Изобретение относится к измерительной технике и может быть использовано для дистанционного контроля профиля поверхности катания колеса железнодорожного состава.
Известен способ измерения параметров колес движущегося железнодорожного состава. В этом способе, описанном в работе [Байбаков, А.Н., Гуренко В.М., Патерикин В.И., Плотников С.В., Сотников В.В., Чугуй Ю.В., Юношев С.П. Автоматический контроль геометрических параметров колесных пар во время движения поезда // Автометрия. - 2004. - Т.40, №5. - С.94-103], определяется профиль поверхности катания колеса в движении с помощью лазерных триангуляторов с использованием самосканирования. На пути движения колеса формируются лазерные лучи, которые пересекаются движущимся колесом. Точки пересечения лазерного луча с поверхностью катания колеса проектируются на позиционно-чувствительный фотоприемник. Траектория перемещения проекций этих точек, получающаяся при движении колеса из-за самосканирования и регистрируемая позиционно-чувствительным фотоприемником, определяет профиль поверхности катания колеса при заданной ориентации зондирующего луча.
Основным недостатком этого способа является низкая помехоустойчивость из-за того, что информация кодируется в интенсивности рассеянного пучка, регистрируемого позиционно-чувствительным фотоприемником. Кроме того, отсутствует информация о радиусе колеса как функции полярного угла (угла поворота), в связи с чем возникают проблемы привязки измеряемого проката по кругу катания к общей конфигурации колеса.
Прототипом предлагаемого изобретения является способ [Патент РФ №2418264 Способ измерения параметров колес движущегося железнодорожного состава, 2011 г.], который заключается в том, что освещают поверхность колеса лазерными лучами и измеряют параметры рассеянного света, однозначно отображающие динамические параметры колеса, одновременно измеряют локальные линейные скорости в двух точках на разных известных расстояниях от рельса, мгновенную угловую скорость находят как отношение разности измеренных локальных скоростей к расстоянию, равному разности расстояний от этих точек до поверхности рельса, мгновенный радиус вращения находят как отношение локальной скорости движения оси колеса в направлении, параллельном рельсу, к мгновенной угловой скорости, текущий геометрический радиус колеса определяют как сумму известного расстояния от поверхности рельса до нижней точки, в которой измеряют локальную скорость, и отношения разности линейных скоростей движения оси колеса и его поверхности в нижней из двух точек к мгновенной угловой скорости, а линейную скорость проскальзывания находят как произведение разности значений радиуса вращения и геометрического радиуса колеса на мгновенную угловую скорость. Достоинством является нахождение контролируемых параметров посредством частотных измерений, что повышает помехоустойчивость.
Однако функциональные возможности этого способа ограничены, т.к. не распространяются на измерение профиля поверхности катания колес движущегося железнодорожного состава.
Задачей является расширение функциональных возможностей способа.
Задача решается тем, что в способе измерения параметров колес движущегося железнодорожного состава освещают поверхность колеса лазерными лучами и измеряют параметры рассеянного света, однозначно отображающие динамические параметры колеса, одновременно измеряют локальные линейные скорости в двух точках на разных известных расстояниях от рельса. Мгновенную угловую скорость находят как отношение разности измеренных локальных скоростей к расстоянию, равному разности расстояний от этих точек до поверхности рельса. Мгновенный радиус вращения находят как отношение локальной скорости движения оси колеса в направлении, параллельном рельсу, к мгновенной угловой скорости. Текущий геометрический радиус колеса определяют, как сумму известного расстояния от поверхности рельса до нижней точки, в которой измеряют локальную скорость, и отношения разности линейных скоростей движения оси колеса и его поверхности в нижней из двух точек к мгновенной угловой скорости. Линейную скорость проскальзывания находят как произведение разности значений радиуса вращения и геометрического радиуса колеса на мгновенную угловую скорость. В свете, рассеянном поверхностью катания, измеряют и регистрируют доплеровские сдвиги частоты по всей траектории пересечения лазерного луча с поверхностью катания. Профиль поверхности катания получают как произведение радиуса круга катания колеса на доплеровский сдвиг частоты в свете, рассеянном в точке траектории пересечения лазерного луча с поверхностью катания, нормированный на доплеровский сдвиг частоты в свете, рассеянном в точке, соответствующей радиусу круга катания.
