кабелями и управляющим модулем, систему управления с открытым контуром (СУОК). Чтобы установить магнитный ровер 500 обследования, опорная плита управления кабелями устанавливается на входном отверстии, а магнитный ровер вставляется в парогенератор 200, и кабель (условный номер 539 на фиг.11а) пропускается через кабельный вход кабельной направляющей, которая затем устанавливается на входное отверстие. Моторизованный подающий механизм для кабеля затем устанавливается на основание входного отверстия, и кабель 539 вставляется через отверстие для кабеля путем натягивания на подпружиненную пластину. Когда кабель 539 правильно установлен между лентопротяжными колесами, подпружиненная пластина отпускается, и передний и задний кабель 539 размещается и удерживается на месте. Контейнер с кабелем размещается прямо позади системы управления кабелем, а кабель наматывается внутри таким образом, чтобы свести к минимуму любое спутывание.
Вышеприведенное описание представлено с целями демонстрации изобретения и не направлено на ограничение его представленными примерами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2593113C2 |
| РОБОТИЗИРОВАННЫЙ, МОБИЛЬНЫЙ, МОДУЛЬНЫЙ ГОРНОСПАСАТЕЛЬНЫЙ КОМПЛЕКС И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2682298C1 |
| СПОСОБ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2677413C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Роботизированная сельскохозяйственная платформа | 2024 |
|
RU2834465C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
Изобретение относится к проверке состояния парогенератора. Система обследования внутренней части парогенератора содержит первую стрелу и вторую, телескопическую, стрелу, ближний конец которой соединен шарнирно с первой стрелой, а на периферическом конце имеется подающая капсула, образующая отсек хранилища. Система обследования содержит первое роботизированное движущееся устройство обследования, соответствующее по размерам отсеку хранилища подающей капсулы и само образующее отсек хранилища, при этом устройство обследования включает в себя приводную систему, по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, систему кабелей, соединяющую первое роботизированное движущееся устройство обследования с подающей капсулой. Система обследования также включает в себя второе роботизированное движущееся устройство обследования, соответствующее по размерам отсеку хранилища первого устройства обследования. Технический результат - эффективность обследования внутренних труднодоступных участков парогенератора. 6 н. и 16 з.п. ф-лы, 23 ил.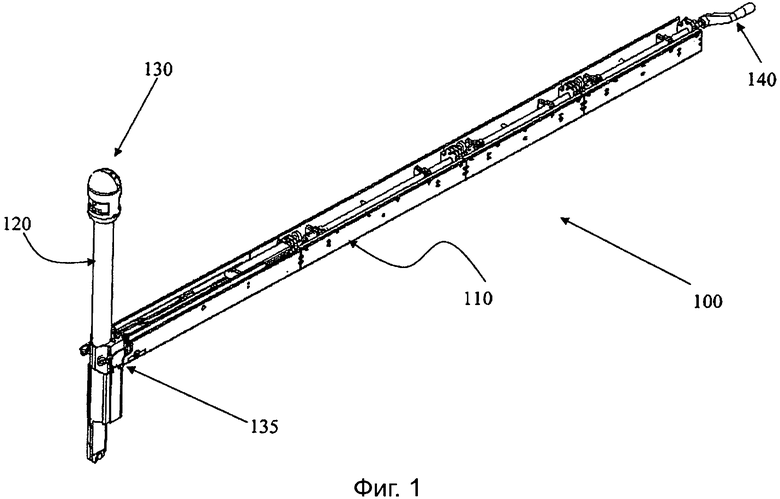
1. Система обследования парогенераторов, включающая в себя:
первую стрелу;
вторую, телескопическую, стрелу, один конец которой соединен шарнирно с первой стрелой, чтобы обеспечить поворот снизу вверх второй, телескопической, стрелы относительно первой стрелы под углом приблизительно в 90 градусов, и имеющую на втором конце подающую капсулу, образующую отсек хранилища,
первое роботизированное движущееся устройство обследования, соответствующее по размерам отсеку хранилища подающей капсулы и включающее в себя отсек хранилища, по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, а также систему кабелей, соединяющую первое роботизированное движущееся устройство обследования с подающей капсулой, и
второе роботизированное движущееся устройство обследования, соответствующее по размерам отсеку хранилища первого роботизированного движущегося устройства обследования и включающее в себя приводную систему, по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, а также систему кабелей, соединяющую второе роботизированное движущееся устройство обследования с первым роботизированным движущимся устройством обследования.
