[01] Область техники
[02] Изобретение относится авиационным тренажерам и может быть использовано для подготовки пилотов вертолетов и самолетов.
[03] Уровень техники
[04] Применяемые в настоящее время тренировочные системы для имитации управления воздушными судами имеют большие размеры, сложную конструкцию и большой расход энергии. Как правило, в них используют мощные гидравлические механизмы для имитации трансформации положения судна, а также множество дисплеев для отображения виртуальных сцен имитации вождения, что требует сложного программного обеспечения.
[05] С целью снижения материальных затрат на подготовку пилотов представляется целесообразным задействовать коммерчески доступные гражданские беспилотные летательные аппараты (БПЛА) вертолетного или самолетного типа, в частности небольшие электрические квадрокоптеры, предназначенные для любительского или профессионального использования (аэросъемка и т.п.). Принцип управления такими БПЛА максимально близок к управлению полноразмерными пилотируемыми воздушными судами, что позволяет будущему пилоту приобрести первичные навыки пилотирования, наблюдая картину реального полета, а не смоделированную с помощью виртуального тренажера сцену. При этом затраты на подготовку пилота с использованием таких БПЛА будут значительно ниже, чем при использовании как реальных пилотируемых судов, так и тренажеров, имитирующих полет с помощью виртуальной реальности.
[06] Наиболее близким аналогом изобретения является вертолетный тренажер на базе БПЛА, раскрытый в заявке Китая CN115457836A, 09.12.2022. Тренажер включает блок пилотирования воздушным судном и БПЛА в виде вертолета. Блок пилотирования содержит установленную на поворотной платформе имитацию кабины, в которой размещены кресла пилотов, консоль с кнопками управления, джойстик, рычаг ножного управления, и дисплей. Кроме того, в блоке управления предусмотрен приемопередатчик, выполненный с возможности подачи управляющих сигналов от органов управления на приемопередатчик БПЛА. При этом сам БПЛА снабжен камерами, передающими изображения на дисплей блока пилотирования. Таким образом, пилот может в реальном времени наблюдать за реальным полетом воздушного судна, отрабатывая навыки пилотирования с помощью механических органов управления.
[07] Главным недостатком указанного аналога является необходимость конструирования всей системы, и в частности, блока управления БПЛА, конкретно под задачи данного тренажера. В данной системе отсутствует возможность использования существующих коммерчески доступных гражданских БПЛА со штатным компактным пультом управления без внесения существенных изменений в конструктив. Это усложняет и удорожает конструкцию тренажера и технологию его производства. Кроме того, наличие механических органов управления, таких как джойстик и ножной рычаг в полной мере не имитирует органы управления пилотируемого воздушного судна, что снижает практическую пользу тренажерной системы.
[08] Таким образом, основной технической проблемой, на решение которой направлено рассматриваемое изобретение, является высокая стоимость тренажеров, обусловленная сложностью производства тренажера, его эксплуатации и обслуживания.
[09] Раскрытие сущности изобретения
[010] Техническим результатом изобретения является возможность построения авиационного тренажера на базе имеющегося БПЛА со штатным пультом управления без внесения изменений в конструкцию БПЛА и пульта. Также технический результат заключается в повышении реалистичности управления за счет применения механических органов управления, соответствующих органам управления пилотируемого воздушного судна.
[011] Указанный технический результат достигается за счет того, что тренажер авиационный включает блок пилотирования, беспилотный летательный аппарат (БПЛА) и устройство дистанционного управления БПЛА. Блок пилотирования содержит кресло пилота и механические органы управления воздушным судном. При этом в отличие от ближайшего аналога, в качестве устройства дистанционного управления использован штатный пульт управления БПЛА, установленный на блоке пилотирования, механические органы управления блока пилотирования включают ручку газа, педали для управления по курсу и штурвал для управления движением по крену и тангажу, причем указанные механические органы управления связаны с соответствующими элементами управления пульта управления БПЛА посредством адаптера.
