Изобретение относится к области авиакосмической промышленности и может быть использовано для непрерывного неразрушающего контроля и диагностирования технического состояния служебных систем летательного аппарата (ЛА) в течение всего периода его эксплуатации.
Известен ряд способов контроля и диагностирования технического состояния служебных систем («Способ контроля и оценки технического состояния многопараметрического объекта диагностики по данным измерительной информации» / RU 2145735, опубликовано 20.02.2000, - [Д1]; «Способ динамического контроля тупиковых ситуаций инфокоммуникационных систем и устройство для его осуществления» / Патент №2502123 от 20.12.2013 г. - [Д2]).
В качестве аналога изобретения выбрано техническое решение, описанное в Д1. Недостатком аналога следует отметить отсутствие какой-либо эталонной модели многопараметрического объекта (служебной системы). Диагностирование технического состояния происходит путем сравнения текущего состояния многопараметрического объекта диагностики и априорно составленной структурно-функциональной схемы состояний структурных элементов, построенной из базовых структурных описаний. Такой способ не учитывает динамики меняющихся состояний как внешних возмущающих факторов, так и служебных систем ЛА.
Наиболее близким к заявляемому изобретению по сути технического решения является «Способ динамического контроля тупиковых ситуаций инфокоммуникационных систем и устройство для его осуществления» [Д2]. Указанное техническое решение имеет аналогичное назначение, что и заявленное, и поэтому выбрано прототипом.
В прототипе технический результат достигается тем, что проводится динамический контроль инфокоммуникационной системы, при этом определяют значения: 




где:

i=1, 2, 3, … - текущий индекс критического технического ресурса riт;
tвнп - временной интервал планируемого выполнения процессов;

j=1, 2, 3, … - текущий индекс критического программного ресурса rjп;
k - порядок аппроксимирующего распределения Эрланга с параметром @э - интенсивности пуассоновского потока в узел для целого значения размера q зоны буферной памяти узла системы;
n=1, 2, 3, … - текущий индекс зоны буферной памяти в системе;
N - общее количество зон буферной памяти в системе,
сравнивают определенный в динамике функционирования системы коэффициент готовности - Кгтр с пороговым уровнем Кгтр (0) и при выполнении условия:
Кгтр<Кгтр (0)
делают вывод о наличии тупиковых ситуаций в служебной системе.
Недостатком прототипа является отсутствие полноты диагностирования. Однако использование прототипа и реализация на его основе определенного алгоритма и необходимых функций процесса диагностирования с использованием предложенных формул и формул из ГОСТ позволяют получить заявленный в изобретении технический результат.
Основой любого метода диагностирования является диагностическая модель контролируемого объекта, т.е. формальное описание работоспособного состояния ЛА, позволяющее по известным значениям входных параметров моделировать и вычислять с заданной точностью значения его выходных параметров (ГОСТ 20911-89 «Техническая диагностика. Термины и определения» - [Д3]).
Для решения подобных задач широко применяются так называемые регрессионные модели. Такая модель представляет собой функциональную зависимость (уравнение регрессии), описывающую изменение выходных параметров объекта, когда известны изменения его входных параметров.
Схема процесса диагностирования технического состояния служебных систем ЛА, построенного с помощью регрессионной и нейросетевой аналитико-имитационной моделей, представлена на чертеже. В технической литературе приведены описания моделей и применяемые методологические подходы при реализации процедур диагностирования (Методические указания / «Техническая диагностика. Определение параметров технического состояния объектов диагностирования по косвенным параметрам на основе регрессионных моделей.» / РД 50-491-84 / Утверждены Постановлением Госстандарта от 24 июля 1984 г. №2578 - [Д4]; Иванов А.И. / «Подсознание искусственного интеллекта: программирование автоматов нейросетевой биометрии языком их обучения» /Россия, Пенза - 2012, Электронная книга, издательства ОАО «ПНИЭИ» - 125 с. - [Д5]).
