Область техники, к которой относится изобретение
Настоящее изобретение находит применение в области автоматизированной хирургии и конкретно относится к щипцам, пригодным для минимально инвазивной автоматизированной лапароскопической хирургии.
Щипцы, согласно настоящему изобретению, содержат кинематическую компоновку, снабженную способным открываться и закрываться зажимающим средством, которое монтируется на вращающемся корпусе. Щипцы, согласно изобретению, дополнительно содержат первое средство передачи движения зажимающего средства и второе средство передачи движения вращающегося корпуса.
Уровень изобретения
Существующие автоматизированные лапароскопические хирургические технологии позволяют выполнять операции с высокой точностью, обеспечивая значительные преимущества особенно при некоторых сложных операциях, в том числе тех, при которых имеется большая трудность доступа к месту операции. Настоящее изобретение, в частности, применимо к такому типу автоматизированной лапароскопической хирургии, которая является минимально инвазивной, поскольку выполняется через малые надрезы в пациенте. Эта технология широко используется в настоящее время, поэтому во многих случаях она используется в качестве альтернативы традиционной лапароскопической хирургии.
В этом типе автоматизированной хирургии используются устройства с роботизированной рукой, способной держать определенные приспособления и инструменты. В дополнение к хирургической точности, достигаемой использованием вычислений, связанных с этими операциями, с помощью таких механизмов может быть уменьшен прямой контакт хирурга с последующим снижением инфекций. Через малый надрез камеры и/или щипцы вводятся в пациента, чтобы выполнить различные операции с минимальной травмой и незначительным послеоперационным болевыми последствиями.
Термин "щипцы", как он используется здесь в соответствии с целевым использованием для задачи настоящего изобретения, должен пониматься как инструмент, предназначенный для присоединения к концу роботизированной руки. Этой роботизированной рукой обычно дистанционно управляет хирург, квалифицированный в автоматизированных лапароскопических операциях, и она конструируется так, чтобы захватывать и даже удерживать любой полезный инструмент, корпус или устройство.
Существует много типов лапароскопических щипцов, основанных на их движении и геометрии, варианты которых в значительной степени зависят от типа операции, для которой, в конечном счете, предназначены щипцы. При лапароскопической хирургической операции, как правило, используются несколько щипцов, обычно имеющих такую конфигурацию, что их дистальный конец снабжается зажимами, имеющими различные конфигурации, как упомянуто выше, например, с зубьями или без зубьев, имеющими прямую или изогнутую форму и т.д.
Один из примеров лапароскопических щипцов, используемых в автоматизированной лапароскопической хирургии, описывается в патенте США US6969385. Этот документ описывает щипцы, используемые в автоматизированном устройстве, состоящем из зажима, установленного на вращающемся корпусе. Зажим содержит пальцы, которые могут вращаться относительно друг друга. Передача вращательного движения пальцев зажима выполняется через тросы, обернутые вокруг желобчатых шкивов. Шкивы устанавливаются в соответствии с осями вращения пальцев и осью упомянутого вращающегося корпуса, который соответственно крепится к концу роботизированной руки.
Дополнительным примером передачи движения щипцов является передача движения посредством шестерней. В патенте US2009192521 описывается хирургический инструмент, состоящий из щипцов, содержащих неподвижный палец и подвижный палец. Подвижный палец щипцов приводится в движение через механизм зубчатой передачи.
Использование тросов и шкивов или шестерней в щипцах, как описано в этом документе, необходимо для передачи движения от средства привода к самим щипцам для их позиционирования и для движения зажима. Это приводит в результате к весьма сложному механизму щипцов. Эта механическая сложность очень важна в случае, когда тросы передачи движения должны пройти через сочлененный корпус, который обычно встречается в описанных выше щипцах. Тот факт, что тросы передачи должны пройти через сочлененный корпус, требует обеспечения дополнительных шкивов для возможности выполнения такой передачи движения от средства привода к зажиму.
Изобретение обеспечивает лапароскопические хирургические щипцы, имеющие конфигурацию, позволяющую передачу движения через кинематический сборочный узел, содержащий различные элементы вращения, от средства привода к вращающимся элементам. Этот кинематический сборочный узел щипцов содержит элементы, позволяющие позиционирование щипцов, и элементы, позволяющие перемещать зажимающее средство щипцов. Как будет показано здесь далее, с помощью лапароскопических хирургических щипцов, соответствующих настоящему изобретению, эта задача может быть решена с помощью простой, компактной и надежной конфигурации, приводящей в результате к дополнительным преимуществам, как будет показано далее.
Описание изобретения
Настоящее изобретение обеспечивает щипцы, пригодные для использования в роботизированной руке. Более конкретно, изобретение относится к щипцам, предназначенным для использования при выполнении минимально инвазивных лапароскопических хирургических операций, управляемых роботизированными руками.
В соответствии с изобретением, обеспечиваются щипцы для использования в автоматизированных лапароскопических хирургических операциях, имеющие основной корпус с проксимальным концом и дистальным концом. Проксимальный конец корпуса выполнен с возможностью установки в него универсального шарнира, способного выполнять два пассивных вращения. На дистальном конце основного корпуса прикрепляется кинематический сборочный узел, образованный вращающимся корпусом, который установлен на этом конце с возможностью вращения и снабжен зажимающим средством. Этот вращающийся корпус способен выполнять нескольких активных вращений.