[012] Указанный технический результат достигается также в частных формах реализации изобретения за счет того, что:
[013] - адаптер выполнен в виде кинематического соединения механических органов управления блока пилотирования и элементов управления пульта управления БПЛА;
[014] - пульт управления БПЛА, в качестве элементов управления содержит первый стик для управления газом и поворотом БПЛА и второй стик для управления направлением БПЛА по крену и тангажу, причем ручка газа и педали соединены с первым стеком, а штурвал - со вторым стиком;
[015] - адаптер содержит первую и вторую штанги, концы которых связаны с первым и вторым стиками посредством магнитных соединений, при этом первая штанга соединена с шарнирной стойкой, которая связана с ручкой газа и педалями посредством тросов, а вторая штанга шарнирно соединена со штурвалом с возможность перемещения по двум осям;
[016] - адаптер выполнен в виде электрического соединения механических органов управления блока пилотирования и элементов управления пульта управления БПЛА;
[017] - адаптер содержит потенциометры, установленные на ручке газа, педалях и штурвале и подключенные через электрический разъем параллельно встроенным потенциометрам пульта управления БПЛА,
[018] - в качестве БПЛА использован электрический квадрокоптер
[019] В отличие от аналогов, в рассматриваемом тренажере применяется штатный пульт управления БПЛА. По термином «штатный пульт управления» подразумевается пульт, входящий в комплект поставки БПЛА и приспособленный для работы с данной моделью БПЛА. При этом для связи органов управления, имитирующих работу пилотируемого воздушного судна, с элементами управления пульта в блоке пилотирования используется адаптер. Это позволяет значительно упросить конструкцию, процесс производства и обслуживания тренажера, поскольку отпадает необходимость конструировать специальное БПЛА и систему его управления или же вносить в комплект существующего БПЛА существенные конструктивные изменения. Вместо этого в составе тренажера могут применяться комплекты гражданских БПЛА, находящиеся в свободной продаже. В таком варианте тренажер можно будет легко собирать, транспортировать и обслуживать.
[020] Кроме того, органы управления используемые в блоке пилотирования заявленного тренажера, соответствуют органам пилотируемого воздушного судна (как вертолета, так и самолета) и соединены с аналогичными элементами управления БПЛА, что позволяет БПЛА реагировать на управляющие команды так же, как это происходит в пилотируемом воздушном судне. Это повышает реалистичность управления воздушным судном в тренажере.
