Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения радиоволновых линейных средств обнаружения (СО) для сигнализационного контроля двух рядом лежащих дорог.
Часто маршрут движения нарушителя на местности проходит по имеющейся дорожной сети. Знание силами реагирования направления движения нарушителя имеет большое значение, так как позволяет сузить направление его поиска и повысить вероятность его обнаружения и задержания [1]. Поэтому сигнализационному прикрытию дорожной сети уделяется значительное внимание. Одним из часто встречаемых элементов дорожной сети являются две непересекающиеся дороги, расположенные на небольшом удалении друг от друга (до 200 м) [2].
На практике для сигнализационного прикрытия участков дорожной сети широко применяются радиоволновые линейные средства обнаружения, характеризующиеся значительной протяженностью зоны обнаружения (ЗО) - от 50 до 500 метров [3, 4].
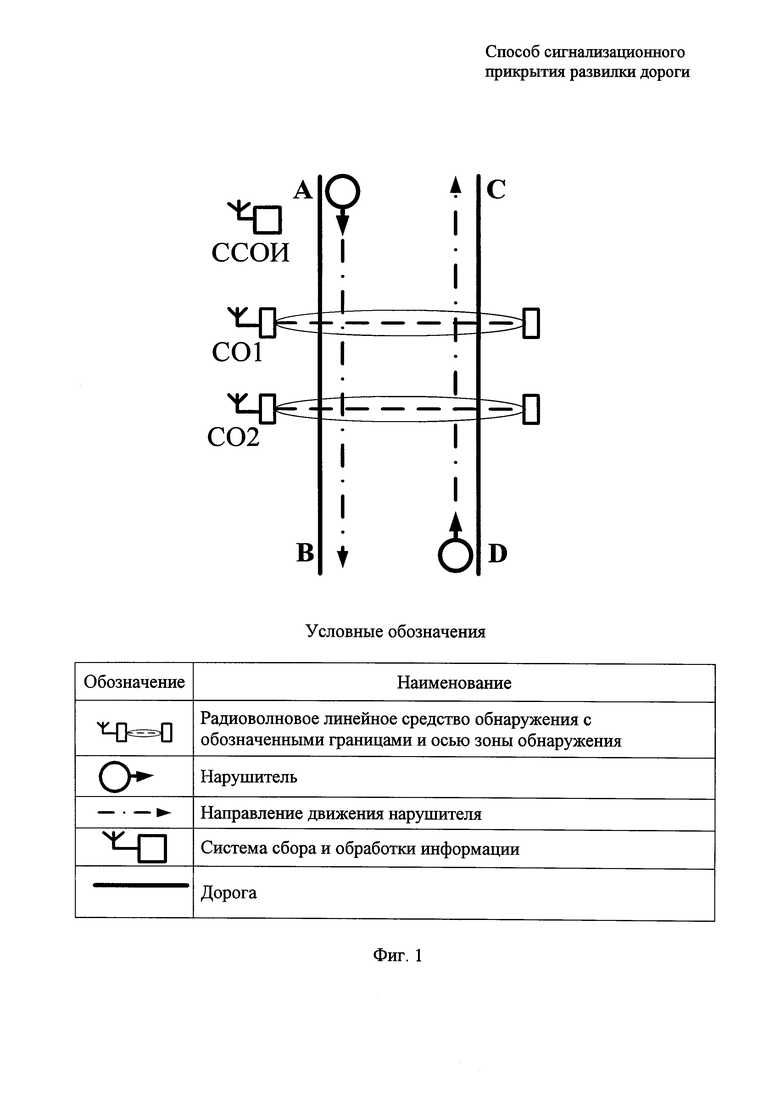
Известен способ охранного мониторинга, заключающийся в контроле двух рядом лежащих дорог двумя СО, развернутыми в два рубежа поперек этих дорог, обнаружении нарушителя при пересечении им ЗО СО и определении стороны, в которую он движется по последовательности из двух сигналов тревог, поступивших от СО за установленный интервал времени (фиг 1). [3]
Указанный способ имеет недостаток, он определяет только сторону, в которую движется нарушитель, а не само направление движения (по какой дороге и в какую сторону движется нарушитель). В других известных способах, определяющих направление движения нарушителя через участок местности с двумя дорогами, применяются три и более СО [3].