Зажимающее средство щипцов, соответствующих изобретению, содержит по меньшей мере две подвижных части или пальца, которые могут вращаться с независимым приводом. Движение пальцев щипцов выполняется первым средством передачи движения. Для его части вращательное движение вращающегося корпуса выполняется через второе средство передачи движения. Упомянутые первое и второе средства передачи приводятся в движение средством привода, содержащим, например, электродвигатели. Объединение средства привода и первого и второго средств передачи позволяет щипцам должным образом позиционироваться и позволяет зажимающему средству открываться и закрываться, перемещая пальцы в направлениях друг к другу и друг от друга.
В соответствии с изобретением, первое и второе средства передачи движения содержат тяговые тросы, проходящие внутри основного корпуса вдоль него между проксимальным концом и дистальным концом. При использовании упомянутые тяговые тросы могут перемещаться вдоль длины упомянутого основного корпуса. Более конкретно, щипцы содержат по меньшей мере один тяговый трос, связанный с первым средством передачи движения, и один тяговый трос, связанный со вторым средством передачи движения. Первое средство передачи движения может содержать один или два тяговых троса, в зависимости от варианта осуществления щипцов, для управления одним или более пальцами щипцов, в зависимости от применения, для которого предназначены щипцы.
Каждый из упомянутых тяговых тросов образуется несколькими стальными тросами, предпочтительно, тремя, которые располагаются внутри покрывающей их оболочки. Тросы, образующие каждый тяговый трос, предпочтительно имеют круглое поперечное сечение, чтобы получить повышенную жесткость, насколько возможно, и, таким образом, избегать продольного изгиба при сжатии. При таком поперечном сечении трение тягового троса с оболочкой также уменьшается. Объединение нескольких тросов, чтобы образовать каждый тяговый трос для передачи движения щипцов обеспечивает необходимую жесткость для возможности работы как на сжатие, так и на растяжение, позволяя эффективную передачу мощности, как если бы это была передача через стержень. Геометрия поперечного сечения каждого тягового троса определяется расположением тросов, формирующих тяговый трос. В соответствии с изобретением, расположение тросов таково, что тяговый трос вблизи дистального конца основного корпуса имеет поперечное сечение с изменяемой геометрией вдоль его длины. Это условие выполняется по меньшей мере для тяговых тросов, связанных с первым средством передачи движения. Поэтому изменение геометрии поперечного сечения позволяет получить очень эффективное действие зажимающего средства.
Для конфигурации, описанной в связи с изобретением, щипцы могут вращаться вокруг первой оси и вращающийся корпус может вращаться вокруг второй оси. Первая ось и вторая ось могут располагаться, по существу, ортогонально друг другу.
В одном варианте осуществления щипцов, соответствующем изобретению, предпочтительно, чтобы изменение геометрии поперечного сечения каждого натяжного троса происходило следующим образом. Как указано выше, тяговые тросы проходят по длине через внутреннюю часть основного корпуса, определяя первую геометрическую компоновку поперечного сечения, в которой соответствующие тросы располагаются так, что в поперечном сечении их продольные оси имеют радиальную компоновку. Затем геометрия поперечного сечения тяговых тросов изменяется на вторую компоновку, в которой соответствующие кабели располагаются так, что в поперечном сечении их продольные оси располагаются в первой ориентации. Наконец, геометрия поперечного сечения изменяется на третью компоновку, в которой соответствующие тросы располагаются так, что в поперечном сечении их продольные оси располагаются во второй ориентации, отличной от упомянутой первой ориентации.
Другими словами, в первой геометрической компоновке поперечного сечения тяговых тросов, тросы каждого тягового троса на большей части длины основного корпуса располагаются радиально, так чтобы в поперечном сечении тяговые тросы имели, по существу, форму круга. Другими словами, если это тяговый трос, сформированный из трех тросов, например, как отмечено выше, тросы в таком случае могут быть расположены с их соответствующими продольными осями, по существу, в виде треугольника, если смотреть в поперечном сечении. На одном участке, соответствующем участку вблизи дистального конца основного корпуса, поперечное сечение одного и того же тягового троса изменяется на упомянутую вторую компоновку, в которой его тросы располагаются с их соответствующими продольными осями, выровненными поперек первой ориентации, например, горизонтально выровненными. Следовательно, достигается необходимая гибкость для преодоления изгиба соединения в направлении, параллельном его оси вращения. Наконец, поперечное сечение тягового троса изменяется на эту третью компоновку, при которой тросы располагаются с их соответствующими продольными осями, выровненными поперечно во второй ориентации, образуя угол с упомянутой первой ориентацией, например, 90°, то есть выравниваются вертикально. Таким образом, достигается необходимая гибкость для предотвращения сгибания соединения в направлении, перпендикулярном указанному выше.
