Предлагаемое изобретение предназначено для измерения угла отклонения поверхности контролируемых объектов от базового уровня, профиля и кривизны поверхностей деталей в машиностроении.
Известен способ для определения углового положения поверхности объекта и устройство для его реализации - координатно-измерительная машина (Неразрушающий контроль и диагностика [Текст]: справочник / В.В. Клюев, Ф.Р. Соснин, А.В. Ковалев [и др.]; под ред. В.В. Клюева. - 3-е изд., перераб. и доп. - М.: Спектр: Машиностроение, 2005. - 656 с.), функционирование которой основано на использовании набора контактных или бесконтактных датчиков, с помощью которых определяется расстояние от базового уровня до нескольких точек контролируемой поверхности и по результатам измерений делается заключение об угловом положении контролируемой поверхности.
Недостатком известного способа и устройства его реализующего являются большие временные затраты на установку, тарировку датчиков и обработку результатов измерений.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения угловых положений поверхности объекта (АС №1682784, G01B 21/22, опубл. 07.01.1991 г.), заключающийся в том, что на контролируемую поверхность наносят зеркально-отражающий участок покрытия, формируют поток излучения, формируют образцовую зеркально-отражающую поверхность, при циклическом изменении направления потока излучения на контролируемую и на образцовую зеркально-отражающую поверхность получают отраженные опорный и измерительный потоки, регистрируют отраженные потоки излучения, преобразуют их в электрические импульсы и по временному интервалу между серединами электрических импульсов определяют угловое положение поверхности.
Известный способ осуществляется устройством (АС №1682784, G01B 21/22, опубл. 07.01.1991 г.), содержащим электродвигатель, оптическую насадку с двумя световодами, источник излучения, фотоприемник, светопроводящую систему с приемно-передающим коллектором, два компаратора с различными уровнями компарирования, формирователь уровней компарирования, два блока выделения середин электрических импульсов, блок регистрации временных интервалов.
Недостатком известного способа и устройства, его реализующего, является узкий диапазон измеряемых угловых положений контролируемой поверхности, обусловленный ограниченной длительностью сформированного зондирующего потока излучения, что в свою очередь определяется конструктивно-технологическими соотношениями размеров приемно-передающего коллектора и световода оптической насадки.
В основу изобретения поставлена задача расширения диапазона измеряемых угловых положений контролируемых поверхностей посредством увеличения времени одновременного существования зондирующего и принятого - отраженного потоков излучения.
Для достижения поставленной задачи в способе определения угловых положений поверхности объекта наносят зеркально-отражающий участок покрытия на контролируемую поверхность, формируют с помощью светопроводящей системы и световода вращающейся оптической насадки зондирующий поток излучения, при циклическом изменении направления зондирующего потока излучения на контролируемую отражающую поверхность получают отраженные измерительные потоки, регистрируют отраженные потоки излучения, преобразуют их в измерительные электрические импульсы, получают опорные электрические импульсы и по временному интервалу между серединами измерительных и опорных электрических импульсов определяют угловое положение поверхности, согласно изобретению устанавливают в оптической насадке опорную метку, напротив траектории движения опорной метки устанавливают неподвижный импульсный датчик, например вихретоковый преобразователь, в светопроводящей системе вторые концы жгутов излучающих и приемных световодов равномерно перемешивают, например, в шахматном порядке и объединяют в приемно-передающий коллектор, сформированный в виде поверхности цилиндра таким образом, что торцы излучающих и приемных световодов распределены по его поверхности, поток излучения приемно-передающего коллектора вводят в световод оптической насадки с внутренней стороны полого цилиндра оптической насадки.
