Предлагаемое изобретение предназначено для измерения угла отклонения поверхности контролируемых объектов от базового уровня, профиля и кривизны поверхностей деталей в машиностроении.
Известно устройство для определения углового положения поверхности объекта - координатно-измерительная машина (Машиностроение [Текст]: энцикл.: В 40 т. / Ред. совет: К.В.Фролов (пред.) и др. - 2-е изд., испр. и доп. - М.: Машиностроение. Разд. 3.: Технология производства машин, Т.3-7: Измерения, контроль, испытания и диагностика / В.В.Клюев и др.]; Ред.-сост. В.В.Клюев; Отв. ред. П.Н.Белянин. - 2001. - 462 с.), функционирование которой основано на использовании набора контактных или бесконтактных датчиков, с помощью которых определяется расстояние от базового уровня до нескольких точек контролируемой поверхности и по результатам измерений делается заключение об угловом положении контролируемой поверхности.
Недостатком этого устройства являются большие временные затраты на установку, тарировку датчиков и обработку результатов измерений.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство (А.С. №1682784, G01B 21/22, опубл. 07.01.1991 г.), содержащее: источник излучения, фотоприемник, светопроводящую систему, состоящую из двух световодов, два компаратора с различными уровнями компарирования, формирователь уровней компарирования, два блока выделения середин электрических импульсов, блок регистрации временных интервалов, входы которого соединены с выходами блоков выделения середин электрических импульсов, концы световодов, предназначенные для направления к контролируемой поверхности, объединены в один приемно-передающий коллектор, второй конец первого световода подключен к источнику излучения, второй конец второго световода - к фотоприемнику, к выходу которого подключены первые входы компараторов, вторые входы компараторов подключены к выходам формирователя уровней компарирования, выходы компараторов подключены к входам блоков выделения середин электрических импульсов, выход блока регистрации временных интервалов является выходом устройства, оптическую насадку с двумя световодами, электродвигателем, оптическая насадка выполнена в виде цилиндра радиуса R, ось вращения которого отстоит от приемно-передающего коллектора светопроводящей системы на расстоянии L≥R+ε, где ε - технологический зазор, обеспечивающий отсутствие касания первого световода и приемно-передающего коллектора, два световода установлены в оптической насадке так, что их оптические оси совпадают с двумя взаимно-перпендикулярными диаметрами цилиндра и лежат в одной плоскости с оптической осью приемно-передающего коллектора, диаметры световодов равны диаметру d приемно-передающего коллектора, длина первого световода (3…4)/d≤11≤d(5…6), длина второго световода d/2≤12≤R-d/2 (данное устройство выбрано в качестве прототипа).
Недостатком известного устройства является узкий диапазон измеряемых угловых положений контролируемой поверхности, обусловленный ограниченной длительностью совместного существования излученного и отраженного световых потоков, что в свою очередь определяется конструктивно - технологическими соотношениями размеров приемно-передающего коллектора и световода оптической насадки.
В основу изобретения поставлена задача расширения диапазона измеряемых угловых положений контролируемых поверхностей.
