Изобретение относится к устройствам для транспортирования и ориентирования штучных грузов и может найти применение в транспортно-технологических системах в различных отраслях промышленности.
Известен инерционный конвейер для штучных грузов, содержащий желоб, оснащенный роликоопорами, выполненными из двух частей, каждая из которых снабжена реверсивным механизмом свободного хода, при этом реверсивные механизмы свободного хода одной части роликоопор связаны с основным исполнительным механизмом, а другой - с дополнительным, катки и привод возвратно-поступательного движения желоба [1].
Наиболее близким по конструкции и достигаемому положительному эффекту является шагающий конвейер, содержащий неподвижную и подвижную рамы, привод подвижной рамы [2, стр.323].
Недостатком известного конвейера является невозможность ориентирования грузов, что сужает его технологические возможности.
Цель изобретения - обеспечение ориентирования штучных грузов.
Указанная цель достигается тем, что подвижная рама выполнена из двух секций, каждая из которых имеет синхронизированные приводные передние и задние кривошипы с закрепленными на них звездочками, при этом на концах приводных передних кривошипов на опорах вращения установлены цилиндрические зубчатые колеса и звездочки, между которыми расположена двухсторонняя кулачковая полумуфта с механизмом управления.
На фиг.1 изображен предлагаемый конвейер, общий вид; на фиг.2 - вид А фиг.1; на фиг.3 - вид Б фиг.2 в положении механизма управления и приводных передних кривошипов при транспортировании груза; на фиг.4 - вид Б фиг.2 в положении механизма управления и приводных передних кривошипов при ориентировании груза; на фиг.5 - разрез В-В фиг.2.
Шагающий конвейер содержит неподвижную раму 1, внутри которой расположены подвижные секции 2 и 3. Каждая секция соединена с приводными передними 4 и 5 и задними 6 и 7 кривошипными валами. Синхронное вращение кривошипов 4 и 5 от привода 8 осуществляется через цилиндрическую зубчатую передачу или цепную передачу. На ступицах шестерни 9 и ведущей звездочки 10 жестко закреплены односторонние кулачковые полумуфты 11. Опоры 12 обеспечивают свободное вращение шестерни 9 и звездочки 10 относительно вала 4. Зубчатое колесо 13 и ведомая звездочка 14 жестко закреплены на кривошипном валу 5. Работа зубчатой или цепной передачи зависит от положения механизма управления, содержащего двухстороннюю кулачковую полумуфту 15, имеющую возможность свободного перемещения в осевом направлении по валу 4, вилку 16 и исполнительный механизм 17. Синхронное вращение задних кривошипов 6 и 7 осуществляется посредством звездочек 18, 19, 20, 21 и бесконечно замкнутых цепей 22 и 23. Кривошипные валы 4, 5, 6 и 7 имеют опоры 24.
Для транспортирования груза включается привод 8, и исполнительный механизм 17 с помощью вилки 16 перемещает в осевом направлении двухстороннюю кулачковую полумуфту 15 к полумуфте 11 ведущей звездочки 10. Таким образом, кривошипный вал 4 через цепную передачу передает вращение валу 5, и секции 2 и 3 совершают синхронные круговые движения в направлении транспортирования груза. При этом взаимодействие зубчатого колеса 13 и шестерни 9 приводит последнюю в свободное вращение относительно вала 4. Параллельное горизонтальное расположение подвижных секций относительно неподвижной рамы осуществляется синхронным вращением задних кривошипных валов 6 и 7, кинематическая связь которых обеспечивается звездочками 18-21 и цепями 22, 23. При движении секций из положения I в положение II по достижении опорной поверхности груза, расположенного на неподвижной раме 1, груз подхватывается и начинает перемещаться в сторону транспортирования. При движении секций из положения II в положение I груз опускается по достижении опорной поверхностью неподвижной рамы, тем самым перемещаясь на один шаг. Далее процесс транспортирования повторяется.
Для ориентирования груза исполнительный механизм 17 с помощью вилки 16 перемещает в осевом направлении двухстороннюю кулачковую полумуфту 15 к полумуфте 11 шестерни 9. Таким образом, кривошипный вал 4 через цилиндрическую зубчатую передачу передает вращение валу 5, и секции 2 и 3 совершают синхронные круговые движения в противоположных направлениях. При этом взаимодействие цепи, ведомой звездочки 14 и ведущей звездочки 10 приводит последнюю в свободное вращение относительно вала 4. Параллельное горизонтальное расположение подвижных секций относительно неподвижной рамы осуществляется вращением задних кривошипных валов 6 и 7, кинематическая связь которых обеспечивается звездочками 18-21 и цепями 22, 23. При движении секций из положения I в положение II по достижении опорной поверхности груза, расположенного на неподвижной раме 1, груз начинает подниматься и одновременно поворачиваться относительно грузонесущих поверхностей секций за счет возникновения сил трения, направленных в противоположные стороны, создавая момент пары сил, который в свою очередь обеспечивает вращательный эффект груза. При движении секций из положения II в положение I груз опускается, продолжая поворачиваться по достижении опорной поверхностью неподвижной рамы. Далее процесс ориентирования повторяется.