[021] Краткое описание чертежей
[022] Изобретение поясняется фигурами, где:
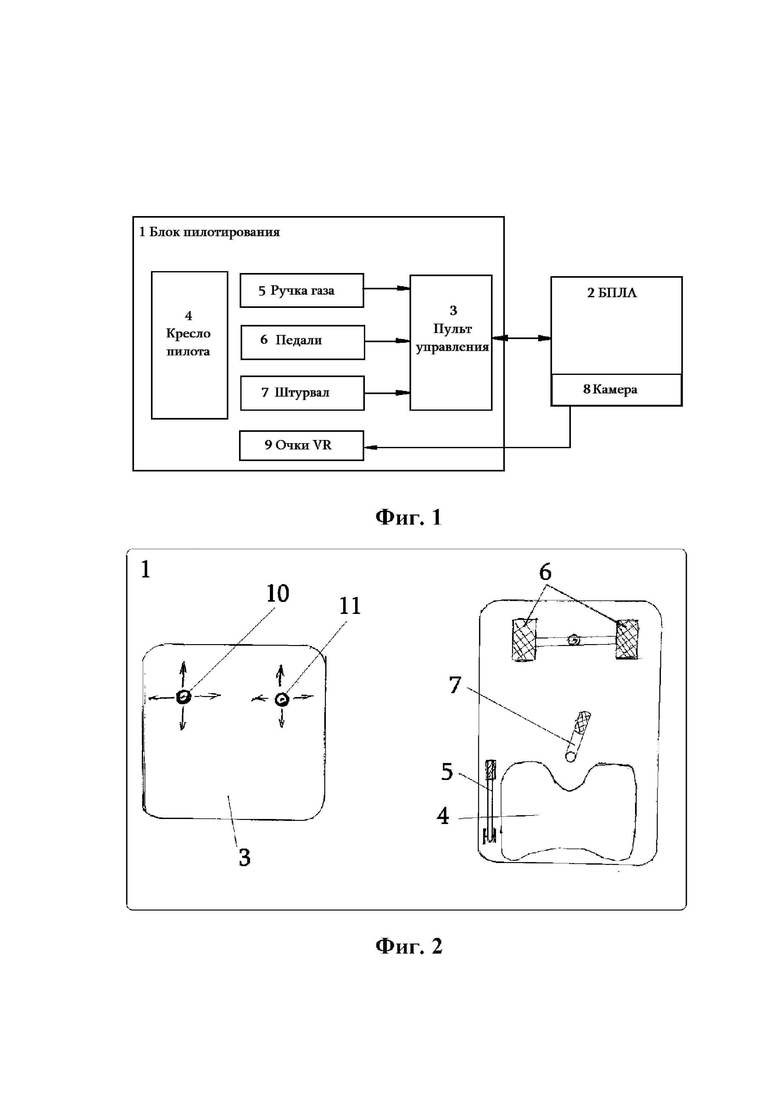
на фигуре 1 показа блок-схема заявленного тренажера,
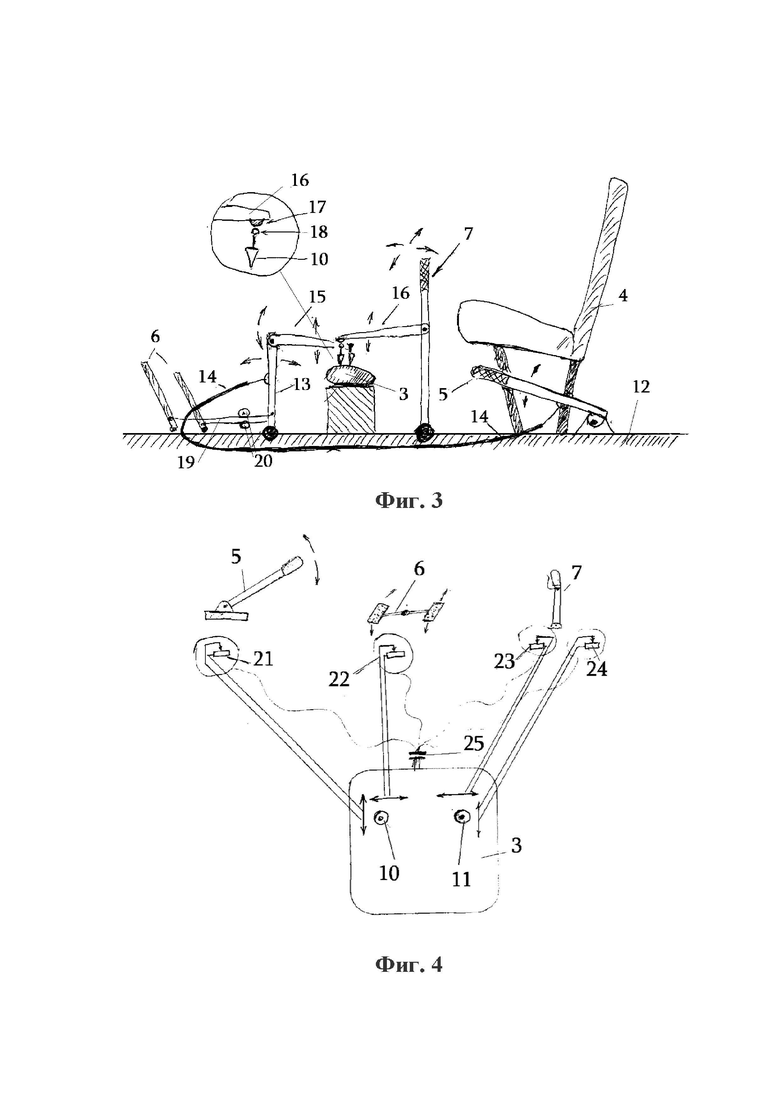
на фигуре 2 показана схема блока пилотирования тренажера,
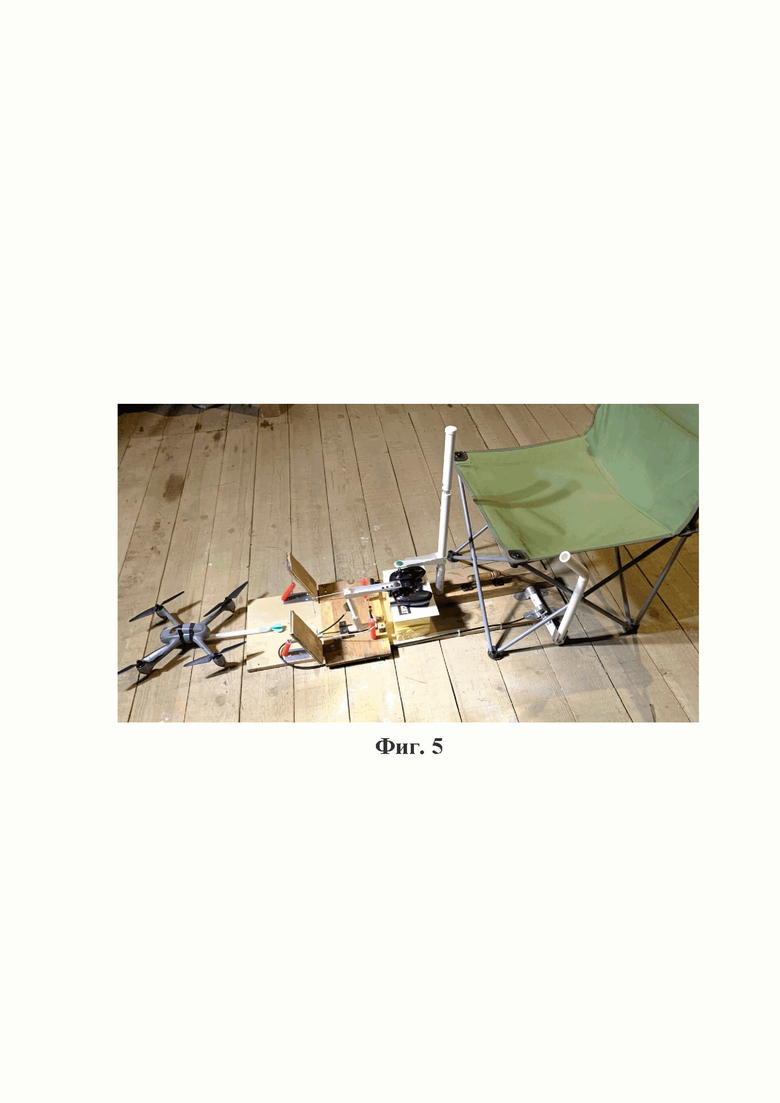
на фигуре 3 показан вариант выполнения блока пилотирования с механической связью органов управления с пультом БПЛА,
на фигуре 4 показан вариант выполнения блока пилотирования с электрической связью органов управления с пультом БПЛА,
на фигуре 5 показана фотография опытного образца заявленного тренажера
[023] Элементы конструкции обозначены на фигурах следующими позициями:
1 - блок пилотирования,
2 - БПЛА,
3 - пульт управления БПЛА,
4 - кресло пилота
5 - ручка газа (рукоятка шаг-газ),
6 - педали для управления по курсу
7 - штурвал (джойстик) для управления по крену и тангажу,
8 - видеокамера БПЛА,
9 - очки виртуальной реальности для пилота,
10 - первый стик для управления оборотами винтов и поворотом БПЛА,
11 - второй стик для управления направлением полета БПЛА,
12 - платформа блока,
13 - шарнирная стойка,
14 - жесткий трос,
15 - первая штанга.
