Изобретение относится к измерительной технике и может быть использовано для обеспечения взаимозаменяемости пьезоэлектрических вибропреобразователей ускорения (вибродатчиков ускорения), входящих в состав акселерометров или измерительных систем, без дополнительной настройки электронных согласующих элементов акселерометра или измерительных систем.
Одним из важнейших параметров акселерометра, определяющим его метрологические возможности, является коэффициент преобразования (Иориш Ю.И. Виброметрия. ГНТИ «Машиностроительной литературы». М.: 1963; ГОСТ Р 8.669-2009), который зависит от коэффициента преобразования вибродатчика ускорения и параметров согласующего и усилительного тракта акселерометра.
В технических условиях на вибродатчики ускорения нормируются номинальное значение коэффициента преобразования и пределы отклонения действительного значения коэффициента преобразования от номинального значения.
При изготовлении вибродатчиков ускорения из-за
- трудности учета вклада в суммарное преобразование действующего разброса параметров пьезокерамики;
- разной массы изготовленных в пределах установленного допуска однотипных деталей;
- реакции элементов пьезопреобразователя с распределенными параметрами на виброускорение
у каждого чувствительного элемента вибродатчика ускорения наблюдается отклонение различной величины действительного значения коэффициента преобразования от его номинального значения, установленного техническими условиями.
Так, например, фирма «Брюль и Къер», Дания, устанавливает отклонение не более 2% («Электронная аппаратура», «Брюль и Къер», Каталог 1989/90 г., например, вибродатчики ускорения типа 4375, 4384, 4382), а фирма «ГлобалТест», Россия, - от 5 до 20% («Виброизмерительная аппаратура. Измерения. Удар. Вибрация», ООО «ГлобалТест», г.Саров, Нижегородская обл., например, вибродатчики ускорения типа АР38, АР62, АР49).
Чем меньше отклонение действительного значения коэффициента преобразования от номинального значения, тем проще и дешевле осуществляется замена однотипных вибродатчиков ускорения. При малых отклонениях (1-2%) не требуется регулировка (или она незначительна) последующего канала обработки информации с выхода вибродатчика ускорения.
Особенно это важно для вибродиагностических измерительных систем, в которых применяется большое количество вибродатчиков ускорения, а обработка информации осуществляется одним измерительным устройством (см., например, «Vibration monitoring system for an aircraft engine», US 4213114, G01H 1/00, G08B 21/00, 15-07-1980).
При больших отклонениях (5-10%) без дополнительной регулировки погрешность измерений значительно возрастает. Для уменьшения погрешности в таких случаях требуется проведение дополнительной процедуры определения действительного значения коэффициента преобразования нового заменяющего вибродатчика ускорения и регулировка последующего канала обработки информации с выхода этого вибродатчика ускорения (например, проводят сравнение реальных параметров датчика ускорения с теоретическими, которые хранятся в памяти вычислительного комплекса, и корректировку коэффициента преобразования, см., например, «Способ измерения механических величин», SU 2210744, G01C 25/00, G01P 21/00, 27.12.2001).
При изготовлении современных типов вибродатчиков ускорений действительные значения их коэффициентов преобразования в заданных пределах могут выдерживаться за счет высокой точности изготовления отдельных деталей и применения пьезокерамики, параметры которой имеют незначительный разброс в пределах допуска, либо могут регулироваться за счет изменения степени усиления выходного сигнала согласующего усилителя, который может быть как отдельным элементом акселерометра, так и встроенным элементом вибродатчика ускорения (см., например, «Пьезоэлектрический измерительный преобразователь», RU 2400867 G01P 15/09, 2010.09.27).
Известна регулировка действительного значения коэффициента преобразования пьезоэлектрического акселерометра, осуществляемая с помощью изменения коэффициента передачи предварительного усилителя вибродатчика ускорения или с помощью электронной части измерительной системы.
Так, например, в известном пьезоэлектрическом датчике вибрации - «Excitation circuit for piezo-electric vibration type angular velocity sensor» JPH 1151657, G01P 9/04, H03B 5/32, 1999-02-26, коэффициент преобразования регулируется за счет изменения коэффициента усиления предварительного усилителя.
Известен также способ регулировки действительного значения коэффициента преобразования пьезоэлектрического акселерометра (см. «Способ калибровки виброизмерительного тракта», SU 1820337, G01P 21/00, 1991.02.27), который является наиболее близким аналогом заявляемого способа.
