Изобретение относится к способу улучшения целостности коммуникаций в спутниковой навигационной системе по п. 1 формулы изобретения, пользовательской системы для спутниковой навигационной системы по п. 7 формулы изобретения и устройства для улучшения целостности коммуникаций в спутниковой навигационной системе по п. 10 формулы изобретения.
В публикации DE 102007050716 А1 описано, как можно улучшить целостность коммуникаций в спутниковой навигационной системе посредством того, что для различных наблюдательных станций спутниковой навигационной системы или групп наблюдательных станций спутниковой навигационной системы на пользовательские системы передается бюджет погрешностей, из которого затем, прежде всего отдельными пользовательскими системами, можно рассчитать скалярное значение, которое указывает на точность определения погрешности формирования навигационного сигнала. Тем самым скалярные значения, которые используют отдельные пользовательские системы, могут быть значительно меньше, так как скалярное значение может быть рассчитано в зависимости от территориального расположения пользовательской системы и его максимум не нужно рассчитывать в центральной станции спутниковой навигационной системы для всех пользовательских систем и передавать его на пользовательские системы. К тому же при расчете в пользовательской системе могут быть учтены требования отдельных пользовательских систем к непрерывности, благодаря чему не нужно выполнять высочайшие требования к непрерывности в каждой пользовательской системе.
Задачей данного изобретения является разработка способа и устройства, с помощью которых можно существенно улучшить целостность коммуникаций в спутниковой навигационной системе.
Данная задача решена с помощью способа улучшения целостности коммуникаций в спутниковой навигационной системе с признаками п. 1 формулы изобретения, пользовательской системой для спутниковой навигационной системы с признаками п. 6 формулы изобретения и устройством для улучшения целостности коммуникаций в спутниковой навигационной системе с признаками п. 9 формулы изобретения. Другие формы конструктивного выполнения являются предметом зависимых пунктов.
Изобретение базируется прежде всего на том, что дальномерные погрешности наблюдательных станций спутниковой навигационной системы влияют на точность определения погрешности посредством пользовательской системы иначе, чем погрешности синхронизации часов наблюдательных станций. Поэтому согласно изобретению погрешности подразделяются на коррелированные погрешности и все остальные погрешности, суждения о корреляции которых невозможны или не нужны, но в отношении которых действует предположение, что они некоррелированы. Погрешности синхронизации часов наблюдательных станций согласно изобретению классифицируются как коррелированные погрешности, и информация об их распределении передается вместе с навигационным сигналом спутника отдельно, то есть вне бюджета погрешностей согласно вышеупомянутой публикации DE 102007050716 А1. Передаваемая таким образом информация о распределении погрешностей синхронизации часов наблюдательных станций обеспечивает пользовательской системе возможность оценить точность наблюдения наземного сегмента и тем самым еще точнее определить целостность навигационного сигнала. Тем самым можно дополнительно улучшить общую целостность коммуникации в спутниковой навигационной системе. Далее, за счет изобретения скалярные значения для точности оценки погрешности, которые используются отдельными пользовательскими системами, становятся меньшими без необходимости установки большего количества аппаратных средств, так как моделирование погрешностей в пользовательской системе может производиться точнее.
Согласно одной конструктивной форме изобретения способа улучшения целостности коммуникаций в спутниковой навигационной системе, которая включает в себя космический сегмент с несколькими спутниками, которые передают навигационные сигналы для приема и обработки их пользовательскими системами для определения положения, и наземный сегмент с несколькими станциями наблюдения, которые контролируют спутники, при этом способ включает:
- определение распределения погрешностей синхронизации часов наблюдательных станций,
- передачу спутникам информации о распределении погрешностей синхронизации часов наблюдательных станций и
- прием навигационных сигналов от спутников пользовательскими системами и оценку содержащейся в навигационных сигналах информации о распределении погрешностей синхронизации часов для оценивания точности наблюдения наземным сегментом.