Для достижения поставленной задачи в устройство определения угловых положений поверхности объекта, содержащее: источник излучения, подключенный к одному из концов V-образной световодной системы, фотоприемник, два компаратора, два блока выделения середин электрических импульсов, вход фотоприемника, подключенный ко второму концу V-образной световодной системы, а выходы фотоприемника соединены с первыми входами двух компараторов с различными уровнями компарирования, вторые входы компараторов, соединенные с выходом формирователя уровней, а выходы компараторов подключены к соответствующим входам блока выделения середин электрических импульсов, выходы которых соединены с соответствующим входами блока регистрации временных интервалов, перечисленные элементы объединены в первый унифицированный блок, оптическую насадку в виде цилиндра, электродвигатель, вал которого связан с осью оптической насадки, в которой диаметрально установлен световод, образцово-отражающую поверхность, расположенную на боковой поверхности оптической насадки таким образом, что ее центр совпадает с диаметром, взаимно перпендикулярным оси световода оптической насадки, согласно изобретению: второй световод оптической насадки установлен в насадке диаметрально таким образом, что его ось отклонена относительно оси первого световода на угол β, величина которого определена из соотношения β=2(l+r)/R, где l - радиус приемно-передающего коллектора, r - радиус световода, R - радиус оптической насадки, третий световод оптической насадки, установленный в насадке диаметрально таким образом, что его ось отклонена относительно оси второго световода на угол β, вторая образцово-отражающая поверхность, расположенная на боковой поверхности оптической насадки, параллельно первой образцово-отражающей поверхности, расположенной таким образом, что через центр первой и второй образцово-отражающей поверхности проходит диаметр оптической насадки, перпендикулярный оси первого световода, третья и четвертая образцово-отражающие поверхности, расположенные на боковой поверхности оптической насадки параллельно друг другу таким образом, что через центр третьей и четвертой образцово-отражающей поверхности проходит диаметр оптической насадки, перпендикулярный оси второго световода, пятая и шестая образцово-отражающие поверхности, расположенные на боковой поверхности оптической насадки параллельно, при этом через центр пятой и шестой образцово-отражающей поверхности проходит диаметр оптической насадки, перпендикулярный оси третьего световода, сечения, в которых находятся соответствующие оси световодов и центры образцово-отражающих участков оптической насадки, расположены произвольным образом по длине оптической насадки (например, равноудаленно друг от друга), также дополнительно содержит второй и третий унифицированные блоки, включающие в себя те же устройства, связи и порядок соединения которых, аналогичны представленным в первом унифицированном блоке, при этом оси второго и третьего световодов оптической насадки совпадают с соответствующими осями приемно-передающих коллекторов второго и третьего унифицированных блоков, микроконтроллер, выполняющий функции определения разности информационного и опорного кодов временных интервалов и установления пропорциональной связи между разностным временным интервалом и угловым положением поверхности, информация о котором, представленная в цифровом виде, на одном из выходных портов микроконтроллера, является выходным сигналом устройства.
Расширение диапазона измеряемых угловых положений контролируемых поверхностей достигается за счет установки дополнительных световодов в оптическую насадку.
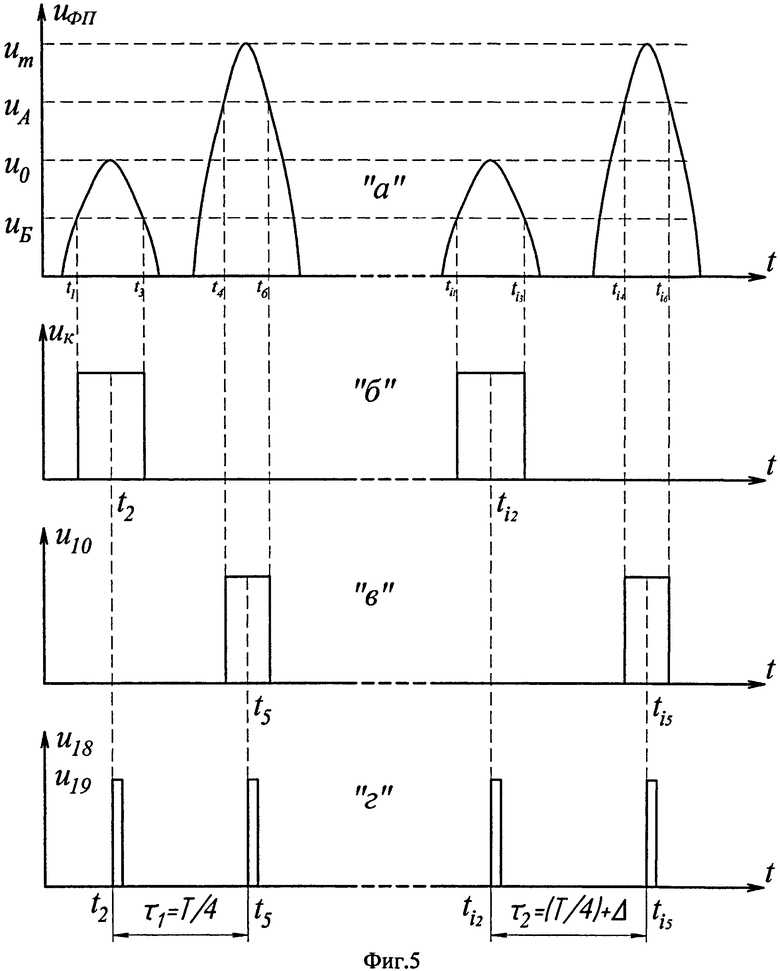
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема устройства, на фиг.2 представлена оптическая насадка со световодами и образцово-отражающими поверхностями, на фиг.3 представлены геометрические построения, определяющие величину угла β, при движении световода оптической насадки в зоне видимости приемно-передающего коллектора, на фиг.4 представлено угловое отклонение а поверхности относительно оптической насадки, на фиг.5 представлены временные диаграммы электрических сигналов, поясняющие работу устройства.
