Изобретение относится к стационарным приводам поточно-контейнерных систем транспорта грузов.
Известен привод, содержащий двигатель, размещенные в корпусе цепные передачи, соединенные между собой траверсами с жестко закрепленными на них магнитами, взаимодействующими с ферромагнитными частями перемещаемого груза, например лентой конвейера. Для отрыва магнитов от ленты на концевых участках привода установлены клиновые упоры [Л1].
Недостатком этого устройства является то, что механический отрыв магнитов от груза при транспортировании тяжелых грузов приводит к большим ударным нагрузкам. Для ликвидации этого недостатка были применены, кроме тяговых магнитов, еще нейтрализующие по концам привода [Л2].
Для увеличения тягового усилия привода он снабжался, размещенными вдоль рабочей ветви, дополнительными магнитами, установленными сополярно тяговым, а каждый тяговый магнит снабжен закрепленными на нем полюсными наконечниками, установленными с возможностью охвата дополнительных магнитов [Л3].
Основной недостаток указанного привода заключается в том, что усилие в приводе может быть увеличено за счет увеличения массы магнитов и, следовательно, габаритов привода или за счет использования дорогостоящих, например самарий-кобальтовых, магнитов, что нецелесообразно. Кроме того, тяговое усилие не регулируется, а конструкция в целом довольно сложна, так как имеет источник магнитного поля в виде стационарных магнитов и в виде магнитов тяговой цепи и при этом требует наличия нейтрализующих магнитов на входе и выходе рабочей ветви привода.
Наиболее близким заявляемому изобретению по технической сущности и достигаемому результату является привод конвейера, который содержит электродвигатель, соединенный с цепной передачей, на которой смонтированы парные магнитные элементы, которые подвижно входят в пазы неподвижных полюсных наконечников со встроенным в них управляемым электромагнитом. Полюсные наконечники со стороны рабочей ветви выполнены большего сечения, чем со стороны холостой ветви. Это позволяет уменьшить, при сохранении тягового усилия привода, притягивающее усилие в незагруженной ветви конвейера, что в конечном итоге положительно сказывается на КПД работы привода. Но это уменьшение притягивающего усилия на холостой ветви можно достичь только пропорционально отношения величины сечения полюсных наконечников на рабочей и холостой ветвях конвейера и не позволяет плавного регулирования тяговых усилий на ветвях устройства [Л4].
Техническим результатом заявленного изобретения является повышение КПД привода за счет отдельного устройства на груженой и холостой ветвях управляемых электромагнитов с автономными системами регулирования тяговых усилий.
Отличие предлагаемого изобретения от прототипа состоит в том, что на груженой и холостой ветвях конвейера устанавливаются неподвижные, управляемые системами регулирования тяговых усилий каждый. Это позволяет достигать необходимое тяговое усилие на груженой ветви, в зависимости от веса груза, не влияя на тяговое усилие в холостой ветви, которое устанавливается и регулируется независимо от параметров в груженой. Такое независимое устройство электромагнитов с автономными системами регулирования повышает надежность работы конвейера и КПД привода.
