ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к устройству для визуализации объекта, системе для визуализации объекта, способу визуализации объекта, элементу компьютерной программы для управления таким устройством или системой для выполнения такого способа и машиночитаемому носителю, хранящему такой элемент компьютерной программы.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В рентгенографии исследуемая анатомическая область известна до обследования. Следовательно, почти во всех случаях можно предварительно выбрать соответствующую обработку изображений. Кроме того, в радиологии обычно наблюдается задержка между осмотром и диагностикой, что дает рентгенологу возможность изменить или адаптировать обработку изображений позже. Напротив, при рентгеноскопии исследуемая анатомическая область часто меняется во время исследования. Это означает, что по сравнению с радиологией к изображениям различных анатомических областей должна применяться более общая обработка изображений. Такая общая обработка изображений может быть неоптимальной для конкретных анатомических областей.
US 2010/183206 (A1) раскрывается автоматически настраиваемый протокол сбора данных для динамической медицинской визуализации, такой как динамическая КТ, МРТ или ПЭТ визуализация. Протоколы настраиваются на основе анатомических и динамических моделей, которые индивидуализируются или подгоняются для каждого пациента на основе предварительного сканирования. Регулировка может компенсировать изменения в пациенте, обусловленные движением пациента (например, дыханием или сердцебиением) или потоком контраста или отслеживающего агента при осуществлении последовательности. Динамическая модель может быть моделью движения, используемой для прогнозирования движения анатомических/физиологических характерных признаков, как правило, органов, во время сканирования, или гемодинамической моделью, используемой для прогнозирования потока контрастного вещества, что позволяет точно синхронизировать последовательность сканирования.
В DE 10 2012 201798A1 раскрыт способ планирования рентгеновской визуализации с низкой радиационной экспозицией области исследования объекта, содержащий следующие этапы: S1) Прием параметров конфигурации устройства рентгеновской визуализации; S2) Определение положения по меньшей мере одной части объекта; S3) Определение по меньшей мере одной облучаемой области объекта, которая отображается в зависимости от параметров конфигурации устройства рентгеновской визуализации и положения по меньшей мере одной части объекта. Кроме того, изобретение описывает устройство для планирования рентгеновской визуализации с низким уровнем радиационного воздействия.
В WO 2014/033614 A1 раскрывается устройство и способ для автоматического или полуавтоматического управления коллиматором рентгеновского формирователя изображения для коллимации рентгеновского пучка формирователя изображения и регулировки выставления рентгеновского формирователя изображения по отношению к объекту. Операция коллимации и выставления основана на данных трехмерного изображения объекта, подлежащего визуализации. Данные 3D-изображения собираются датчиком. Датчик работает на неионизирующем излучении. Данные 3D-изображения описывают форму в трехмерном пространстве объекта, и из нее выводятся анатомические ориентиры, чтобы определить окно коллимации для исследуемой области. На основе окна коллимации настройка коллиматора и выставление формирователя изображения регулируются соответствующим образом.
Однако обработка изображений может быть улучшена.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В этом отношении может возникнуть необходимость в предоставлении устройства для визуализации объекта, которое позволяет улучшить обработку изображения.
Задача настоящего изобретения решается объектами, описанными в независимых пунктах формулы изобретения, причем дополнительные варианты осуществления включены в зависимые пункты формулы изобретения. Следует отметить, что аспекты изобретения, описанные ниже, относятся также к устройству визуализации, системе визуализации, способу визуализации, элементу компьютерной программы и машиночитаемому носителю.
В соответствии с настоящим изобретением представлено устройство для визуализации объекта. Устройство визуализации содержит блок обеспечения и блок обработки. Блок обеспечения выполнен с возможностью выдачи данных о положении и ориентации объекта, подлежащего визуализации. Блок обеспечения дополнительно выполнен с возможностью выдачи данных о положении и ориентации блока визуализации, скорректированных для последующей визуализации области объекта, подлежащего визуализации. Блок обработки выполнен с возможностью объединения данных о положении и ориентации объекта и данных о положении и ориентации блока визуализации для определения области, подлежащей последующей визуализации, и для установки по меньшей мере одного параметра визуализации блока визуализации на основе определенной области, подлежащей последующей визуализации.