Устройство для определения угловых положений поверхностей объекта (фиг.1) содержит: 1, 2, 3 световоды (фиг.2), оптическую насадку 4, выполненную в виде цилиндра (фиг.2), в которую установлены 1, 2 и 3 световоды, которые исполнены, например, в виде стеклянных стержней, оси которых совпадают с диаметрами оптической насадки и отклонены друг относительно друга на угол β, величина которого определяется в соответствии с формулой: β=2(l+r)/R, где l - радиус приемно-передающего коллектора, r - радиус световода, R - радиус оптической насадки, электродвигатель 5, три пары образцово-отражающих поверхностей 6-7, 8-9, 10-11 (фиг.2), которые выполнены, например, путем нанесения зеркально-отражающего покрытия на локальные участки боковой поверхности оптической насадки, имеющие площадь отражающей поверхности, равную площади одного из торцов световода оптической насадки (фиг.2, 4), центры образцово-отражающих поверхностей совпадают с диаметром оптической насадки, перпендикулярным оси соответствующего световода, при этом световоды установлены произвольным образом по длине оптической насадки, например, равноудаленно друг от друга, V-образную светопроводящую систему 12, выполненную из двух световодов, одни из концов которых объединены и образуют приемно-передающий коллектор, расположенный в непосредственной близости от траектории движения торцов световода 1, один из свободных концов световодов V-образной системы подключен к источнику 13 излучения и служит для ввода излучения в светопроводящую систему 12, второй свободный конец световода V-образной системы, служащий для вывода информационного светового потока, подключен ко входу фотоприемника 14, компаратор 15, один из входов которого подключен к выходу фотоприемника 14, а второй вход соединен с одним из выходов формирователя 16 уровней компарирования, выполненный, например, на основе потенциометрического регулятора, компаратор 17, один из входов которого подключен к выходу фотоприемника 14, а второй вход соединен со вторым выходом формирователя 16 уровней компарирования, блоки 18, 19 выделения середин электрических импульсов, подключенные соответственно к выходам компараторов 15, 17, блок 20 регистрации временных интервалов, выполненный, например, на основе цифрового счетчика, входы которого соединены соответственно с выходами блоков 18, 19 выделения середин электрических импульсов, выход блока 20 регистрации временных интервалов является выходом первого унифицированного блока 21, блоки 22 и 23 являются идентичными по устройству и содержанию с блоком 21, причем оси приемно-передающих коллекторов соответствующих V-образных световодных систем блоков 21, 22, 23 отклонены друг относительно друга на угол β таким образом, что если ось световода 1 и ось приемно-передающего коллектора световодной системы блока 21 совпадают, то и оси световодов 2 и 3 оптической насадки совпадают с соответствующими осями приемно-передающих коллекторов блоков 22 и 23, выходы блоков 21, 22, 23 подключены к соответствующим входным портам микроконтроллера 24, выполняющего функции определения разности информационного и опорного кодов временных интервалов, и установления пропорциональной связи между разностным временным интервалом и угловым положением поверхности, информация о котором, представленная в цифровом виде на одном из выходных портов микроконтроллера, является выходным сигналом устройства, микроконтроллер может быть выполнен, например, на базе семейства Intel 80386.
Устройство для определения угловых положений поверхности объекта (фиг.1) работает следующим образом.