При выборе математического аппарата диагностических моделей для решения практических задач контроля технического состояния ЛА необходимо учитывать не только точность моделирования, но и удобство его реализации в пользовательских приложениях. Одновременно должны обеспечиваться: возможность дообучения по мере накопления экспериментальных данных, инвариантность по отношению к особенностям функционирования объекта диагностирования, к количеству его входных параметров и др.
В связи с этим интерес для оперативного контроля и диагностирования технического состояния служебных систем ЛА представляет аппарат искусственных нейронных сетей (ИНС или просто нейросетей), позволяющий решить большинство поставленных задач, и построенная по этим принципам нейросетевая аналитико-имитационная модель служебных систем ЛА для осуществления способа диагностирования, предложенного в данном изобретении.
Нейросеть представляет собой совокупность искусственных нейронов, определенным образом соединенных друг с другом и с внешней средой с помощью связей, определяемых весовыми коэффициентами. Свойства и возможности нейросети зависят от ее структуры и видов функций, реализуемых нелинейным преобразователем. Большинство задач технической диагностики успешно решаются с помощью многослойных нейросетей прямого распространения, в которых искусственные нейроны располагаются слоями (Амосов О.С. «Интеллектуальные информационные системы. Нейронные сети и нечеткие системы»: Учеб. Пособие / О.С. Амосов. - Комсомольск-на-Амуре: ГОУВПО «КнАГТУ», 2004. - 104 с. - [Д6]).
Для того чтобы работа нейросети (т.е. реакция ее выходов на изменение входов) точно соответствовала работе реальной служебной системы ЛА, ее обучают, т.е. подбирают значения весов таким образом, чтобы разница между значениями выходов сети и соответствующих выходов реальной служебной системы ЛА была минимальной. Для обучения используются значения входных и выходных параметров реального ЛА, измеренные в процессе его эксплуатации (так называемая обучающая выборка). Обучение сети выполняется в автоматическом режиме с использованием специальных обучающих алгоритмов (В.А. Шустов / «Ускорение обучения нейронной сети с отбором обучающих примеров» / Самарский государственный аэрокосмический университет, Институт систем обработки изображений РАН, Международный центр научной и технической информации, Компьютерная оптика, выпуск 24 - 2002 - [Д7]).
Аппарат искусственных нейронных сетей позволяет решать задачу оценки работоспособности служебных систем ЛА как отдельных функционально обособленных систем (блоков), при этом ЛА рассматривается как система взаимосвязанных служебных систем, работа каждой из которых моделируется отдельной нейросетью.
То есть диагностическая модель ЛА в данном изобретении представляет собой нейросетевой диагностический комплекс, связи между нейросетями которого соответствуют связям между служебными системами реального ЛА. (Журнал «Локомотив», №07-2012/ А.В. Грищенко, «Аппарат искусственных нейронных сетей для диагностики современного локомотива» - [Д8]). В случае ухода выходных параметров за допустимые пределы или отказа объекта результатом работы комплекса будет не просто заключение о его неработоспособном состоянии, но и определение места и причины нештатной ситуации или отказа элемента, или блока.
В соответствии с ГОСТ 27002-89 и ГОСТ Р 53111-2008 функционирование любой служебной системы ЛА оценивают через показатели ее устойчивости (Козлов В.Г. и др. «Об устойчивости функционирования инфокоммуникационных систем», // журнал Фундаментальные исследования. - 2009 - №5, стр.54-55 - [Д9]). Уточним следующие определения для однозначного их толкования.
Определение 1. Под устойчивостью функционирования служебной системы ЛА понимается ее способность выполнять возложенные функции с заданными показателями качества в условиях воздействия дестабилизирующих факторов и характеризуется величинами частных и общего коэффициентов устойчивости.
Определение 2. Служебная система ЛА считается устойчивой к воздействию ряда дестабилизирующих факторов, если общий показатель устойчивости ее функционирования находится в заданных пределах.