Также дополнительно к информации о распределении погрешностей синхронизации часов наблюдательных станций может передаваться бюджет погрешностей для различных наблюдательных станций или групп наблюдательных станций и бюджет может быть проанализирован, для чего из бюджета вычисляется скалярное значение, которое указывает на точность определения погрешности формирования навигационного сигнала. Бюджет погрешностей при этом может определяться и передаваться, как указано в вышеупомянутой публикации DE 102007050716 А1.
Информация о распределении погрешностей синхронизации часов наблюдательных станций или бюджет погрешностей различных наблюдательных станций или групп наблюдательных станций может передаваться на пользовательские системы вместе с навигационным сигналом или с коммуникационным сигналом.
Прежде всего информация о распределении погрешностей синхронизации наблюдательных станций может включать в себя оценку или прогноз распределения погрешностей синхронизации часов наблюдательных станций.
Помимо этого, определение распределения погрешностей синхронизации может включать в себя централизованный анализ данных о времени отдельных наблюдательных станций.
В следующей форме конструктивного выполнения изобретение предусматривает пользовательскую систему для спутниковой навигационной системы, прежде всего мобильный навигационный прибор, который выполнен для использования с предлагаемым способом и как описано выше.
Также согласно одной конструктивной форме изобретения может быть создана прежде всего пользовательская система для оценки точности наблюдения на основе принятой информации о распределении погрешности синхронизации часов наблюдательных станций и определения на основе этого риска целостности.
Далее в соответствии с одной формой выполнения изобретения может быть создана пользовательская система для оценки точности наблюдения таким образом, что может быть достигнута предопределенная непрерывность. Таким образом, пользовательская система в соответствии с ее требованиями к непрерывности может рассчитывать соответственно оптимизированное скалярное значение.
Наконец, в соответствии с одной формой выполнения изобретения предусмотрено устройство для улучшения непрерывности коммуникации в спутниковой навигационной системе, которая включает в себя космический сегмент с несколькими спутниками, которые излучают навигационный сигнал для приема и обработки пользовательскими системами, и наземный сегмент с несколькими наблюдательными станциями, которые наблюдают за спутниками, при этом устройство включает в себя следующее:
- средства для определения распределения погрешностей синхронизации часов наблюдательных станций и
- средства для передачи информации о распределении погрешностей часов наблюдательных станций.
Устройство подобного типа может размещаться, например, в наземном сегменте и оказывать влияние на целостность коммуникаций в спутниковой навигационной системе.
Также могут быть предусмотрены средства определения бюджета погрешностей для определения бюджета погрешностей для различных наблюдательных станций или групп наблюдательных станций, при этом средства для передачи информации о распределении погрешностей часов наблюдательных станций также выполнены для дополнительной передачи бюджета погрешностей.
Другие преимущества и возможности использования предлагаемого изобретения следуют из последующего описания в сочетании с показанными на чертежах примерами выполнения.
В описании, в формуле изобретения, в реферате и в чертежах используются применяемые в приведенном в конце списке ссылочных обозначений понятия и соответствующие им ссылочные обозначения.
На чертежах показано:
Фиг. 1 - спутниковая навигационная система с одним примером осуществления устройства для улучшения целостности коммуникаций в спутниковой навигационной системе согласно изобретению и
Фиг. 2 - блок-схема одного примера осуществления способа для улучшения целостности коммуникации в спутниковой навигационной системе согласно изобретению.
Далее одинаковые и/или функционально идентичные элементы могут быть обозначены одними и теми же ссылочными обозначениями.
Спутниковые системы глобальной навигации (GNSS; GNSS = глобальная навигационная спутниковая система, кратко - спутниковая навигационная система) используются для определения положения и навигации на земле и воздухе. Системы GNSS, например находящаяся в процессе создания европейская спутниковая навигационная система (далее называемая система Galileo или кратко Galileo), имеют включающую в себя несколько спутников спутниковую систему (космический сегмент), стационарную наземную систему приемных устройств с центральной вычислительной станцией (наземный сегмент), несколько наземных станций, а также регистрирующие станции Galileo (наблюдательные станции), а также пользовательские системы, которые анализируют и используют передаваемые по радио со спутников спутниковые сигналы прежде всего для навигации.