Первое и второе средства передачи движения, содержащие дополнительные тяговые тросы, содержат вращающиеся барабаны для намотки по касательной тяговых тросов. Эти барабаны позволяют на упомянутом дистальном конце сборочного узла продольное перемещение тяговых тросов, которое должно преобразовываться во вращательное движение в двух направлениях, то есть, как для тяги, так и для сжатия, чтобы посредством вращения приводить в движение вращающийся корпус щипцов и их зажимающее средство. Упомянутые барабаны на периферии имеют канавки для намотки тяговых тросов. Вращающийся корпус щипцов образуется двумя упомянутыми барабанами, которые располагаются с перекрытием. Каждый из упомянутых барабанов для наматывания вращающегося корпуса неразъемно соединен с каждым пальцем зажима, соответственно. Изменение конфигурации поперечного сечения тяговых тросов (по меньшей мере тех, которые связаны с первым средством передачи) по мере движения вдоль их длины в направлении дистального конца основного корпуса позволяет эффективную намотку и скручивание тяговых тросов в соответствующие барабаны в обоих направлениях перемещения.
Чтобы заставить геометрию поперечного сечения каждого тягового троса изменяться, как указано, в различных плоскостях вблизи дистального конца основного корпуса, обеспечиваются несколько узлов изменения ориентации тяговых тросов. Каждый узел изменения ориентации содержит блок, прикрепленный к внутренней части удлиненного корпуса, внутри которого выполнены удлиненные каналы, имеющие форму для направления тросов каждого тягового троса с одним поворотом (например, на 90°).
Два узла изменения ориентации используются для каждого тягового троса, что делает возможными упомянутые выше два изменения формы поперечного сечения (от круговой к прямой в первой ориентации, и от прямой в упомянутой первой ориентации в прямую во второй, другой ориентации). Каждый узел изменения ориентации может иметь первый размер (ширина или высота) соответствующий, например, диаметру используемого троса, и второй размер (ширина или высота) соответствующий, например, третьему из упомянутых диаметров. Между двумя узлами изменения ориентации при одной и той же длине тягового троса его тросы помещаются внутрь плоской оболочки, пригодной для подержания его конфигурации.
Для передачи движения посредством перемещения тяговых тросов вдоль удлиненного корпуса используется средство привода, как указано выше, такое как электродвигатели. В одном варианте осуществления изобретения может быть выполнено другое средство с возможностью вращательного привода трубок с внутренней резьбой, которые устанавливаются с сохранением осевого положения внутри основного корпуса. Внутри таких трубок с внутренней резьбой находится трубка с внешней резьбой, которая крепится к внешней оболочке, внутри которой располагаются тяговые тросы. Трубка с внешней резьбой может вращаться в направлении упомянутой трубки с внутренней резьбой (сохраняя осевое направление внутри основного корпуса), так что ее вращение посредством средства привода приводит в результате к продольному движению трубки с внешней резьбой и, следовательно, продольному движению тягового троса первого средства передачи (чтобы приводить в движение пальцы зажимающего средства щипцов) или второго средства передачи (для вращательного привода движущегося корпуса при позиционировании зажимающего средства). Для щипцов, описанных выше, соответствующих изобретению, сборочный узел механически значительно упрощается в отношении щипцов по сравнению с теми, которые для той же самой цели использовались ранее, с последующим снижением затрат. При конфигурации с изменяемой геометрией поперечного сечения тяговых тросов средства привода щипцов для каждого изменения ориентации упомянутой секции возможно, в соответствии с изобретением, обойтись без использования холостых шкивов или механизмов поперечного вращения частей, в которых работают тяговые тросы. Конфигурация изобретения дополнительно позволяет получить очень устойчивый блок с большим сроком службы тросов, а также барабанов, вокруг которых они должны наматываться.
Другие задачи, преимущества и функции минимально инвазивных лапароскопических хирургических щипцов, соответствующих настоящему изобретению, станут очевидными из описания предпочтительного варианта осуществления изобретения. Это описание приводится только для примера и представлено на сопроводительных чертежах.
