Изобретение относится к системам автоматического управления движением надводных кораблей, судов, плавучих платформ и предназначено для реализации автоматического управления движением при динамическом позиционировании в условиях изменяющихся внешних воздействий.
Известна система восстановления параметров движения корабля, обеспечивающая выработку достоверной и высококачественной информации о динамике движения корабля и выдачу сигналов, необходимых для управления движением корабля (RU 2071109).
Недостатком известной системы является то, что она способна устранять рассогласования только по курсу и не способна устранять рассогласования по координатам местоположения, то есть не может быть использована при позиционировании. Кроме того, в ней отсутствует адаптация параметров системы к изменяющимся внешним воздействиям.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является аппаратура автоматического управления движением судна (RU 2144884), принятая нами в качестве прототипа, содержащая задатчик направления, датчик угла перекладки руля, суммирующий усилитель, приемоиндикатор спутниковой навигационной системы (СНС) и блок дифференцирования.
Недостатком прототипа является то, что он способен устранять рассогласования только по путевому углу и не способен устранять рассогласования по координатам местоположения, то есть не может быть использован при позиционировании.
Сущность изобретения заключается во введении в систему, содержащую приемоиндикатор СНС, задатчик курса и координат позиционирования, сумматор и блок формирования сигналов управления, блока коррекции параметров системы автоматического управления движением (САУД), позволяющего устранять рассогласования по курсу и по координатам местоположения с учетом изменяющихся внешних воздействий.
Техническим результатом является высокая точность позиционирования и минимальное время занятия точки позиционирования надводным кораблем, судном, плавучей платформой при автоматическом управлении движением в условиях изменяющихся внешних воздействий.
Изобретение поясняется графическими материалами:
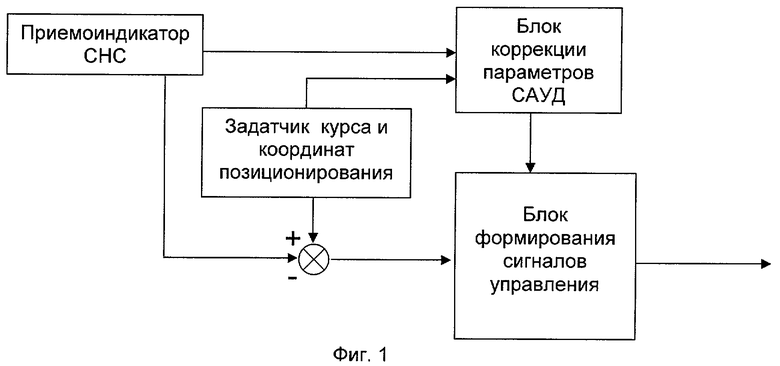
- Фиг.1 - функциональная схема устройства;
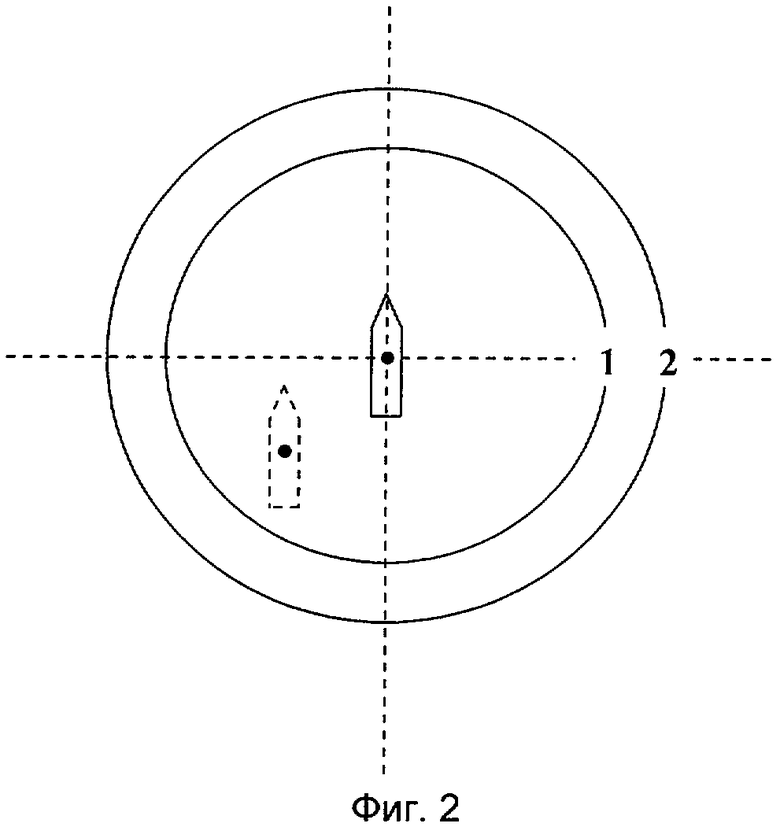
- Фиг.2 - кольца дальности до точки позиционирования.