Структура устройства, реализующего предложенный способ, приведена на фиг.1. На фиг.2 показано положение колеса относительно рельса. На фиг.3 приведен фрагмент поверхности катания колеса, профиль которой и прокат по кругу катания измеряется.
Устройство (фиг.1) содержит:
1 - колесо;
2 - лазерный измеритель радиуса, угловой скорости и линейной скорости движения оси колеса, подключенный к компьютеру;
3 - лазерное устройство, измеряющее профиль поверхности катания, подключенное к компьютеру;
4 - рельс, по которому катится колесо;
5 - компьютер.
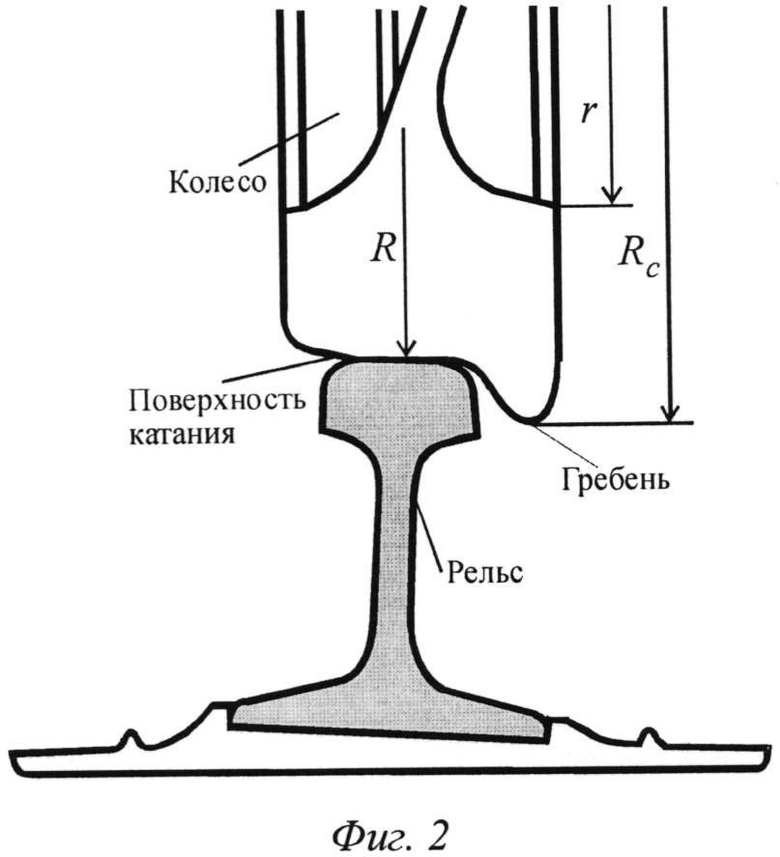
Положение колеса относительно рельса показано на фиг.2 со следующими обозначениями:
R - радиус колеса в плоскости среднего круга катания;
Rc - радиус гребня колеса;
r - радиус кольцевой проточки на внутренней поверхности колеса.
