Изобретение относится к устройствам для транспортирования и ориентирования штучных грузов и может найти применение как средство межоперационного перемещения изделий на тележках-спутниках в гибких транспортно-технологических системах.
Известен инерционный конвейер для штучных грузов, содержащий желоб, оснащенный роликоопорами, выполненными из двух частей, каждая из которых снабжена реверсивным механизмом свободного хода, при этом реверсивные механизмы свободного хода одной части роликоопор связаны с основным исполнительным механизмом, а другой - с дополнительным, катки и привод возвратно-поступательного движения желоба [1].
Наиболее близким по техническому решению к предлагаемому является инерционный конвейер, содержащий раму, установленную на катках, привод возвратно-поступательного движения рамы, спутники, установленные на опорных роликах, оснащенные механизмами свободного хода и ловители спутников [2].
Недостатком этого устройства является невозможность ориентирования грузов при транспортировании, что сужает его технологические возможности.
Цель изобретения - обеспечение ориентирования штучных грузов.
Это достигается тем, что тележка-спутник выполнена из шарнирно соединенных между собой опорной платформы и поворотной платформы со смещенным центром тяжести, при этом на опорной платформе на осях установлены катки для опоры поворотной платформы, оснащенные механизмами свободного хода.
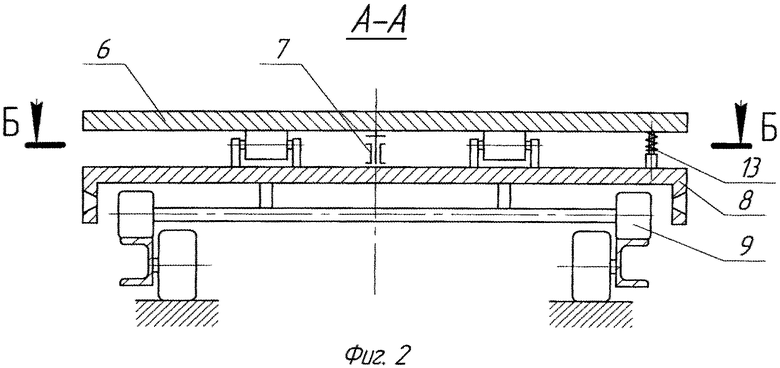
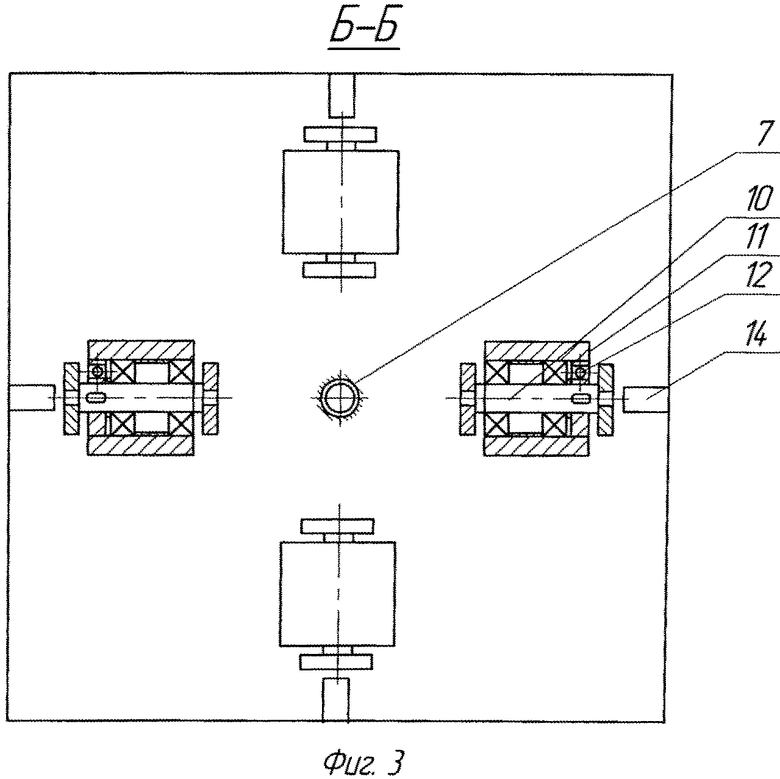
На фиг.1 изображен общий вид конвейера; на фиг.2 - сечение А-А фиг.1; на фиг.3 - сечение Б-Б фиг.2.
Инерционный тележечный конвейер состоит из установленной с возможностью возвратно-поступательного перемещения по неподвижному основанию приводной направляющей рамы 1, установленных на опорных катках 2 привода 3 рамы, ловителей 4 тележек-спутников 5, выполненных в виде поворотной платформы 6, соединенной шарниром 7 с опорной платформой 8 имеющей опорные ролики 9 с механизмами свободного хода, на которой на неподвижных осях 10 смонтированы катки 11, оснащенные механизмами свободного хода 12, при этом для фиксации положения поворотной платформы предусмотрен подпружиненный толкатель 13 и на опорной платформе имеются выемки 14.
Инерционный тележечный конвейер работает следующим образом.
Тележки-спутники 5 с закрепленными на них грузами устанавливаются на направляющие рамы 1, которая после включения привода 3 начинает совершать возвратно-поступательные перемещения, опираясь на неподвижное основание через опорные катки 2. При прямом ходе, т.е. когда рама 1 с тележками-спутниками 5 движется в сторону транспортирования, сила инерции груза и опорной платформы стремится вращать опорные ролики 9 в направлении, противоположном транспортированию, чему препятствуют механизмы свободного хода. При этом сила трения между опорными роликами 9 и направляющими рамы 1, преодолевая силу инерции, вовлекает в совместное движение тележку-спутник. Кроме того, сила инерции груза стремится также вращать катки 11 в направлении, противоположном транспортированию, но так как катки одной пары, расположенные на одной геометрической оси, имеют возможность вращаться только в разные стороны посредством механизмов свободного хода 12, то между заторможенным катком и поворотной платформой с грузом возникает сила трения, а незаторможенным - сила сопротивления качению, которая значительно меньше силы трения. Линия действия равнодействующей этих сил не совпадает с линией действия силы инерции, в результате чего возникает момент, вращающий поворотную платформу на катках с грузом. При этом имеющие возможность вращения в противоположных направлениях катки другой пары, расположенные на одной геометрической оси, параллельной оси конвейера, не препятствуют вращению поворотной платформы в сторону упомянутого возникающего момента. При обратном ходе рамы тележки-спутники под действием силы инерции груза, преодолевая сопротивление качения опорных роликов по направляющим, продолжают перемещаться в сторону транспортирования, так как механизмы свободного хода не препятствуют вращению опорных роликов по направляющим рамы, а поворотная платформа с грузом будет находиться в неподвижном повернутом положении до завершения обратного хода рамы. Далее процесс повторяется. По завершению ориентирования фиксация положения поворотной платформы осуществляется при помощи толкателя 13 и выемки в опорной платформе 14.
Применение изобретения позволит обеспечить запрограммированное движение тележек-спутников по трассе как в прямом, так и в обратном направлениях с одновременным ориентированием груза на угол до 90°, необходимыми фазами движения и остановок при постоянных колебаниях рамы, что позволит обслуживать гибкие транспортно-технологические системы и значительно расширит область применения таких конвейеров.
Источники информации
1. А.с. СССР 818988, Б.И., №13, 1981.
2. А.с. СССР 1452756, Б.И., №3, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 2004 |
|
RU2271326C2 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР | 2009 |
|
RU2406674C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ИНЕРЦИОННЫМ ПРИВОДОМ | 2009 |
|
RU2410314C2 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ НА ПОДДОНАХ | 2003 |
|
RU2238900C1 |
| Грузоведущий штанговый конвейер | 2002 |
|
RU2223904C1 |
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР С ИНЕРЦИОННЫМ ПРИВОДОМ | 2016 |
|
RU2651312C2 |
| Инерционный конвейер для штучныхгРузОВ | 1979 |
|
SU818988A1 |
| Поточно-механизированная сборочнаялиНия | 1978 |
|
SU804548A1 |
Инерционный тележечный конвейер содержит раму (1), установленную на катках (2), привод (3) возвратно-поступательного движения рамы, тележки-спутники (5), установленные на опорных катках, оснащенные механизмами свободного хода и ловители (4) тележек-спутников. Тележка-спутник выполнена из шарнирно соединенных между собой опорной и поворотной (6) платформ. На опорной платформе на осях установлены катки для опоры поворотной платформы, оснащенные механизмами свободного хода. Обеспечивается запрограммированное движение тележек-спутников по трассе как в прямом, так и в обратном направлениях с одновременным ориентированием груза на угол до 90°, необходимыми фазами движения и остановок при постоянных колебаниях рамы. 3 ил.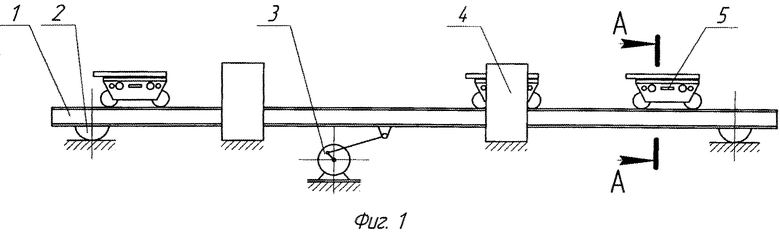
Инерционный тележечный конвейер, содержащий раму, установленную на катках, привод возвратно-поступательного движения рамы, спутники, установленные на опорных роликах, оснащенные механизмами свободного хода, и ловители спутников, отличающийся тем, что тележка-спутник выполнена из шарнирно соединенных между собой опорной платформы и поворотной платформы со смещенным центром тяжести, при этом на опорной платформе на осях установлены катки для опоры поворотной платформы, оснащенные механизмами свободного хода.
| Грузоведущий штанговый конвейер | 2002 |
|
RU2223904C1 |
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| Конвейер тележечный | 1975 |
|
SU543581A1 |

