Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционных средств обнаружения (CO), построенных на радиоволновом или инфракрасном принципах обнаружения, для сигнализационного прикрытия двухсторонней развилки дороги [1].
Часто маршрут движения нарушителя проходит по имеющейся дорожной сети на местности. Во многом успех задержания нарушителя зависит от знания силами реагирования направления его движения. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание.
Одним из наиболее часто встречающихся элементов дорожной сети является двухсторонняя развилка дорог. Угол разветвления дорог на ней меньше 180 градусов, что отличает ее от Т-образного перекрестка дорог. В то же время, топология Т-образного перекрестка дорог и двухсторонней развилки дорог одинаковая и через них обоих возможно движение в шести направлениях: AB, BA, BC, CB, AC, CA (фиг. 1, 2).
На практике для сигнализационного прикрытия участков дорожной сети широко применяются однопозиционные CO, построенные на радиоволновом или инфракрасном принципах обнаружения, характеризующихся незначительной протяженностью зоны обнаружения (25-50 метров). Достоинством этих средств являются возможность мало затратного и оперативного развертывания, а также скрытного расположения. В то же время, работа радиолучевых (инфракрасных) средств обнаружения (РЛ и ИК СО) возможна только при выполнении условия отсутствия препятствий на пути распространения радио (инфракрасных) волн [1]. Такими препятствиями могут быть, например, деревья, кустарник, высокая трава. Поэтому РЛ и ИК СО должны применяться или на отрытом участке местности, или после очистки участка от растительности (после работ по подготовке местности).
В то же время, в большинстве случаев для своего движения нарушитель выбирает дороги, находящиеся на закрытых участках местности (покрытых деревьями, кустарником, высокой травой), поэтому при развертывании РЛ и ИК СО на такой местности всегда требуется выполнение дополнительных работ по подготовке местности.
Прототипом предлагаемого способа является способ определения направления движения нарушителя на Т-образном перекрестке дорог, заключающийся в развертывании двух СО таким образом, чтобы каждое из них прикрывало сразу две дороги и расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней протяженной зоны обнаружения (ЗО), были одинаковы для всех направлений, короткое и длинное расстояния между рядом лежащими местами пересечения зон обнаружения с дорогами соотносятся как 1:7, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от средства обнаружения при появлении нарушителя на перекрестке, а также начало отсчета интервала времени Δt; обеспечении регистрации последующих сигналов тревоги от соответствующих средств обнаружения с продолжением отсчета интервала времени Δt; применении алгоритма, определяющего направление движения по последовательности из двух сигналов тревоги или последовательности из трех сигналов тревоги, поступивших за установленный интервал времени, и отношение между временными интервалами задержки их поступления согласно таблице соответствия направления движения нарушителя и последовательности сигналов тревоги [2].
Недостатками данного способа являются необходимость проведения подготовительных работ по очистке местности от растительности, препятствующей распространению радио (инфракрасных) волн, и связанные с этим снижение оперативности развертывания средств, задействование дополнительных сил и средств на проведение этих работ, нарушение условий, обеспечивающих скрытное применение СО на местности (демаскирование средств) (фиг. 1).
Такие работы по очистке местности от растительности, как вырубка деревьев и кустарника, выкашивание высокой травы, требуют значительных материальных и временных затрат, а получаемые после этого расчищенные от растительности участки местности демаскируют место развертывания СО на фоне оставшейся растительности. Так, например, на спиливание пня твердолиственного дерева диаметром до 40 см заподлицо с землей требуется до 0,41 чел*час, свыше 40 см - до 0,511 чел*час [3].
Целью изобретения являются: снижение временных затрат, затрат сил и средств на развертывание средств обнаружения, обеспечение скрытности применения средств обнаружения на местности.
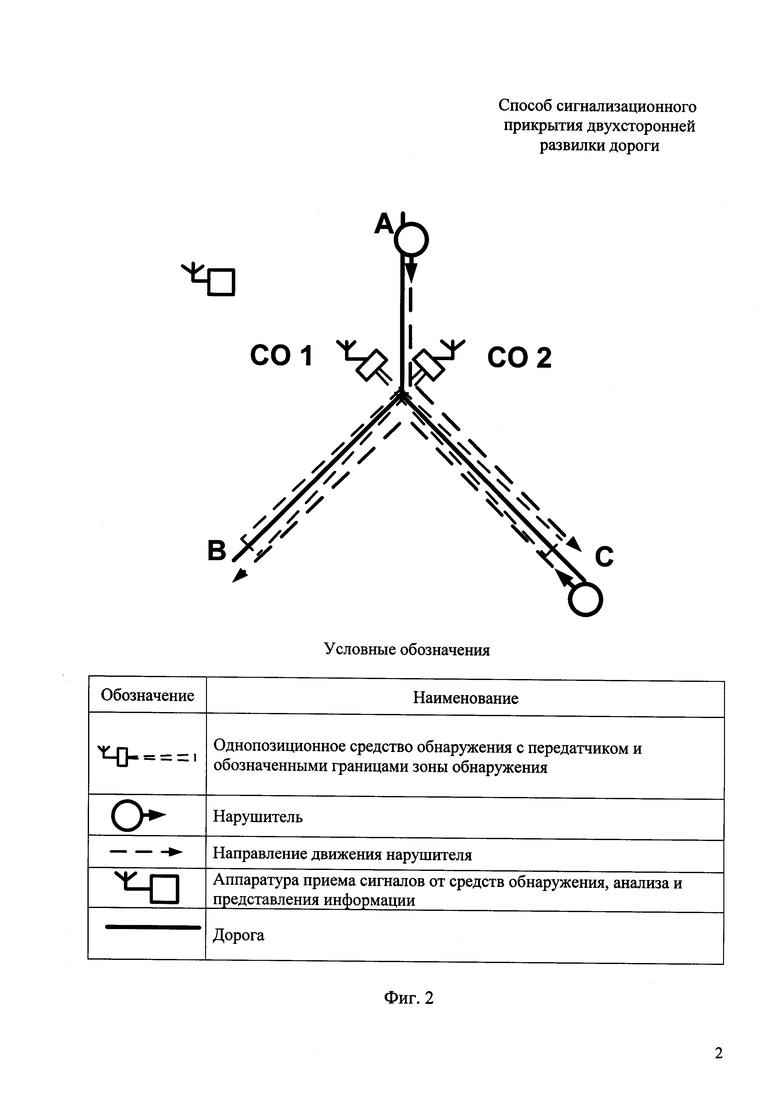
Для достижения поставленной цели разработан способ сигнализационного прикрытия двухсторонней развилки дороги, заключающийся в развертывании на развилке дороги двух однопозиционных СО таким образом, чтобы они находились с противоположных сторон от места разветвления дороги и ось зоны обнаружения (ЗО) каждого СО лежала на одной из расходящихся дорог, причем не менее 4/5 длины ЗО закрывало участок дороги, сами ЗО пересекались в месте разветвления дороги, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги (СТ) от СО при появлении нарушителя на развилке; обеспечении регистрации последующего СТ от соответствующего СО; применении алгоритма, определяющего направление движения по поступившей последовательности из двух СТ, длительности задержки между их поступлением и отношению между их длительностями (фиг. 3-5).
На самой дороге (тропе) отсутствует растительность, мешающая распространению радио (инфракрасных) волн, а ее ширина соизмерима с шириной ЗО ИК и РЛ СО (фиг. 3). Поэтому, если сориентировать ось ЗО СО вдоль участка дороги таким образом, чтобы она большей своей частью закрывала этот участок и находилась вне местности покрытой растительностью, исчезнет необходимость в проведении работ по подготовке местности к развертыванию СО.
На двухсторонней развилке дороги движение нарушителя возможно в 6 направлениях: AB, BA, BC, CB, AC, CA (фиг. 2). Определение направления движения обнаруженного нарушителя возможно по последовательности поступления двух СТ (CO1 и CO2 или СО2 и С01), отношению между длительностями этих сигналов, а также по длительности задержки между поступлениями двух СТ (фиг. 4, 5).
Теоретически, при равномерной скорости движения нарушителя через развилку дороги в направлениях ВС или СВ, длительность сигналов тревог от обоих СО будет приблизительно одинаковой, так как нарушитель пересечет их ЗО вдоль оси, пройдя практически равные расстояния (фиг. 2, 4):

где LCO1, LCO2 - длины участков зон обнаружения средств обнаружения 1 и 2, соответственно, сориентированных вдоль дорог, м.
Пеший нарушитель движется со скоростью, пределы которой зависят от состояния дороги (фиг. 6). При этом неравномерность скорости его движения, характеризуемая отношением верхнего значения скорости (VMAX) к нижнему (VMIN), лежит в пределах 1,5…2,0 [4, 5]. Для простоты расчета и увеличения устойчивости получаемого результата к возможным действиям нарушителя принимается максимальное значение неравномерности его скорости движения.

где VMAX, VMIN - максимально и минимально возможные скорости движения нарушителя через развилку дорог, м/с.
С учетом неравномерности движения нарушителя через развилку дороги отношение длительностей сигналов тревог от средств обнаружения СО1 и СО2, при пересечении нарушителем ЗО вдоль их оси (движение в направлениях ВС или СВ) будет лежать в диапазоне от 0,5 до 2:

где tLСО1, tLСО2 - длительность сигналов тревог от средств обнаружения СО1 и СО2, при пересечении нарушителем зон обнаружения вдоль их оси, сек.
Также при движении нарушителя в направлениях ВС или СВ будет зарегистрирована заметная задержка между поступлением сигналов тревоги от СО. Это связанно с тем, что в ЗО СО1(СО2) нарушитель попадет, только после того как практически пересечет всю ЗО СО2(СО1). Задержка в поступлении сигнала определяется длиной участка ЗО СО, которую пересечет нарушитель первой до входа в ЗО второго СО, и возможным диапазоном скоростей нарушителя (VMAX) и (VMIN). Для расчета минимально возможной задержки между поступлением двух СТ (наихудшие условия для определения направления движения), берется максимально возможная скорость движения пешего нарушителя:

где ΔTMIN - минимально возможная задержка между поступлением двух сигналов тревог, сек.
Численное значение этой задержки при VMAX - 2,7 м/сек (10 км/час) и длине ЗО 25 и 50 метров более 7 и 14 секунд, соответственно. При движении нарушителя со средней скоростью 1,1 м/сек (4 км/час) оба эти значения возрастают в более чем два раза (фиг. 5).
При начале движения нарушителя в направлениях AB или AC, он начинает пересечение ЗО обоих СО одновременно, поэтому задержка между поступлением сигналов тревог будет не более 1-2 секунд и связана она с техническими особенностями работы СО (фиг. 4, 5).
При движении нарушителя в направлениях BA, AB, AC, CA длительность сигнала тревоги одного из CO будет значительно больше длительности другого. Это связано с тем, что ЗО средства, длительность сигнала тревоги которого больше, нарушитель пересечет вдоль ее оси, тогда как ЗО другого средства - поперек (фиг. 2, 4). Длина ЗО РЛ и ИК СО, сориентированной вдоль дороги, лежит в пределах 20-40 метров (что составляет 4/5 от всей длины зоны), ширина ЗО на удалении 1/5 от средства не более 2-3 метров, поэтому для направлений движения CA и AC (фиг. 3):

где HCO1, HCO2 - ширина зоны обнаружения CO1 и CO2, соответственно, в месте разветвления дорог, м.
Для направлений движения BA и AB (фиг. 5):

С учетом формул 2 и 5, при условиях, когда нарушитель пересекает ЗО вдоль ее оси со скоростью в два раза меньшей, чем скорость, с которой он пересекает ЗО поперек ее оси (наихудшие условия для определения направления движения), отношение длительностей сигналов тревоги для направлений движения CA и AC будет равно:

где tНСО1, tHCO2 - длительность сигналов тревог от средств обнаружения CO1 и CO2, при пересечении нарушителем зон обнаружения поперек ее оси, сек.
Для направлений движения BA и AB:

Численное значение отношения длительности сигнала тревоги CO1 к длительности сигнала тревоги CO2 с длинной ЗО - 25 метров и направлений движения СА и АС (фиг. 4, 5):

Для направлений движения BA и AB менее 0,25 (фиг. 4, 5):

Это же отношение для CO с длинной ЗО-50 метров имеет значение для направления СА и АС не менее 8 (фиг. 4, 5):

Для направлений BA и AB менее 0,125 (фиг. 4):

Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания средств обнаружения в известном способе определения направления движения нарушителя на Т-образном перекрестке дорог;
- фиг. 2 - схема развертывания средств обнаружения на двухсторонней развилке дорог в предлагаемом способе;
- фиг. 3 - схема развертывания средств обнаружения в предлагаемом способе с указанием размеров;
- фиг. 4 - таблица признаков, указывающих на направление движения нарушителя и используемых в предлагаемом способе;
- фиг. 5 - таблица принятия решения о направлении движения нарушителя в предлагаемом способе;
- фиг. 6 - таблица диапазонов скоростей нарушителя на различных участках местности;
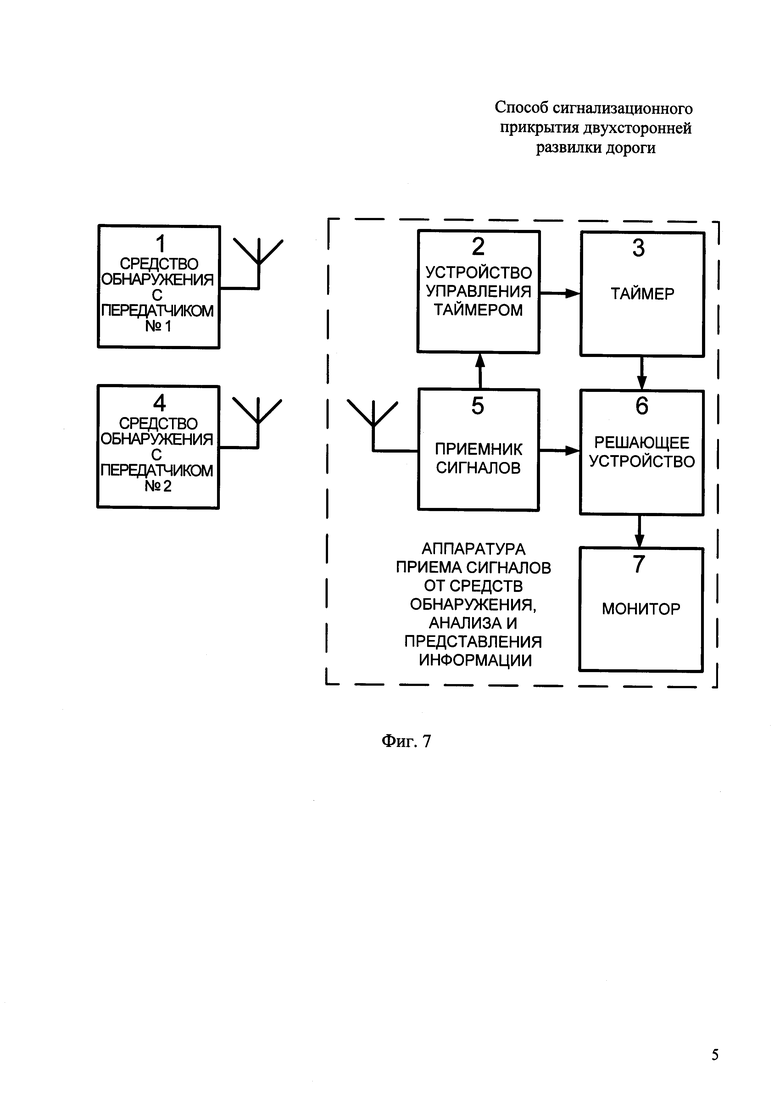
- фиг. 7 - структурная схема взаимосвязи применяемых устройств при реализации способа.
При реализации способа применяются следующие устройства: средство 1 обнаружения с передатчиком №1, устройство 2 управления таймером 3, средство 4 обнаружения с передатчиком №2, приемник 5 сигналов, решающее устройство 6, монитор 7 (фиг. 7).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание средств 1 и 4 обнаружения с передатчиком №1, №2 по установленной схеме (фиг. 3).
2. Развертывание на местности аппаратуры приема сигналов, анализа и представления информации, включающей в себя: устройство 2 управления таймером 3, таймер 3, средство 4 обнаружения с передатчиком, приемник 5 сигналов, решающее устройство 6, монитор 7 (фиг. 7).
3. Составление таблицы принятия решения о направлении движения нарушителя через двухстороннюю развилку дороги и загрузку ее в решающее устройство 6 (фиг. 5).
Основной этап начинается при движении нарушителя через развилку дороги и включает:
1. Регистрацию приемником 5 первого сигнала тревоги от одного из средств 1, или 4 обнаружения с передатчиком при пересечении нарушителем его ЗО, запуск таймера 3 устройством 2 управления таймером, начало отсчета им интервала времени и запись номера средства обнаружения в решающее устройство 6 (фиг. 7).
2. Регистрацию приемником 5 последующего сигнала тревоги от средства 4 или 1 обнаружения с передатчиком при пересечении нарушителем его ЗО, фиксирование времени задержки его поступления и продолжение отсчета интервала времени таймером 3 и запись их в решающее устройство 6 и (фиг. 7).
3. Фиксирование таймером 3 длительности сигналов тревог от средства 1 и 4 обнаружения с передатчиком при их последовательном переходе в дежурный режим.
4. Окончание отсчета интервала времени таймером 3 и регистрации приемником 5 сигналов тревоги от средств обнаружения при установлении обоих СО в дежурный режим по команде решающего устройства 6.
5. Определение решающим устройством 6 направления движения нарушителя согласно таблице принятия решения о направлении движения нарушителя (фиг. 5).
6. Выведение результата на монитор 7 (фиг. 7).
Технический результат состоит в снижении временных затрат, затрат сил и средств на развертывание средств обнаружения, обеспечении скрытности применения средств обнаружения на местности.
Источники информации
1. Магауенов, Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
2. Способ определения направления движения нарушителя на Т-образном перекрестке дорог: заявка на изобретение / С.А. Удот., Федоровцев Д.Г., Н.Л. Асташев - №2015118481; заявл. 15.05.15.
3. Типовые нормы вырубки, нормы времени на рубку ухода за лесом в равнинных условиях. - М.: 1999. - 83 с.
4. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
5. Баленко, С.В. Школа выживания. - М.: 1994. - 140 с.



Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения однопозиционных средств обнаружения (СО), построенных на радиолучевом или инфракрасном принципах обнаружения, для сигнализационного прикрытия двухсторонней развилки дороги. Способ заключается в развертывании на развилке дороги двух однопозиционных СО таким образом, чтобы они находились с противоположных сторон от места разветвления дороги и ось зоны обнаружения (ЗО) каждого СО лежала на одной из расходящихся дорог, причем не менее 4/5 длины ЗО закрывало участок дороги, сами ЗО пересекались в месте разветвления дороги, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги (СТ) от СО при появлении нарушителя на развилке; обеспечении регистрации последующего СТ от соответствующего СО; применении алгоритма, определяющего направление движения по поступившей последовательности из двух СТ, длительности задержки между их поступлением и отношению между их длительностями. Способ включает подготовительный этап с развертыванием двух СО по установленной схеме и основной этап, который начинается с момента появления нарушителя на развилке и попадания его в ЗО СО. В ходе основного этапа направление движения определяется по разработанному алгоритму. Технический результат состоит в снижении временных затрат, затрат сил и средств на развертывание средств обнаружения, обеспечении скрытности применения средств обнаружения на местности. 7 ил.
Способ сигнализационного прикрытия двухсторонней развилки дороги, заключающийся в развертывании двух средств обнаружения на развилке дороги, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от средства обнаружения при появлении нарушителя на развилке; обеспечении регистрации последующего сигнала тревоги от соответствующего средства обнаружения; применении алгоритма, определяющего направление движения по поступившей последовательности из двух сигналов тревоги согласно таблице соответствия направления движения нарушителя и последовательности сигналов тревоги, отличающийся тем, что применяются однопозиционные средства обнаружения, которые разворачиваются с противоположных сторон от места разветвления дороги таким образом, чтобы ось зоны обнаружения каждого средства обнаружения лежала на одной из расходящихся дорог, причем не менее 4/5 длины зоны обнаружения закрывало участок дороги, сами зоны обнаружения пересекались в месте разветвления дороги; в алгоритме определения направления движения также учитывается длительность задержки между их поступлением сигналов и отношение между их длительностями.
| RU 2012136223 A 27.02.2014 | |||
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 2010 |
|
RU2455692C1 |
| US 20060139163 A1 29.06.2006 | |||
| US 0004458240 A1 03.07.1984. | |||

