Изобретение относится к измерительной технике и может применяться в навигационно-пилотажных системах летательных аппаратов. Изобретение основано на принципе измерения угловых скоростей движущихся объектов, при котором чувствительную массу датчика приводят в колебательное движение, одновременно на колеблющуюся чувствительную массу воздействуют измеряемой угловой скоростью, получают ускорение Кориолиса тем, что выполняют два измерения, при первом измеряют сумму линейного ускорения и угловой скорости, а при втором отдельно измеряют линейное ускорение, затем из результата первого измерения вычитают результат второго измерения, полученный результат представляют как значение угловой скорости, операции вычитания, запоминания и выдачу результатов потребителю информации выполняют с помощью встроенного в датчик микроконтроллера.
Известен чувствительный элемент [1] микроакселерометра, выполненный по осевому типу. Состоит чувствительный элемент из однородной пластины проводящего кремния, внутри которой размещен на упругих пружинках подвижный узел (челнок). Гребенки встречно-штыревых преобразователей выполнены посредством ионного травления на чувствительной массе и электрически изолированы от нее зазорами.
Недостатками известного чувствительного элемента микроакселерометра являются низкая точность измерения ускорений.
Наиболее близким к заявляемому может служить чувствительный элемент [2], содержащий изоляционную подложку, на которой выращен слой жертвенного поликремния, а на слое жертвенного поликремния выращен слой кристаллического монокремния в виде несущей планарной области, в слое кристаллического монокремния методом плазменного травления выполнен подвижный узел, включающий чувствительную массу, упругие подвесы, жестко соединенные одним концом с несущей планарной областью, а вторым - с чувствительной массой, электроды электростатического преобразователя силы: подвижный и неподвижные, под подвижным узлом жертвенный слой поликремний стравлен.
Недостатками известного чувствительного элемента микрогироскопа являются:
1. Он не может быть выполнен на любые диапазоны измерений, требуемые в технике, поскольку чувствительный элемент имеет недостаточную массу.
2. Известный чувствительный элемент имеет низкую точность, обусловленную влиянием поперечных составляющих, поскольку пружинки подвеса имеют две степени свободы.
Задача, на решение которой направлено изобретение - расширение диапазона измерений и повышение точности с заявляемым инерциальным элементом микрогироскопа.
Этот технический результат достигается тем, что инерциальный элемент, содержащий изоляционную подложку, на которой выращен слой жертвенного поликремния, а на слое жертвенного поликремния выращен слой кристаллического монокремния в виде несущей планарной области, содержит также электронный блок на микроконтроллере, включенном в прямой цепи контура регулирования, и электростатический преобразователь силы, подвижные электроды которого жестко связаны с чувствительной массой, а неподвижные электроды изолированы от чувствительной массы сквозными травлениями, а в слое кристаллического монокремния методом ионно-плазменного травления выполнен подвижный узел, включающий чувствительную массу, упругие подвесы которого жестко соединены одними концами с несущей планарной областью, а вторыми - с чувствительной массой, чувствительная масса электрически соединена через упругие подвесы с «землей», под подвижным узлом жертвенный слой поликремния стравливают, подвижные и неподвижные электроды емкостного преобразователя перемещений выполнены в окне, вытравленном в средней части чувствительной массы, направление измеряемых перемещений совмещено с направлением действия электростатической силы отработки, неподвижные электроды преобразователя перемещений и преобразователя силовой отработки имеют длину больше по сравнению с подвижными на величину максимального принудительного хода чувствительной массы в поперечном направлении, сверху и снизу чувствительной массы выполнены подвижные электроды возбуждения принудительных колебаний массы с направлением, перпендикулярным направлению действия электростатической силы отработки, неподвижные электроды возбуждения принудительных колебаний масс изолированы от несущей планарной области монокремния сквозными травлениями, неподвижные электроды преобразователя перемещений подключены ко входам ШИМ микроконтроллера, монокремний чувствительной массы выполнен пористым за исключением мест соединения с упругими подвесами, а поры заполнены тяжелым металлом, например медью. Устранение влияния второй степени свободы на результаты измерений осуществляется тем, что длина подвижного электрода датчика перемещений выполнена больше длины подвижных электродов на величину максимальной амплитуды принудительной раскачки чувствительной массы. Устройство заявляемой полезной модели иллюстрируется фиг.1, где приняты следующие названия позициям: 1 - изоляционная подложка; 2 - планка для выполнения неподвижного силового электрода 3; 4 - пружина упругого подвеса; 5 - неподвижный электрод преобразователя принудительных колебаний; 6 - подвижный электрод преобразователя принудительных колебаний; 7 - подвижный электрод датчика перемещений; 8 - планка крепления пружины упругого подвеса; 9 - неподвижный электрод датчика перемещений; 10 - подвижный электрод силового преобразователя; 11 - чувствительная масса.
Пружины упругого подвеса 4 выполнены так, что им придано свойство неравножесткости. Толщина пружин составляет порядка 10 микрометров, а ширина более 100 микрометров. Соответственно жесткость по оси x значительно меньше жесткости по оси z. Это дает возможность отстраиваться от поперечных влияний.
Работа заявляемой полезной модели осуществляется следующим образом. При подаче переменного напряжения от встроенного генератора (на фиг. 1 не показан) на электрод 5 чувствительная масса 11 переходит в колебательные движения относительно оси z. Частота принудительных колебаний выбрана равной собственной частоте подвижного узла. При действии угловой скорости относительно оси z возникает кориолисова сила, которая действует по оси x. Величина этой силы равна:

где m - величина чувствительной массы;  - линейная скорость по оси y; Ωz - угловая скорость (измеряемая) относительно оси z.