Здесь данные о положении, а также данные об ориентации могут быть либо двумерными («2D»), либо трехмерными («3D»). Например, данные о положении могут быть представлены в виде координат вдоль двух или трех взаимно независимых направлений, например, в 2D или 3D-декартовом пространстве, соответственно. Кроме того, данные об ориентации могут, например, быть представлены в виде углов поворота относительно двух или трех взаимно независимых направлений, например, в 2D или 3D-декартовом пространстве соответственно. В примере данные о положения и данные об ориентации используют общий (под-) набор двумерных или трехмерных направлений. В другом примере данные о положения и данные об ориентации используют взаимно разные наборы двумерных или трехмерных направлений.
Блок обработки может определять, то есть предсказывать на основе комбинации данных о положении и данных об ориентации, как объекта, так и блока визуализации, область, которая впоследствии будет отображаться. При этом блоку обработки не нужно полагаться (хотя он может включать) на информацию, касающуюся имеющегося протокола медицинской визуализации. Например, блок обработки может иметь возможность различать задне-передний («ЗП») снимок и передне-задний («ПЗ») снимок на основе комбинации данных о положении объекта с данными об ориентации блока визуализации. Кроме того, например, блок обработки может иметь возможность определять направление сканирования, например, от головы до ног или наоборот, на основе комбинации данных о положении объекта и данных о положении блока визуализации. Кроме того, например, блок обработки может иметь возможность определять область, подлежащую последующей визуализации, на основе данных о положении блока визуализации и подобного направления сканирования.
Динамическая рентгеновская система, например система рентгеноскопии, выполнена с возможностью визуализации нестатической области, то есть области, подлежащей визуализации, которая не является неизменной во времени. Устройство для визуализации объекта в соответствии с настоящим изобретением, в частности, делает возможным успешное клиническое применение в такой динамической рентгеновской системе, как при диагностическом, так и в интервенционном применении. То есть устройство согласно настоящему изобретению благодаря своей возможности предсказать область, подлежащую последующей визуализации, и установить по меньшей мере один параметр визуализации на основе такого предсказания - преимущественно может автоматически выбирать и устанавливать в зависимости от области, подлежащей последующей визуализации, оптимальное, то есть наиболее подходящее значение для по меньшей мере одного параметра визуализации. Следовательно, устройство для визуализации объекта в соответствии с настоящим изобретением преимущественно избегает выбора и/или установки неоптимального значения по меньшей мере одного параметра визуализации, применимого ко всему объекту. Здесь параметр визуализации включает в себя параметры обработки изображений, а также параметры, относящиеся к самой визуализации, параметры, относящиеся к облучению, например параметры, относящиеся к облучению, такие как напряжение генератора, предварительная фильтрация трубки и доза в случае, если блок визуализации содержит источник рентгеновского излучения.
В примере объект, подлежащий визуализации, является пациентом, а область, подлежащая последующей визуализации, является анатомической областью.
В примере блок обеспечения выполнен с возможностью выдачи данных о положении и/или ориентации объекта и/или блока визуализации относительно области объекта, подлежащего визуализации. В другом примере блок обеспечения выполнен с возможностью выдачи данных об абсолютном положении и/или ориентации объекта и/или блока визуализации. На основе этой информации блок обработки может быть выполнен с возможностью вычисления данных об относительном положении и/или ориентации объекта и/или блока визуализации.
Блок визуализации может быть рентгеновской системой. В примере данные о положении и ориентации блока визуализации содержат положение и ориентацию рентгеновской трубки, рентгеновского детектора и/или коллиматора.
В примере блок обеспечения дополнительно выполнен с возможностью выдачи анатомической модели объекта, анатомическая модель имеющей один или более анатомических ориентиров, и выдачи данных о положении и ориентации объекта путем объединения анатомической модели и одного или более анатомических ориентиров. Предпочтительно, чтобы для оценки положения и ориентации объекта в трехмерном пространстве использовались по меньшей мере три ориентира.
