Изобретение относится к области космической техники и может быть использовано для удержания космического аппарата (КА) в заданном диапазоне географических долгот на период нахождения в орбитальном резерве. Такая задача возникает после запуска нового КА в конце срока активного существования предыдущего. В этом случае новый КА переводится в орбитальный резерв, а предыдущий КА дорабатывает свой срок и уводится с орбиты по соответствующим показаниям.
Введем понятия срока невостребованности и периода резервирования. Срок невостребованности - это время, в течение которого резервный КА, уже выведенный на квазистационарную орбиту, не должен быть задействован по целевому назначению. В этот срок входит этап приведения КА на расчетную стартовую позицию резервирования (СПР) и период резервирования - время, в течение которого КА осуществляет пассивный дрейф от СПР до рабочей орбитальной позиции.
Из уровня техники известны два способа резервирования КА на геостационарной орбите.
Способ 1. Удержание КА на рабочей позиции. Коррекции удержания по долготе и широте проводятся в полном объеме. Полезная нагрузка отключена. Такой способ называется «горячим» резервированием.
Способ малоэффективен, поскольку:
- если КА, стоящий на данной орбитальной позиции, вышел из строя, его надо немедленно заменять на новый, поэтому срок начала «горячего» резервирования определен быть не может, а если старый КА еще работает и срок его активного существования не вышел, то держать новый КА рядом со старым и не работать новым по целевому назначению нелогично;
- хотя КА не работает по целевому назначению, все остальные системы его жизнеобеспечения, особенно системы коррекции и ориентации, функционируют, растрачивая свой ресурс;
- возникает задача коллокации - пребывания двух и более геостационарных КА на одной орбитальной позиции.
Тем не менее, «горячее» резервирование применяется, когда избыточность орбитальной группировки желательна. Примером тому может быть система ГЛОНАСС.
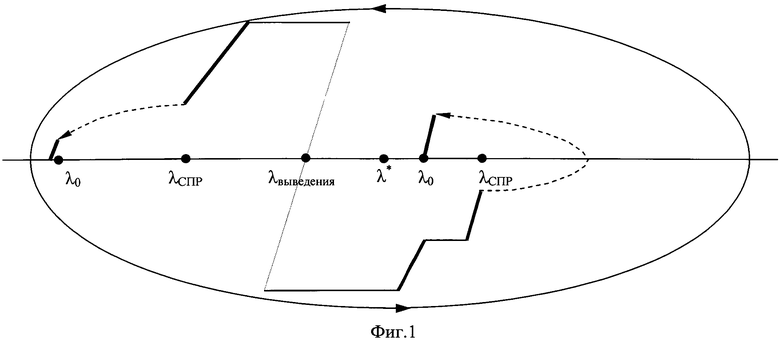
Способ 2. Вновь запущенный на геостационарную орбиту КА переводится (или прямо выводится) в окрестность ближайшей из точек устойчивого равновесия (75° в.д.; 105° з.д.) (операция 1) с периодом обращения, близким к звездным суткам, с наклонением и долготой восходящего узла орбиты выведения, позволяющим наклонению в дальнейшем, до окончания периода резервирования КА, являющегося конечным для гарантированного срока невостребованности КА, самому эволюционировать до нуля (Г.М. Чернявский, В.А. Бартенев, В.А. Малышев. Управление орбитой стационарного спутника. М.: Машиностроение, 1984 г., стр.42, 43, 134-136). Наклонение на момент выведения на геостационарную должно быть близко суммарному изменению наклонения под действием пассивных сил в течение предполагаемого срока невостребованности. Долгота восходящего узла орбиты выведения должна быть порядка 270°, в этом случае наклонение орбиты КА по окончании периода резервирования обязательно уменьшится до нуля. Удержание КА по долготе и широте на этих резервирующих позициях не проводится. Бортовой комплекс управления функционирует. Полезная нагрузка отключена. Регулярно проводятся траекторные измерения.
Точка устойчивого равновесия характерна тем, что суточные приращения периода обращения КА за счет суммарного воздействия гармоник разложения геопотенциала равны нулю.
Для завершения этапа орбитального резервирования КА переводится на рабочую позицию согласно штатному плану разгонных и тормозных коррекций (операция 2).
Способ 2 взят за прототип.
Недостатком способа-прототипа является то, что переводы по долготе - всегда затраты рабочего тела на проведение коррекций разгона и торможения КА вдоль орбиты. Суммарное приращение скорости на переводы КА из точки выведения в точку резервирования и из точки резервирования на рабочую позицию оценивается в (0-11,5)м/с. Это соответствует до 2,6 месяцам функционирования КА по целевому назначению в узкой области по долготе и широте из расчета лишь экономных скоростей всех дрейфов КА по долготе - менее 1% сутки. К тому же резервировать в точках устойчивого равновесия небезопасно, т.к. эти точки являются местом захоронения многих геостационарных КА и вероятность столкновения с одним из таких КА достаточно высока.
Целью изобретения является экономия рабочего тела системы коррекции и сокращение времени замены отработавшего КА новым до технического минимума, определяемого погрешностью определения срока невостребованности КА.
Поставленная цель достигается тем, что в способе резервирования КА на геостационарной орбите, включающем определение срока резервирования, выведение КА на геостационарную орбиту в расчетную точку согласно схеме выведения с начальным наклонением и долготой восходящего узла орбиты КА, позволяющими за счет эволюции получить наклонение к концу срока резервирования, близкое к нулю, введены новые операции, заключающиеся в том, что определяют требуемое отклонение стартовой позиций резервирования (СПР) от долготы рабочей позиции по соотношению:

где Δλ - требуемое отклонение;
t - планируемый период резервирования, сутки;
 - долготное ускорение;
- долготное ускорение;
 - скорость дрейфа по долготе в начале срока резервирования;
- скорость дрейфа по долготе в начале срока резервирования;
 - скорость дрейфа по долготе в конце срока резервирования;
- скорость дрейфа по долготе в конце срока резервирования;

a cm - большая полуось квазистационарной орбиты, км;
ΔU(λ0) - возмущающий геопотенциал на долготе рабочей позиции;
ΔU(λСПР) - возмущающий геопотенциал на долготе СПР,
определяют требуемый начальный сидерический период обращения КА на СПР по соотношению:

где  - среднее движение, с-1;
- среднее движение, с-1;
Tзв - звездные сутки, 86164 с;
λ* - долгота ближайшей точки устойчивого равновесия, в.д.,
приводят КА на выбранную СПР по периоду и долготе; переводят КА в режим аппаратной закрутки, при подходе на рабочую позицию КА выводят из закрутки и, при необходимости, проводят уточняющие коррекции векторов наклонения и эксцентриситета согласно условиям коллокации.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций.
1. Определение срока орбитального резервирования КА.
Операция заключается в вычитании из гарантированного срока невостребованности КА времени приведения на СПР.
2. Определение требуемого отклонения СПР от долготы рабочей позиции.
Расчет Δλ и ΔT по формулам (1)-(3).
В отношении формулы (2). Из всего спектра возмущений, не в ущерб точности, выбираем возмущения, оказывающие доминирующее влияние на движение КА по долготе, которые затем представляем функцией гринвичской долготы. Движение КА в поле притяжения Земли можно описать формулой:

где r - радиус орбиты, км;
g - ускорение силы тяжести в точке [λ;φ], км/с2;
U - гравитационный потенциал Земли, км2/с2.
Тогда величину трансверсальной составляющей ускорения КА в плоскости экватора (φ=0) запишем следующим образом:

где ΔU - возмущающий геопотенциал, км2/с2:

где µ - гравитационный параметр Земли, 398600 км3/с2;
Rэ - экваториальный радиус Земли, 6378 км;
Pnm(sin φ) - присоединенные сферические функции для широты φ;
cnm, dnm - гармонические коэффициенты.
Как показывает практика, при решении дифференциальных уравнений применительно к геостационарной орбите достаточно учитывать гармоники разложения с индексами не выше 44. Возмущающий геопотенциал тогда можно получить из уравнения (4), подставляя в него значения присоединенных сферических функций для широты φ=0 и принимая r=rcm=acm, поскольку для СПР большая полуось (acm) орбиты КА отличается от радиуса (rcm=42164 км) стационарной орбиты не более чем на 0,08%:

Трансверсальное ускорение (5) равно сумме трансверсальных составляющих ускорений, вызываемых гармониками разложения, и из рассмотрения уравнений (5) и (7) видно, что gT(c20)=0 и gT(c40)=0.
Угловая скорость движения относительно поверхности Земли равна разности угловых скоростей на стационарной и околостационарной орбитах:

Продифференцируем (8):

Для круговой орбиты запишем уравнение Ньютона возмущенного движения для большой полуоси:

Тогда уравнение (9) с учетом (10) и (5) запишем в виде:

Умножим левую и правую части уравнения (11) на  Тогда левая часть представляет собой полный дифференциал от
Тогда левая часть представляет собой полный дифференциал от  по t, а правая часть - полный дифференциал от
по t, а правая часть - полный дифференциал от
Будем иметь, при скорости изменения гринвичской долготы  на долготе рабочей позиции:
на долготе рабочей позиции:

При 

Введем обозначение:

Тогда уравнение (12) после несложных преобразований представим в следующем виде:
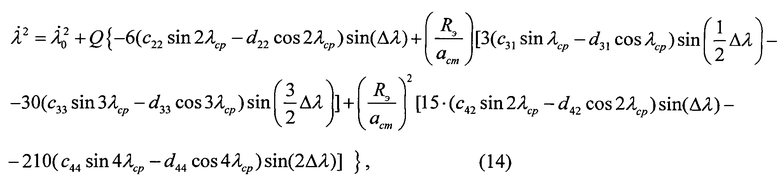
где  - среднее значение гринвичской долготы между долготой рабочей позиции (λ0) и долготой СПР (λСПР),
- среднее значение гринвичской долготы между долготой рабочей позиции (λ0) и долготой СПР (λСПР),
Δλ=λ0-λСПР
Выражение, стоящее в фигурных скобках, имеет постоянное значение при заданной средней долготе. Его произведение на Q обозначим через R. Тогда уравнение (14) представим кратко формулой:

Суточное изменение гринвичской долготы подспутниковой точки носит равнопеременный характер, откуда следует соотношение:

При 

Далее,

Подставляя в (17)  из (16), будем иметь:
из (16), будем иметь:

При  имеем соотношение:
имеем соотношение:

Сидерический период, соответствующий положению КА на СПР (период при пассивном приходе КА на рабочую позицию принимается равным звездным суткам), определяется из соотношения:

откуда

В уравнении (3), (20) знак (λ0-λ*) регулирующий.
Следует отметить, что для многих СПР можно пользоваться более простой формулой, зная, что при разнесении долгот рабочей позиции и СПР на 45° ошибка в замене sin(kΔλ) в уравнении (14) на kΔλ составит не более 8%. Но для расчета отклонения области возможных СПР от долготы рабочей позиции по формуле (1) даже такая точность более чем приемлема.
3. Вывод КА на геостационарную орбиту.
Эта операция аналогична операции 1 прототипа в части выведения. Следует отметить, что современные средства выведения способны выводить КА в любую точку геостационарной орбиты с любым приемлемым для штатного функционирования наклонением орбиты. Однако дискрет временных уставок выведения не позволяет провести точное выведение на расчетные параметры конечной орбиты. По наклонению ошибка выведения составляет (0,1-0,2)°, по периоду до 500 с, по эксцентриситету до 3,5·10-3. Следовательно, следующая операция 4 необходима, даже если собираемся выводить КА не прямо на СПР, а в некоторую штатную точку выведения (контакта отделения).
4. Приведение (устранение ошибки выведения) КА на СПР.
Эта операция аналогична операции 1 прототипа в части приведения.
5. Перевод КА в дежурный режим.
Это стандартная операция. Дежурный режим подразумевает работу бортового комплекса управления, выключенную полезную нагрузку и минимальный расход ресурсов всех уровней на борту КА. Эта операция аналогична операции 1 прототипа в части бортового комплекса управления, полезной нагрузки и расхода бортовых ресурсов.
6. Перевод КА в режим закрутки.
Операция применяется в нештатных ситуациях, чтобы обеспечить живучесть КА. Система ориентации и стабилизации (СОС) не работает: подогрев двигателей ориентации отключен, двигатели ориентации не работают, КА совершает оборот вокруг одной из своих осей за 15-20 мин.
Режим аппаратной закрутки после перевода КА в дежурный режим является логическим продолжением работы с КА в части его консервации.
В режиме аппаратной закрутки КА может существовать сколь угодно долго.
Данная операция является отличительным и функционально самостоятельным признаком заявленного изобретения, этот признак не следует явным образом из уровня техники. Этот отличительный признак ранее не применялся в практике для орбитального резервирования геостационарного КА. Данная операция, в дополнение к переходу в дежурный режим, экономит ресурс рабочего тела СОС и, что очень важно, сводит эволюционное приращение эксцентриситета орбиты практически к нулю, поскольку активная площадь панелей (среднее миделево сечение панелей) солнечной батареи (СБ) при вращении КА будет сокращена втрое по сравнению с физической площадью (S) панелей: в (А-В) раз, где  - поскольку половину времени Солнце освещает оборотную сторону панелей СБ, где коэффициент отражения стремится к нулю, B=0,64 - средний синус изменения активной площади панелей СБ. Изменение эксцентриситета, в отсутствие коррекций параметров орбит современных геостационарных КА, никогда не превышает 0,001. Из сказанного выше следует, что в течение срока резервирования эксцентриситет орбиты КА изменится не более чем на 0,00033, что предполагает штатные 1-2 коррекции эксцентриситета при функционировании КА по целевому назначению. Такие энергозатраты исчезающе малые по сравнению с суммарными энергозатратами КА в течение срока активного существования и укладываются в погрешность расчета топливного бюджета КА.
- поскольку половину времени Солнце освещает оборотную сторону панелей СБ, где коэффициент отражения стремится к нулю, B=0,64 - средний синус изменения активной площади панелей СБ. Изменение эксцентриситета, в отсутствие коррекций параметров орбит современных геостационарных КА, никогда не превышает 0,001. Из сказанного выше следует, что в течение срока резервирования эксцентриситет орбиты КА изменится не более чем на 0,00033, что предполагает штатные 1-2 коррекции эксцентриситета при функционировании КА по целевому назначению. Такие энергозатраты исчезающе малые по сравнению с суммарными энергозатратами КА в течение срока активного существования и укладываются в погрешность расчета топливного бюджета КА.
Принцип орбитального резервирования КА приведен на фиг.1.
Срок резервирования может быть любым. Максимальный срок резервирования не ограничен.
7. Вывод КА из режима закрутки после окончания пассивного дрейфа КА из СПР на рабочую позицию.
8. Проведение коррекции торможения.
Перед заключительным периодом резервирования (коррекциями торможения) требуется выполнение условия безопасного для других КА появления резервного КА на геостационарной орбите, для чего отклонение по радиусу должно быть не менее 40 км. К тому же после коррекций торможения КА, если на той же рабочей позиции находятся другие КА, должен оказаться в стороне от рабочей позиции, чтобы привести все свои орбитальные параметры в соответствие с требованиями коллокации.