В GNSS точное определение положения пользователя требует как локальной, так и глобальной целостности. Прежде всего целостность означает, что, с одной стороны, GNSS в состоянии в течение определенного интервала времени предупреждать пользователя, если части GNSS не должны использоваться для навигации, например, при выходе системных компонентов из строя, и, что, с другой стороны, пользователь может доверять навигационным данным, которые он получает посредством спутниковых навигационных сигналов от спутников GNSS, прежде всего, что он может положиться на точность принятых навигационных данных.
В концепции целостности Galileo запланированы контроль каждого спутника со стационарной наземной приемной системы и передача соответствующих информационных сигналов в отношении характеристик каждого спутника на пользовательские системы, например сигналов Signal-ln-Space-Accuracy (SISA) спутника или простой индикации „Not OK" о вышедшем из строя спутнике.
Система Galileo также должна быть способна контролировать сигнал Signal-ln-Space (SIS) в пределах наземного сегмента путем использования измерений отдельных регистрирующих станций Galileo. С помощью известных положений регистрирующих станций Galileo можно оценить текущее положение спутника и тем самым максимальную погрешность спутника или передаваемого им в космос сигнала, так называемого Signal-ln-Space-Error (SISE).
Прогноз распределения SISE можно представить в форме распределения Гаусса с минимальным стандартным отклонением. Этот прогноз обозначается как Signal-ln-Space-Accuracy (SISA). С помощью SISA может быть описана разность между текущим 4-мерным положением (орбита и время) спутника и прогнозируемым 4-мерным положением, которое содержится в навигационной информации.
Однако оценка SISE представляет собой трудоемкий процесс, поэтому, как правило, предполагается, что распределение текущего SISE относительно значения проанализированного SISE может быть описано с помощью распределения Гаусса со стандартным отклонением, которое обозначается как Signal-ln-Space-Monitoring-Accuracy (SISMA). Таким образом, SISMA представляет собой точность оценки SISE для одного спутника.
В прежней концепции Galileo для передачи SISMA для каждого спутника передается скалярное значение, которое консервативно для каждого возможного положения пользовательской системы (положения пользователя). Из-за этого пропускная способность GNSS используется понапрасну, так как во многих положениях передается слишком большое значение, что приводит к затратной непрерывности коммуникации в GNSS.
Так как отдельные наблюдательные станции имеют относительно высокую вероятность выхода из строя, то, помимо этого, дополнительно необходимо заранее учесть в расчете скалярного значения возможные выходы из строя, при этом должно быть учтено столько выходов из строя, что могут быть выполнены также строжайшие требования к последовательности. Подобный учет снова ведет к слишком большому значению, прежде всего для пользовательских систем, которые не имеют таких высоких требований к последовательности. К тому же для расчета скалярного значения для каждого спутника самая худшая ситуация наблюдения в расчет не принимается, что существенно консервативнее, чем это зачастую требуется.
Наконец, должны учитываться и погрешности на основании наблюдательных станций, то есть, прежде всего, введенные наблюдательными станциями погрешности измерений. Эти погрешности влияют на точность наблюдения наблюдательными станциями и, прежде всего, могут возникать из-за погрешностей времени на наблюдательных станциях, например, из-за несинхронизированных часов на наблюдательных станциях. Погрешность часов на наблюдательной станции практически одинакова для всех проведенных этой наблюдательной станцией измерений, то есть она систематически появляется в измерениях и поэтому может классифицироваться как скоррелированная относительно выполненных измерений в отличие от других погрешностей, в отношении которых высказывания относительно возможной корреляции невозможны или не требуются.