В примере анатомическая модель предварительно выбирается из группы анатомических моделей на основе данных пациента и/или на основе предыдущего изображения или предварительного сканирования объекта или области, подлежащей последующей визуализации. Таким образом, можно предварительно выбрать анатомическую модель, например, для ребенка или взрослого, или худого, нормального или пациента с избыточным весом.
В примере анатомическая модель выполнена как адаптированная анатомическая модель на основе данных пациента и/или на основе предыдущего изображения области, подлежащей последующей визуализации. Таким образом, анатомическая модель может быть адаптирована к данному пациенту, например, к ребенку или взрослому, или к худому, нормальному или пациенту с избыточным весом.
В примере блок обеспечения дополнительно выполнен с возможностью обнаружения положения анатомического ориентира в данных пациента, собранных с помощью 2D и/или 3D оптических, видео, инфракрасных и/или ультразвуковых средств. Например, в случае, когда положение и ориентация объекта, подлежащего визуализации, является неизменным относительно блока визуализации и при условии, что ориентация рентгеновской трубки относительно рентгеновского детектора известна, двумерная оценка анатомического ориентира(ов) может быть достаточной. Эта оценка может основываться на простых видеоизображениях, определяющих контур объекта, подлежащего визуализации.
Например, устройство для визуализации объекта в соответствии с изобретением может быть частью динамической рентгеновской системы, то есть системы рентгеноскопии, в которой параметры визуализации автоматически выбираются на основе области, которая подлежит визуализации следующей. Здесь область, подлежащая последующей визуализации, идентифицируется путем объединения данных о положении и ориентации блока визуализации с данными положения и ориентации объекта, полученными из анатомической модели, имеющей анатомические ориентиры, причем ориентиры рассчитываются по предыдущему изображению или предварительному сканированию, например с использованием оптических, инфракрасных и/или ультразвуковых средств.
В примере, в котором устройство для визуализации объекта является частью динамической рентгеновской системы, блок обработки выполнен с возможностью обновления анатомической модели, поэтому анатомические ориентиры основаны на предыдущем изображении, полученном динамической рентгеновской системой. То есть динамическая рентгеновская система обычно генерирует ряд изображений, которые позволяют улучшить точность и/или качество, с которым положение анатомических ориентиров определяется процессором.
В соответствии с настоящим изобретением также представлена система визуализации объекта. Система визуализации содержит блок визуализации и устройство визуализации, как описано выше. Блок визуализации может содержать источник рентгеновского излучения и рентгеновский детектор. Такой источник рентгеновского излучения может содержать рентгеновскую трубку, приводимую в действие генератором высокого напряжения. По меньшей мере один параметр визуализации блока визуализации задается на основе области, определенной устройством визуализации, подлежащей последующей визуализации.
В соответствии с настоящим изобретением также представлен способ визуализации объекта. Он включает в себя следующие этапы, не обязательно в этом порядке:
а) выдача данных о положении и ориентации объекта, подлежащего визуализации,
b) выдача данных о положении и ориентации блока визуализации относительно области объекта и скорректированных для последующей визуализации этой области,
c) объединение данных о положении и ориентации объекта и данных о положении и ориентации блока визуализации для определения области, подлежащей последующей визуализации, и
d) установка по меньшей мере одного параметра визуализации блока визуализации на основе определенной области, подлежащей последующей визуализации.
В одном примере способ дополнительно включает в себя этап e для визуализации определенной области, подлежащей последующей визуализации.
Другими словами, способ визуализации объекта в соответствии с изобретением может включать в себя этапы:
- Сбор информации о положении пациента для оценки положения анатомических ориентиров.
- Сопоставление анатомической модели с этими ориентирами для оценки положения анатомических областей.
- Использование информации системы о положении и/или ориентации рентгеновской трубки, детектора и/или коллимации для определения конкретной анатомической области, облучаемой при следующем получении изображений.
- Выбор наиболее подходящей обработки изображений для этой анатомической области.
- Применение этой обработки изображения к следующему полученному изображению.