Краткое описание чертежей
На упомянутых чертежах:
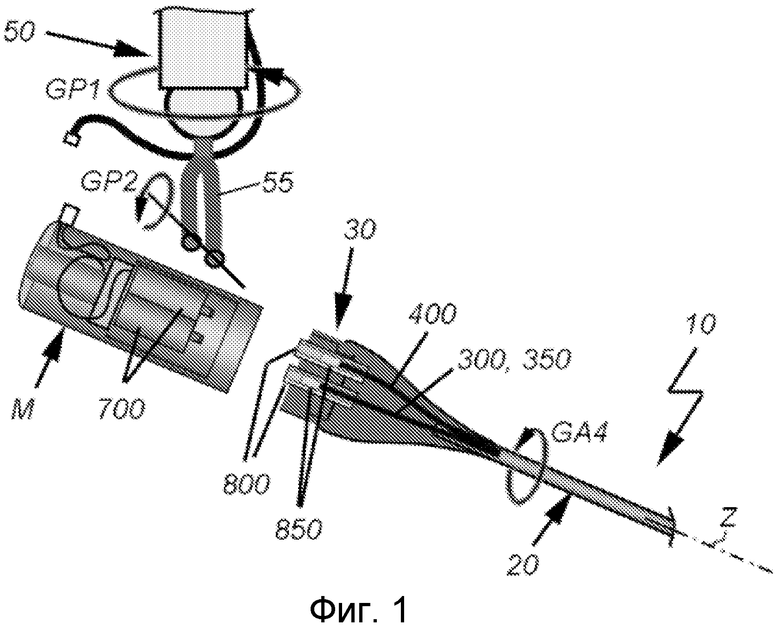
Фиг. 1 - частичный вид в изометрии основного корпуса минимально инвазивных лапароскопических хирургических щипцов, соответствующих настоящему изобретению;
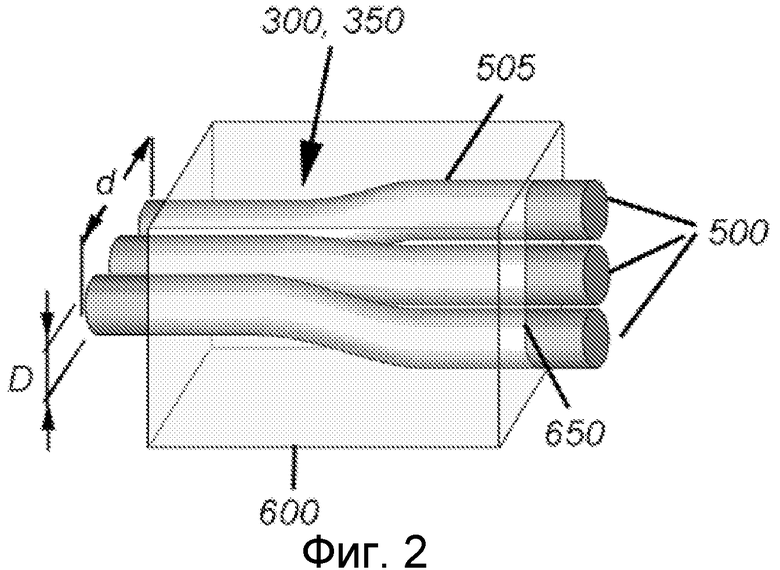
Фиг. 2 - вид в изометрии одного из вариантов осуществления одного модуля изменения ориентации тяговых тросов щипцов;
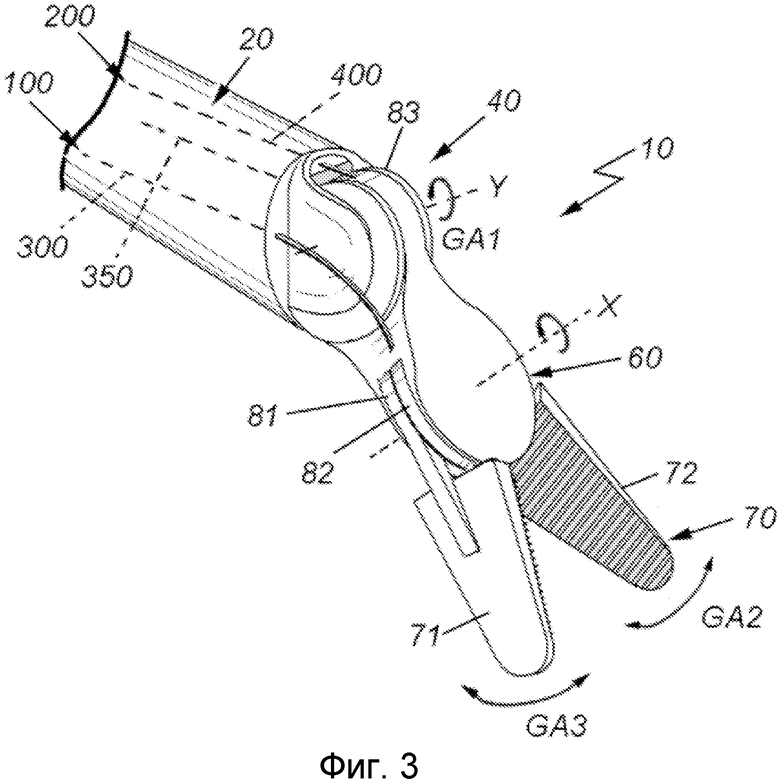
Фиг. 3 - частичный вид в изометрии минимально инвазивных лапароскопических хирургических щипцов, соответствующих настоящему изобретения, с зажимающим средством и вращающимся корпусом, установленными на конце в основном корпусе сборочного узла.
Подробное описание предпочтительного варианта осуществления
На прилагаемых фиг. 1-4 показан предпочтительный вариант осуществления минимально инвазивных лапароскопических хирургических щипцов в роботизированных руках. Щипцы целиком на чертежах указаны ссылочной позицией 10.
В показанном примере варианта осуществления щипцы 10 содержат основной корпус 20 удлиненной формы, имеющий проксимальный конец 30 (левая сторона на чертежах) и дистальный конец 40 (правая сторона на чертежах). Основной корпус 20 щипцов 10 с его проксимальным концом 30 частично показан на фиг. 1. Дистальный конец 40 основного корпуса 20 показан на фиг. 3 и 4.