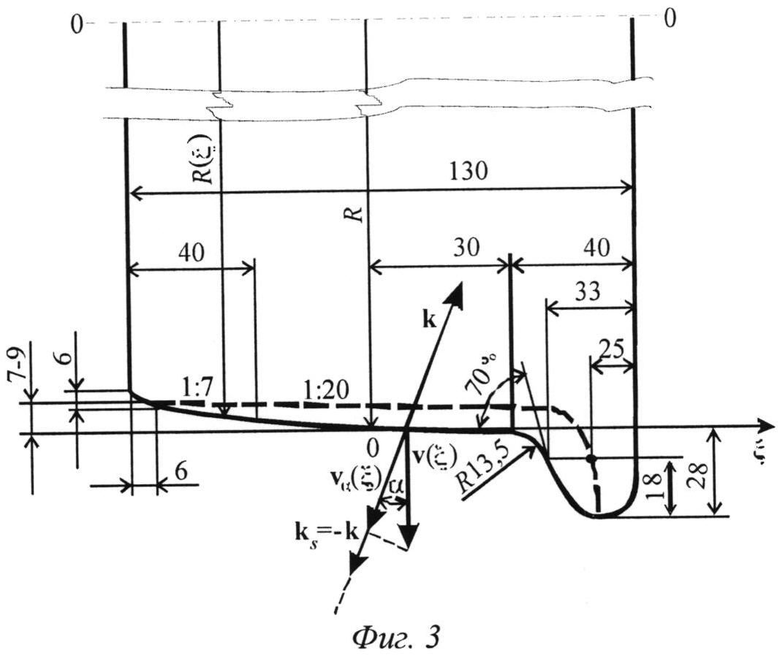
Измерение профиля поверхности катания поясняется фиг.3. На этой фигуре в качестве примера приведен профиль поверхности катания обода колеса [Колеса цельнокатаные. ГОСТ 9036-88]. Показан гребень и профиль поверхности катания (в разрезе). Цифрами указаны расстояния в миллиметрах. Прокат по кругу катания представляет собой разность между штатным (исходным) и измененным в процессе эксплуатации профилем поверхности катания. Прокат по кругу катания выше предельного, отмеченного на фиг.3 штриховой линией, является дефектом, при котором запрещена эксплуатация колесной пары. R обозначает радиус колеса в плоскости «среднего круга катания»; 0 - точка пересечения этой плоскости с профилем - соответствует нулю на координатной оси ξ ортогональной радиусу R=R(0); R(ξ) - радиус колеса в плоскости ξ параллельной плоскости среднего круга катания и пересекающей профиль в точке с координатой ξ.
Способ осуществляется следующим образом. Для контроля профиля на поверхность катания направляется лазерный пучок с волновым вектором k. Свет рассеивается в области пересечения лазерного пучка с поверхностью. На фиг.3 эта малая область обозначается точкой, координата которой ξ. В рассеянном световом поле выделяется пучок с волновым вектором ks. Частота рассеянного света отличается от частоты падающего пучка на величину частотного доплеровского сдвига, который определяется скалярным произведением вектора скорости на разность волновых векторов рассеянного и падающего световых пучков

где V(ξ) - скорость движения поверхности катания в точке с координатой ξ,
ωD - доплеровский сдвиг частоты, ωD=2πfD;
α - угол между направлением скорости V(ξ) и вектором ks-k.
На фиг.3 для определенности направление выделенного рассеянного пучка выбрано противоположным лазерному пучку ks=-k. В этом случае формула (1) для доплеровского сдвига частоты принимает вид

где k=2π/λ - волновое число;
λ - длина волны лазерного излучения.
С использованием лазерных доплеровских измерительных технологий, изложенных, например в [Дубнищев Ю.Н. Лазерные доплеровские измерительные технологии. Новосибирск: Издательство НГТУ, 2002, 416 с.], доплеровский частотный сдвиг ωD в рассеянном свете выделяется, измеряется и по нему, согласно (2) определяется скорость

Измерение доплеровского сдвига частоты ωD выполняется устройством 3, которое входит в состав измерительной системы, содержащей также измеритель радиуса R, угловой скорости и скорости проскальзывания 2, компьютер 5.