В соответствии с настоящим изобретением также представлен элемент компьютерной программы, содержащий средство программного кода, чтобы заставлять систему визуализации, как определено в независимом пункте формулы изобретения, выполнять этапы способа визуализации, как определено в независимом пункте формулы изобретения, когда компьютерная программа запускается на компьютере, управляющем системой визуализации.
Следует понимать, что устройство визуализации, система визуализации, способ визуализации, элемент компьютерной программы для управления таким устройством и машиночитаемый носитель, хранящий такой элемент компьютерной программы, в соответствии с независимыми пунктами формулы изобретения, имеют одинаковые и/или идентичные предпочтительные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения. Нужно также понимать, что предпочтительные варианты осуществления изобретения также могут представлять собой любые комбинации зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты настоящего изобретения станут очевидны и пояснены со ссылкой на описанные ниже варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примерные варианты осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи:
На Фиг.1 показан схематический чертеж примера системы для визуализации объекта в соответствии с изобретением.
На Фиг.2 показаны основные этапы примера способа визуализации объекта.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На Фиг.1 схематично и примерно показан вариант осуществления системы 1 визуализации для объекта 30 согласно изобретению. Объект 30, подлежащий визуализации, может быть пациентом, а область, подлежащая последующей визуализации, может быть анатомической областью. Система 1 визуализации содержит блок 20 визуализации и устройство 10 визуализации для отображения объекта 30, подлежащего визуализации. Блок 20 визуализации может содержать рентгеновскую трубку. По меньшей мере один параметр визуализации блока 20 визуализации задается на основе области, определенной устройством 10 визуализации, подлежащей последующей визуализации. Устройство 10 визуализации содержит блок 11 обеспечения и блок 12 обработки.
Блок 11 обеспечения выдает данные о положении и ориентации объекта 30, подлежащего визуализации, и данные о положении и ориентации блока 20 визуализации относительно области объекта 30. Блок 20 визуализации настраивается для последующей визуализации области.
Данные о положении и ориентации объекта 30 могут содержать положения анатомических ориентиров объекта 30, а блок 11 обеспечения может быть выполнен с возможностью выдачи анатомической модели и объединения анатомической модели и положений анатомических ориентиров объекта для выдачи данных о положения и ориентации объекта 30. Блок обеспечения может дополнительно обнаруживать положение анатомического ориентира в данных пациента, собранных с помощью 2D и/или 3D оптических, видео, инфракрасных и/или ультразвуковых средств.
Данные о положении и ориентации блока 20 визуализации могут содержать положение и ориентацию рентгеновской трубки, рентгеновского детектора и коллиматора. Блок 12 обработки объединяет данные о положении и ориентации объекта 30 и данные о положении и ориентации блока 20 визуализации, чтобы определить область, подлежащую последующей визуализации, и установить по меньшей мере один параметр визуализации блока 20 визуализации на основе определенной области, подлежащей последующей визуализации.
Таким образом, устройство 10 визуализации согласно изобретению автоматически устанавливает наиболее подходящий параметр(ы) визуализации и тем самым наиболее подходящую обработку изображения для следующей и тем самым для всех последующих визуализируемых анатомических областей.
Устройство 10 визуализации в соответствии с изобретением может использоваться не только для адаптации обработки изображения, но также для улучшения облучения блоком 20 визуализации. Блок 20 визуализации может содержать рентгеновскую трубку, а блок 12 обработки может устанавливать параметр облучения блока 20 визуализации на основе определенной области, подлежащей последующей визуализации. Таким образом, характеристики рентгеновского пучка (например, высоковольтный генератор, предварительная фильтрация трубки) и доза (генератор мА-с) могут быть установлены на основе информации об облучаемой анатомии при следующем сборе изображения.
На Фиг.2 показан схематический обзор этапов способа визуализации объекта 30. Способ включает в себя следующие этапы, необязательно в этом порядке:
- На первом этапе S1 выдача данных о положении и ориентации объекта 30, подлежащего визуализации.
- На втором этапе S2 выдача данных о положении и ориентации блока 20 визуализации относительно области объекта 30 и скорректированных для последующей визуализации области.