Согласно известному способу в чувствительном элементе вибродатчика ускорения возбуждают калиброванные механические колебания, генерируемый электрический сигнал с вибродатчика ускорения для регулировки подают на согласующий (предварительный) усилитель, далее сигнал детектируют, измеряют его уровень и подают на вычислитель.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится необходимость регулировки коэффициента преобразования предварительного усилителя в случае выхода из строя вибродатчика ускорения, входящего в состав акселерометра или измерительной системы, поскольку действительное значение коэффициента преобразования нового вибродатчика ускорения может существенно отличаться от вышедшего из строя.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение взаимозаменяемости пьезоэлектрических вибродатчиков ускорения, входящих в состав акселерометров или измерительных систем, без дополнительной настройки электронных согласующих элементов акселерометра или его измерительных систем.
Технический результат, получаемый при осуществлении заявляемого изобретения, заключается в обеспечении возможности регулировки суммарной реакции на ускорение всех деталей чувствительного элемента вибродатчика ускорения.
Указанный технический результат при осуществлении изобретения достигается тем, что по заявляемому способу регулировки действительного значения коэффициента преобразования пьезоэлектрического акселерометра, использующему возбуждение в чувствительном элементе его вибродатчика ускорения калиброванных механических колебаний, измерение действительного значения коэффициента преобразования и его регулировку, в отличие от известного способа измеряют начальное действительное значение коэффициента преобразования, затем к инерционному телу чувствительного элемента вибродатчика, как к основному, прикрепляют дополнительные инерционные тела с различной известной массой и измеряют текущие измененные действительные значения коэффициента преобразования с каждым из дополнительных инерционных тел, по результатам измерений устанавливают зависимость действительного значения коэффициента преобразования от массы дополнительного инерционного тела, по установленной зависимости определяют значение массы такого дополнительного инерционного тела, которое соответствует реализации регулируемого действительного значения коэффициента преобразования, превышающего его начальное значение и соответствующего выбранному номинальному значению, и к основному инерционному телу чувствительного элемента вибродатчика ускорения прикрепляют на постоянной основе дополнительное инерционное тело с массой, соответствующей выбранному номинальному значению коэффициента преобразования пьезоэлектрического акселерометра.
На фигуре изображен график зависимости действительного значения коэффициента преобразования вибродатчика от значения массы дополнительного инерционного тела.
Заявляемый способ теоретически обосновывается следующим образом. Известно (Иориш Ю.И. Виброметрия. ГНТИ «Машиностроительной литературы». М.: 1963 - 518 с.), что коэффициент преобразования вибродатчика ускорения в плоской части его амплитудно-частотной характеристики kмВ определяется выражением:

где µП - коэффициент электромеханического преобразования;
ωур - значение круговой частоты установочного резонанса (первая резонансная частота закрепленного вибродатчика ускорения), которая определяется выражением

где 
m - инерционная масса вибродатчика ускорения;
l, S - высота и площадь пьезопластины (или комплекта пьезопластин). С учетом (2) выражение (1) можно записать в виде:

Таким образом, коэффициент преобразования КП (kмВ) чувствительного элемента вибродатчика ускорения прямо пропорционален массе m инерционного тела, т.е. имеет линейную зависимость.
Заявляемый способ регулировки действительного значения коэффициента преобразования пьезоэлектрического акселерометра осуществляют следующим образом.
Изготовленный вибродатчик с чувствительным элементом устанавливают на вибростенд рабочего эталона, подключают к измерительному тракту акселерометра, возбуждают в чувствительном элементе калиброванные механические колебания с известными частотой и амплитудой и измеряют начальное действительное значение коэффициента преобразования КПН акселерометра.
Затем к инерционному телу чувствительного элемента вибродатчика ускорения, как к основному, последовательно прикрепляют дополнительные инерционные тела mД с различной, предпочтительно увеличивающейся, известной массой mД1-n и измеряют текущие измененные действительные значения коэффициента преобразования КП1-n с каждым из дополнительных инерционных тел.
По результатам измерений устанавливают зависимость действительного значения коэффициента преобразования КП от массы дополнительного инерционного тела mД и строят изображенный на фиг. график линейной зависимости действительного значения коэффициента преобразования КП вибродатчика от значения массы дополнительного инерционного тела mД.
По установленной зависимости на графике (см. фиг.) определяют значение массы такого дополнительного инерционного тела mДВ, которое соответствует реализации регулируемого действительного значения коэффициента преобразования КПВ, превышающего его начальное значение КПН и соответствующего номинальному значению.
К основному инерционному телу чувствительного элемента пьезоэлектрического вибродатчика ускорения прикрепляют на постоянной основе изготовленное или из числа имеющихся дополнительное инерционное тело с массой mДВ, соответствующей выбранному номинальному значению коэффициента преобразования КПВ пьезоэлектрического акселерометра.
