1
Изобретение относится к устройствам для транспортировки штучных грузов и может найти применение как средство межоперационного перемещения изделий, а также для транспортировки грузов при механизации погрузочных, разгрузочных и складских работ в различных отраслях народного хозяйства.
Известны инерционные конвейеры с постоянным давлением груза на дно желоба. Желоб такого конвейера совершает прямолинейное возвратно-поступательное движение в горизонтальной плоскости, причем характер движения при прямом (в направлении транспортирования) и обратном ходах различный 1.
Наиболее близок к предлагаемому инерционный конвейер для штучных грузов, включающий желоб, оснащенный роликоопорами с механизмами свободного хода для обеспечения вращения роликоопор при холостом ходе желоба и стопорении их при рабочем ходе желоба, опорные катки и привод 2.
Эти конвейеры транспортируют груз только в одном направлении и не изменяют его положения, что сужает их технологические возможности.
Целью изобретения является расширение технологических возможностей конвейера.
Указанная цель достигается тем, что конвейер снабжен основным исполнительным механизмом, а роликоопоры снабжены реверсивными механизмами свободного хода, которые связаны с основным исполнительным механизмом. С целью ориентирования груза, конвейер снабжен дополнительным исполнительным механизмом, а роликоопоры на участке ориентирования выполнены
из двух частей, каждая из которых снабжена реверсивным механизмом свободного хода. При этом реверсивные механизмы свободного хода одной части роликоопор связаны с основным исполнительным механизмом, а другой - с дополнительным.
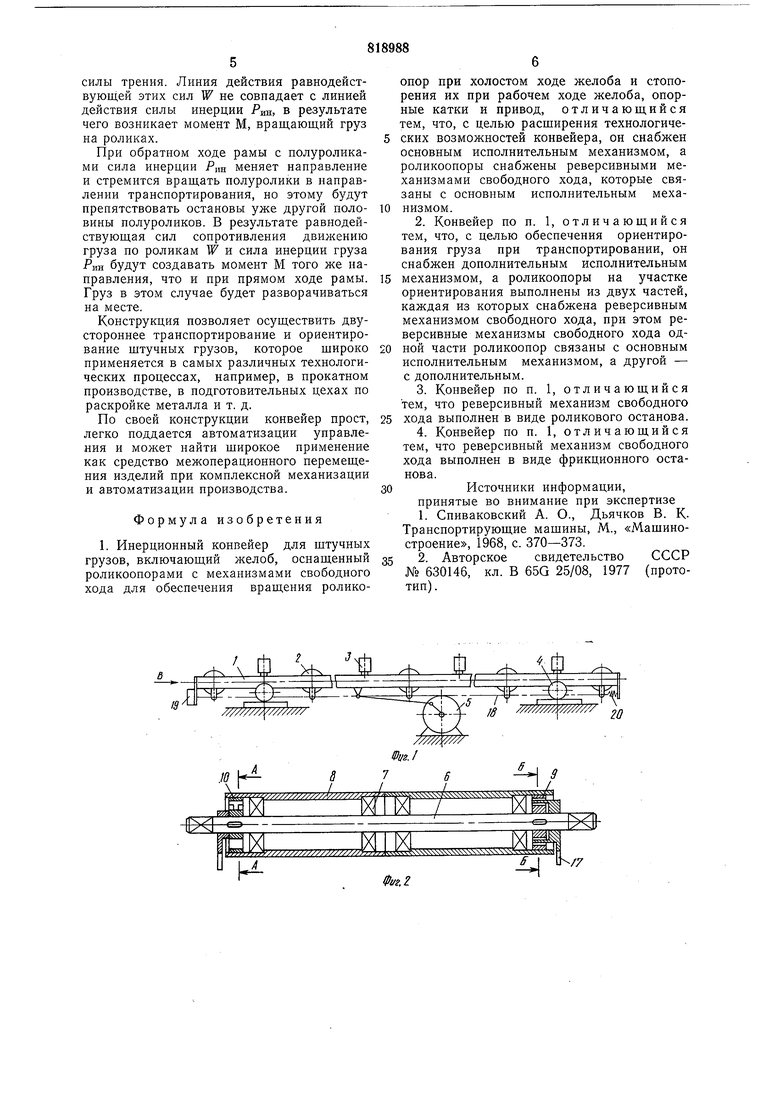
Реверсивный механизм свободного хода может быть выполнен в виде роликового или фрикционного останова. На фиг. 1 изображен общий вид конвейера; на фиг. 2 - разрез ролика конвейера; на фиг. 3 - разрез по А-А ролика с фрикционным остановом; на фиг. 4 - разрез по Б-Б ролика с роликовым остановом; на фиг. 5 - вид В фиг. 1; на фиг. изображены схемы изменения положения груза на конвейере на участках ориентирования.