САУД судна (Фиг.1) содержит блок коррекции параметров САУД, блок формирования сигналов управления, задатчик курса и координат позиционирования, сумматор и приемоиндикатор CMC, выход которого соединен с первым входом сумматора, выход которого соединен с входом блока формирования сигналов управления, второй вход сумматора соединен с выходом задатчика курса и координат позиционирования, вход блока коррекции параметров САУД соединен с выходом задатчика курса и координат позиционирования и с выходом приемоиндикатора СНС, выход блока коррекции параметров САУД соединен с входом блока формирования сигналов управления, выход которого является выходом системы.
На фиг.2 в центре рисунка сплошной линией обозначено расположение судна в заданной точке позиционирования, а пунктиром - его текущее местоположение, 1 - внутреннее кольцо дальности от заданной точки позиционирования, 2 - внешнее кольцо дальности от заданной точки позиционирования.
Работа устройства осуществляется следующим образом.
На сумматор САУД судна поступают заданные координаты с задатчика курса и координат позиционирования вместе с координатами от приемоиндикатора СНС, после сумматора сигнал рассогласования поступает в блок формирования сигналов управления. Так же данные от приемоиндикатора СНС и задатчика курса и координат позиционирования поступают в блок коррекции параметров САУД, после которого сигнал поступает в блок формирования сигналов управления. Блок формирования сигналов управления на основании данных, полученных от блока коррекции параметров САУД и от сумматора, формирует сигнал, который поступает на вход органов управления.
Блок коррекции параметров САУД представляет собой решающее устройство, которое по динамическим характеристикам координат объекта управления осуществляет адаптацию параметров САУД к изменяющимся внешним условиям и выдачу этих параметров в блок формирования сигналов управления. Адаптация параметров САУД выполняется путем задания двух колец дальности от точки позиционирования (Фиг.2): при нахождении центра масс судна за пределами внешнего кольца 2 постоянная времени САУД устанавливается минимальной, чтобы при интенсивных внешних воздействиях система управления успевала справляться со сносом и возвращала центр масс судна в зону точки позиционирования.
При нахождении центра масс судна в пределах внутреннего кольца 1 постоянная времени САУД устанавливается максимальной.
Радиусы колец рассчитываются в момент задания точки позиционирования по формулам (1), (2).


где
σ - среднеквадратичное отклонение (СКО) центра масс судна от точки позиционирования, м;
t - время усреднения навигационной информации, с;
V - средняя скорость движения судна в условиях изменяющихся внешних воздействий, м/с.
Например, если СКО - 1,5 м, время усреднения навигационной информации - 30 с, средняя скорость движения судна в условиях изменяющихся внешних воздействий - 0,05 м/с, то радиус внутреннего кольца равен 4,5 м, радиус внешнего кольца равен 6 м.
Зона между кольцами дальности является переходной. Постоянная времени САУД в этой зоне зависит от направления движения судна: если центр масс судна зашел в переходную зону из-за пределов внешнего кольца 2, то постоянная времени САУД продолжает оставаться минимальной до пересечения внутреннего кольца, после пересечения она становится максимальной. Если центр масс судна входит в переходную зону из внутреннего кольца (например, при интенсивном сносе), то постоянная времени САУД остается максимальной до пересечения внешнего кольца, после пересечения она становится минимальной.
В качестве приемоиндикатора CMC может быть использован спутниковый навигационный приемник СН-3101.
Работа блоков может быть реализована на известных элементах цифровой техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2017 |
|
RU2658469C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
Изобретение относится к системам автоматического управления движением надводных кораблей, судов, плавучих платформ и предназначено для реализации автоматического управления движением при динамическом позиционировании в условиях изменяющихся внешних воздействий. Система содержит приемоиндикатор спутниковой навигационной системы, задатчик курса и координат позиционирования, сумматор, блок формирования сигналов управления и блок коррекции параметров системы автоматического управления движением судна. Последний позволяет устранять рассогласования по курсу и по координатам местоположения посредством задания колец дальности от точки позиционирования с определением постоянной времени системы автоматического управления движением судна в зависимости от положения центра масс судна относительно этих колец дальности. Техническим результатом является высокая точность позиционирования и минимальное время занятия точки позиционирования надводным кораблем, судном, плавучей платформой при автоматическом управлении движением в условиях изменяющихся внешних воздействий. 2 ил.
Система автоматического управления движением судна, содержащая блок формирования сигналов управления, задатчик курса и координат позиционирования, сумматор и приемоиндикатор спутниковой навигационной системы, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом задатчика курса и координат позиционирования, а выход - с входом блока формирования сигналов управления, отличающаяся тем, что в систему дополнительно введен блок коррекции параметров системы автоматического управления движением судна, входы которого соединены с выходами задатчика курса и координат позиционирования и приемоиндикатора спутниковой навигационной системы, а выход - с дополнительным входом блока формирования сигналов управления, при этом блок коррекции параметров системы автоматического управления движением судна выполнен с возможностью устранения рассогласований по курсу и по координатам посредством задания колец дальности от точки позиционирования с определением постоянной времени системы автоматического управления движением судна в зависимости от положения центра масс судна относительно этих колец дальности.
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| RU 2071109 C1, 27.12.1996. | |||

