Изобретение относится к машиностроению, а именно к механизмам прессов, создаваемых на основе преобразования вращательного движения в поступательное.
Известен механизм компрессора ([1], стр.102, рис.2.144), он состоит из трехпарного кривошипа, двух шатунов и двух ползунов. Этот механизм компрессора воздействует на агент (газ), заключенный между ползунами, которые могут сближаться друг относительно друга.
Наиболее близким к предлагаемому является рычажный преобразователь усилий [2], который состоит из треугольного кривошипа, двух шатунов и двух ползунов, имеющих возможность движения в параллельных направляющих, дополнительный ползун, образующий с жестко соединенной с одним из ползунов направляющей поступательную кинематическую пару и связанный шатуном со вторым ползуном, при этом первый и дополнительный ползуны являются опорами для помещения между ними объекта прессования.
Недостатком такого механизма является то обстоятельство, что три ползуна, образующие с соответствующими направляющими поступательные кинематические пары, не могут быть уравновешены от действующих сил относительно плоскости вращения кривошипа, что приводит к уменьшению максимального усилия, оказываемого на объект.
Задачей предлагаемого изобретения является обеспечение максимального усилия, оказываемого на объект, вследствие расположения дополнительного шатуна и нагружающего ползуна симметрично относительно осей вращения.
Сущность изобретения заключается в том, что предлагается кривошипно-ползунный механизм пресса, содержащий кривошип, выполненный в форме треугольника, два ползуна, связанные с кривошипом посредством двух шатунов и образующие с направляющими кинематические пары, и дополнительный ползун, связанный с одним из ползунов посредством дополнительного шатуна, при этом каждый из ползунов образует с направляющими две цилиндрические кинематические пары, а дополнительные ползун и шатун расположены симметрично относительно осей указанных цилиндрических кинематических пар.
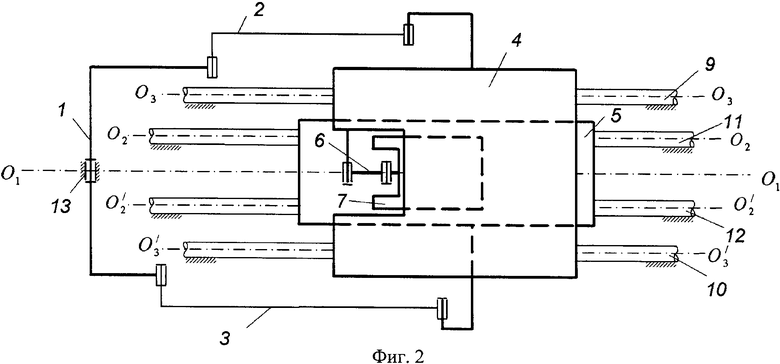
На фиг.1 показано некоторое промежуточное положение предлагаемого кривошипно-ползунного механизма пресса.
На фиг.2 показан вид сверху.
Механизм содержит треугольный кривошип 1, шатуны 2 и 3, ползуны 4 и 5, соединенные с соответствующими цилиндрическими направляющими 9, 10, 11 и 12, геометрические оси которых соответственно О3, O3', О2, и O'2, дополнительный шатун 6 и дополнительный ползун 7, соединенный с направляющей 8, стойку 13, относительно которой осуществляется вращение кривошипа 1, объект прессования 14.
Подвижность системы можно доказать по формуле Чебышева П.Л. [3], форм. 2.8:
W=3n-2p5-p4,
где W - подвижность механизма; n - число подвижных звеньев; p5 - число одноподвижных кинематических пар, р4 - число двухподвижных кинематических пар.
