Изобретение относится к устройствам, предназначенным для транспортирования штучных грузов, и может найти применение как средство межоперационного перемещения изделий, а также для транспортирования грузов при комплексной механизации погрузочно-разгрузочных транспортных и складских работ.
Известны приводные роликовые конвейеры, в которых ролики приводятся во вращательное движение от привода, а лежащий на них груз перемещается в направлении транспортирования [1, стр.394].
Наиболее близким по конструкции к достигаемому положительному эффекту является инерционный конвейер для штучных грузов, содержащий раму с установленными на ней роликоопорами, оснащенными механизмом свободного хода для обеспечения вращения роликоопор при холостом ходе рамы и стопорении их при рабочем ходе рамы, опорные катки и привод возвратно-поступательного движения рамы [2].
Недостатком известного устройства является увеличение длины конвейера, нерациональное использование производственных площадей, что ведет к увеличению материальных затрат на транспортировку.
Цель изобретения - снижение материальных затрат на транспортирование штучных грузов.
Указанная цель достигается тем, что на неподвижных осях роликоопор жестко закреплена планка, на которой шарнирно, с возможностью поворота установлены упоры.
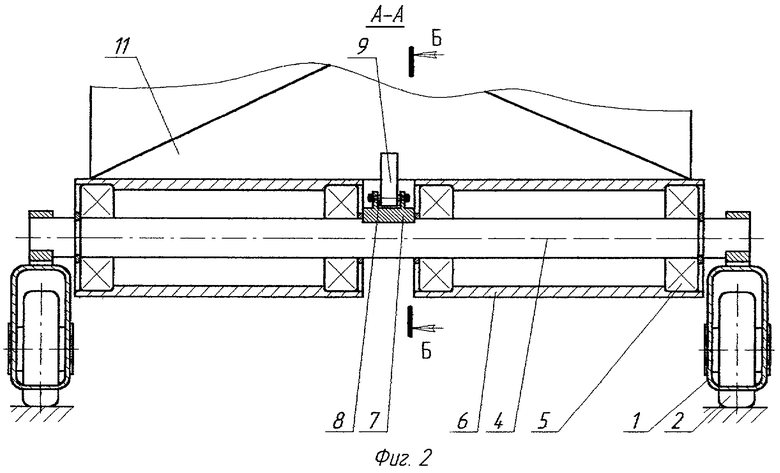
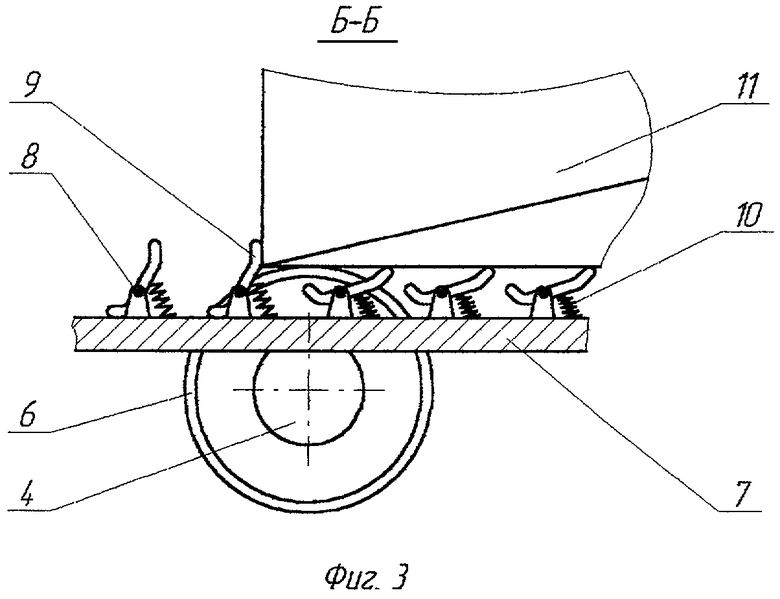
На фиг.1 изображен предлагаемый конвейер, общий вид; на фиг.2 - разрез А-А фиг.1; на фиг.3 - разрез Б-Б фиг.2.
Инерционный роликовый конвейер для перемещения штучных грузов содержит раму 1, установленную на опорных катках 2 и привод 3 в виде кривошипно-шатунного механизма. На раме смонтированы ролики, каждый из которых содержит неподвижно закрепленную на раме 1 ось 4 с установленными на ней на опорах качения 5 двумя полуроликами 6, между которыми на осях 4 жестко закреплена планка 7 с расположенными на ней с возможностью поворота через ось 8 упорами 9 и пружинами 10.