- На третьем этапе S3 объединение данных о положении и ориентации объекта 30 и данных о положении и ориентации блока 20 визуализации для определения области, подлежащей последующей визуализации
- На четвертом этапе S4 установка по меньшей мере одного параметра визуализации блока 20 визуализации на основе определенной области, подлежащей последующей визуализации.
- На необязательном пятом этапе S5 визуализация определенной области, подлежащей последующей визуализации.
В другом примерном варианте осуществления настоящего изобретения предусмотрена компьютерная программа или элемент компьютерной программы, которая характеризуется тем, что она предназначена для выполнения этапов для способа согласно одному из предыдущих вариантов осуществления на соответствующей системе.
Поэтому элемент компьютерной программы может быть сохранен в вычислительном блоке, который также может быть частью варианта осуществления настоящего изобретения. Этот вычислительный блок может выполнен с возможностью исполнять или вызывать исполнение этапов способа, описанного выше. Кроме того, он может быть выполнен с возможностью работы компонентов описанного выше устройства. Вычислительный блок может быть выполнен с возможностью работы автоматически и/или выполнения команд пользователя. Компьютерная программа может быть загружена в оперативную память процессора обработки данных. Процессор обработки данных, таким образом, может быть предусмотрен для выполнения способа согласно изобретению.
Этот примерный вариант осуществления изобретения охватывает как компьютерную программу, которая с самого начала применяется в изобретении, и компьютерную программу, которая посредством обновления превращает существующую программу в программу, используемую в изобретении.
Далее, элемент компьютерной программы может быть способен обеспечить все необходимые этапы для выполнения процедуры примерного варианта осуществления способа как описано выше.
В соответствии с еще одним примерным вариантом осуществления настоящего изобретения предусмотрен машиночитаемый носитель, такой как CD-ROM, причем машиночитаемый носитель содержит сохраненный на нем элемент компьютерной программы, причем этот элемент компьютерной программы описан в предыдущем разделе.
Компьютерная программа может сохраняться и/или распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемые вместе с или как часть другого аппаратного обеспечения, но также могут распространяться в других формах, как через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Однако компьютерная программа может быть также предоставлена через сеть, такую как всемирная компьютерная сеть и может быть загружена в оперативную память процессора обработки данных из такой сети. Согласно еще одному примерному варианту осуществления настоящего изобретения предусмотрен носитель для создания элемента компьютерной программы, доступного для скачивания, причем элемент компьютерной программы выполнен с возможностью исполнения способа в соответствии с одним из описанных выше вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описаны в отношении различных предметов изобретения. В частности, некоторые варианты осуществления описаны в отношении пунктов формулы изобретения, описывающих способы, тогда как другие варианты осуществления описаны в отношении пунктов формулы изобретения, описывающих устройства. Однако специалист в области техники поймет из приведенного выше и нижеследующего описания, что, пока не указано иное, в дополнение к любому сочетанию признаков, принадлежащих объекту изобретения одного рода, любое сочетание признаков, относящихся к различным объектам изобретения, также полагается раскрытым в этой заявке. Тем не менее, все признаки могут быть объединены, обеспечивая синергетический эффект, который больше, чем простое суммирование признаков.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и предшествующем описании, такие иллюстрации и описание должны рассматриваться как иллюстративные или приведенные в качестве примера, а не ограничивающие. Изобретение не ограничивается описанными вариантами осуществления. Изучив чертежи, раскрытие и приложенную формулу изобретения, специалисты в области техники смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления.
В формуле изобретения слово «содержит» не исключает других элементов или этапов, а формы единственного числа не исключают множественного числа. Один процессор или другой блок может выполнить функции нескольких пунктов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно отличных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя использовать с выгодой. Любые ссылочные позиции в формуле изобретения не должны рассматриваться в качестве ограничения объема.