Определение 3. Общий показатель устойчивости функционирования служебной системы ЛА есть произведение частных показателей устойчивости, при условии, что причины и механизмы возникновения дестабилизирующих факторов независимы друг от друга, а деградация любого модуля любой служебной системы ЛА происходит независимо друг от друга.
Определение 4. Под частным показателем устойчивости функционирования служебной системы ЛА понимается коэффициент устойчивости Кучk, определяемый из выражения:
где:
Yтрk - требуемое значение показателя качества функционирования служебной системы КА;
Yk - значение показателя качества функционирования служебной системы ЛА в условиях воздействия дестабилизирующего фактора.
Технической задачей изобретения является полное диагностирование технического состояния М служебных систем летательного аппарата, где М=1, 2, 3 ….
Технический результат изобретения достигается осуществлением полноты процесса диагностирования на основе применения процедур контроля с использованием введенных контроллеров и приведенных в описании изобретения новых математических моделей, обеспечивающих вычисления значений коэффициентов устойчивости при диагностировании технического состояния служебных систем ЛА, а также с использованием приведенных в ГОСТ 27002-89 и ГОСТ Р 53111-2008 формул для вычислений значений параметров рекомендуемых показателей надежности, безотказности, долговечности.
Сущность изобретения заключается в том, что, в отличие от известного технического решения, формируют для каждой из М, где М=1, 2, 3 …, служебных систем летательного аппарата необходимый набор диагностических компонентов из нейросетевой аналитико-имитационной модели служебной системы летательного аппарата, контроллера отклонений параметров сигналов служебной системы летательного аппарата, контроллера анализа технического состояния служебной системы летательного аппарата и контроллера формирования массива диагностических признаков служебной системы летательного аппарата, причем совокупность реальных входных сигналов Xk, где k=1, 2, 3, …, подают одновременно как на входы служебной системы летательного аппарата, так и на входы нейросетевой аналитико-имитационной модели служебной системы летательного аппарата, с выходов которых сигналы Yk, где k=1, 2, 3, …, служебной системы летательного аппарата и эталонные сигналы YТРk, где k=1, 2, 3, …, нейросетевой аналитико-имитационной модели служебной системы летательного аппарата подают на входы контроллера отклонений параметров сигналов служебной системы летательного аппарата, где по формуле 
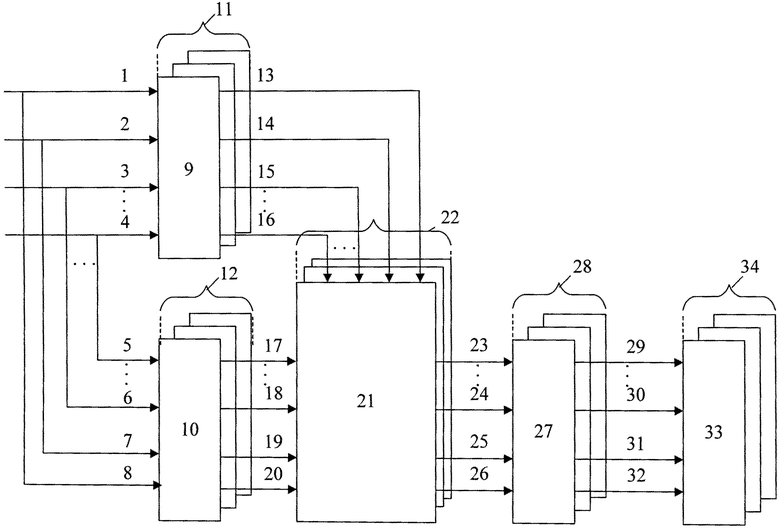
Заявленный способ диагностирования технического состояния служебных систем летательного аппарата поясняется чертежом, на котором приняты следующие обозначения:
1 - Х1, первый входной сигнал, поступающий на первый вход служебной системы летательного аппарата;
2 - Х2, второй входной сигнал, поступающий на второй вход служебной системы летательного аппарата;
3 - Х3, третий входной сигнал, поступающий на третий вход служебной системы летательного аппарата;