Устройство, реализующее способ, содержит источник излучения, световодную систему, состоящую из двух жгутов световодов, фотоприемник, два компаратора с различными уровнями компарирования, формирователь уровней компарирования, два блока выделения середин электрических импульсов, блок регистрации временных интервалов, электродвигатель, оптическую насадку, световод оптической насадки, согласно изобретению оптическая насадка выполнена в виде полого цилиндра, световод оптической насадки установлен диаметрально в боковой стенке цилиндра, введены метка опорного сигнала, установленная на оптической насадке и выполненная, например, в виде штифта, импульсный датчик опорного сигнала, установленный на неподвижном относительно оптической насадки основании напротив траектории движения метки опорного сигнала, выход которого подключен к входу второго компаратора.
Сущность изобретения поясняется чертежами.
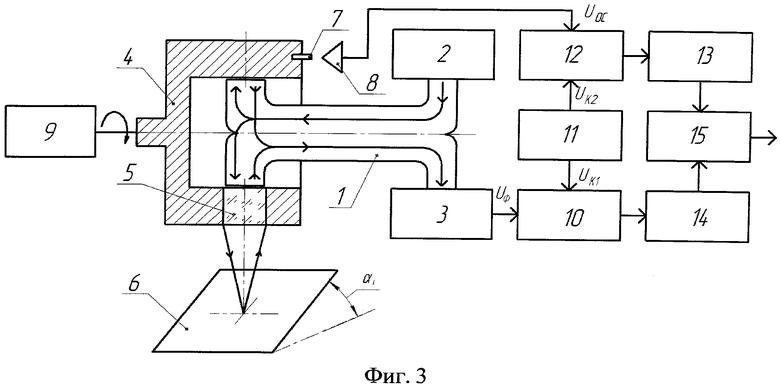
На фиг.1 приведена светопроводящая система, приемно-передающий коллектор которой выполнен в виде излучающих и приемных торцов световодных жгутов, расположенных на боковой поверхности цилиндра. На фиг.2 представлена оптическая насадка со световодом и меткой опорного сигнала, выполненной в виде штифта. На фиг.3 представлена структурная схема устройства. На фиг.4 представлены временные диаграммы электрических сигналов, отражающих сущность составных операций способа, и поясняющие работу устройства.
Устройство для определения угловых положений поверхностей объекта (фиг.3) содержит светопроводящую систему 1, выполненную из двух жгутов световодов, одни из концов которых объединены в V-образную систему, а вторые концы образуют приемно-передающий коллектор, сформированный в виде поверхности цилиндра таким образом, что торцы излучающих и приемных световодов распределены по его поверхности, источник 2 излучения, выход которого подключен к одному из жгутов световодов V-образной системы, служащему для ввода излучения в светопроводящую систему 1, фотоприемник 3, вход которого соединен со вторым жгутом световодов V-образной системы, служащим для вывода информационного светового потока, оптическую насадку 4, выполненную в виде полого цилиндра. Световод 5 оптической насадки, выполнен, например, в виде стеклянного стержня, установлен диаметрально в боковой стенке оптической насадки таким образом, что его внутренний торец расположен в непосредственной близости от элементов приемно-передающего коллектора светопроводящей системы 1, контролируемая поверхность 6, опорная метка 7 (см. фиг.2), установленная диаметрально противоположно со световодом 5 в корпусе оптической насадки 4, импульсный датчик 8 опорного сигнала (например, вихретоковый преобразователь), установленный на неподвижном относительно оптической насадки основании, напротив траектории движения метки 7 опорного сигнала (фиг.2), электродвигатель 9, ось которого соединена с осью оптической насадки 4, компаратор 10, один из входов которого подключен к выходу фотоприемника 3, а второй вход соединен с одним из выходов формирователя 11 уровней компарирования, выполненный, например, на основе потенциометрического регулятора, второй компаратор 12, один из входов которого подключен к выходу импульсного датчика 8 опорного сигнала, а второй вход соединен со вторым выходом формирователя 11 уровней компарирования, блоки 13, 14 выделения середин электрических импульсов, подключенные соответственно к выходам компараторов 12 и 10, блок 15 регистрации временных интервалов, входы которого соединены соответственно с выходами блоков 13, 14 выделения середин электрических импульсов, выход блока 15 регистрации временных интервалов является выходом устройства.
Определение углового положения контролируемой поверхности по предположенному способу осуществляется следующим образом.
Формируют поток излучения, приводят во вращательное движение оптическую насадку с расположенным в ней диаметрально световодом и меткой опорного сигнала, расположенной диаметрально противоположно световоду оптической насадки. В момент прохождения опорной метки, установленной в корпусе оптической насадки возле импульсного датчика опорного сигнала, импульсный датчик генерирует опорный электрический сигнал, регистрируют полученный электрический сигнал, выделяют середину полученного опорного импульса, положение которой на временной оси является опорным отсчетом. Зондирующий световой поток, излученный световодом оптической насадки, попадает на контролируемую поверхность, причем вследствие локальной деформации или изменения углового положения контролируемой поверхности на некоторый угол α, максимум диаграммы направленности отраженного светового потока отклоняется также на угол, пропорциональный α. Регистрируют отраженный поток и преобразуют его в электрический сигнал, затем выделяют известными способами середину электрического импульса, временное положение которой относительно опорного отсчета является информативным и пропорциональным углу α. Затем по временному расхождению между серединами информационного и опорного сигналов делают заключение о величине локальной деформации, кривизне или об угловом положении контролируемой поверхности.
Устройство, реализующее предлагаемый способ определения угловых положений поверхностей объектов (см. фиг.3), работает следующим образом.
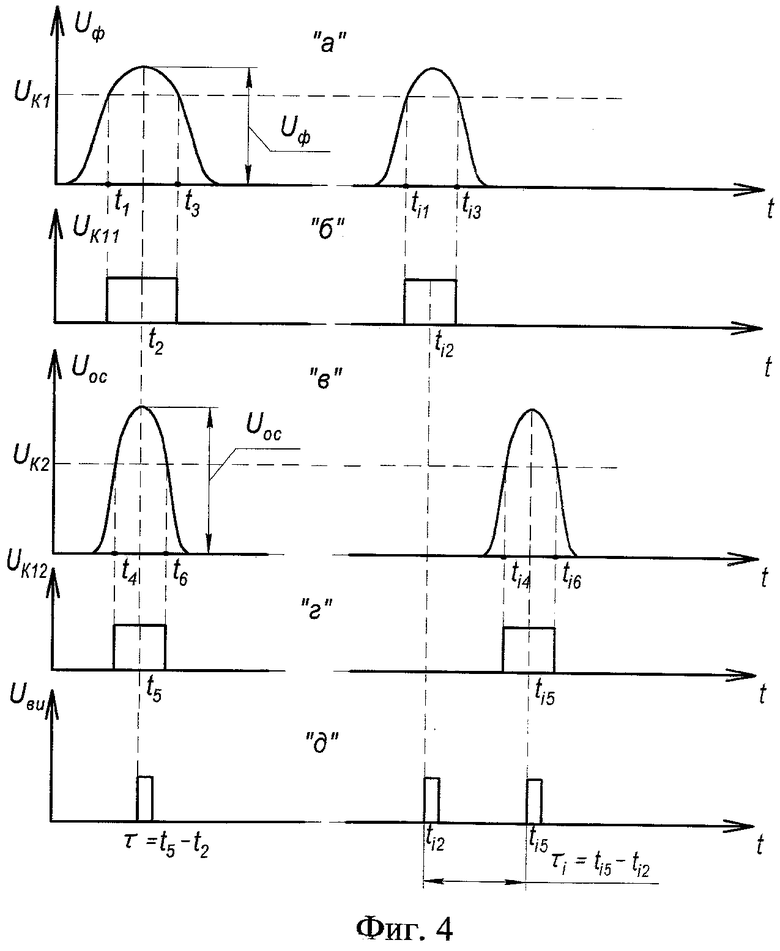
Источник 2 излучения формирует световой поток, который канализируется светопроводящей системой 1 к приемно-передающему коллектору (фиг.1). С излучающих элементов приемно-передающего коллектора световой поток направляется в световод 5 оптической насадки 4, вращаемой электродвигателем 9 с постоянной круговой частотой, с внешнего торца световода 5 зондирующий световой поток излучается в сторону контролируемой поверхности 6, угол наклона которой относительно горизонтальной плоскости равен α, пусть в исходном случае α=0 (фиг.4, временной диапазон t1-t6). Зондирующий поток, отразившийся от контролируемой поверхности 6, частично попадает на внешний торец световода 5 оптической насадки 4, далее с внутреннего торца световода 5 световой поток вводится частично в приемные элементы приемно-передающего коллектора, после этого световой поток канализируется с помощью светопроводящей системы 1 к входу фотоприемника 3. Световой поток, принятый фотоприемником 3, преобразуется в информационный электрический сигнал с амплитудой Uф (фиг.4, диаграмма «а», временной интервал t1-t3), который поступает на один из входов компаратора 10 и в моменты времени t1; t3 происходит его сравнение с уровнем компарирования UK1 (фиг.4, диаграмма «а») формирователя 11 уровней компарирования, в результате компаратор 10 вырабатывает прямоугольный электрический импульс (фиг.4, диаграмма «б»), временная отметка середины которого, соответствующая времени t2, формируется в блоке 14 определения середины электрических импульсов. Т.к. опорная метка 7 (фиг.2) расположена на одном диаметре со световодом 5, то во время формирования зондирующего светового потока она проходит мимо импульсного датчика опорного сигнала 8, который генерирует в это время опорный сигнал Uoc (фиг.4, диаграмма «в», временной интервал t4-t6).
Далее опорный электрический сигнал с выхода импульсного датчика 8 сравнивается в моменты времени t4; t6 с уровнем компарирования UK2 (фиг.4, диаграмма «в») формирователя 11 уровней компарирования и компаратор 12 вырабатывает электрический прямоугольный импульс (фиг.4, диаграмма «г»), временная отметка середины которого, соответствующая времени t5, формируется в блоке 13 определения середины электрических импульсов. После этого в блоке 15 измеряется и регистрируется временной интервал τ1 между временными отметками t2-t5 (фиг.4, диаграмма «д»). Т.к. максимумы, а соответственно и временные отметки середин информационного и опорного импульсов при α=0 совпадают, то τ=t5-t2=0. В случае отклонения контролируемой поверхности на некоторый угол αi максимум диаграммы направленности потока, отраженного от контролируемой поверхности, так же отклонится на угол αi. Поэтому середина электрического импульса (фиг.4, диаграмма «б», «д») фотоприемника 3, соответствующая максимуму диаграммы направленности потока, отраженного от контролируемой поверхности, сдвигается во времени на величину ∆ относительно опорного импульса. Затем в блоке 15 измеряется и регистрируется временной интервал τi=ti5-ti2 между временными отметками середин информационного ti2 и опорного ti5 прямоугольных импульсов (фиг.4, диаграмма «д»). После чего на основании измеренных значений τi~kαi делают заключение об угловом положении поверхности, где k - размерный коэффициент пропорциональности, связывающий между собой временные интервалы τi и угловые положения αi.
Использование предлагаемого способа определения угловых положений поверхностей и устройства, содержащих признаки, фигурирующие в предлагаемом изобретении в качестве отличительных, расширяет диапазон измеряемых угловых положений контролируемых поверхностей известного способа и устройства, его реализующего (см. АС №1682784, G01B 21/22), посредством увеличения времени одновременного существования зондирующего и принятого - отраженного потоков излучения.
Поэтому появилась возможность определения угловых положений поверхностей, измерение положения которых ранее было невозможно вследствие того, что отраженный от контролируемой поверхности световой поток не мог попасть в световодную систему во время одного периода вращения оптической насадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения угловых положений поверхности объекта и устройство для его осуществления | 1988 |
|
SU1682784A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2555505C2 |
| Способ определения деформаций лопаток вращающегося колеса турбомашины | 1985 |
|
SU1293483A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСКРУТКИ И АМПЛИТУДЫ КРУТИЛЬНОЙ СОСТАВЛЯЮЩЕЙ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337330C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2593652C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1450531A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152590C1 |
| Способ контроля целостности лопастей несущих винтов вертолёта в соосной схеме их расположения и устройство для его осуществления | 2017 |
|
RU2700535C2 |
| Способ определения безопасного положения оператора носимого и выносного противотанкового ракетного комплекса при стрельбе в положении лежа и система для его осуществления | 2017 |
|
RU2669168C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |

Изобретение к области для измерения угла отклонения поверхности контролируемых объектов от базового уровня, профиля и кривизны поверхностей деталей в машиностроении. Устройство, реализующее способ определения угловых положений поверхностей объекта, содержит источник излучения, световодную систему, состоящую из двух жгутов световодов, фотоприемник, два компаратора с различными уровнями компарирования, формирователь уровней компарирования, два блока выделения середин электрических импульсов, блок регистрации временных интервалов, электродвигатель, оптическую насадку и световод оптической насадки. При этом оптическая насадка выполнена в виде полого цилиндра, а световод оптической насадки установлен диаметрально в боковой стенке цилиндра. Кроме того, введены метка опорного сигнала, установленная на оптической насадке, импульсный датчик опорного сигнала, выход которого подключен к входу второго компаратора. Технический результат - расширение диапазона измеряемых угловых положений контролируемых поверхностей посредством увеличения времени одновременного существования зондирующего и принятого - отраженного потоков излучения. 2 н.п. ф-лы, 4 ил.
1. Способ определения угловых положений поверхностей объекта, заключающийся в том, что наносят зеркально-отражающий участок покрытия на контролируемую поверхность, формируют с помощью светопроводящей системы и световода вращающейся оптической насадки зондирующий поток излучения, при циклическом изменении направления зондирующего потока излучения на контролируемую отражающую поверхность получают отраженные измерительные потоки, регистрируют отраженные потоки излучения, преобразуют их в измерительные электрические импульсы, получают опорные электрические импульсы и по временному интервалу между серединами измерительных и опорных электрических импульсов определяют угловое положение поверхности, отличающийся тем, что устанавливают в оптической насадке опорную метку, напротив траектории движения опорной метки устанавливают неподвижный импульсный датчик, в светопроводящей системе вторые концы жгутов излучающих и приемных световодов равномерно перемешивают и объединяют в приемно-передающий коллектор, сформированный в виде поверхности цилиндра таким образом, что торцы излучающих и приемных световодов распределены по его поверхности, поток излучения приемно-передающего коллектора вводят в световод оптической насадки с внутренней стороны полого цилиндра оптической насадки.
2. Устройство, реализующее способ, содержащее источник излучения, световодную систему, состоящую из двух жгутов световодов, фотоприемник, два компаратора с различными уровнями компарирования, формирователь уровней компарирования, два блока выделения середин электрических импульсов, блок регистрации временных интервалов, электродвигатель, оптическую насадку, световод оптической насадки, отличающееся тем, что оптическая насадка выполнена в виде полого цилиндра, световод оптической насадки установлен диаметрально в боковой стенке цилиндра, введены метка опорного сигнала, установленная на оптической насадке, импульсный датчик опорного сигнала, установленный на неподвижном относительно оптической насадки основании напротив траектории движения метки опорного сигнала, выход которого подключен к входу второго компаратора.
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| RU 2007101009 A (Данилин Александр Иванович), 20.07.2008 | |||
| RU 98114287 A (Сурков В.В.), 20.05.2000 | |||
| US 20120174683 A1 (Carsten Kemnitz),12.07.2012 | |||