В предлагаемом механизме семь подвижных звеньев: кривошип 1, шатуны 2 и 3, ползуны 4 и 5, дополнительный шатун 6 и дополнительный ползун 7, т.е. n=7. Восемь одноподвижных кинематических пар: связь кривошипа со стойкой, двух шатунов с кривошипом и с ползунами, связь дополнительного шатуна с ползуном 4 и дополнительным ползуном 7, связь дополнительного ползуна и направляющей 8, т.е. p5=8. Четыре двухподвижные кинематические пары и связь ползунов 4 и 5 с цилиндрическими направляющими 9, 10, 11 и 12, т.е. р4=4. Так как n=7, p5=8, а р4=4, то W=3·7-2·8-4=21-16-4=1, система является работоспособной.
Работает механизм следующим образом: при задании вращательного движения кривошипу 1, ползуны 4 и 5 через шатуны 2 и 3 начинают двигаться поступательно вдоль соответствующих цилиндрических направляющих 9, 10, 11 и 12, при этом дополнительный ползун 7 через шатун 6 сместится вдоль направляющей 8, выполненной совместно с ползуном 5, на расстояние, необходимое для воздействия на объект прессования 14 согласно технологической операции.
Источники информации
1. Кожевников С.Н. и др. Механизмы. - М.: Машиностроение, 1965 г. - 650 с.
2. Патент №2123428. Рычажный преобразователь усилий. Дворников Л.Т., Аронов М.А., Мальцев С.В. Бюл. №35, 1998.
3. Артоболевский И.И. Теория механизмов и машин. М.: Наука, 1988 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПРЕСС КРИВОШИПНЫЙ С КЛИНОВЫМ ПРИВОДОМ | 2000 |
|
RU2194621C2 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
| Двухтактный поршневой двигатель внутреннего сгорания и способ его работы | 2019 |
|
RU2729562C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2020 |
|
RU2739104C1 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2020 |
|
RU2739105C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ПРЕССА | 2008 |
|
RU2378118C1 |
| УРАВНОВЕШЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2583329C2 |
Изобретение относится к машиностроению и может быть использовано в механизмах прессов, предназначенных для преобразования вращательного движения в поступательное. Кривошипно-ползунный механизм пресса содержит кривошип в форме треугольника и три ползуна. Два ползуна связаны с кривошипом посредством двух шатунов. Каждый из этих двух ползунов образует с направляющими две цилиндрические кинематические пары. Третий ползун связан с одним из двух ползунов с помощью дополнительного шатуна. Третий ползун и дополнительный шатун расположены симметрично относительно осей указанных цилиндрических кинематических пар. В результате обеспечивается воздействие на объект максимальным усилием. 2 ил.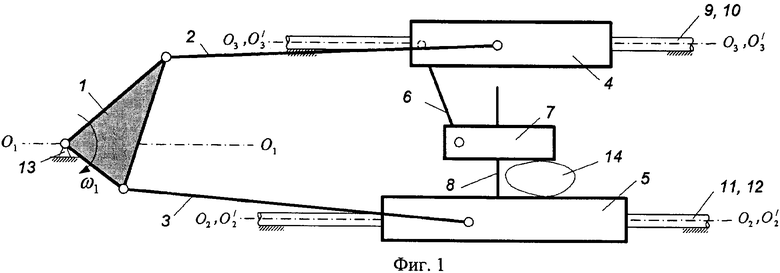
Кривошипно-ползунный механизм пресса, содержащий кривошип, выполненный в форме треугольника, два ползуна, связанные с кривошипом посредством двух шатунов и образующие с направляющими кинематические пары, и дополнительный ползун, связанный с одним из ползунов посредством дополнительного шатуна, отличающийся тем, что каждый из двух ползунов образует с направляющими две цилиндрические кинематические пары, а дополнительные ползун и шатун расположены симметрично относительно осей указанных цилиндрических кинематических пар.
| РЫЧАЖНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ | 1997 |
|
RU2123428C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2001 |
|
RU2201348C1 |
| Кривошипно-ползунный механизм | 1990 |
|
SU1728562A1 |
| US 3696657 A, 10.10.1972 | |||
| US 5720201 A, 24.02.1998. | |||