Как показано на фиг. 1, проксимальный конец 30 корпуса 20 щипцов 10 может присоединяться к роботизированной руке 50 через универсальный шарнир 55. Для ясности, универсальный шарнир 55 показан на упомянутом фиг. 1 отделенным от основного корпуса 20. Универсальный шарнир 55 позволяет сборочному узлу выполнять два пассивных вращения GP1, GP2, как показано на фиг. 1 соответствующими стрелками. На дистальном конце 40 корпуса 20 присоединяется кинематический сборочный узел, содержащий корпус 60, шарнирно установленный на дистальном конце 40. Вращающийся корпус 60 снабжен зажимающим средством (зажим 70), которое далее будет описано более подробно.
Зажим 70 варианта осуществления, показанный для примера на фиг. 3 и 4, содержит два пальца 71, 72 в форме ложки. В варианте осуществления, показанном на фиг. 3, пальцы 71, 72 зажима 70 имеют плоскую, шероховатую внутреннюю поверхность. В варианте осуществления, показанном на фиг. 4, пальцы 71, 72 зажима 70 имеют изогнутую, гладкую внутреннюю поверхность. Следует понимать, однако, что пальцы 71, 72 зажима 70 могут иметь любую другую конфигурацию, так же как внутренняя поверхность по мере необходимости может иметь различную обработку поверхности.
Пальцы 71, 72 зажима 70 могут приводиться в движение путем вращения координированным и независимым способом в соответствии с активными вращательными движениями GA2, GA3, показанными на фиг. 3, вокруг первой оси X для движения в направлении друг друга и/или обратно. Это позволяет щипцам 10 захватывать и даже удерживать любой полезный инструмент, корпус или устройство (не показаны).
Кинематический сборочный узел щипцов 10 может также вращаться вокруг продольной оси Z основного корпуса 20 в соответствии с пассивным угловым движением GA4, показанным на фиг. 1. Это пассивное вращение GA4 выполняется на угол более 360° и позволяет позиционировать рабочую поверхность щипцов 10.
Каждый палец 71, 72 зажима 70 является неотъемлемой частью наматывающего барабана 81, 82, соответственно, который далее будет дополнительно описан подробно.
На проксимальном конце 30 основного корпуса 20 обеспечиваются средства М привода для управляемого привода зажима 70 и его ориентации в пространстве. Средства М привода дополнительно будут описаны ниже более подробно.
В совокупности со средствами М привода первое средство 100 передачи движения обеспечивается для того, чтобы заставить пальцы 71, 72 зажима 70 поворачиваться в направлении друг друга и друг от друга, как показано на фиг. 3 стрелками GA2 и GA3 для каждого из пальцев 71, 72, соответственно. Второе средство 200 передачи движения также обеспечивается для того, чтобы заставить вращающийся корпус 60 поворачиваться по стрелке GA1 вокруг второй оси Y, как показано на фиг. 3, для расположения щипцов 10 боком в пространстве при их использовании во время лапароскопического вмешательства. В одном варианте осуществления предпочтительно первая ось X и вторая ось Y образуют угол 90° друг относительно друга.
Первое средство 100 передачи содержит тяговые тросы 300, 350 и второе средство передачи содержат один тяговый трос 400, соответственно. Тяговый трос 350 располагается симметрично относительно тягового троса 300 и поэтому он не виден на фиг. 3 (показан пунктирной линией). Ясно, что в других вариантах осуществления изобретения щипцы 70 могут содержать один палец подвижный, другой палец - неподвижный, так что первое средство 100 передачи может в этом случае содержать один тяговый трос (300 или 350).
Все тяговые тросы 300, 350, 400 проходят вдоль основного корпуса 20 от проксимального конца 30 к дистальному концу 40, как можно видеть на фиг. 3 и 4. Тяговые тросы 300, 350, 400 выполнены с возможностью движения по длине внутри основного корпуса 20, чтобы приводить в движение щипцы 10, как подробно будет описано ниже.
В варианте осуществления, показанном для примера, каждый из тяговых тросов 300, 350, 400 средств 100, 200 передачи образуется тремя стальными тросами 500, имеющими круговое поперечное сечение, выполненными с возможностью укладки их внутри оболочки, которая их покрывает (не показана), обеспечивая необходимую жесткость для работы как на растяжение, так и на сжатие.