Таким образом, видно, что приведенные выше сведения подтверждают возможность осуществления изобретения, достижения указанного технического результата и решения поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический акселерометр | 2016 |
|
RU2627571C1 |
| Комплекс устройств для измерения параметров механических колебаний объектов с компенсацией температурной погрешности | 2023 |
|
RU2813636C1 |
| Самокалибрующийся акселерометр | 1973 |
|
SU478252A1 |
| АКСЕЛЕРОМЕТР | 2009 |
|
RU2421736C1 |
| Способ определения работоспособности преобразователя пространственной вибрации на работающем объекте | 2021 |
|
RU2775572C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЯ ЧАСТОТЫ УСТАНОВОЧНОГО РЕЗОНАНСА ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2593646C1 |
| Акселерометр, работающий на деформации сдвига в пьезоэлементе, и способ его изготовления | 2023 |
|
RU2814852C1 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2024 |
|
RU2837037C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УДАРНОГО УСКОРЕНИЯ | 2012 |
|
RU2495438C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЙ, ВОЗНИКАЮЩИХ В ЭЛЕКТРОУСТАНОВКАХ | 2023 |
|
RU2829713C1 |
Изобретение относится к измерительной технике и может быть использовано для обеспечения взаимозаменяемости пьезоэлектрических вибропреобразователей ускорения (вибродатчиков ускорения), входящих в состав акселерометров или измерительных систем, без дополнительной настройки электронных согласующих элементов акселерометра или измерительных систем. Согласно способу определяют начальное действительное значение коэффициента преобразования акселерометра. Дополнительно увеличивая массу основного инерционного тела вибродатчика ускорения, определяют зависимость действительного значения коэффициента преобразования от дополнительной массы инерционного тела. По известной зависимости определяют значение дополнительной массы, при которой регулируемое действительное значение коэффициента преобразования акселерометра будет соответствовать выбранному номинальному значению. К основному инерционному телу чувствительного элемента вибродатчика прикрепляют на постоянной основе дополнительное инерционное тело с массой, соответствующей выбранному номинальному значению коэффициента преобразования. Технический результат - обеспечение возможности регулировки суммарной реакции на ускорение всех деталей чувствительного элемента вибродатчика ускорения. 1 ил.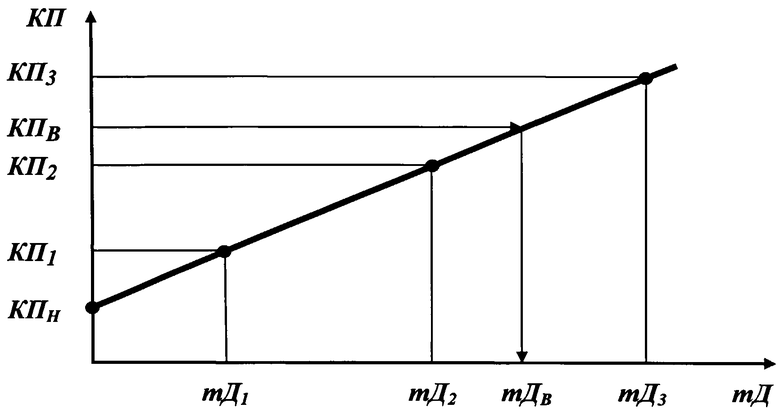
Способ регулировки действительного значения коэффициента преобразования пьезоэлектрического акселерометра, использующий возбуждение в чувствительном элементе его вибродатчика ускорения калиброванных механических колебаний, измерение действительного значения коэффициента преобразования и его регулировку, отличающийся тем, что измеряют начальное действительное значение коэффициента преобразования, затем к инерционному телу чувствительного элемента вибродатчика, как к основному, прикрепляют дополнительные инерционные тела с различной известной массой и измеряют текущие измененные действительные значения коэффициента преобразования с каждым из дополнительных инерционных тел, по результатам измерений устанавливают зависимость действительного значения коэффициента преобразования от массы дополнительного инерционного тела, по установленной зависимости определяют значение массы такого дополнительного инерционного тела, которое соответствует реализации регулируемого действительного значения коэффициента преобразования, превышающего его начальное значение и соответствующего выбранному номинальному значению, и к основному инерционному телу чувствительного элемента вибродатчика ускорения прикрепляют на постоянной основе дополнительное инерционное тело с массой, соответствующей выбранному номинальному значению коэффициента преобразования пьезоэлектрического акселерометра.
| СПОСОБ ДИСТАНЦИОННОГО ПЕРИОДИЧЕСКОГО КОНТРОЛЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА | 2000 |
|
RU2176396C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| WO 1994014076 A1, 23.06.1994 | |||