2. Система обследования по п.1, в которой подающая капсула включает в себя по меньшей мере одну камеру и по меньшей мере одну систему подсветки.
3. Система обследования по п.2, в которой первое роботизированное движущееся устройство обследования включает в себя совокупность камер и совокупность систем подсветки.
4. Система обследования по п.3, в которой второе роботизированное движущееся устройство обследования включает в себя совокупность камер и совокупность систем подсветки.
5. Система обследования по п.1, в которой первое роботизированное движущееся устройство обследования включает в себя совокупность гусеничных лент или колес.
6. Система обследования по п.1, в которой подающая капсула прикреплена с возможностью поворота к периферическому концу второй, телескопической, стрелы и снабжена приводом ее поворота по продольной оси.
7. Система обследования по п.1, в которой приводная система второго роботизированного движущегося устройства обследования имеет одну гусеничную ленту.
8. Система обследования по п.5, в которой отверстие для отсека хранилища первого роботизированного движущегося устройства обследования расположено на боковой стороне первого роботизированного движущегося устройства обследования.
9. Система обследования по п.1, в которой второе роботизированное движущееся устройство обследования имеет ширину менее чем 1,0 дюйма (2,5 см).
10. Система обследования по п.1, в которой второе роботизированное движущееся устройство обследования имеет ширину менее чем 0,5 дюйма (1,25 см).
11. Система обследования парогенераторов, включающая в себя
магнитное движущееся устройство обследования, включающее в себя приводную систему, использующую магниты, электромагниты или их комбинацию в приводном элементе, настроенном для контакта с вертикальной поверхностью, по которой вертикально движется магнитное движущееся устройство обследования, содержащей сплавы на основе железа, при этом магнитное движущееся устройство обследования образует отсек хранилища и включает в себя по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, а также систему кабелей, соединяющую магнитное движущееся устройство обследования на периферическом конце с одним или более кабелем, видеоэкраном, источником питания и контроллером вне парогенератора, и
внутриузловое роботизированное движущееся устройство обследования, имеющее размеры, соответствующие отсеку хранилища магнитного движущегося устройства обследования, и включающее в себя приводную систему, имеющую приводной элемент, по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, и систему кабелей, соединяющую внутриузловое роботизированное движущееся устройство обследования с магнитным движущимся устройством обследования.
12. Система обследования по п.11, в которой магнитное движущееся устройство обследования включает в себя совокупность камер и совокупность систем подсветки.
13. Система обследования по п.12, в которой внутриузловое роботизированное движущееся устройство обследования включает в себя совокупность камер и совокупность систем подсветки.
14. Система обследования по п.11, в которой приводной элемент включает в себя совокупность гусеничных лент или колес.
15. Система обследования по п.11, в которой приводной элемент внутриузлового роботизированного движущегося устройства обследования включает в себя одну гусеничную ленту.
16. Система обследования по п.15, в которой на боковой стороне магнитного движущегося устройства обследования расположено отверстие для отсека хранилища магнитного движущегося устройства обследования.
17. Система обследования по п.11, в которой второе роботизированное движущееся устройство обследования имеет ширину, меньшую 1,0 дюйма (2,5 см).
18. Система обследования по п.11, в которой второе роботизированное движущееся устройство обследования имеет ширину, меньшую 0,5 дюйма (1,25 см).
19. Система обследования парогенераторов, включающая в себя
первое движущееся устройство обследования, включающее в себя первую приводную систему, совокупность камер обследования и совокупность подсветок, а также раму, образующую внутренний отсек хранилища, и систему кабелей, соединяющую первое движущееся устройство обследования с отдаленным контроллером, и
внутриузловое роботизированное движущееся устройство обследования, включающее в себя вторую приводную систему, имеющее размеры, соответствующие внутреннему отсеку хранилища первого движущегося устройства обследования, совокупность камер обследования, совокупность подсветки и систему кабелей, соединяющую внутриузловое роботизированное движущееся устройство обследования с первым движущимся устройством обследования,
в котором первая приводная система состоит из двух гусеничных лент и
вторая приводная система состоит из одной гусеничной ленты.