По сравнению с прототипом конвейер прост по конструкции, легко поддается автоматизации управления и может найти широкое применение как составная часть транспортирующих и перегрузочных машин при комплексной механизации и автоматизации производства.
Источники информации
1. А.с. СССР 818988, Б.И. № 13, 1981.
2. Спиваковский А.О., Дьячков В.К. Транспортирующие машины: Учеб. пособие для машиностроительных вузов. - 3-е изд., перераб. - М.: Машиностроение, 1983. - 487 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU239852A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| Транспортное средство для перевозки штучных грузов | 1988 |
|
SU1533912A1 |
| ТЕСТОДЕЛИТЕЛЬНАЯ УКЛАДОЧНАЯ МАШИНА | 1997 |
|
RU2127058C1 |
| Автоматизированная линия для изготовления мелкоштучных строительных изделий | 1981 |
|
SU1033338A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ И ТРАНСПОРТИРОВАНИЯ ПРОДОЛГОВАТЫХ ИЗДЕЛИЙ | 1970 |
|
SU283022A1 |
Конвейер содержит неподвижную (1) и подвижную рамы. Подвижная рама выполнена из двух секций (2, 3), каждая из которых имеет синхронизированные приводные передние (4, 5) и задние (6, 7) кривошипы с закрепленными на них звездочками. На концах приводных передних кривошипов на опорах вращения установлены цилиндрические зубчатые колеса и звездочки, между которыми расположена двухсторонняя кулачковая полумуфта с механизмом управления, взаимодействующая с односторонней кулачковой полумуфтой шестерни, передающей вращение с одного переднего кривошипа на другой. Упрощается конструкция конвейера, обеспечивается простота автоматизации управления конвейера. 5 ил.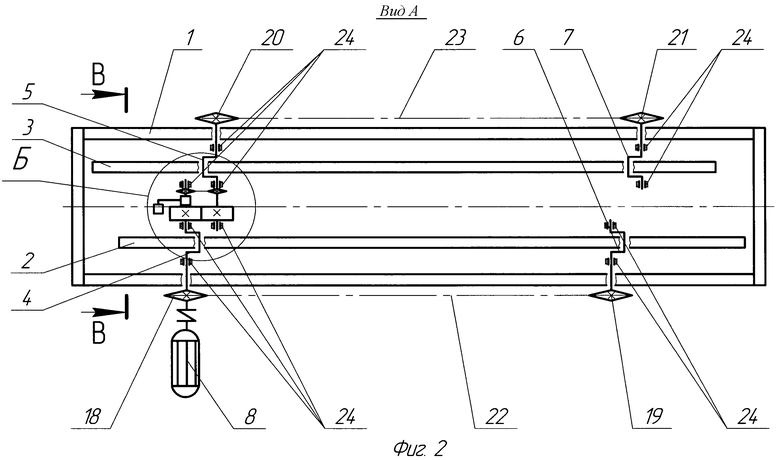
Шагающий конвейер, содержащий неподвижную и подвижную рамы, привод подвижной рамы, отличающийся тем, что подвижная рама выполнена из двух секций, каждая из которых имеет синхронизированные приводные передние и задние кривошипы с закрепленными на них звездочками, при этом на концах приводных передних кривошипов, на опорах вращения установлены цилиндрические зубчатые колеса и звездочки, между которыми расположена двухсторонняя кулачковая полумуфта с механизмом управления, взаимодействующая с односторонней кулачковой полумуфтой шестерни, передающей вращение с одного переднего кривошипа на другой.
| Шаговый конвейер | 1988 |
|
SU1682267A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Шаговый конвейер | 1985 |
|
SU1296493A1 |
| Горизонтально-замкнутый шагающий конвейер автоматической линии | 1985 |
|
SU1283186A1 |
| Устройство для циклического перемещения штучных изделий | 1983 |
|
SU1216091A1 |
| Шаговый конвейер | 1979 |
|
SU796100A1 |
| US 6202830 В1, 20.03.2001. | |||