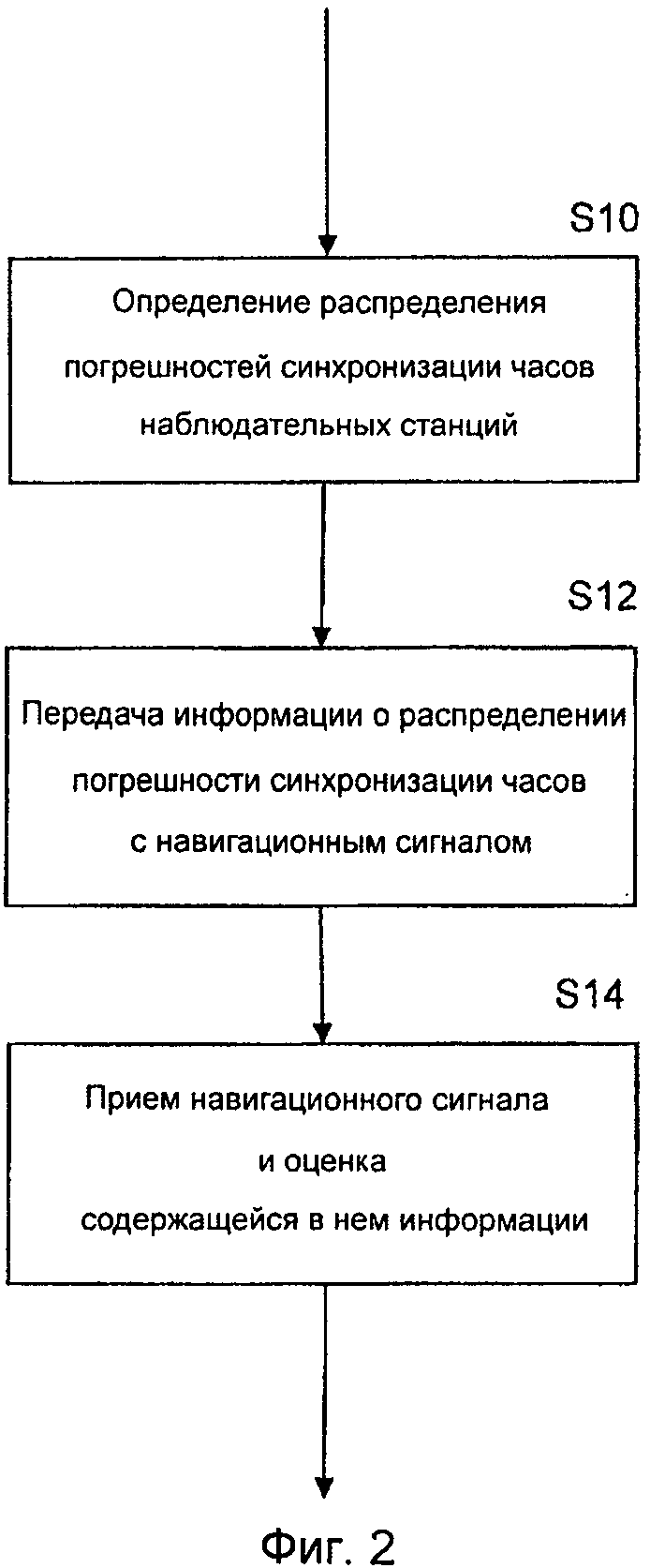
На фиг. 1 для наглядности целостности коммуникации показан пример спутниковой навигационной системы 10 с космическим сегментом 12 и наземным сегментом 20. Космический сегмент 12 включает несколько спутников 14, которые двигаются вокруг наземного сегмента 20 по соответствующим орбитам. Каждый спутник излучает навигационные сигналы 16, которые могут быть приняты пользовательскими системами 18, например мобильными навигационными приборами, а также наблюдательными станциями 22 наземного сегмента 20. Наблюдательные станции 22 предназначены, прежде всего, для наблюдения за спутниками 14 и координации целостности коммуникаций в спутниковой навигационной системе 10. Для этого они анализируют навигационные сигналы 16 или же проводят измерения за счет того, что они проверяют передаваемые в каждом навигационном сигнале 16 данные спутников 14, прежде всего орбиту и момент времени генерации сигнала, а также структуру сигнала. Наблюдательная станция 22 также может отправлять на спутники управляющую информацию 30, например, для оказания влияния на корректировку спутниковых данных или для воздействия на целостность коммуникаций в спутниковой навигационной системе 10, как это подробнее описывается ниже.