При движении состава происходит самосканирование точки пересечения лазерного пучка с поверхностью катания по оси ξ. В точке ξ=0, соответствующей пересечению поверхности с плоскостью среднего круга катания, для να(0) согласно (3) можно записать соотношение 
где 
R - радиус колеса, измеренный в плоскости среднего круга катания и
Ω - угловая скорость колеса, определяемые известным способом [Способ диагностики параметров колес движущегося железнодорожного состава (П.Я. Белоусов, О.П. Белоусова, Ю.Н. Дубнищев, В.В. Сотников). Патент РФ №2418264 от 10.05.2011. Приоритет 23.12.2009] с помощью измерителя 2.
Из выражения (4) получаем

Для скорости να(ξ), измеряемой в точке имеем

где R(ξ) - радиус колеса в плоскости, параллельной плоскости среднего круга катания и смещенной от нее на Из выражения (6) получаем с учетом (5):

Согласно формуле (7) профиль поверхности катания находится как произведение радиуса круга катания колеса на доплеровский сдвиг частоты в свете, рассеянном в точке траектории пересечения лазерного луча с поверхностью катания, нормированный на доплеровский сдвиг частоты в свете, рассеянном в точке, соответствующей радиусу круга катания. Информация о профиле поверхности катания получается на основе частотных измерений, что обеспечивает повышенную помехоустойчивость, характерную для частотных измерений. Измерение линейных скоростей в точках на поверхности колеса производится с применением лазерных доплеровских измерительных технологий [Дубнищев Ю.Н. Лазерные доплеровские измерительные технологии. Новосибирск: Издательство НГТУ, 2002, 416 с]. Оптический сигнал преобразуется в электрический, фильтруется, оцифровывается, вводится в ЭВМ и обрабатывается по заданной программе.
Использование современной фотоприемной элементной базы позволяет в применении к железнодорожному транспорту осуществлять контроль профиля поверхности катания ведущих и ведомых колес на любых штатных скоростях движения грузовых и пассажирских поездов. Реализация предложенного способа на железнодорожном транспорте позволит оперативно выявлять дефектные колеса, тем самым повышая безопасность. Таким образом, предлагаемое изобретение по сравнению с прототипом, обеспечивает возможность измерения профиля поверхности катания колес движущегося железнодорожного состава посредством частотных измерений, что повышает помехоустойчивость и снижает погрешность измерений. Реализация предложенного способа позволит оперативно выявлять дефектные колесные пары, тем самым повышая безопасность железнодорожного транспорта.
Изобретение относится к способу для дистанционного контроля профиля поверхности катания колеса железнодорожного состава. В указанном способе измерения параметров колес движущегося железнодорожного состава освещают поверхность колеса лазерными лучами и измеряют параметры рассеянного света, однозначно отображающие динамические параметры колеса, одновременно измеряют локальные линейные скорости в двух точках на разных известных расстояниях от рельса. Мгновенную угловую