20. Система обследования парогенераторов, включающая в себя
магнитное движущееся устройство обследования, включающее в себя корпус и приводную систему, имеющую первую гусеничную ленту и вторую гусеничную ленту, которые расположены в противолежащем положении друг относительно друга на противоположных сторонах корпуса магнитного движущегося устройства обследования, корпус магнитного движущегося устройства обследования образует отсек хранилища и включает в себя по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, а также систему кабелей, соединяющую магнитное движущееся устройство обследования на периферическом конце с одним или более кабелем системы кабелей, видеоэкран, источник питания и контроллер вне парогенератора, и
внутриузловое роботизированное движущееся устройство обследования, имеющее размеры, соответствующие отсеку хранилища магнитного движущегося устройства обследования, включающее в себя приводную систему, по меньшей мере одну камеру обследования и по меньшей мере одну систему подсветки, а также систему кабелей, соединяющую внутриузловое роботизированное движущееся устройство обследования с магнитным движущимся устройством для обследования,
в которой магнитное движущееся устройство обследования включает в себя приводной элемент, конфигурированный таким образом, чтобы в первом положении или первой серии положений отталкиваться от первой поверхности, к которой силой магнитного притяжения крепится магнитное движущееся устройство обследования, чтобы преодолеть силу магнитного притяжения между магнитным движущимся устройством обследования и поверхностью в области приводного элемента и отделить часть магнитного движущегося устройства обследования от поверхности, чтобы позволить осуществить переход магнитного движущегося устройства обследования в промежуточное состояние между первой поверхностью и второй поверхностью, и
в которой приводной элемент конфигурирован таким образом, чтобы во втором положении или во второй серии положений притормозить продвижение магнитного движущегося устройства обследования, когда магнитное движущееся устройство обследования находится в промежуточном состоянии между первой поверхностью и второй поверхностью, до того момента, пока магнитное движущееся устройство обследования не будет прикреплено силой магнитного притяжения к первой поверхности.
21. Способ передвижения движущейся системы обследования от обмотки на второй стороне парогенератора на опорную плиту второй стороны парогенератора через отверстие на опорной плите, включающий в себя следующие действия
продвижение магнитного движущегося устройства обследования, включающего в себя магнитную приводную систему, вертикально по обмотке до места под отверстием в опорной плите,
продвижение магнитного движущегося устройства обследования частично через отверстие в опорной плите,
приведение в действие приводного элемента, находящегося на магнитном движущемся устройстве обследования, для отталкивания от участка обмотки над отверстием, чтобы заставить магнитную приводную систему отделиться от обмотки, и
продвижение магнитного движущегося устройства обследования через отверстие, в то время как приводной элемент продолжает прилагать силу к участку обмотки над отверстием, чтобы заставить магнитную приводную систему последовательно отделиться от обмотки, пока сила тяжести, воздействующая на магнитное движущееся устройство обследования, не притянет магнитное движущееся устройство для обследования на опорную плиту.
22. Способ передвижения движущейся системы обследования от опорной плиты на второй стороне парогенератора на обмотку на второй стороне парогенератора через отверстие в опорной плите, прилегающей к обмотке, включающий в себя следующие действия
продвижение магнитного движущегося устройства обследования, включающего в себя магнитную приводную систему, горизонтально по опорной плите до места, прилегающего к отверстию в опорной плите,
продвижение части магнитного движущегося устройства обследования над отверстием в опорной плите,
приведение в действие приводного элемента, находящегося на магнитном движущемся устройстве обследования, для отталкивания от участка опорной плиты, прилегающего к отверстию, чтобы затормозить движение вперед магнитного движущегося устройства обследования,
продвижение магнитного движущегося устройства обследования на другую сторону отверстия, пока магнитная приводная система не вступит в контакт с обмоткой, при этом приводной элемент прилагает силу к участку опорной плиты, прилегающей к отверстию,
продвижение магнитного движущегося устройства обследования частично через отверстие, при этом участок магнитной приводной системы контактирует с обмоткой, при этом приводной элемент прилагает силу к участку опорной плиты, прилегающей к отверстию, и
убирание приводного элемента после того, как магнитная приводная система магнитного движущегося устройства обследования достаточно прикрепляется к обмотке, чтобы независимо поддерживать магнитное движущееся устройство обследования.
| US4231419 A, 04.11.1980 | |||
| US6887014 B2, 03.05 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US5451135 A, 19.09.1995 | |||
| US5388528 A, 14.02.1995 | |||
| ДРАГУНОВ Ю.Г.И ДР | |||
| УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОГО ВЫЗОВА ТЕЛЕФОННЫХ АППАРАТОВ | 1922 |
|
SU1000A1 |
| Атомная жэнергия, 2008, том 104, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