Для улучшения целостности коммуникаций в спутниковой навигационной системе 10 согласно изобретению определяется распределение погрешностей синхронизации часов наблюдательных станций. На основании выявленного распределения затем можно оценить или предсказать будущее распределение погрешностей синхронизации часов. Определенная таким образом информация о распределении погрешностей синхронизации часов наблюдательных станций посредством передаточных средств 28 на наблюдательной станции 22 передается на спутники 14, например, с управляющей информацией 30 и может распределяться вместе с навигационными сигналами 16 спутников 14 на пользовательские системы 18. При этом исходят из того, что погрешности синхронизации часов наблюдательных станций скоррелированы, в то время как, например, погрешности из-за эффекта задержки в ионосфере при передаче спутникового сигнала имеют сравнительно короткую длительность. За счет разделения погрешностей на погрешности синхронизации часов наблюдательных станций, которые, с одной стороны, классифицируются как скоррелированные, и на все остальные погрешности, которые с большой вероятностью нельзя принять за скоррелированные, можно улучшить целостность коммуникаций спутниковой навигационной системы 10, так как это обеспечивает пользовательским системам 18 возможность точнее отличать ухудшающие целостность спутниковой навигационной системы погрешности и поэтому лучше оценивать целостность принятого спутникового навигационного сигнала, как это разъясняется далее.
Каждая пользовательская система 18, которая принимает спутниковый навигационный сигнал 16 с информацией о распределении погрешностей синхронизации часов, может анализировать отдельный бюджет погрешностей так, что она посредством наземного сегмента определяет точность наблюдения. Определение может происходить, например, за счет того, что пользовательская система 18 из информации о распределении погрешностей часов вычисляет скалярное значение, которое представляет собой критерий точности наблюдения и учитывается при расчете следующего скалярного значения, которое показывает оценку погрешности генерации спутникового навигационного сигнала, с которым был передан бюджет погрешностей, то есть SISMA. Например, SISMA может ухудшиться, если вычисленное из бюджета погрешностей скалярное значение увеличивается, так как погрешности часов отрицательно воздействуют на точность наблюдения одной или нескольких наблюдательных станций.
Информация о распределении погрешностей синхронизации часов наблюдательных станций может быть установлена посредством средств 26 определения погрешностей синхронизации часов в наземном сегменте 20. Для этого данные часов отдельных наблюдательных станций 22 могут быть переданы для анализа на средства 26 определения погрешностей синхронизации часов. Затем из переданных данных средства 26, которые могут быть предусмотрены в централизованных технологических и управляющих частях наземного сегмента 20, вычисляют оценку распределения погрешностей синхронизации часов. Например, принятые данные о времени могут непрерывно сравниваться с центральными часами наземного сегмента 20 и так может быть определено распределение отклонения данных о времени от наблюдательных станций 22 от центральных часов, то есть распределение погрешностей синхронизации часов. Выявленное распределение погрешностей синхронизации часов средствами 26 вводится в целостность коммуникаций в спутниковую навигационную систему 10 за счет того, что информация о распределении погрешностей часов передается на передающие средства 28 от средств 26 для передачи на спутники 14. Передающие средства 28 могут располагаться на наблюдательной станции 22 и предназначены для того, чтобы принятые средствами 26 сведения, например, посредством управляющих сообщений 30 передавались на отдельные спутники 14, которые, в свою очередь, также могут передавать принятую информацию о распределении погрешностей синхронизации часов вместе со своими спутниковыми навигационными сигналами 16 на пользовательские системы 18.