Источник 13 излучения унифицированного блока 21 и аналогичные ему источники излучения в блоках 22, 23 формируют световые потоки, которые канализируются по одному из отводов соответствующих светопроводящих систем к приемно-передающим коллекторам блоков 21, 22, 23 (см. фиг.1), и излучаются: с приемно-передающего коллектора блока 21 в направлении световода 1, с приемно-передающего коллектора блока 22 в направлении световода 2, и с приемно-передающего коллектора блока 23 в направлении световода 3, оптической насадки 4, вращаемой электродвигателем 5 с круговой частотой ω. Световые потоки, попадающие в световоды 1, 2, 3, проходят через них и излучаются в направлении контролируемой поверхности. При этом световой поток световода 1, отраженный от контролируемой поверхности, частично попадает на внешний торец этого световода, если соотношение между α и β отвечает неравенству 0<α<β и не попадает на торцы световодов 2, 3, поэтому в этом диапазоне угловых положений контролируемой поверхности работает только блок 21. Световой поток световода 2, отраженный от контролируемой поверхности поступает на внешний торец этого световода, если соотношение между α и β отвечает неравенству β<α<2β и не попадает на торцы световодов 1, 3, поэтому в этом диапазоне угловых положений контролируемой поверхности работает только блок 22. Световой поток световода 3, отраженный от контролируемой поверхности, поступает на внешний торец этого световода, если соотношение между α и β отвечает неравенству 2β<α<3β и не попадает на торцы световодов 1, 2, поэтому в этом диапазоне угловых положений контролируемой поверхности работает только блок 23. Продолжим рассмотрение устройства для случая угловых положений контролируемой поверхности, лежащих в диапазоне 0<α<β. Световой поток, частично попавший на внешний торец световода 1, проходит через него и излучается в сторону приемно-передающего коллектора светопроводящей системы 12. Принятый приемно-передающим коллектором световой поток канализируется по второму из свободных концов V-образной светопроводящей системы 12 на вход фотоприемника 14. Световой поток, принятый фотоприемником 14, преобразуется в информационный электрический сигнал с амплитудой U0 (фиг.5, диаграмма «а»), который поступает на один из входов компаратора 15 и сравнивается в моменты времени t1; t3 с уровнем компарирования UБ (см. фиг.5, диаграмма «а») формирователя 16 уровней компарирования, в результате компаратор 13 вырабатывает прямоугольный электрический импульс (см. фиг.5, диаграмма «б»), временная отметка (фиг.5 диаграмма «г») середины которого, соответствующая времени t2, формируется в блоке 18 определения середины Т электрических импульсов. Через четверть периода 
 , где
, где
Данное изобретение позволяет расширить диапазон измеряемых угловых положений контролируемых поверхностей (см. А.С. №1682784, G01B 21/22, опубл. 07.01.1991 г.) в 3 раза за счет дополнительного введения двух световодов в оптическую насадку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2548939C2 |
| Способ определения угловых положений поверхности объекта и устройство для его осуществления | 1988 |
|
SU1682784A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСКРУТКИ И АМПЛИТУДЫ КРУТИЛЬНОЙ СОСТАВЛЯЮЩЕЙ КОЛЕБАНИЙ ЛОПАТОК ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337330C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152590C1 |
| Способ определения деформаций лопаток вращающегося колеса турбомашины | 1985 |
|
SU1293483A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1450531A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА ПОВЕРХНОСТИ | 1993 |
|
RU2044270C1 |
| Способ определения безопасного положения оператора носимого и выносного противотанкового ракетного комплекса при стрельбе в положении лежа и система для его осуществления | 2017 |
|
RU2669168C1 |
| Оптический влагомер | 1985 |
|
SU1318855A1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