скорость находят как отношение разности измеренных локальных скоростей к расстоянию, равному разности расстояний от этих точек до поверхности рельса. Мгновенный радиус вращения находят как отношение локальной скорости движения оси колеса в направлении, параллельном рельсу, к мгновенной угловой скорости. В свете, рассеянном поверхностью катания, измеряют и регистрируют доплеровские сдвиги частоты по всей траектории пересечения лазерного луча с поверхностью катания. Профиль поверхности катания получают как произведение радиуса круга катания колеса на доплеровский сдвиг частоты в свете, рассеянном в точке траектории пересечения лазерного луча с поверхностью катания, нормированный на доплеровский сдвиг частоты в свете, рассеянном в точке, соответствующей радиусу круга катания. Технический результат - повышение точности измерения профиля поверхности катания колес движущегося железнодорожного состава. 3 ил.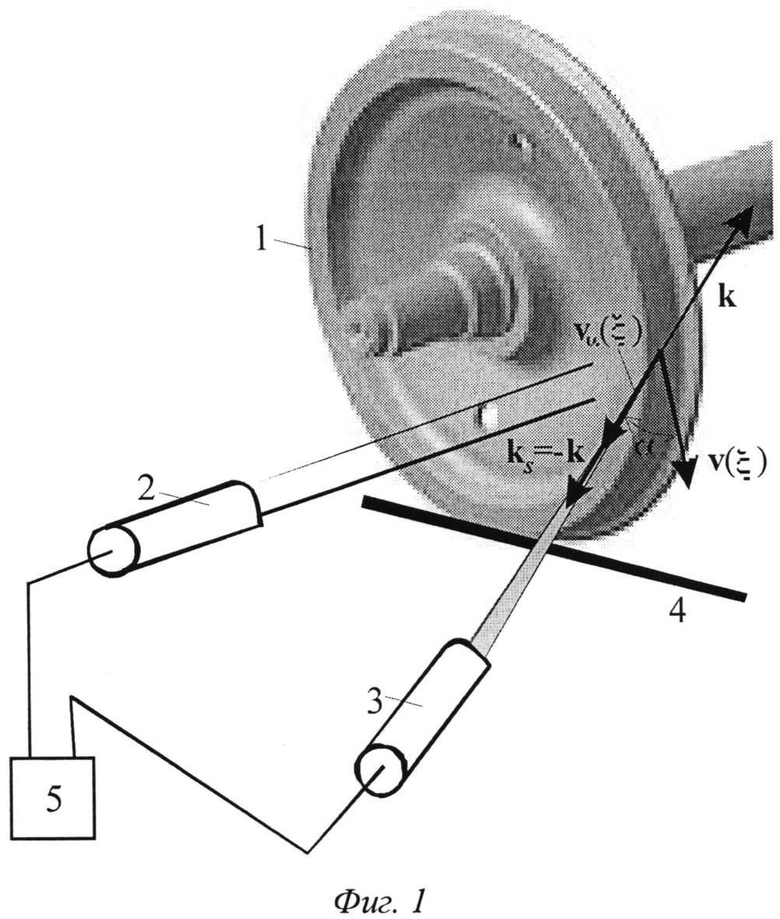
Способ измерения параметров колес движущегося железнодорожного состава, заключающийся в том, что освещают поверхность колеса лазерными лучами и измеряют параметры рассеянного света, однозначно отображающие динамические параметры колеса, одновременно измеряют локальные линейные скорости в двух точках на разных известных расстояниях от рельса, мгновенную угловую скорость находят как отношение разности измеренных локальных скоростей к расстоянию, равному разности расстояний от этих точек до поверхности рельса, мгновенный радиус вращения находят как отношение локальной скорости движения оси колеса в направлении, параллельном рельсу, к мгновенной угловой скорости, текущий геометрический радиус колеса определяют как сумму известного расстояния от поверхности рельса до нижней точки, в которой измеряют локальную скорость, и отношения разности линейных скоростей движения оси колеса и его поверхности в нижней из двух точек к мгновенной угловой скорости, а линейную скорость проскальзывания находят как произведение разности значений радиуса вращения и геометрического радиуса колеса на мгновенную угловую скорость, отличающийся тем, что в свете, рассеянном поверхностью катания, измеряют и регистрируют доплеровские сдвиги частоты по всей траектории пересечения лазерного луча с поверхностью катания, профиль поверхности катания получают как произведение радиуса круга катания колеса на доплеровский сдвиг частоты в свете, рассеянном в точке траектории пересечения лазерного луча с поверхностью катания, нормированный на доплеровский сдвиг частоты в свете, рассеянном в точке, соответствующей радиусу круга катания.
| Способ получения поливалентного анатоксина для иммунизации против анаэробных инфекций | 1955 |
|
SU103907A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕС ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ В ДВИЖЕНИИ | 2011 |
|
RU2480711C2 |
| СПОСОБ КОНТРОЛЯ ПОВЕРХНОСТИ КАТАНИЯ КОЛЕСА ПРИ ДВИЖЕНИИ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2122956C1 |
| US 20100182613 A1, 22.07.2010 | |||