На фигуре 2 на краткой схеме показан предлагаемый алгоритм способа улучшения целостности коммуникаций в спутниковой навигационной системе 10. На первом этапе S10 определяют распределение погрешностей синхронизации часов наблюдательных станций. Определение включает в себя вычисление оценки распределения погрешности синхронизации часов. На следующем этапе S12 рассчитанную оценку распределения погрешности синхронизации часов передают сначала на спутники, которые, в свою очередь, передают свои навигационные сигналы назад на наземный сегмент для оценки посредством пользовательских систем. На этапе S14 принимают навигационный сигнал спутника и содержащийся в нем анализ распределения погрешности синхронизации часов наземных станций за счет того, что выполняют оценку анализа точности наблюдения наземным сегментом.
Ссылочные обозначения
Изобретение относится к области приборостроения и может найти применение в системах контроля целостности коммуникаций спутниковых навигационных систем. Технический результат - расширение функциональных возможностей. Для этого спутниковая навигационная система (10) включает в себя космический сегмент (12) с несколькими спутниками (14), которые излучают навигационные сигналы (16) для приема и обработки пользовательскими системами (18) для определения положения, и наземный сегмент (20) с несколькими наблюдательными станциями (22), которые наблюдают за спутниками (14), при этом способ включает определение распределения погрешностей синхронизации часов наблюдательных станций (S10), передачу информации о распределении погрешностей синхронизации часов наблюдательных станций (S12) и прием и оценку информации о распределении погрешностей синхронизации часов за счет того, что на основании информации оценивают точность наблюдения наземным сегментом (S14). 3 н. и 8 з.п. ф-лы, 2 ил.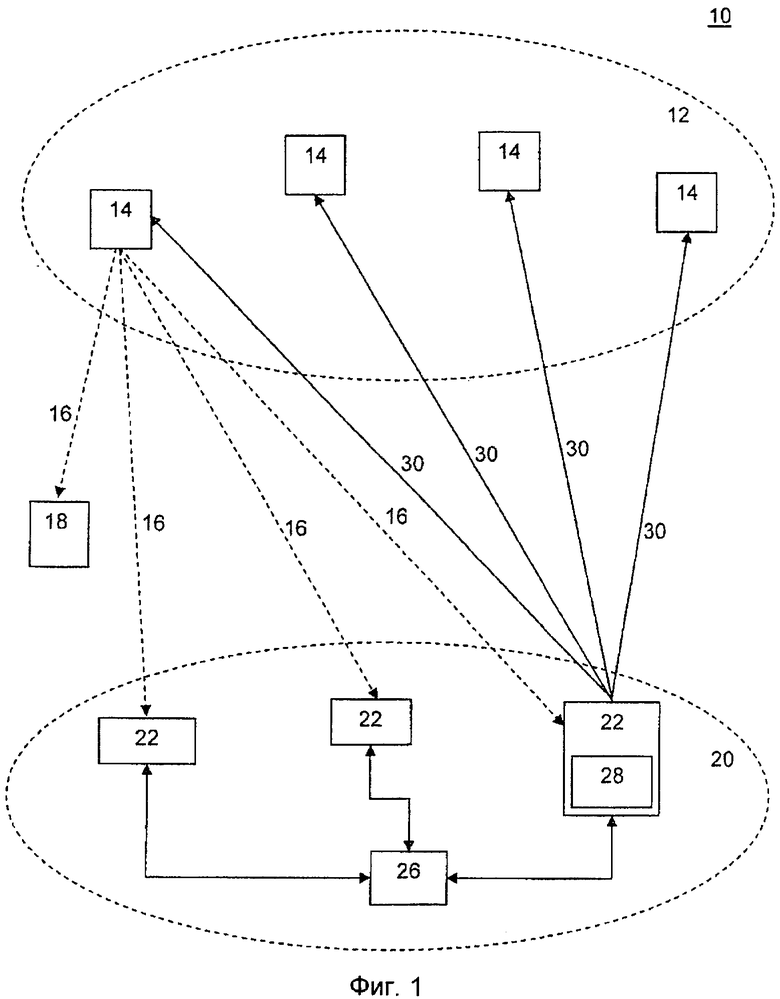
1. Способ улучшения целостности коммуникаций в спутниковой навигационной системе (10), которая включает в себя космический сегмент (12) с несколькими спутниками (14), которые излучают навигационные сигналы (16) для приема и обработки пользовательскими системами (18) для определения положения, и наземный сегмент (20) с несколькими наблюдательными станциями (22), которые наблюдают за спутниками (14), включающий:
- определение (S10) распределения погрешностей синхронизации часов наблюдательных станций,
- передачу (S12) спутникам (14) информации о распределении погрешностей синхронизации часов наблюдательных станций и
- прием (S14) навигационных сигналов (16) от спутников (14) пользовательскими системами (18) и оценку содержащейся в навигационных сигналах информации о распределении погрешностей синхронизации часов для оценивания точности наблюдения наземным сегментом.