Для осуществления транспортирования включается привод 3, рама 1 вместе с роликами совершает прямолинейное возвратно-поступательное движение в плоскости транспортирования. При прямом ходе, т.е. когда рама с роликами движется в сторону транспортирования, сила инерции и составляющая сила тяжести на наклонном конвейере стремятся переместить груз 11 в противоположном направлении, чему препятствует упор 9, который воздействует на груз, вовлекает его в движение вместе с рамой в направлении транспортирования. При обратном ходе рамы с роликами груз под действием силы инерции, преодолевая сопротивление качения по роликам и в цапфах, продолжает перемещаться в сторону транспортирования, так как упоры 9, сжимая пружины 10, поворачиваясь на оси 8, не препятствуют движению груза в направлении транспортирования. Пружина 10 возвращает упор в исходное положение, предотвращая скатывание груза вниз по конвейеру.
Условием транспортирования груза является то, что сила инерции груза будет больше силы сопротивления от подъема его на высоту и перемещения по роликам:
FИ>W,
или
jmin·m>mg·sinβ+mg·δ·cosβ,
где jmin - минимальное ускорение груза;
m - масса груза;
δ - приведенный коэффициент сопротивления движению груза;
β - угол наклона конвейера.
Применение предлагаемой конструкции позволит по сравнению с прототипом снизить материальные затраты на транспортирование.
Источники информации
1. Спиваковский А.О., Дьячков В.К. Транспортирующие машины: Учеб. пособие для машиностроительных вузов. - 3-е изд., перераб. - M.: Машиностроение, 1983.
2. Авторское свидетельство СССР №630146, 30.10.1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ НА ПОДДОНАХ | 2003 |
|
RU2238900C1 |
| ИНЕРЦИОННЫЙ РОЛИКОВЫЙ КОНВЕЙЕР | 2009 |
|
RU2406674C1 |
| Инерционный конвейер для штучныхгРузОВ | 1979 |
|
SU818988A1 |
| ИНЕРЦИОННЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 2014 |
|
RU2558536C1 |
| Инерционный конвейер | 1987 |
|
SU1452756A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ИНЕРЦИОННЫМ ПРИВОДОМ | 2009 |
|
RU2410314C2 |
| Роликовый конвейер | 1983 |
|
SU1146241A1 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР С ИНЕРЦИОННЫМ ПРИВОДОМ | 2016 |
|
RU2651312C2 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2009 |
|
RU2410315C1 |
Изобретение относится к транспортирующим устройствам, в частности к конвейерам для перемещения грузов. Инерционный роликовый конвейер для перемещения штучных грузов содержит раму с установленными на ней на неподвижных осях роликоопорами, опорные катки и привод возвратно-поступательного движения рамы. На неподвижных осях роликоопор жестко закреплена планка с расположенными на ней шарнирно, с возможностью поворота упорами, входящими в контакт с грузом. Техническим результатом является снижение материальных затрат на транспортирование. 3 ил.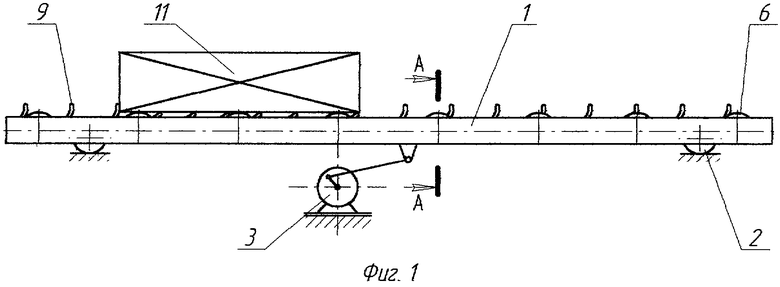
Инерционный роликовый конвейер для перемещения штучных грузов, содержащий раму с установленными на ней на неподвижных осях роликоопорами, опорные катки и привод возвратно-поступательного движения рамы, отличающийся тем, что на неподвижных осях роликоопор жестко закреплена планка с расположенными на ней шарнирно с возможностью поворота упорами, входящими в контакт с грузом.
| Инерционный конвейер для штучных грузов | 1977 |
|
SU630146A1 |
| Инерционный конвейер для штучныхгРузОВ | 1979 |
|
SU818988A1 |
| СТАБИЛИЗАТОР ДАВЛЕНИЯ | 1997 |
|
RU2133905C1 |
| ШТАТИВ КОГАНА И.З. КАПЕЛЬНИЦЫ ДЛЯ ВНУТРИВЕННЫХ ВЛИВАНИЙ | 1993 |
|
RU2074740C1 |
| US 4044876 A, 30.08.1977. | |||