Целью изобретения является получение возможности определения направления движения обнаруженного нарушителя, двигающегося по одной из двух рядом лежащих дорог (по какой дороге и в какую сторону движется нарушитель), с применением только двух СО.
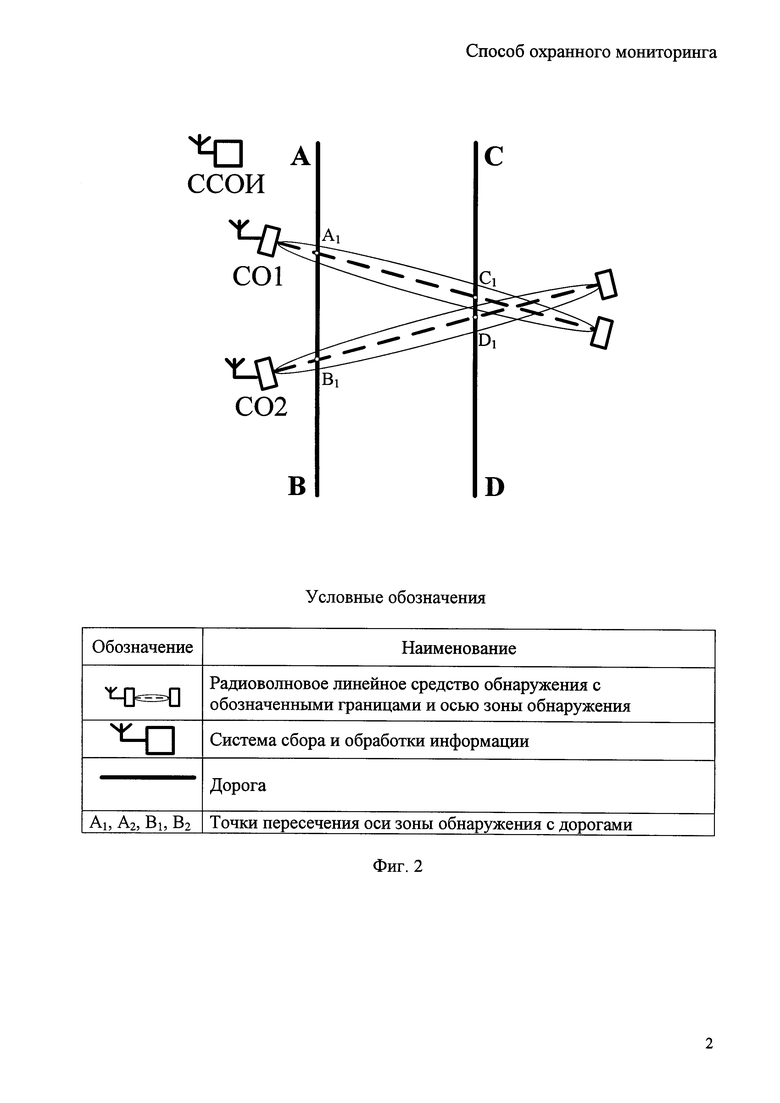
Для достижения поставленной цели разработан способ охранного мониторинга, заключающийся в контроле двух рядом лежащих дорог двумя СО, развернутыми в два рубежа поперек этих дорог, так чтобы на одной из дорог их ЗО соприкасались друг с другом без пересечения осей; расстояние между осями ЗО на другой дороге было не менее чем в два раза больше расстояния, проходимого нарушителем с максимально возможной скоростью для данной местности за время, необходимое СО для перехода из режима тревоги в дежурный режим после выхода нарушителя из ЗО; последовательном переходе СО в режим тревоги при движении нарушителя по одной из дорог; применении алгоритма, определяющего направление движения нарушителя по очередности поступления сигналов тревоги от СО и по наличию или отсутствию промежутка времени, в котором оба средства находятся в режиме тревоги (фиг. 2-5).