4 - Xk, k-й входной сигнал, поступающий на k-й вход служебной системы летательного аппарата;
5 - Xk, k-й входной сигнал, поступающий на k-й вход нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
6 - Х3, третий входной сигнал, поступающий на третий вход нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
7 - Х2, второй входной сигнал, поступающий на второй вход нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
8 - X1, первый входной сигнал, поступающий на первый вход нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
9 - служебная система летательного аппарата;
10 - нейросетевая аналитико-имитационная модель служебной системы летательного аппарата;
11 - М, количество служебных систем летательного аппарата;
12 - М, количество нейросетевых аналитико-имитационных моделей служебных систем летательного аппарата;
13 - Y1, первый выходной сигнал с первого выхода служебной системы летательного аппарата;
14 - Y2, второй выходной сигнал со второго выхода служебной системы летательного аппарата;
15 - Y3, третий выходной сигнал с третьего выхода служебной системы летательного аппарата;
16 - Yk, k-й выходной сигнал с k-го выхода служебной системы летательного аппарата;
17 - YTPk, k-й выходной эталонный сигнал с k-го выхода нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
18 - YTP3, третий выходной эталонный сигнал с третьего выхода нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
19 - YTP2, второй выходной эталонный сигнал со второго выхода нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
20 - YTP1, первый выходной эталонный сигнал с первого выхода нейросетевой аналитико-имитационной модели служебной системы летательного аппарата;
21 - контроллер отклонений параметров сигналов служебной системы летательного аппарата;
22 - М, количество контроллеров отклонений параметров сигналов служебной системы летательного аппарата;
23 - 
24 - 
служебной системы летательного аппарата от третьего выходного эталонного сигнала;
25 - 
служебной системы летательного аппарата от второго выходного эталонного сигнала;
26 - 
служебной системы летательного аппарата от первого выходного эталонного сигнала;
27 - контроллер анализа технического состояния служебной системы летательного аппарата;
28 - М, количество контроллеров анализа технического состояния служебной системы летательного аппарата;
29 - Кучk, k-й частный коэффициент устойчивости по k-му сигналу;
30 - Куч3, третий частный коэффициент устойчивости по третьему сигналу;
31 - Куч2, второй частный коэффициент устойчивости по второму сигналу;
32 - Куч1, первый частный коэффициент устойчивости по первому сигналу;
33 - контроллер формирования массива диагностических признаков служебной системы летательного аппарата;
34 - М, количество контроллеров формирования массива диагностических признаков служебной системы летательного аппарата.
Сведения, подтверждающие возможность осуществления изобретения, приведены в источниках Д3-Д9, а также в статье «О диагностике служебных систем космического аппарата», Д10, материалы источника Д10 помещены в Приложении к материалам заявки.