Инерционный конвейер для штучных грузов содержит раму 1, на которой установлены опорные 2 и направляющие 3 ролики, опорные катки 4 и привод 5. Ролик конвейера содерл ит вал 6, неподвижно закрепленный на раме 1, на котором на опорах качения 7 вращается корпус ролика 8. Внутри ролика смонтирован управляемый реверсивный роликовый 9 или фрикционный 10 останов, включающий ступицу 11 с собачками или роликами 12, закрепленную на оси щпонкой 13, и внешнюю обойму 14, закрепленную в корпусе ролика 8. Прижатие собачек или роликов к внешней обойме осуществляется пружиной 15, управление остановом - вилкой 16, подвижно установленной на валу ролика, через рычаг 17, подключенный канатом или тягой 18 к исполнительному механизму 19. Пружина 20 обеспечивает фиксацию рычагов и применение исполнительного механизма одностороннего действия, например электромагнита. Когда рычаг 17 находится в нейтральном положении, вилка 16, как показано на фиг. 4 и 5, не касается собачек или роликов 12, которые пружиной 15 прижаты к внешней обойме; корпус ролика 8 застопорен и не может вращаться. При повороте рычага 17 вилка 16 воздействует на собачку или ролики, отводя их от внешней обоймы, в результате чего корпус ролика 8 нолучает свободу вращения в нужную сторону.
На участке конвейера, где необходимо ориентировать груз, ролики выполнены из двух частей, каждая из которых оснащена реверсивными механизмами свободного хода и установлена на одной оси (фиг. 2). Управление механизмами свободного хода одной половиной составных роликов может осуществляться тем же исполнительным механизмом, который применяется для управления механизмами свободного хода на всей длине конвейера. Для управления механизмами свободного хода второй полович ной роликов на участке ориентирования устанавливается дополнительный электромагнит, подключенный тягой или канатом к рычагам управления 17 остановов второй половины роликов. Если рычаги 17 обеих половин ролика повернуть в одном на- правлении, обе части корнуса ролика получат свободу вращения в одну и ту же сторону и будут работать как одно целое. Если рычаги 17 обеих половин повернуть в разные стороны, каждая половина корпуса ролика получит свободу вращений в противоположном друг к другу направлениях.
Для транспортировки груза включаютпривод, рама вместе с роликами совершает прямолинейное возвратно-поступательное движение в плоскости транспортирования. Исполнительные механизмы 19 через тягу 18 поворачивают рычаги 17, растормаживают остановы, обеспечивая возможность вращения корпуса ролика в направлении. При прямом ходе, т. е. когда рама 1 с роликами в сторону
транспортирования, сила инерции груза стремится вращать ролики в направлении, противоположном транспортированию, чему препятствуют остановы. При этом сила трения между роликами и грузом, преодолевая силу инерции груза, вовлекает груз в движение в сторону транспортирования. При обратном ходе рамы с роликами груз под действием силы инерции, преодолевая
сопротивления качения по роликам и в их цапфах, продолжает перемещаться в сторону транспортирования, так как остановы не препятствуют вращению роликов в направлении транспортирования.
Для обратного движения груза исполнительные механизмы 19 через тягу 18 поворачивают рычаги 17 в противоположное направление, в результате чего ролики нолучают возможность свободного вращения
в противоположную сторону. Сила трения груза о ролики меняет свое направление, и груз но аналогично описанной выше схеме начинает двигаться в обратном направлении.