16 - вторая штанга,
17 - магнит,
18 - металлический стержень
19 - эластичный трос
20 - ролик,
21 - первый потенциометр,
22 - второй потенциометр,
23 - третий потенциометр,
24 - четвертый потенциометр,
25 - разъем пульта,
[024] Осуществление изобретения
[025] Заявленный тренажер (см. фиг.1) включает блок пилотирования (1) и БПЛА (2) со штатным пультом управления (3). БПЛА (2) представляет собой коммерчески доступный гражданский БПЛА вертолетного или самолетного типа. В частности, может применяться электрический квадрокоптер, например, таких производителей как DR, Autel, Fimi, Syma и др. В предпочтительном варианте реализации изобретения БПЛА (2) оснащен по меньшей мере одной видеокамерой (8)
[026] Основными элементами управления штатного пульта (3) БПЛА (см. фиг.2) являются два стика (двухкоординатных джойстика). Первый (левый) стик (10) отвечает за управление оборотами винтов/газом (движение стика вперед-назад) и поворотом БПЛА (движение стика влево-вправо). Второй (правый) стик (11) отвечает за направление полета БПЛА, т.е. управление креном и тангажом (движение стика вперед, назад, влево и вправо). Пульт управления (3) связан с БПЛА (2) с помощью приемопередающих устройств и антенн.
[027] Блок пилотирования (1) (см. фиг.2 и 3), предпочтительно, представляет собой единое устройство, включающее основание (платформу) (12), на которой смонтированы элементы, имитирующие кабину пилота, а также закреплен штатный пульт управления (3). В качестве элементов для имитации кабины пилота блок пилотирования (1) содержит по меньшей мере одно кресло пилота (4), а также механические органы управления воздушного судна в виде ручки газа (5) («сектор газа», рукоятка «шаг-газ»), педалей (6) для управления по курсу, и штурвала (7) (джойстика и т.п.) для управления по направлению креном и тангажом. Расположение механических органов управления (5, 6, 7), предпочтительно, должно соответствовать компоновке реального пилотируемого судна.
[028] Указанные механические органы управления (5, 6, 7) блока пилотирования (1) соответствуют элементам управления штатного пульта (3) и связаны с ними с помощью адаптера. В частных случаях реализации изобретения адаптер может быть выполнен в виде кинематического или электрического соединения.
[029] Кинематическое соединение (см. фиг.3) образовано связью ручки газа (5) и педалей (6) с первым стиком (10), а также штурвала (7) со вторым стиком (11), там образом, что ручка газа (5) перемещает первый стик (10) вперед-назад, педали (6) перемещают первый стик (10) влево-вправо, а штурвал (7) (джойстик), закрепленный шарнирно, перемещает второй стик (11) по двум осям (вперед, назад, влево, вправо). Для этого адаптер может содержать две подвижные штанги (15,16), первая (15) из которых взаимодействие с первым стиком (10) пульта, а вторая (16) - со вторым стиком (11). Для перемещения указанных стиков (10,11) на концах штанг (15,16) установлены магниты (17), взаимодействующие с металлическими элементами (18) (из магнитного материала), закрепленными на стике. В качестве металлического элемента (18) может использоваться стальной шуруп, вкрученный внутрь стика, что обеспечивает удлинение стиков для более точного и чувствительного управления. Другой конец первой штанги (15) поворотно закреплен на стойке (13), прикрепленной к основанию (12) двухосевым шарниром, указанная стойка связана с ручкой газа (15) с помощью жесткого троса (14), и с педалями (6) посредством эластичного троса (19), взаимодействующего с роликами (20). Второй конец второй штанги (16) поворотно закреплен на штурвале (7) с возможностью передачи движения на стик (11) по двум осям.
[030] Возможны и иные варианты реализации кинематической связи органов управления со элементами управления пульта. Например, может применяться механическая система рычагов, тросов, ремней, электромеханические системы, гидравлические системы, пневматические системы, и их комбинации. Для удобства кинематического соединения пульт управления (3) может закрепляться на отдельном постаменте, прикрепленном к основанию (12) блока пилотирования (1).
[031] Электрическое соединение (см. фиг.4) с помощью адаптера может быть реализовано с помощью четырех потенциометров, первый (21) из которых смонтирован на ручке газа (5), второй (22) - на педалях (6), а третий (23) и четвертый (24) - на штурвале (7). Потенциометры (21, 22, 23, 24) подключаются параллельно встроенным потенциометрам пульта (3) управления через электрический разъем (25)
[032] Блок пилотирования может быть реализован, например, на базе списанного воздушного судна или полноразмерного макета судна, изготовленного из недорогих материалов.
