1131
Изобретение относится к машинотроению, а именно к пространственым шарннрно-рычажным механизмам и ожет быть использовано в кинематиеских схемах манипуляторов, устройтв ДЛЯ обработки криволинейных поерхностей и других механизмов.
Цель изобретения - расширение кинематических возможностей, механизма утем обеспечения различньпс видов вижения ведомого звена.
На чертеже изображена кинематическая схема механизма.
Механизм содержит основание I, шарнирно связанный с ним ведущий кривошип 2, который посредством шатуна
3кинематически связан с ведомым звеном 4. С ведомым звеном 4 посредством шатуна 5 кинематически связан второй ведущий кривошип 6, шарнирно связанный с основанием 1. Ведущие кривошипы 2 и 6 и соответствующие им шатуны 3 и 5 вместе с ведомым звеном
4образуют первый шарнирно-рычажный контур,
Шарнирно связанный с основанием ведущий кривошип 7 посредством шатуна 8 кинематически связан с. выходным звеном 9 второго аналогичного по структуре первому шарнирно-рычажного контура. С выходным звеном 9, посредством шатуна 10.кинематически свяэай ведущий кривошип 11j шарнирно уста- новленньй на основании 1.
Ведомое звено 4 первого шарнирно- рычажного контура посредством сферического шарнира установлено на основании 1. С ведомым звеном 1 первого шарнирно-рьгчажного контура посредством сферического шарнира последовательно связано ведомое звено 9 второго шарнирно-рычажного контура.
Последовательным соединением посредством сферических шарниров ведомых звеньев аналогичных по структуре юарнирно-рычажнькк контуров можно производить дальнейшее развитие структуры механизма.,
Кинематическая связь ведущих кривошипов с соответствующими шатунами и ведомыми звеньями может быть выполнена в виде шарниров Гуна апи сферических шарниров с пальцами, а сферические шарниры механизма могут быть выполнены в виде трех подвижных сферических соединений,
К вь(ходному звену 9 второго шарнирно-рьгчажного контура, являющемуся
8;
выходным звеном всего механизма, мо-, жег быть присоединен рабочий орган ( захват ) м анипулятора, рабочий ин- струмент или антенна в зависимости
от функционального назначения устройства, содержащего данный механизм.
Механизм работает следующим образом.
При вращении ведущих кривошипов
2, 6, 7 и 11 любая точка, расположенная на ведомом звене 9, совершает сложное движение, являющееся результатом сложения сферических движений ведомого звена 4 и ведомого звена 9,
Размеры рабочего объема механизма определяются максимальными телесными углами, описываемыми при сферических движениях ведомых звеньев 4 и 9, допускаемых кинематическими связями.
При этом первьй шарнирно-рычажный контур обеспечивает вьгход ведомого звена 4 в нужную зону, а второй шарнирно-рычажный контур,, управление которым аналогично управлению первого, обеспечивает коррекцию положения посредством поворота ведомого звена 9 с рабочим органом. Тем самым повьшгается точность выхода рабочего органа в задаггаое положение. Механизм при различных сочетаниях размеров звеньев только за счет системы управления может осуществлять различные стереотипные движения рабочего органа: поступательное движение, движение по дуге и движение с сохранением неизменным положения одной из осей рабочего органа.
При неподвижном ведомом звене ведомое звено 9 приводится в сфери- ческое движение с помощью ведущих кривошипов 7 и 11, соединенных при помощи шатунов 8 и Ю С ведомым звеном 9 второго шарнирно-рычажного контура ,
Наличие двух аналогичных по структуре яарнирно-рычажных контуров в механизме позволяет иметь общее матеатическое и программное обеспечение управления ими. Кроме того, пця применении многозвенного пространственного механизма в качестве привода
манипулятора кинематические цепи,
образующие шарнирно-рычажные контуры, располагаются по разные стороны от основания, что обеспечивает взаимное их уравновешивание.
ормула и
3
3 о б р
13
е т е н и я
1. Многозвенный пространственный механизм, содержащий основание, кинематически связанные с ним по меньшей мере два последовательно соединенных аналогичных по структуре шарнирно- рычажных контура, каждый из которых включает два веду1оих кривошипа, соответствующиег им шатуны и ведомое звено, отличающийся тем что, с целью расширения кинематичес- ких возможностей путем обеспечения различных видов движения ведомого звена, связь ведомого звена каяадого
1312288
последующего контура с ведомым звеном предьщущего контура выполнена в виде сферического шарнира, ведомое звено первого контура связано с основанием посредством сферического шарнира, а ведущие кривошипы всех контуров шарнирно связаиы с основанием.