Изобретение относится к области медицинской техники. Устройство (10) для визуализации объекта (30) содержит: блок (11) обеспечения и блок (12) обработки, причем блок (11) обеспечения выполнен с возможностью выдачи данных о положении и ориентации объекта (30), подлежащего визуализации, причем блок (11) обеспечения дополнительно выполнен с возможностью выдачи анатомической модели объекта (30), имеющей один или более анатомических ориентиров, и выдачи данных о положении и ориентации объекта путем объединения анатомической модели и одного или более анатомических ориентиров, причем блок (11) обеспечения дополнительно выполнен с возможностью выдачи данных о положении и ориентации блока (20) визуализации, скорректированных для последующей визуализации области объекта (30), подлежащей визуализации, причем блок (12) обработки дополнительно выполнен с возможностью объединения данных о положении и ориентации объекта (30) и данных о положении и ориентации блока (20) визуализации для определения области, подлежащей последующей визуализации, и причем блок (12) обработки дополнительно выполнен с возможностью установки по меньшей мере одного параметра визуализации блока (20) визуализации на основе определенной области, подлежащей последующей визуализации. Причем устройство отличается тем, что анатомическая модель предварительно выбирается из группы анатомических моделей на основе предыдущего изображения области, подлежащей последующей визуализации. Система (1) визуализации объекта (30) содержит: блок (20) визуализации и устройство (10) для визуализации объекта (30), причем по меньшей мере один параметр визуализации блока (20) визуализации установлен на основе области, определенной устройством (10) визуализации, подлежащей последующей визуализации. Способ визуализации объекта (30), содержащий следующие этапы: а) выдача данных о положении и ориентации объекта (30), подлежащего визуализации, b) предварительный выбор анатомической модели из группы анатомических моделей на основе предыдущего изображения области, подлежащей последующей визуализации, причем такая анатомическая модель имеет один или более анатомических ориентиров, с) выдача данных о положении и ориентации объекта путем объединения анатомической модели и одного или более анатомических ориентиров, d) выдача данных о положении и ориентации блока (20) визуализации, скорректированных для последующей визуализации упомянутой области, е) объединение данных о положении и ориентации объекта (30) и данных о положении и ориентации блока (20) визуализации для определения области, подлежащей последующей визуализации, и f) установка по меньшей мере одного параметра визуализации блока (20) визуализации на основе определенной области, подлежащей последующей визуализации. Машиночитаемый носитель для управления устройством или системой для визуализации объекта выполнен с возможностью сохранения на нем элемента компьютерной программы для управления устройством или системой посредством блока обработки для исполнения этапов способа. Технический результат заявленного изобретения заключается в улучшении обработки изображения. 4 н. и 8 з.п. ф-лы, 2 ил.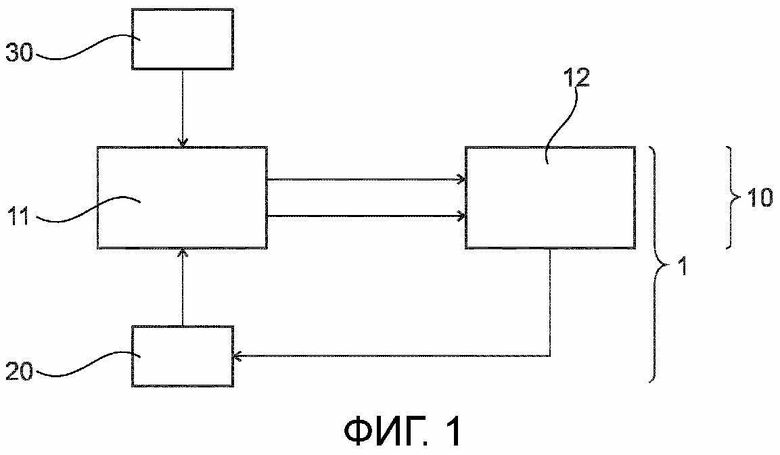
1. Устройство (10) для визуализации объекта (30), содержащее: блок (11) обеспечения и блок (12) обработки, причем блок (11) обеспечения выполнен с возможностью выдачи данных о положении и ориентации объекта (30), подлежащего визуализации, причем блок (11) обеспечения дополнительно выполнен с возможностью выдачи анатомической модели объекта (30), имеющей один или более анатомических ориентиров, и выдачи данных о положении и ориентации объекта путем объединения анатомической модели и одного или более анатомических ориентиров, причем блок (11) обеспечения дополнительно выполнен с возможностью выдачи данных о положении и ориентации блока (20) визуализации, скорректированных для последующей визуализации области объекта (30), подлежащей визуализации, причем блок (12) обработки дополнительно выполнен с возможностью объединения данных о положении и ориентации объекта (30) и данных о положении и ориентации блока (20) визуализации для определения области, подлежащей последующей визуализации, и причем блок (12) обработки дополнительно выполнен с возможностью установки по меньшей мере одного параметра визуализации блока (20) визуализации на основе определенной области, подлежащей последующей визуализации, отличающееся тем, что анатомическая модель предварительно выбирается из группы анатомических моделей на основе предыдущего изображения области, подлежащей последующей визуализации.