[033] Дополнительно в блоке пилотирования (1) могут использоваться очки виртуальной реальности (VR) (9), которые связаны с видеокамерой (8) БПЛА с возможностью беспроводной передачи видеоизображения пилоту в реальном времени.
[034] Тренажер функционирует следующим образом.
[035] Тренируемый пилот с помощью механических органов управления (5, 6, 7) поднимает БПЛА (квадрокоптер) в воздух и осуществляет отработку стандартных упражнений, которые используются при обучении управлением пилотируемых воздушных судов. При движении ручкой газа (5) вперед-назад, а также нажатии правой и левой педалей (6) происходит соответствующее перемещение первого стика (10) (для электрического соединения подаются соответствующие сигналы на потенциометры) и БПЛА корректируется по скорости и курсу. При совершении движения штурвалом (7) (джойстиком) происходит перемещение второго стика (11) (или подача электрических сигналов на потенциометры) и БПЛА вращается вокруг продольной оси (крен) и поперечной оси (тангаж).
[036] Пилот может наблюдать со стороны как реагирует воздушное судно в реальном полете на то или иное управляющее воздействие, что полностью соответствует работе полноразмерного пилотируемого аппарата. При использовании очков (9) пилот может увидеть картину полета от первого лица, что может повысить реалистичность управления.
[037] Автором изобретения, имеющим практический опыт в управлении пилотируемых воздушных судов, был изготовлен опытный образец заявленного тренажера на базе электрического квадрокоптера (см. фигуру 5). Полетные испытания показали, что квадрокоптер реагирует на команды от органов управления также как и полноразмерное пилотируемое воздушное судно (вертолет). Например, с помощью такого тренажера эффективно отрабатывается упражнение «зависание в воздухе», которое является базовым для пилотов вертолета и на освоение которого уходит достаточно длительное время.
[038] Несмотря на то, что изобретение проиллюстрировано на примере электрического квадрокоптера, тренажер также может быть реализован и на базе других БПЛА. Описанные в заявке механические органы управления также используются и в пилотируемом самолете, поэтому тренажер может функционировать и в комплекте с БПЛА самолетного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| ВИРТУАЛЬНЫЙ ТРЕНАЖЕР ОПЕРАТОРА ДИСТАНЦИОННОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2327225C1 |
| Система для балансирного управления летательным аппаратом | 2019 |
|
RU2728219C1 |
| Способ интуитивного управления летательным аппаратом | 2018 |
|
RU2711770C1 |
| Авиационный симулятор (авиасимулятор) самолета Boeing 737 | 2018 |
|
RU2688500C1 |
| Устройство для управления пилотируемым летательным аппаратом вертикального взлета и посадки | 2019 |
|
RU2722651C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| Способ формирования у пилота достоверного образа полета при пилотировании по приборам | 2018 |
|
RU2689086C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СКОЛЬЖЕНИЯ | 2020 |
|
RU2759370C1 |