2.. Механизм поп.1, отличаю щ и и с я тем, что связи ведомых . звеньев каждого контура с шатунами и шатунов с соответствующими ведущими кривошипами выполнены в виде сфе- . рических шарниров с пальцами или шарнНров Гука.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2760516C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ | 2023 |
|
RU2810882C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
Изобретение относится к машиностроению, а тленно к пространственным шарнирно-рычажным механизмам. 11ель изобретения- - повышение кинематических возможностей путем обеспечения различных видов движения ведомого звена. По меньшей мере два аналогич-г ных по структуре шарнирио-рычажных контура последовательно связаны ведомыми звеньями 4 и 9.; Связь между этими званьями вьтолнена :в виде све- рического шарнира. Ведущие кривошипы 2, 6, 7 и II каждого из контуров шар- нирно установлены на основании I. Ведомое звено 4 первого контура, связанное с основанием 1 посредством сферического шарнира кинематически связано с ведущими кривошипакт 2 и 6 посредством шатуиов 3 и 5, а ведомое звено 9 второго контура кинематически связано с ведущими кривошипами 7 и И шатунами 8 и 10. При вращении ведущих кривошипов 2, 6, 7 и 11 ведомое звено 9 механизма сове{ бает слож ное движение, являющееся результатом сложения двух сферических движений ведомых звеньев 4 и 9. 1 з.п. ф-лы, 1 ил. л : (Л с со кэ 1C 00 00 /7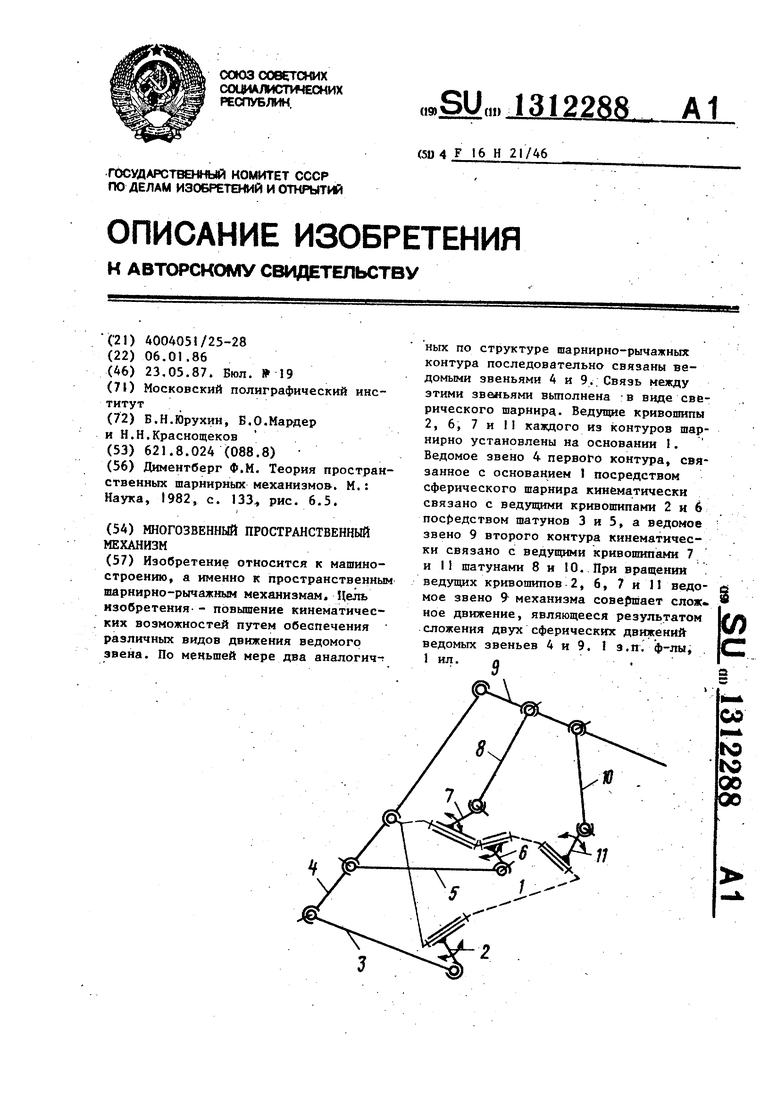
| Диментберг Ф.М | |||
| Теория пространственных шарнирных мехаиизмо | |||
| И.: Наука, 1982, с | |||
| Топочная решетка для многозольного топлива | 1923 |
|
SU133A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