9. Процесс коллокации.
Коллокация - сосуществование нескольких КА в единой области широт и долгот одной и той же орбитальной позиции. В рамках коллокации проводят коррекции векторов наклонения и эксцентриситета орбиты.
Операция необходима при наличии на данной орбитальной позиции более одного КА, включая резервируемый.
Предлагаемый способ резервирования геостационарного КА:
- при неукоснительном соблюдении планового срока вывода КА, отработавшего свой срок активного существования, практически обнуляет время замены отработавшего КА новым и, следовательно, не уступает в оперативности замены «горячему» резервированию;
- не уступает, а зачастую превосходит в качестве штатную схему ввода КА в целевое функционирование: транспортировку КА, находящегося в состоянии «холодного» резервирования, на стартовый комплекс, выведение на геостационарную орбиту и приведение КА на заданную рабочую позицию, поскольку все перечисленное можно сделать заранее в любое время или (в отношении приведения) делать частично;
- экономит рабочее тело системы коррекции, поскольку исключает большую часть расхода топлива на этап принудительного приведения КА с СПР на рабочую орбитальную позицию;
- экономит ресурс по включениям двигателей коррекции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ И ПЕРЕВОДА НА НОВУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2788555C1 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ ПОДГОТОВКИ К КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787603C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2708468C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
Изобретение относится к управлению движением геостационарных космических аппаратов (КА) в периоды резервирования и оперативного ввода в эксплуатацию. На этапе пассивного дрейфа КА из стартовой позиции резервирования (СПР) в рабочую орбитальную позицию (точку «стояния») минимизируют энергозатраты бортовых систем КА. Для этого расстояние между СПР и точкой «стояния» выбирается с учетом гарантированного срока невостребованности выводимого КА и времени приведения КА на СПР. КА переводят в дежурный режим и затем в режим аппаратной закрутки. По окончании резервирования КА выводят из режима закрутки. Техническим результатом изобретения является экономия рабочего тела системы коррекции и сокращение времени замены отработавшего КА новым до технического минимума, определяемого погрешностью определения срока невостребованности КА. 1 ил.
Способ резервирования космического аппарата (КА) на геостационарной орбите, включающий определение срока резервирования, выведение КА на геостационарную орбиту в расчетную точку согласно схеме выведения с начальными наклонением и долготой восходящего узла орбиты КА, позволяющими за счет эволюции получить наклонение к концу срока резервирования, близкое к нулю, отличающийся тем, что определяют требуемое отклонение стартовой позиции резервирования (СПР) от долготы рабочей позиции по соотношению:
где Δλ - требуемое отклонение;
t - планируемый период резервирования, сутки;
 - долготное ускорение;
- долготное ускорение;
 - скорость дрейфа по долготе в начале срока резервирования;
- скорость дрейфа по долготе в начале срока резервирования;
 - скорость дрейфа по долготе в конце срока резервирования;
- скорость дрейфа по долготе в конце срока резервирования;
acm - большая полуось квазистационарной орбиты, км;
ΔU(λ0) - возмущающий геопотенциал на долготе рабочей позиции;
ΔU(λСПР) - возмущающий геопотенциал на долготе СПР,
определяют требуемый начальный сидерический период обращения КА на СПР по соотношению:
где  - среднее движение, c-1;
- среднее движение, c-1;
Tзв - звездные сутки, 86164 с;
λ* - долгота ближайшей точки устойчивого равновесия, в.д.,
приводят КА на СПР по периоду и долготе, переводят КА в режим аппаратной закрутки, при подходе на рабочую позицию КА выводят из закрутки и, при необходимости, проводят уточняющие коррекции векторов наклонения и эксцентриситета согласно условиям коллокации.
| Г.М | |||
| ЧЕРНЯВСКИЙ, В.А | |||
| БАРТЕНЕВ, В.А | |||
| МАЛЫШЕВ | |||
| Управление орбитой стационарного спутника, М | |||
| Машиностроение, 1984 г., с.42, 43, 134-136 | |||
| PATTINSON L | |||
| EUTELSAT Satellite Collocation | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| US 3995801 A, 07.12.1976; | |||
| US 4691882 A, 08.09.1987 | |||
| US 5120007 A, 09.06.1992 | |||
| СПОСОБ УПРАВЛЕНИЯ КЛАСТЕРОМ НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ СПУТНИКОВ (ВАРИАНТЫ) | 2004 |
|
RU2284950C2 |
| СПОСОБЫ РАБОТЫ СПУТНИКОВОЙ КОММУНИКАЦИОННОЙ СИСТЕМЫ, СПОСОБ УПРАВЛЕНИЯ ЕЕ РАБОТОЙ И СИСТЕМА УПРАВЛЕНИЯ СПУТНИКОВЫМ АНТЕННЫМ ОХВАТОМ НЕГЕОСТАЦИОНАРНОЙ ОРБИТАЛЬНОЙ МНОГОСПУТНИКОВОЙ СИСТЕМЫ | 1992 |
|
RU2121225C1 |