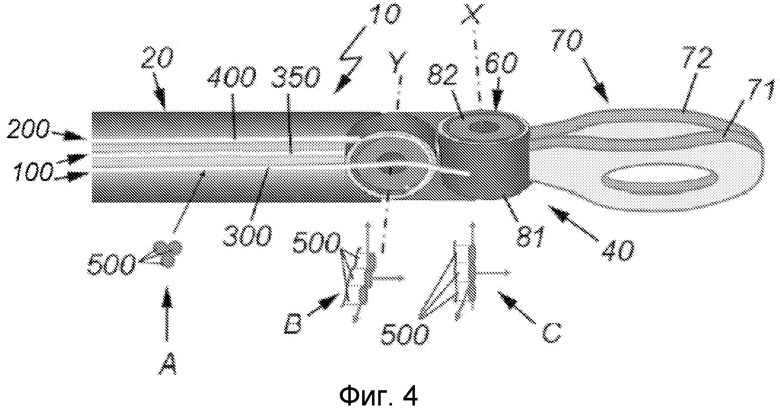
Несколько компоновок тросов 500 в одном тяговом тросе 300, 350, 400 показаны на фиг 2 и 4. На фиг. 4 показаны различные геометрические компоновки A, B, C поперечного сечения, полученные по меньшей мере для тяговых тросов 300, 350, связанных с первым средством 100 передачи. Это изменение геометрии поперечного сечения тросов 300, 350 определяется компоновкой или ориентацией тросов 500, образующих каждый тяговый трос. В показанном варианте осуществления компоновка тросов 500 в тяговых тросах 300, 350 такова, что вблизи дистального конца 40 основного корпуса 20, тяговые тросы имеют свою геометрию поперечного сечения, изменяющуюся по мере продвижения вперед по длине в направлении дистального конца 40 основного корпуса 20 щипцов 10. Это изменение геометрии поперечного сечения тягового троса 300, 350 позволяет вращательное движение GA2, GA3 пальцев 71, 72 зажима 70 вокруг оси X в обоих направлениях и позволяет тяговым тросам 300, 350, связанным с первым средством 100 движения, проходить через соединение вращающегося корпуса 60, как будет описано ниже.
Изменение геометрии поперечного сечения каждого тягового троса 300, 400 будет описано ниже со ссылкой на фиг. 4. Геометрия поперечного сечения каждого тягового троса 300, 350 изменяется дважды на его пути и, таким образом, существует первая геометрическая компоновка А поперечного сечения тягового троса 300, 350, вторая геометрическая компоновка В поперечного сечения тягового троса 300, 350 и третья геометрическая компоновка C поперечного сечения тягового троса 300, 350. Компоновки A, B и C схематично показаны на фиг. 4. В соответствии с фиг. 4, на большей части длины основного корпуса 20 тяговые тросы 300, 350 проходят с их соответствующими тросами 500, расположенными радиально от проксимального конца 30 к дистальному концу 40. Это радиальное расположение кабелей 500 достигается, по существу, их треугольным расположением, как видно в поперечном сечении, определяя, по существу, круглую форму для первой геометрической компоновки А поперечного сечения тягового троса 300, 350. Вблизи дистального конца 40 основного корпуса 20 геометрия поперечного сечения того же самого тягового троса 300, 350 изменяется с первой компоновки тросов 500 (радиальной), при которой их продольные оси расположены в форме треугольника, на вторую компоновку B, в которой их продольные оси, выровненные в первой ориентации, горизонтально выровнены, как видно на поперечном сечении, таком как показано на фиг. 4. Наконец, геометрия поперечного сечения тягового троса 300, 350 изменяется снова от этой второй компоновки B тросов 500 (в первой ориентации, с горизонтально выровненными продольными осями) на компоновку, в которой упомянутые продольные оси выровнены во второй ориентации, определяя, таким образом, третью геометрическую компоновку C поперечного сечения тягового троса 300, 350, как показано на фиг. 4. Для раскрытого варианта осуществления первая ориентация во второй компоновке B поперечного сечения тягового троса 300, 350 образует угол, по существу, 90° со второй ориентацией третьей компоновки C поперечного сечения тягового троса 300, 350. Поэтому третья компоновка C поперечного сечения тягового троса 300, 350 соответствует той, при которой его тросы 500 располагаются вертикально выровненными, как видно в поперечном сечении, показанном на фиг. 4.
Поперечное сечение тяговых тросов 300, 350 щипцов 10 обеспечивает жесткость, необходимую для работы на растяжение и на сжатие, и одновременно позволяет тяговым тросам накручиваться вокруг каждого барабана 81, 82, 83 соответственно. Изменение в ориентации по меньшей мере тяговых тросов 300, 350 в первом средстве 100 передачи (не обязательно для тягового троса 400, связанного со вторым средством 200 передачи в показанном варианте осуществления) дополнительно позволяет тяговым тросам 300 проходить через соединение 350, связанное с осью Y, чтобы приспосабливаться, то есть, чтобы позволить вращение корпуса 60 в соответствии с направлением вращения GA1.
Как упомянуто выше, первое и второе средства 100, 200 передачи движения, образованные тяговыми тросами 300, 350, 400, дополнительно содержат вращающиеся барабаны 81, 82, 83, вокруг которых накручиваются упомянутые выше соответствующие тяговые тросы 300, 350, 400. В частности, барабаны 81, 82 располагаются коаксиально один над другим, образуя вращающийся корпус 60 щипцов 10, и они выполнены с возможностью приведения во вращательное движение независимо под действием первого средства 100 передачи, то есть тяговым тросом 300 и тяговым тросом 350 (симметричным ему, не виден), соответственно. Тяговый трос 300, проходящий вдоль внутренней части основного корпуса 20, наматывается на периферию барабана 81, тогда как тяговый трос 350, проходящий вдоль внутренней части основного корпуса 20, наматывается на периферию барабана 82. Наконец, тяговый трос 400, также проходящий вдоль внутренней части основного корпуса 20, наматывается на периферию барабана 83. Смещение тяговых тросов 300, 350, связанных с первым средством 100 передачи, вызывает соответствующее независимое вращение соответствующих барабанов 81, 82 вращающегося корпуса 60 щипцов 10, заставляя пальцы 71, 27 зажима 70 поворачиваться независимо вокруг оси X в соответствии с соответствующими активными вращательными перемещениями GA2, GA3, показанными на фиг. 3, вращаясь вокруг оси X в направлении друг друга или друг от друга, как требуется, чтобы захватывать, удерживать и т.д. инструменты, органы и т.д. Перемещение тягового троса 400, связанного со вторым средством 200 передачи, заставляет барабан 83, образующий вращающийся корпус 60 щипцов 10, вращаться вокруг оси Y в соответствии с активным движением GA1, показанным на фиг. 3, для должного позиционирования щипцов 10 в пространстве.