Изменение положения груза на конвейере производится на участках ориентирования и может быть выполнено но двум схемам. Схема 1. Одна половина полуроликов
участка ориентирования заторможена полностью, другая может вращаться только против часовой стрелки. В этом случае при движении в сторону транспортирования затормол :ена и вторая ноловина полуроликов
(см. схему - прямой ход). Силы трения /тр, возникающие между заторможенными нолуроликами и грузом, преодолевая силу инерции РИН, движут груз вперед. При обратном ходе сила инерции РИН стремится
сохранить движение груза в направлении транспортирования, но этому препятствуют сила трения между заторможенной половиной роликов FTP и сила сопротивлеиия качению груза и трение в цапфах незаторможенной половины роликов к. Равнодействующая этих сил W и сила инерции РИН действуют не по одной линии, в результате чего возникает момент М, который и поворачивает груз относительно роликов. В
этом случае груз транспортируется при прямом и разворачивается при обратном ходе рамы с роликами.
Схема 2. Полуролики участка ориентирования имеют свободу вращения в противоположных направлениях. При движении рамы с роликами в сторону транспортирования сила инерции груза стремится вращать полуролики в направлении, противополол ном транспортированию. Одна половина полуроликов может вращаться, а вращению другой препятствуют , остановы. Между заторможенной половиной полуроликов и грузом возникает сила трения FTP а незатормол :енной - сила сопротивления
качению FK, которая значительно меньше
силы трения. Линия действия равнодействующей этих сил W не совпадает с линией действия силы инерции РИН, в результате чего возникает момент М, вращающий груз на роликах.
При обратном ходе рамы с полуроликами сила инерции Р„н меняет направление и стремится вращать полуролики в направлении транспортирования, но этому будут препятствовать остановы уже другой половины полуроликов. В результате равнодействующая сил сопротивления движению груза по роликам W и сила инерции груза Лга будут создавать момент М того же направления, что и при прямом ходе рамы. Груз в этом случае будет разворачиваться на месте.
Конструкция позволяет осуществить двустороннее транспортирование и ориентирование щтучных грузов, которое широко применяется в самых различных технологических процессах, например, в прокатном производстве, в подготовительных цехах по раскройке металла и т. д.
По своей конструкции конвейер прост, легко поддается автоматизации управления и может найти широкое применение как средство межоперационного перемещения изделий при комплексной механизации и автоматизации производства.
Формула изобретения
1. Инерционный конвейер для щтучных грузов, включающий желоб, оснащенный роликоопорами с механизмами свободного хода для обеспечения вращения роликоопор при холостом ходе желоба и стопорения их при рабочем ходе желоба, опорные катки и привод, отличающийся тем, что, с целью расщирения технологических возможностей конвейера, он снабжен основным исполнительным механизмом, а роликоопоры снабжены реверсивными механизмами свободного хода, которые связаны с основным исполнительным механизмом.
2.Конвейер по п. 1, отличающийся тем, что, с целью обеспечения ориентирования груза при транспортировании, он снабжен дополнительным исполнительным
механизмом, а роликоопоры на участке ориентирования выполнены из двух частей, каждая из которых снабжена реверсивным механизмом свободного хода, при этом реверсивные механизмы свободного хода одной части роликоопор связаны с основным исполнительным механизмом, а другой - с дополнительным.
3.Конвейер по п. 1, отличающийся тем, что реверсивный механизм свободного
хода выполнен в виде роликового останова.
4.Конвейер по п. 1, отличающийся тем, что реверсивный механизм свободного хода выполнен в виде фрикционного останова.
Источники информации,
принятые во внимание при экспертизе 1. Спиваковский А. О., Дьячков В. К. Транспортирующие машины, М., «Мащиностроение, 1968, с. 370-373. 2. Авторское свидетельство СССР № 630146, кл. В 65G 25/08, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 2014 |
|
RU2558536C1 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ НА ПОДДОНАХ | 2003 |
|
RU2238900C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 2004 |
|
RU2271326C2 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ИНЕРЦИОННЫМ ПРИВОДОМ | 2009 |
|
RU2410314C2 |
| Склад для хранения штучных грузов | 1980 |
|
SU956365A1 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР | 2009 |
|
RU2406674C1 |
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2234448C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2241651C1 |

5 /т г ;г 1 т V ig /////7///M7////// 2П
OSX fJKf/Mut Q
818988