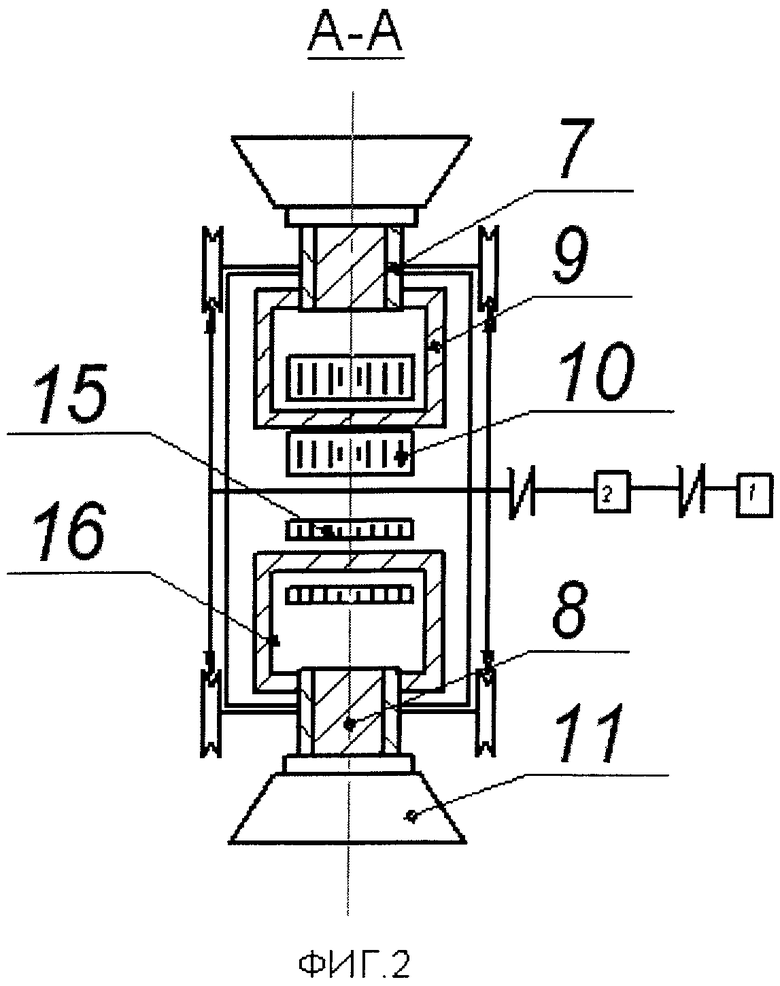
Предлагаемое изобретение иллюстрируется схемой стационарного привода конвейера (вид сбоку) - фиг. 1; на фиг. 2 - разрез А-А на фиг. 1.
Привод конвейера содержит электродвигатель 1, соединенный через редуктор 2 с цепной передачей, состоящей из ведущих звездочек 3, тяговых цепей 4 и ведомых звездочек 5. В звенья тяговых цепей 4 помещены магнитные элементы 6, выполненные каждый из пары ферромагнитных пластин 7 с диамагнитными прокладками 8. Магнитные элементы 6 подвижно входят в пазы, образуемые неподвижными полюсными наконечниками 9 и 16 со встроенными в них управляемыми электромагнитами 10 и 15.
Полюсные наконечники 9 и 16 обращены к грузоносителям 11 конвейера, имеющим ферромагнитые элементы 12. Полюсные наконечники 9 и электромагниты 10 со стороны рабочей ветви 13 конвейера выполнены большего сечения и размера, чем подобные элементы 16 и 15 со стороны холостой ветви 14. Система управления электромагнитами на каждой ветви конвейера автономны, независимы друг от друга.
Привод конвейера работает следующим образов. Вращательный момент двигателя 1 через редуктор 2 передается на ведущую звездочу 3. Усилия в верхней и нижней ветвях тяговых цепей 4 передаются на ферромагнитные пластины 7, которые притягиваются к ферромагнитным элементам 12 грузоносителей 11. Ферромагнитные пластины 7 перемещаются вдоль пазов, образованных полюсными наконечниками 9 и 16. Магнитные поля, создаваемые электромагнитами 10 и 15, распространяются по магнитным контурам образованным сердечниками электромагнитов, полюсными наконечниками 9 и 16, ферромагнитными пластинами 7 и ферромагнитными элементами грузоносителей, причем между ферромагнитными пластинами 7 и полюсными наконечниками 9 и 16 образуются скользящие магнитосъемники.
При запуске привода при выключенном питании электромагнитов 10 и 15 запускается двигатель 1. После разгона всей кинематической передачи через систему управления плавно увеличивается напряжение в обмотках электромагнитов 10 и 15 до страгивания с места грузоносителей 11. Затем транспортная система выводится на номинальный режим работы. В случае возникновения аварийной ситуации двигатель с таким устройством привода не выходит из строя, так как ферромагнитные пластиты 7 и вместе с тяговыми цепями 4 начинают скользить вдоль ферромагнитных элементов 12, реализуя принцип магнитофрикционной линейной муфты.
Разные по величине сечения полюсных наконечников 9 и 16, независимые магнитные поля, создаваемые электромагнитами 10 и 15, автономное управление тяговыми усилиями на грузовой и холостой ветвях позволяют снизить расход электроэнергии и, как следствие ,повышают КПД привода.
Источники информации
1. Патент США №3497056, кл. 198-203, 1970.
2. Авторское свидетельство СССР №839926, кл. В65G 49/00, 1974.
3. Авторское свидетельство СССР №839926, кл. В65G 49/00, 1979.