Для необходимого вращательного движения барабанов 81, 82, 83 они снабжаются желобчатой периферией (не показана), пригодной для наматывания соответствующих тяговых тросов 300, 350, 400. Каждый наматывающий барабан 81, 82, определяющий вращающийся корпус 60, неразъемно соединен с каждым соответствующим пальцем 71, 72 зажима 70.
В варианте осуществления минимально инвазивных лапароскопических хирургических щипцов 10, который описывается здесь со ссылкой на чертежи, дополнительно обеспечивается узел 600 изменения ориентации тяговых тросов 300, 350. Один из примеров одного из этих узлов 600 изменения ориентации показан на фиг. 2. На упомянутой фиг. 2 показан узел 600 изменения ориентации тяговых тросов 300, 350, предназначенный для изменения геометрических компоновок A, B, C поперечного сечения каждого тягового троса 300, 350 в упомянутой первом средстве 100 передачи в различных плоскостях вблизи дистального конца 40 основного корпуса 20 щипцов 10. Узел 600 изменения ориентации содержит интегрированный блок, закрепленный внутри основного корпуса 20. Внутри узла 600 изменения ориентации обеспечивается удлиненный внутренний канал 650, имеющий форму, предназначенную для направления тросов 500 каждого тягового троса 300, 350 и принудительного вращения приблизительно на 90° по мере их прохождения через внутреннюю часть канала 650. Для каждого тягового троса 300, 350 первого средства 100 передачи обеспечиваются два узла 600 изменения ориентации. Узлы 600, связанные с упомянутым первым средством 100 передачи движения, то есть те узлы, которые вызывают изменение ориентации тяговых тросов 300 и 350 при движении вдоль длины по основному корпусу 20, располагаются один - на дистальном конце 40 основного корпуса 20, и другой - вблизи одного из соответствующих барабанов 81, 82 вращающегося корпуса 60.
Описанная конфигурация узлов 600 изменения ориентации позволяет производить два изменения в компоновке поперечного сечения тяговых тросов, от круговой А на прямую горизонтальную B и от прямой горизонтальной B окончательно к прямой вертикали C, так схематично показано на фиг. 4 и как описано выше. Внутренний канал 650 каждого узла 600 изменения ориентации может иметь первый размер d, соответствующий диаметру используемого троса (обычно 0,3 мм), и второй размер D, соответствующий трем упомянутым диаметрам (0,9 мм). Должно быть понятно, что упомянутые размеры d, D в конкретной ориентации могут соответствовать ширине и высоте упомянутого канала 650 в показанном примере, хотя геометрия узла 600 может определяться другими размерами.
Между двумя узлами 600 изменения ориентации в одном и том же тяговом тросе 300, 350, тросы 500 помещаются внутри плоской оболочки, пригодной для поддержания их конфигурации на этом пути между двумя узлами 600.
Возвращаясь теперь к фиг. 1, средства М привода тяговых тросов 300, 350, 400 описываются ниже более подробно.
В варианте осуществления, показанном посредством примера, средства М привода содержат несколько электродвигателей 700, выполненных с возможностью привода во вращение внешних трубок 800. Эти внешние трубки 800 снабжены внутренней резьбой и они удерживаются в направлении вдоль оси на проксимальном конце 30 внутри основного корпуса 20, как показано на фиг. 1. Внутрь внешних трубок 800 входят соответствующие внутренние трубки, имеющие наружную резьбу 850 и присоединенные к внешней части соответствующих тяговых тросов 300, 350, 400. Внутренние трубки 850 могут вращаться относительно соответствующих внешних трубок 800, которые, как замечено выше, удерживаются в направлении вдоль оси внутри основного корпуса 20. Таким образом, вращение каждой внешней трубки 800 соответствующим двигателем 700 приводит в результате к продольному движению внутренней трубки 850 и, следовательно, к соответствующему продольному движению тягового троса 300, 350 первого средства 100 передачи для приведения в движение пальцев 71, 72 зажима 70 щипцов 10 вокруг оси X (независимые перемещения GA2, GA3) и/или второго средства 200 передачи для приведения во вращение подвижного корпуса 60 для позиционирования зажима 70 вокруг оси Y (движение GA1).