Изобретение относится к оптоволоконной оптике и может быть использовано для измерения угла отклонения поверхности контролируемых объектов от базового уровня, профиля и кривизны поверхностей деталей в машиностроении. Устройство содержит источник излучения, V-образную световодную систему, два компаратора, фотоприемник, оптическую насадку в виде цилиндра. Каждый из последовательно введенных в насадку световодов обеспечивает функционирование устройства в своем конкретном диапазоне угловых положений, которые последовательно перекрывают требуемый рабочий диапазон измерения углового положения контролируемой поверхности. Технический результат - расширение рабочего диапазона угловых положений контролируемых поверхностей объектов. 5 ил.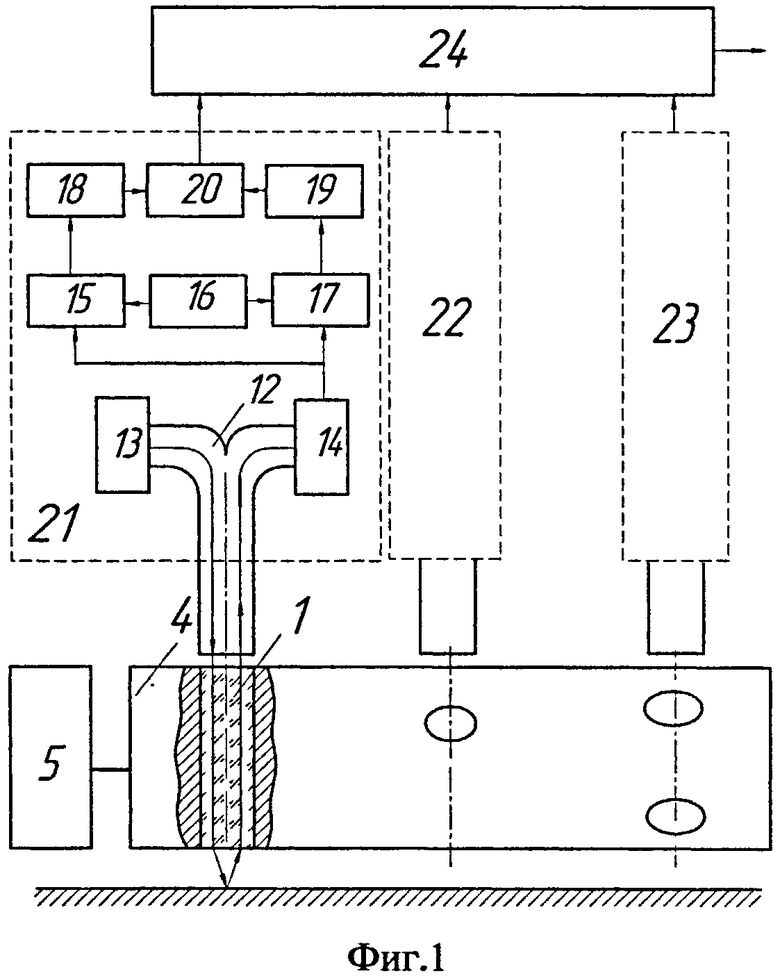
Устройство для определения угловых положений поверхностей объекта, содержащее источник излучения, подключенный к одному из концов V-образной световодной системы, фотоприемник, два компаратора, два блока выделения середин электрических импульсов, вход фотоприемника подключен ко второму концу V-образной световодной системы, а выходы фотоприемника соединены с первыми входами двух компараторов с различными уровнями компарирования, вторые входы компараторов, в свою очередь, соединены с выходом формирователя уровней, а выходы компараторов подключены к соответствующим входам блока выделения середин электрических импульсов, выходы которых соединены с соответствующим входами блока регистрации временных интервалов, объединенные в первый унифицированный блок, оптическую насадку в виде цилиндра, электродвигатель, вал которого связан с осью оптической насадки, в которой диаметрально установлен световод, образцово-отражающую поверхность, расположенную на боковой поверхности оптической насадки таким образом, что ее центр совпадает с диаметром, взаимно перпендикулярным оси световода оптической насадки, отличающееся тем, что второй световод оптической насадки установлен в насадке диаметрально таким образом, что его ось отклонена относительно оси первого световода на угол β, величина которого определена из соотношения β=2(l+r)/R, где l - радиус приемно-передающего коллектора, r - радиус световода, R - радиус оптической насадки, третий световод оптической насадки, установленный в насадке диаметрально таким образом, что его ось отклонена относительно оси второго световода на угол β, вторая образцово-отражающая поверхность, расположенная на боковой поверхности оптической насадки параллельно первой образцово-отражающей поверхности, расположенной таким образом, что через центр первой и второй образцово-отражающей поверхности проходит диаметр оптической насадки, перпендикулярный оси первого световода, третья и четвертая образцово-отражающие поверхности, расположенные на боковой поверхности оптической насадки параллельно друг другу таким образом, что через центр третьей и четвертой образцово-отражающей поверхности проходит диаметр оптической насадки, перпендикулярный оси второго световода, пятая и шестая образцово-отражающие поверхности, расположенные на боковой поверхности оптической насадки параллельно, при этом через центр пятой и шестой образцово-отражающей поверхности проходит диаметр оптической насадки, перпендикулярный оси третьего световода, сечения, в которых находятся соответствующие оси световодов и центры образцово-отражающих участков оптической насадки, расположены произвольным образом по длине оптической насадки, также дополнительно содержит второй и третий блоки, включающие в себя те же устройства, связи и порядок соединения которых аналогичны представленным в первом унифицированном блоке, при этом в статическом исходном состоянии оси второго и третьего световодов оптической насадки совпадают с соответствующими осями приемно-передающих коллекторов второго и третьего унифицированных блоков, микроконтроллер, выполняющий функции определения разности информационного и опорного кодов временных интервалов и установления пропорциональной связи между разностным временным интервалом и угловым положением поверхности, информация о котором, представленная в цифровом виде, на одном из выходных портов микроконтроллера, является выходным сигналом устройства.
| Способ определения угловых положений поверхности объекта и устройство для его осуществления | 1988 |
|
SU1682784A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ОТКЛОНЕНИЙ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 1991 |
|
RU2068990C1 |
| RU 2007101009 A, 20.07.2008 | |||
| US 5589940 A1, 31.12.1996 | |||