Тренажер авиационный содержит блок пилотирования (1), беспилотный летательный аппарат (БПЛА) (2) и устройство дистанционного управления БПЛА. Блок пилотирования (1) содержит кресло пилота (4) и механические органы управления (5, 6, 7) воздушным судном. Устройство дистанционного управления реализовано в виде штатного пульта управления (3) БПЛА, установленного на блоке пилотирования (1). Механические органы управления блока пилотирования включают ручку газа (5), педали (6) для управления по курсу и штурвал (7) для управления движением по крену и тангажу, причем указанные механические органы управления (5, 6, 7) связаны с соответствующими элементами управления пульта управления (3) БПЛА посредством адаптера. Обеспечивается возможность построения авиационного тренажера на базе имеющегося БПЛА со штатным пультом управления без внесения изменений в конструкцию БПЛА и пульта управления, а также повышение реалистичности управления за счет применения механических органов управления, соответствующих органам управления пилотируемого воздушного судна. 7 з.п. ф-лы, 5 ил.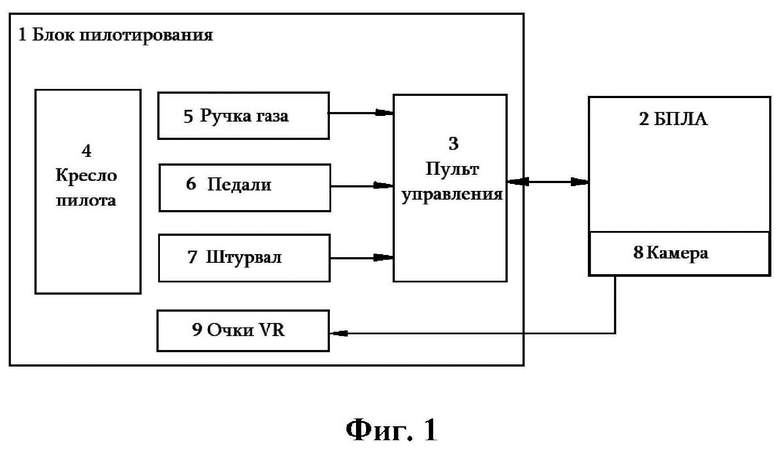
1. Тренажер авиационный, включающий блок пилотирования (1), беспилотный летательный аппарат (БПЛА) (2) и устройство дистанционного управления БПЛА, причем блок пилотирования (1) содержит кресло пилота (4) и механические органы управления (5, 6, 7) воздушным судном, отличающийся тем, что в качестве устройства дистанционного управления использован штатный пульт управления (3) БПЛА, установленный на блоке пилотирования (1), механические органы управления блока пилотирования включают ручку газа (5), педали (6) для управления по курсу и штурвал (7) для управления движением по крену и тангажу, причем указанные механические органы управления (5, 6, 7) связаны с соответствующими элементами управления пульта управления (3) БПЛА посредством адаптера.
2. Тренажер по п.1, отличающийся тем, что адаптер выполнен в виде кинематического соединения механических органов управления (5, 6, 7) блока пилотирования и элементов управления пульта управления (3) БПЛА.
3. Тренажер по п.2, отличающийся тем, что пульт управления (3) БПЛА в качестве элементов управления содержит первый стик (10) для управления газом и поворотом БПЛА и второй стик (11) для управления направлением БПЛА по крену и тангажу, причем ручка газа (5) и педали (6) соединены с первым стиком (10), а штурвал (7) - со вторым стиком (11).
4. Тренажер по п.3, отличающийся тем, что адаптер содержит первую (15) и вторую (16) штанги, концы которых связаны с первым (10) и вторым (11) стиками посредством магнитных соединений, при этом первая штанга (15) соединена с шарнирной стойкой (13), которая связана с ручкой газа (5) и педалями (6) посредством тросов (14, 19), а вторая штанга (16) шарнирно соединена со штурвалом (7) с возможность перемещения по двум осям.
5. Тренажер по п.1, отличающийся тем, что адаптер выполнен в виде электрического соединения механических органов управления (5, 6, 7) блока пилотирования и элементов управления пульта управления БПЛА.
6. Тренажер по п.5, отличающийся тем, что адаптер содержит потенциометры (21, 22, 23, 24), установленные на ручке газа (5), педалях (6) и штурвале (7) и подключенные через электрический разъем (25) параллельно встроенным потенциометрам пульта управления (3) БПЛА.
7. Тренажер по п.1, отличающийся тем, что БПЛА снабжен видеокамерой (8), а блок пилотирования (1) дополнительно содержит очки виртуальной реальности, связанные с видеокамерой (8) с возможностью получения изображений в реальном времени.
8. Тренажер по п.1, отличающийся тем, что в качестве БПЛА использован электрический квадрокоптер.
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ УРОВНЯ жидкостив | 0 |
|
SU173153A1 |
| Тестомесильная машина непрерывного действия | 1947 |
|
SU70396A1 |
| KR 101764850 B1, 07.08.2017 | |||
| KR 1020160043705 A, 22.04.2016 | |||
| CA 2891377 A1, 03.07.2014. | |||