2. Устройство (10) по п. 1, причем объект (30), подлежащий визуализации, является пациентом, а область, подлежащая последующей визуализации, является анатомической областью.
3. Устройство (10) по п. 1 или 2, причем блок (11) обеспечения выполнен с возможностью выдачи данных о положении и/или ориентации блока (20) визуализации относительно области объекта, подлежащего визуализации.
4. Устройство (10) по одному из предшествующих пунктов, причем блок (11) обеспечения дополнительно выполнен с возможностью обнаружения положений и/или ориентаций анатомических ориентиров и данных пациента, собранных с помощью 2D и/или 3D оптических, видео, инфракрасных и/или ультразвуковых средств.
5. Устройство (10) по одному из предшествующих пунктов, причем анатомическая модель предварительно выбирается из группы анатомических моделей на основе данных пациента.
6. Устройство (10) по одному из предшествующих пунктов, причем анатомическая модель выполнена как адаптированная анатомическая модель на основе данных пациента и/или на основе предыдущего изображения области, подлежащей последующей визуализации.
7. Устройство (10) по одному из предшествующих пунктов, причем данные о положении и ориентации блока (20) визуализации содержат положение и ориентацию рентгеновской трубки, рентгеновского детектора или коллиматора.
8. Устройство (10) по одному из предшествующих пунктов, причем блок (12) обработки дополнительно выполнен с возможностью устанавливать параметр облучения блока (20) визуализации на основе определенной области, подлежащей последующей визуализации.
9. Система (1) визуализации объекта (30), содержащая: блок (20) визуализации и устройство (10) для визуализации объекта (30) по одному из предшествующих пунктов, причем по меньшей мере один параметр визуализации блока (20) визуализации установлен на основе области, определенной устройством (10) визуализации, подлежащей последующей визуализации.
10. Способ визуализации объекта (30), содержащий следующие этапы: а) выдача данных о положении и ориентации объекта (30), подлежащего визуализации, b) предварительный выбор анатомической модели из группы анатомических моделей на основе предыдущего изображения области, подлежащей последующей визуализации, причем такая анатомическая модель имеет один или более анатомических ориентиров, с) выдача данных о положении и ориентации объекта путем объединения анатомической модели и одного или более анатомических ориентиров, d) выдача данных о положении и ориентации блока (20) визуализации, скорректированных для последующей визуализации упомянутой области, е) объединение данных о положении и ориентации объекта (30) и данных о положении и ориентации блока (20) визуализации для определения области, подлежащей последующей визуализации, и f) установка по меньшей мере одного параметра визуализации блока (20) визуализации на основе определенной области, подлежащей последующей визуализации.
11. Способ визуализации объекта (30) согласно предыдущему пункту, дополнительно содержащий этап е) визуализации определенной области, подлежащей последующей визуализации.
12. Машиночитаемый носитель для управления устройством или системой для визуализации объекта, выполненный с возможностью сохранения на нем элемента компьютерной программы для управления устройством или системой по одному из пп. 1-9 посредством блока обработки для исполнения этапов способа по п. 10 или 11.
| DE 102012201798 A1, 08.08.2013 | |||
| WO 2014033614 A1, 06.03.2014 | |||
| WO 2012127117 A1, 27.09.2012 | |||
| US 6334708 B1, 01.01.2002 | |||
| US 7627084 B2, 01.12.2009 | |||
| US 7873403 B2, 18.01.2011. |