Хотя настоящее изобретение было представлено в описании и проиллюстрировано сопроводительными чертежами со ссылкой на его предпочтительный вариант осуществления, минимально инвазивные лапароскопические хирургические щипцы, соответствующие изобретению, допускают различные изменения, не отступая от объема защиты, определенного в приложенной формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2018 |
|
RU2772044C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| ХИРУРГИЧЕСКАЯ СИСТЕМА С СЕНСОРНЫМ ВОСПРИЯТИЕМ ДЛЯ РОБОТИЗИРОВАННОЙ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2835514C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С МНОГОКРАТНО ИСПОЛЬЗУЕМОЙ РУКОЯТКОЙ | 2011 |
|
RU2557912C2 |
| ЭРГОНОМИЧНЫЙ ЦИРКУЛЯРНЫЙ ХИРУРГИЧЕСКИЙ СТЕПЛЕР | 2010 |
|
RU2525014C2 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| УНИВЕРСАЛЬНАЯ УСТАНОВКА ДЛЯ СУХОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА ПРИ НЕЙРО-ВЕРТЕБРАЛЬНОЙ ПАТОЛОГИИ | 2010 |
|
RU2440806C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2440043C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ МИНИМАЛЬНО ИНВАЗИВНЫХ ОПЕРАЦИЙ НА СЕРДЦЕ | 1997 |
|
RU2233626C2 |
Изобретение относится к медицине. Минимально инвазивные лапароскопические хирургические щипцы содержат зажимающее средство, установленное на вращающемся корпусе, первое и второе средства передачи движения зажимающего средства и вращающийся корпус, соответственно, содержащие, по меньшей мере один тяговый трос, состоящий из нескольких тросов, располагающихся так, что поперечное сечение по меньшей мере одного тягового троса, связанного с первым средством передачи движения, имеет изменяемую геометрию вдоль его пути прохода. В первой компоновке тросы в поперечном сечении располагаются так, что их продольные оси размещаются радиально. Во второй компоновке оси ориентированы в первом направлении. В третьей компоновке оси ориентированы во втором направлении, перпендикулярном первому направлению. 8 з.п. ф-лы, 4 ил.
1. Минимально инвазивные лапароскопические хирургические щипцы (10), содержащие зажимающее средство (70), установленное на вращающемся корпусе (60), первое средство (100) передачи движения зажимающего средства (70) и второе средство (200) передачи движения вращающегося корпуса (60), причем упомянутые первое и второе средства (100, 200) передачи соответственно содержат по меньшей мере один тяговый трос (300, 350, 400), каждый из которых образован несколькими тросами (500), которые располагаются так, что поперечное сечение по меньшей мере одного тягового троса (300, 350), связанного с первым средством (100) передачи движения, имеет изменяемую геометрию (А, В, С) вдоль его пути прохода через внутреннюю часть основного корпуса (20), при этом щипцы дополнительно содержат узлы (600) изменения ориентации тросов (500) тягового троса (300, 350), причем каждый узел (600) имеет удлиненный канал (605), форма которого позволяет направлять упомянутые тросы (500) соответствующего тягового троса, вызывая поворот его ориентации; и при этом геометрия поперечного сечения каждого тягового троса (300, 350) имеет первую компоновку (А), в которой соответствующие тросы (500) располагаются так, что в поперечном сечении их продольные оси имеют радиальную компоновку (А), вторую компоновку (В), в которой соответствующие тросы (500) каждого тягового троса (300, 350) расположены так, что в поперечном сечении их продольные оси располагаются в первой ориентации, и третью компоновку (С), в которой соответствующие тросы (500) каждого тягового троса (300, 350) расположены так, что в поперечном сечении их продольные оси располагаются во второй ориентации, отличной от первой ориентации.
2. Щипцы (10) по п.1, в которых упомянутые первая и вторая ориентации второй и третьей компоновок (В, С), соответственно, образуют друг с другом угол, по существу, равный 90°.
3. Щипцы (10) по любому из предшествующих пунктов, в которых по меньшей мере один из упомянутых тяговых тросов (300, 350, 450) образуется по меньшей мере тремя тросами (500).
4. Щипцы (10) по любому из пп.1 и 2, в которых зажимающее средство (70) выполнено с возможностью вращения вокруг первой оси (X).
5. Щипцы (10) по любому из пп.1 и 2, в которых упомянутый вращающийся корпус (60) выполнен с возможностью вращения вокруг второй оси (Y).
6. Щипцы (10) по любому из пп.1 и 2, в которых зажимающее средство выполнено с возможностью вращения вокруг первой оси, при этом вращающийся корпус выполнен с возможностью вращения вокруг второй оси, причем упомянутые первая и вторая оси образуют друг с другом угол, по существу, равный 90°.
7. Щипцы (10) по любому из пп.1 и 2, в которых упомянутый вращающийся корпус (60) содержит вращающиеся барабаны (81, 82), соответственно связанные с упомянутым зажимающим средством (70).
8. Щипцы (10) по п.7, в которых упомянутые вращающиеся барабаны (81, 82) выполнены с возможностью действия независимо, каждый посредством соответствующего тягового троса (300, 350) упомянутого первого средства (100) передачи.
9. Щипцы (10) по пп.1 и 2, дополнительно содержащие по меньшей мере одну оболочку, заключающую внутри тяговые тросы (300, 350, 450).
| Колосоуборка | 1923 |
|
SU2009A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |
| US 4880015 A, 14.11.1989 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6969385 B2, 29.11.2005 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |