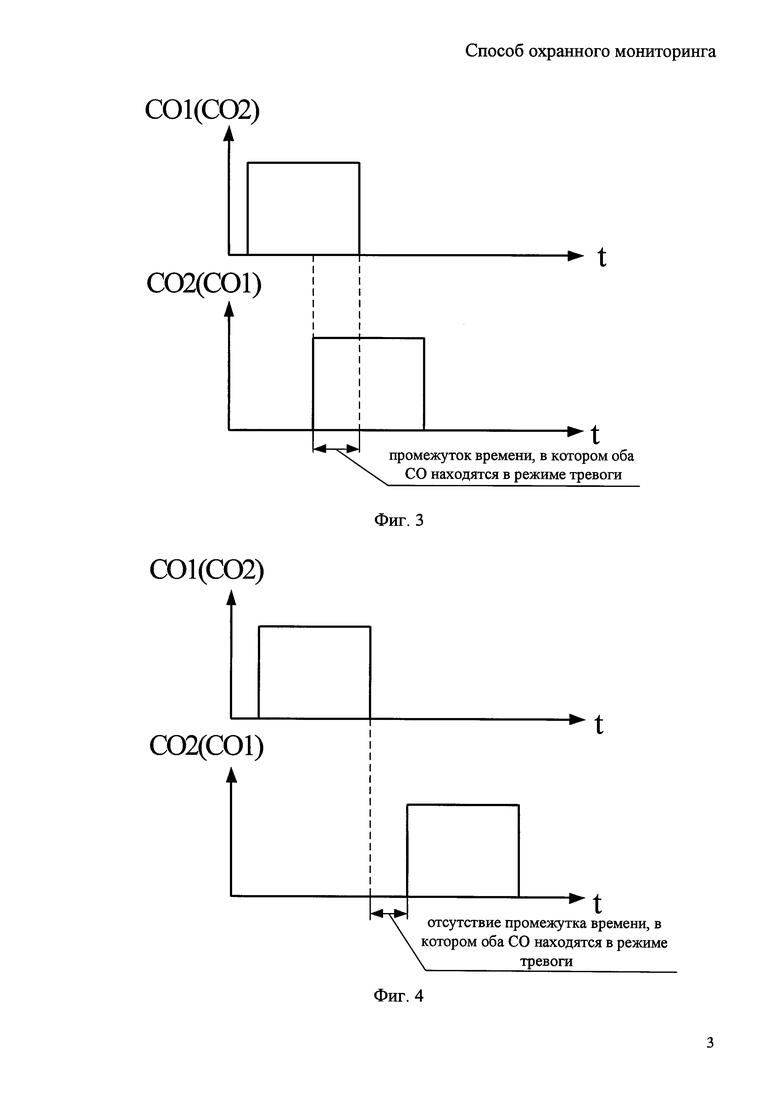
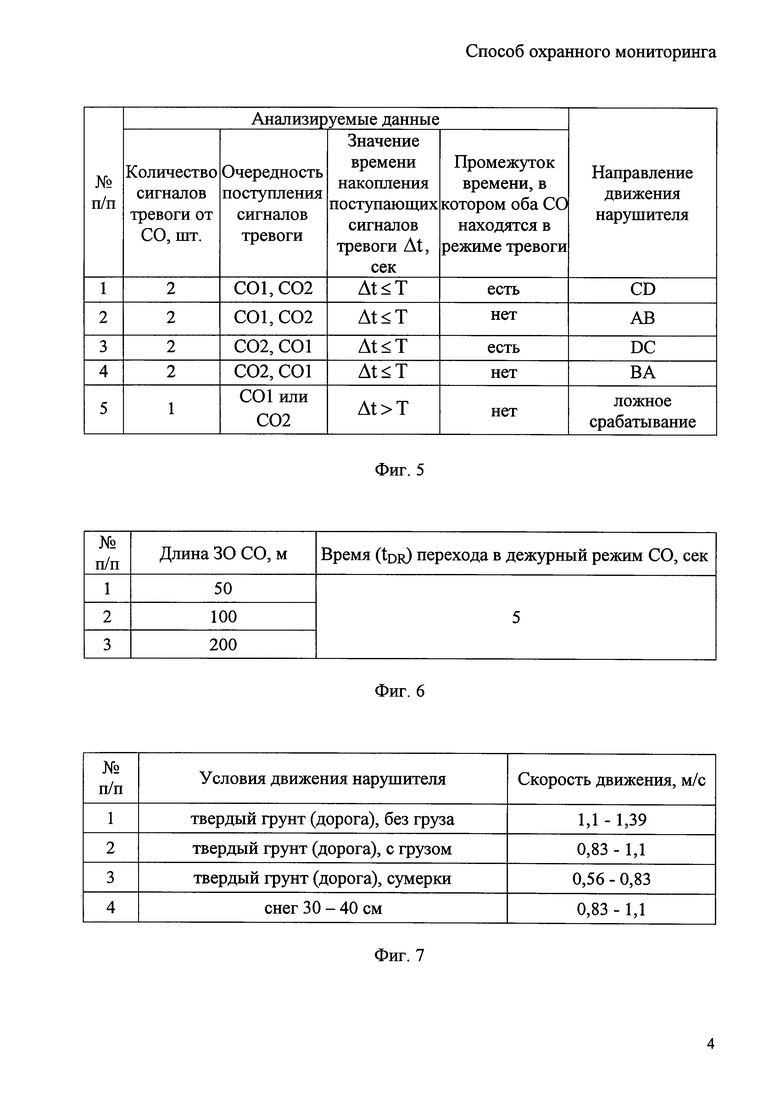
При движении нарушителя в направлении CD на ССОИ последовательно поступают два сигнала тревоги - сначала от СО1, затем от СО2. Так как нарушитель пересекает место где ЗО СО соприкасаются друг с другом, то фиксируется промежуток времени, в котором оба СО находятся в режиме тревоги. После выхода нарушителя из ЗО средства поочередно переходят в дежурный режим (фиг. 3, 5).
При движении нарушителя в направлении DC на ССОИ последовательно поступают два сигнала тревоги - сначала от СО2, затем от CО1. Так же как и для направления CD, фиксируется промежуток времени, в котором оба СО находятся в режиме тревоги. После выхода нарушителя из ЗО средства поочередно переходят в дежурный режим (фиг. 3, 5).
При движении нарушителя в направлении АВ сначала СО1 переходит в режим тревоги, затем в дежурный режим. После этого СО2 переходит в режим тревоги, затем в дежурный режим. Промежуток времени, в котором оба СО находятся в режиме тревоги, не фиксируется, так как расстояние между осями ЗО СО1 и СО2 не менее чем в два раза больше расстояния, проходимого нарушителем с максимально возможной скоростью для данной местности за время, необходимое СО для перехода из режима тревоги в дежурный режим после выхода нарушителя из ЗО (фиг. 4, 5).
При движении нарушителя в направлении ВА на ССОИ последовательно поступают сигналы тревоги, сначала от СО2, затем от СО1. Так же как и для направления АВ, промежуток времени, в котором оба СО находятся в режиме тревоги, не фиксируется (фиг. 4, 5).
На направлении АВ (ВА) ЗО СО должны быть разведены на расстояние, обеспечивающее переход второго СО в режим тревоги, только после того, как первое сработавшее СО установится в дежурный режим. Это расстояние берется удвоенным и рассчитывается исходя из максимально возможной скорости движения нарушителя и времени перехода СО в дежурный режим (фиг. 6, 7):

где A1B1 - расстояние между осями ЗО СО1 и СО2 на направлении АВ (ВА), м;
tDR - время перехода в дежурный режим СО, сек;
VMAX _ максимальная скорость движения нарушителя для данной местности, м/с.
Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности, они известны и подтверждены на основе экспериментальных исследований (фиг. 7) [5].
Для выявления случаев поступления одиночных ложных сигналов тревог от СО время накопления поступающих сигналов тревог (Δt) ограничивается:

где Δt - время накопления поступающих сигналов тревог, с;
T - максимальное значение расчетного интервала времени накопления поступающих сигналов, с.
Максимальное значение расчетного интервала времени накопления поступающих сигналов (T) рассчитывается исходя из максимального расстояния между осями ЗО (A1B1) СО и минимальной скорости движения нарушителя по дорогам (VMIN):

где VMIN - минимальная скорость движения нарушителя для данной местности, м/с;
1,2 - коэффициент запаса.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание средства 1 и 2 обнаружения по установленной схеме (фиг. 2).
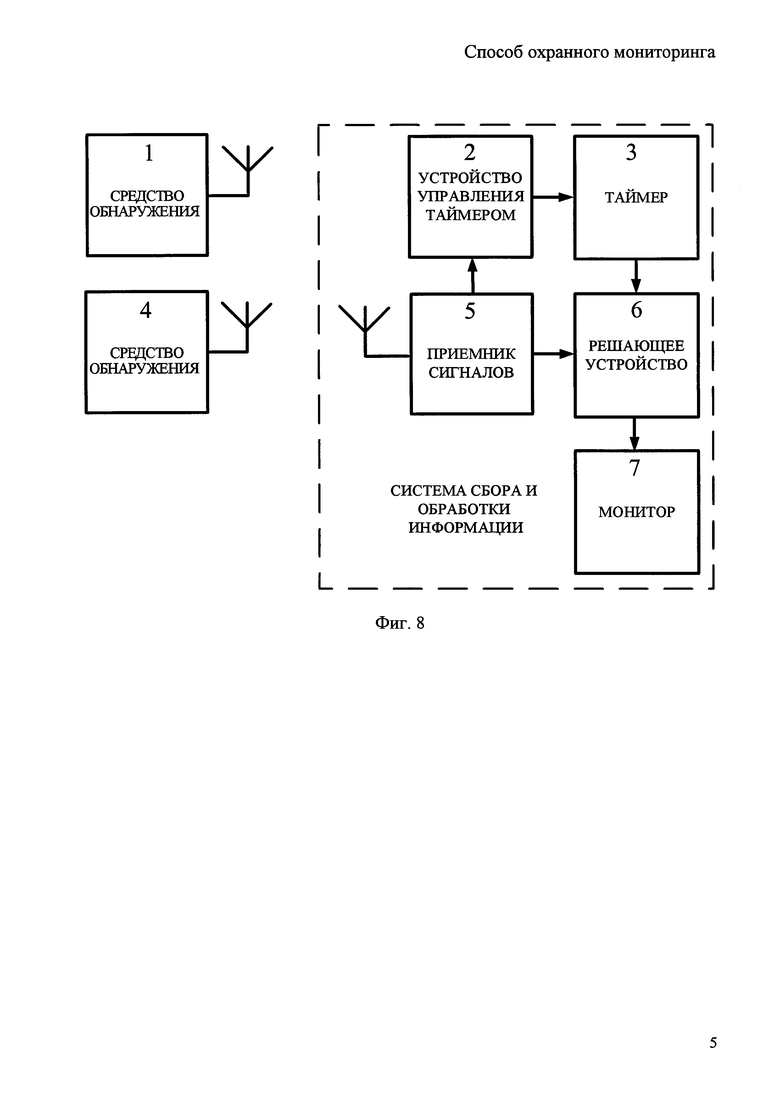
2. Развертывание на местности системы сбора и обработки информации, включающей в себя: устройство 2 управления таймером, таймер 3, приемник 5 сигналов, решающее устройство 6, монитор 7 (фиг. 8).
3. Составление таблицы принятия решения (алгоритма) о направлении движения нарушителя и загрузку ее в решающее устройство 5 (фиг. 5).
4. Определение максимального значения интервала времени накопления поступающих сигналов (Т) и загрузку его в решающее устройство 5 (фиг. 8), (формула 3).
Основной этап начинается при движении нарушителя по одной из дорог и попадании его в ЗО СО, он включает:
1. Регистрацию приемником 5 сигналов первого сигнала тревоги от средства 1 или 4 обнаружения при пересечении нарушителем его ЗО, запуск таймера 3 устройством 2 управления таймером, фиксацию времени поступления первого сигнала тревоги и начало отсчета времени накопления сигналов (Δt) таймером 3, запись этой информации в решающее устройство 6 (фиг. 8).
2. Регистрацию приемником 5 сигналов второго сигнала тревоги от средства 4 или 1 обнаружения при пересечении нарушителем его ЗО, фиксацию времени его поступления таймером 3, запись этой информации в решающее устройство 6 (фиг. 8).
3. Регистрацию приемником 5 сигналов окончания первого сигнала тревоги от средства 1 или 4 обнаружения при выходе нарушителя из его ЗО, фиксацию времени его окончания таймером 3, запись этой информации в решающее устройство 6 (фиг. 8).
4. Регистрацию приемником 5 сигналов окончания второго сигнала тревоги от средства 4 или 1 обнаружения при выходе нарушителя из его ЗО, фиксацию времени его окончания и завершение отсчета времени накопления сигналов (Δt) таймером 3, остановка таймера 3 устройством 2 управления таймером, запись этой информации в решающее устройство 6 (фиг. 8).
5. По времени начала и окончания сигналов тревоги от средств 1 и 4 обнаружения определение решающим устройством 6 наличия или отсутствия промежутка времени, в котором оба СО находились в режиме тревоги.
6. В случае когда значение времени накопления сигналов (Δt) меньше либо равно значению расчетного интервала времени накопления поступающих сигналов (Т), формирование вывода решающим устройством 6 о направлении движения нарушителя через две рядом лежащие дороги по очередности поступления сигналов тревоги от средств 1 и 4 обнаружения и по наличию или отсутствию промежутка времени, в котором оба средства находились в режиме тревоги (фиг. 7).
7. В случае превышения времени накопления сигналов (Δt) расчетного значения интервала времени накопления поступающих сигналов (Т) и не поступлении при этом второго сигнала от средства 4 или 1 обнаружения формирование вывода решающим устройством 6 о ложном срабатывании (фиг. 7).
8. Обнуление таймера 3 устройством 2 управления таймером.
9. Выведение результата вывода на монитор 6 (фиг. 5, 8).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания СО в известном способе охранного мониторинга;
- фиг. 2 - схема развертывания СО в предлагаемом способе;
- фиг. 3 - временной график срабатывания СО с промежутком времени, в котором оба СО находятся в режиме тревоги;
- фиг. 4 - временной график срабатывания СО без промежутка времени, в котором оба СО находятся в режиме тревоги;
- фиг. 5 - таблица принятия решения (алгоритм) о направлении движения нарушителя;
- фиг. 6 - таблица типовых геометрических размеров ЗО СО;
- фиг. 7 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 8 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя, двигающегося по одной из двух рядом лежащих дорог, с применением только двух СО.
Источники информации
1. Шумов, В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Псарев, А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
3. Коршняков, В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
4. Маршалов, Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
5. Баленко, С.В. Школа выживания. - М.: 1994. - 140 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2617575C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2017 |
|
RU2647668C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2017 |
|
RU2645548C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ЛИНЕЙНОГО РАДИОВОЛНОВОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2017 |
|
RU2645598C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА УЧАСТКА ДОРОГИ | 2017 |
|
RU2645204C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ДОРОГОЙ | 2015 |
|
RU2605507C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2612327C1 |
Изобретение относится к способам охранного мониторинга и может быть использовано в случаях применения радиоволновых линейных средств обнаружения (СО) для сигнализационного контроля двух рядом лежащих дорог. Способ заключается в контроле двух рядом лежащих дорог двумя СО, развернутыми в два рубежа поперек этих дорог, так чтобы на одной из дорог их зоны обнаружения (ЗО) соприкасались друг с другом без пересечения осей; расстояние между осями ЗО на другой дороге было не менее чем в два раза больше расстояния, проходимого нарушителем с максимально возможной скоростью для данной местности за время, необходимое СО для перехода из режима тревоги в дежурный режим после выхода нарушителя из ЗО, последовательном переходе СО в режим тревоги при движении нарушителя по одной из дорог; применении алгоритма, определяющего направление движения нарушителя по очередности поступления сигналов тревоги от СО и по наличию или отсутствию промежутка времени, в котором оба средства находятся в режиме тревоги. Способ включает подготовительный этап с развертыванием по разработанной схеме двух СО и основной этап, включающий обнаружение нарушителя и формирование вывода о направлении его движения. Технический результат заключается в получении возможности определения направления движения обнаруженного нарушителя, двигающегося по одной из двух рядом лежащих дорог, с применением только двух СО. 8 ил.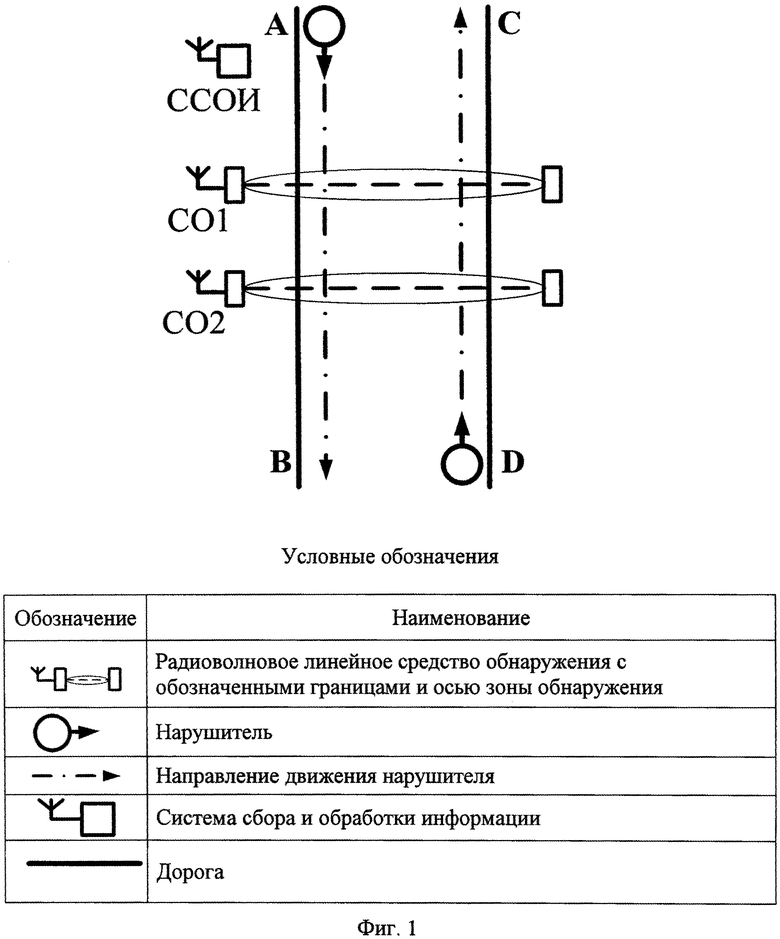
Способ охранного мониторинга, заключающийся в контроле двух дорог двумя радиоволновыми линейными средствами обнаружения, развернутыми в два рубежа поперек этих дорог, обнаружении нарушителя при пересечении им зоны обнаружения радиоволнового линейного средства обнаружения и определении стороны, в которую он движется, по последовательности из двух сигналов тревог, поступивших от радиоволновых линейных средств обнаружения за установленный интервал времени, отличающийся от известных тем, что радиоволновые линейные средства обнаружения развертываются таким образом, чтобы на одной из дорог их зоны обнаружения соприкасались друг с другом без пересечения осей; расстояние между осями зон обнаружения на другой дороге было не менее чем в два раза больше расстояния, проходимого нарушителем с максимально возможной скоростью для данной местности за время, необходимое радиоволновому линейному средству обнаружения для перехода из режима тревоги в дежурный режим после выхода нарушителя из зоны обнаружения; в алгоритме, определяющем направление движения нарушителя, учитывается наличие или отсутствие промежутка времени, в котором оба средства находятся в режиме тревоги.
| US 5982288 A, 09.11.1999 | |||
| DE 202010016708 U1, 26.05.2011 | |||
| Устройство для заправки нитевидного материала | 1976 |
|
SU745838A1 |
| WO 2012078076 A2, 14.06.2012. | |||