4. Авторское свидетельство СССР №1538419, кл В65G 23/18, 1982
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитофрикционный привод конвейера | 1982 |
|
SU1063734A1 |
| Привод конвейера | 1982 |
|
SU1051001A1 |
| Привод конвейера | 1979 |
|
SU839926A1 |
| Электромагнитно-фрикционный привод конвейера | 1983 |
|
SU1146249A1 |
| Магнитофрикционный привод конвейера | 1986 |
|
SU1350082A1 |
| Привод конвейера | 1981 |
|
SU1004229A1 |
| Магнитный цепной конвейер | 1986 |
|
SU1342830A1 |
| Магнитофрикционный привод конвейера | 1985 |
|
SU1461696A1 |
| Привод конвейера | 1985 |
|
SU1418210A1 |
| Магнитно-фрикционный электропривод ленточного конвейера | 1982 |
|
SU1093634A1 |
Привод конвейера содержит ведущие и ведомые звездочки, огибаемые бесконечно замкнутыми тяговыми цепями с закрепленными на них тяговыми магнитными элементами, взаимодействующими с ферромагнитными элементами грузоносителей конвейера. Привод снабжен неподвижно закрепленными отдельно на его грузовой и холостой ветвях электромагнитами с охватывающими их полюсными наконечниками, обращенными к грузоносителям конвейера. Магнитные элементы в виде пластин закреплены вертикально на тяговых цепях с возможностью скользящего контакта с полюсными наконечниками. Повышается надежность привода, снижаются энергозатраты. 1 з.п. ф-лы, 2 ил.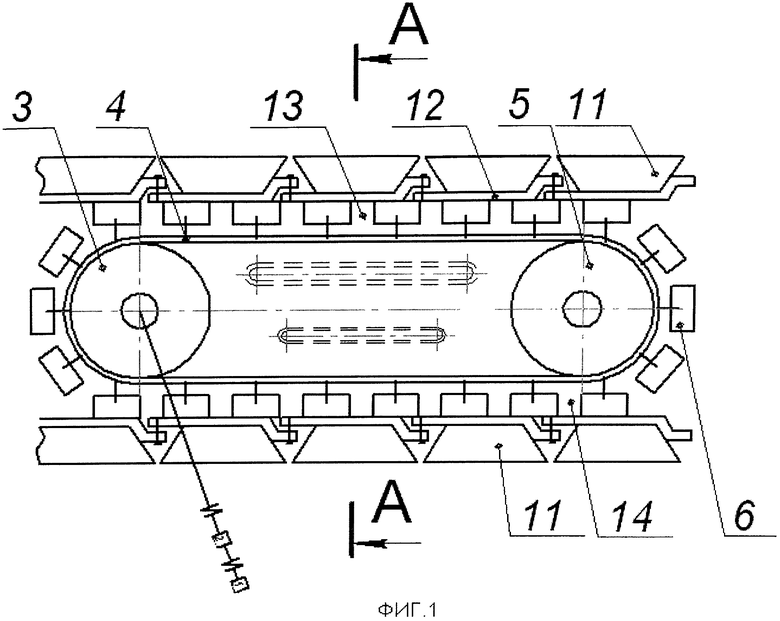
1. Привод конвейера, включающий ведущие и ведомые звездочки, огибаемые бесконечно замкнутыми тяговыми цепями с закрепленными на них тяговыми магнитными элементами, взаимодействующими с ферромагнитными элементами грузоносителей конвейера, отличающийся тем, что он снабжен неподвижно закрепленными отдельно на его грузовой и холостой ветвях электромагнитами с охватывающими их полюсными наконечниками, обращенными к грузоносителям конвейера, а магнитные элементы в виде пластин закреплены вертикально на тяговых цепях с возможностью скользящего контакта с полюсными наконечниками.
2. Привод по п.1, отличающийся тем, что электромагниты на грузовой и холостой ветвях имеют автономные системы регулирования тяговых усилий, а электромагнит с полюсным наконечником на холостой ветви значительно меньших размеров, чем на грузовой.
| Привод конвейера | 1985 |
|
SU1418210A1 |
| Магнитофрикционный привод конвейера | 1986 |
|
SU1350082A1 |
| Привод конвейера | 1981 |
|
SU1004229A1 |
| Привод конвейера | 1979 |
|
SU839926A1 |