- линейная скорость по оси y; Ωz - угловая скорость (измеряемая) относительно оси z.
Кориолисова сила приведет в колебательное движение чувствительную массу по оси х. Угловой измеряемой скорости при этом соответствует амплитуда этого колебательного движения.
Оценим погрешность от возможных поперечных воздействий угловой скорости Ωx. Чувствительная масса при этом должна получить колебательное движение по оси z, но здесь пружина подвеса направлена к движению широкой стороной, причем в данном случае этот размер в значение жесткости входит в кубе. Таким образом на измерение полезного сигнала поперечная составляющая имеет пренебрежимо малое влияние. Достижение поставленной цели - повышение чувствительности осуществлено посредством выполнения пористости чувствительной массы и заполнения пор медью - тяжелым металлом по сравнению с кремнием.
Источники информации
1. Акселерометр ADXL104. Аналог дивайс. 2005-2011 гг.
2. Вавилов В.Д. Теоретические основы микросистемных акселерометров и гироскопов. Изд-во НГТУ, 2011, С. 204.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОСИСТЕМНОГО ГИРОСКОПА | 2014 |
|
RU2556334C1 |
| МИКРОГИРОСКОП ПРОФЕССОРА ВАВИЛОВА | 2012 |
|
RU2490592C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490754C1 |
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРО-, НАНОДВИГАТЕЛЬ | 2008 |
|
RU2374746C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2251114C1 |
| МИКРОАКСЕЛЕРОМЕТР | 2012 |
|
RU2490650C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОГО ЭЛЕМЕНТА ПАМЯТИ С ПОДВИЖНЫМИ ЭЛЕКТРОДАМИ | 2015 |
|
RU2584267C1 |
Изобретение относится к измерительной технике и может применяться в навигационно-пилотажных системах летательных аппаратов. Сущность изобретения заключается в том, что чувствительный элемент микроэлектромеханического гироскопа выполнен из монокристаллического кремния, представляющий конструкцию «рамка в рамке». При этом во внешней рамке выполнен электростатический силовой преобразователь, компенсирующий в ней кориолисов момент, возникающий в ней при вторичных колебаниях, передаваемых от внутренней рамки. Технический результат - повышение точности измерений. 1 ил.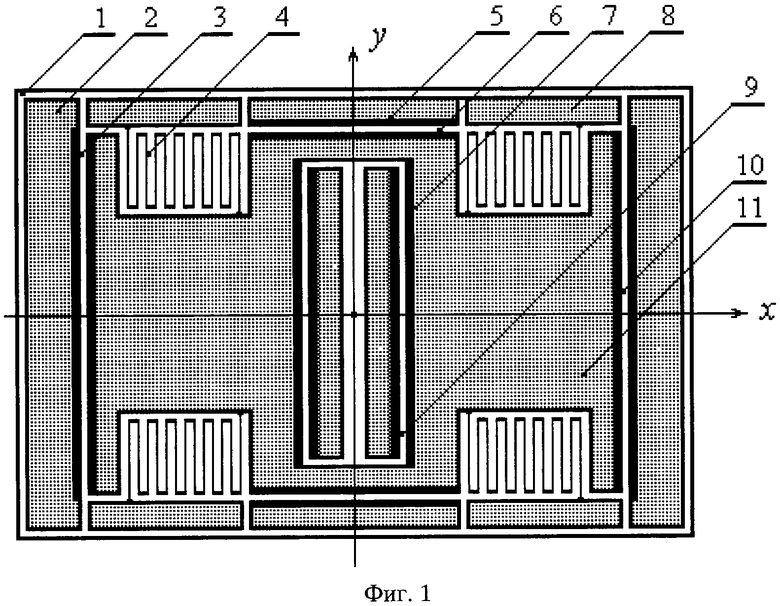
Инерциальный элемент, содержащий изоляционную подложку, на которой выращен слой жертвенного поликремния, а на слое жертвенного поликремния выращен слой кристаллического монокремния в виде несущей планарной области, содержит также электронный блок на микроконтроллере, включенном в прямой цепи контура регулирования, и электростатический преобразователь силы, подвижные электроды которого жестко связаны с чувствительной массой, а неподвижные электроды изолированы от чувствительной массы сквозными травлениями, отличающийся тем, что в слое кристаллического монокремния методом ионно-плазменного травления выполнен подвижный узел, включающий чувствительную массу, упругие подвесы которого жестко соединены одними концами с несущей планарной областью, а вторыми - с чувствительной массой, чувствительная масса электрически соединена через упругие подвесы с «землей», под подвижным узлом жертвенный слой поликремния стравливают, подвижные и неподвижные электроды емкостного преобразователя перемещений выполнены в окне, вытравленном в средней части чувствительной массы, направление измеряемых перемещений совмещено с направлением действия электростатической силы отработки, неподвижные электроды преобразователя перемещений и преобразователя силовой отработки имеют длину больше по сравнению с подвижными на величину максимального принудительного хода чувствительной массы в поперечном направлении, сверху и снизу чувствительной массы выполнены подвижные электроды возбуждения принудительных колебаний массы с направлением, перпендикулярным направлению действия электростатической силы отработки, неподвижные электроды возбуждения принудительных колебаний масс изолированы от несущей планарной области монокремния сквозными травлениями, неподвижные электроды преобразователя перемещений подключены ко входам ШИМ микроконтроллера, монокремний чувствительной массы выполнен пористым за исключением мест соединения с упругими подвесами, а поры заполнены тяжелым металлом, например медью.
| ИНТЕГРАЛЬНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 2010 |
|
RU2431850C1 |
| Плуг | 1938 |
|
SU55148A1 |
| US 5567880 A1, 22.10.1996 | |||
| WO 2012131682 A1, 04.10.2012. | |||