Примечание
Заявитель поместил в Приложении к материалам заявки дополнительные сведения, подтверждающие возможность осуществления изобретения, чтобы излишне не перегружать описание изобретения. Однако, если экспертиза сочтет целесообразным, заявитель не будет возражать на включение Приложения в состав описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ИНФОРМАЦИОННО-ПРЕОБРАЗУЮЩИХ ЭЛЕМЕНТОВ БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНОГО СУДНА НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2802976C1 |
| СПОСОБ ДИНАМИЧЕСКОГО КОНТРОЛЯ ТУПИКОВЫХ СИТУАЦИЙ ИНФОКОММУНИКАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502123C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ БЕЗ УЧИТЕЛЯ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ОБУЧЕНИЯ МОДЕЛЕЙ | 2023 |
|
RU2818858C1 |
| СПОСОБ КОНТРОЛЯ ТУПИКОВЫХ СИТУАЦИЙ ИНФОКОММУНИКАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2509346C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ, ДИАГНОСТИКИ ТЕХНИЧЕСКОГО И ФИЗИЧЕСКОГО СОСТОЯНИЯ КОМПЛЕКСА "ЧЕЛОВЕК - МАШИНА" | 2014 |
|
RU2602350C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ СО ВСТРОЕННОЙ НЕЙРОСЕТЬЮ | 2024 |
|
RU2828993C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
Изобретение относится к средствам управления и наблюдения за состоянием изделий, в т.ч. служебных систем (СС) летательного аппарата (ЛА). Способ включает сравнение коэффициента готовности (Кгтр) с его пороговым уровнем. Для каждой из СС ЛА формируют необходимый набор диагностических компонентов из нейросетевой аналитико-имитационной модели (НСМ) СС, контроллера отклонений параметров (КОП) сигналов СС, контроллера анализа технического состояния (КАТС) СС и контроллера формирования массива диагностических признаков (КФДП) СС. Входные сигналы подают одновременно на входы СС и НСМ. Выходные сигналы этих систем подают на входы КОП СС, где вычисляют разности сигналов. Последние передают на входы КАТС, где вычисляют частные коэффициенты устойчивости (Кучk). Значения Кучk передают на входы КФДП, где вычисляют значения Кгтр и др. показателей надежности, безотказности, долговечности и т.д. (пользуясь рекомендациями и формулами ГОСТ 27002-89 и ГОСТ Р 53111-2008). Формируют из вычисленных значений массив диагностических признаков, который записывают в буферную память КФДП. Техническим результатом изобретения является обеспечение наиболее полного диагностирования всех служебных систем ЛА. 1 ил.
Способ диагностирования технического состояния служебных систем летательного аппарата, заключающийся в вычислении коэффициента готовности (Кгтр) по формуле:

где:

i=1, 2, 3, … - текущий индекс критического технического ресурса riт;
tвнп - временной интервал планируемого выполнения процессов;

j=1, 2, 3, … - текущий индекс критического программного ресурса rjп;
k - порядок аппроксимирующего распределения Эрланга с параметром @э - интенсивности пуассоновского потока в узел для целого значения размера q зоны буферной памяти узла системы;
n=1, 2, 3, … - текущий индекс зоны буферной памяти в системе;
N - общее количество зон буферной памяти в системе,
сравнении вычисленного коэффициента готовности Кгтр с пороговым уровнем Кгтр (0), отличающийся тем, что для каждой из М, где М=1, 2, 3 …, служебных систем летательного аппарата формируют необходимый набор диагностических компонентов из нейросетевой аналитико-имитационной модели служебной системы летательного аппарата, контроллера отклонений параметров сигналов служебной системы летательного аппарата, контроллера анализа технического состояния служебной системы летательного аппарата и контроллера формирования массива диагностических признаков служебной системы летательного аппарата, причем совокупность реальных входных сигналов Xk, где k=1, 2, 3, …, подают одновременно как на входы служебной системы летательного аппарата, так и на входы нейросетевой аналитико-имитационной модели служебной системы летательного аппарата, с выходов которых сигналы Yk, где k=1, 2, 3, …, служебной системы летательного аппарата и эталонные сигналы YTPk, где k=1, 2, 3, …, нейросетевой аналитико-имитационной модели служебной системы летательного аппарата подают на входы контроллера отклонений параметров сигналов служебной системы летательного аппарата, где по формуле 
| СПОСОБ ДИНАМИЧЕСКОГО КОНТРОЛЯ ТУПИКОВЫХ СИТУАЦИЙ ИНФОКОММУНИКАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502123C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| СПОСОБ КОНТРОЛЯ ПРОЧНОСТИ И ВИБРАЦИИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363935C1 |
| Ручной станок для опиливания деревянных свай под водой | 1952 |
|
SU112405A1 |
| US 7089592 B2, 08.08.2006; | |||
| US 20020117579 A1, 29.08.2002; | |||
| WO 1995011488 A1, 27.04.1995; | |||
| US 6114976 A1, 05.09.2000 | |||