2. Способ по п. 1, отличающийся тем, что дополнительно к информации о распределении погрешностей синхронизации часов наблюдательных станций также передают бюджет погрешностей для различных наблюдательных станций или групп наблюдательных станций и анализируют бюджет погрешностей, для чего из бюджета погрешностей вычисляют скалярное значение, которое указывает на точность определения погрешности формирования навигационного сигнала.
3. Способ по п. 1, отличающийся тем, что информацию о распределении погрешностей синхронизации часов наблюдательных станций передают на пользовательские системы вместе с навигационным сигналом или с коммуникационным сигналом.
4. Способ по п. 2, отличающийся тем, что бюджет погрешностей различных наблюдательных станций или групп наблюдательных станций передают на пользовательские системы вместе с навигационным сигналом или с коммуникационным сигналом.
5. Способ по одному из пп. 1-4, отличающийся тем, что информация о распределении погрешностей синхронизации наблюдательных станций включает в себя оценку или прогноз распределения погрешностей синхронизации часов наблюдательных станций.
6. Способ по п. 5, отличающийся тем, что определение распределения погрешностей синхронизации включает в себя централизованную оценку данных о времени отдельных наблюдательных станций.
7. Пользовательская система (18) для спутниковой навигационной системы, прежде всего мобильный навигационный прибор, который выполнен для использования со способом по одному из предшествующих пунктов.
8. Пользовательская система по п. 7, отличающаяся тем, что она также выполнена для того, чтобы на основании принятой информации о распределении погрешностей синхронизации времени наблюдательных станций анализировать точность наблюдения и определять из этого риск целостности.
9. Пользовательская система по п. 8, отличающаяся тем, что она также выполнена для оценки точности наблюдения так, что может быть достигнута предопределенная непрерывность.
10. Устройство (24) для улучшения целостности коммуникаций в спутниковой навигационной системе (10), которая включает в себя космический сегмент (12) с несколькими спутниками (14), которые излучают навигационные сигналы (16) для приема и обработки пользовательскими системами (18) для определения положения, и наземный сегмент (20) с несколькими наблюдательными станциями (22), которые наблюдают за спутниками (14), включающее:
средства (26) для определения распределения погрешностей синхронизации часов наблюдательных станций и
средства (28) для передачи информации о распределении погрешностей часов наблюдательных станций.
11. Устройство по п. 10, также отличающееся средствами определения бюджета погрешностей для определения бюджета погрешностей для различных наблюдательных станций или групп наблюдательных станций, при этом средства (28) для передачи информации о распределении погрешностей синхронизации часов наблюдательных станций также выполнены для дополнительной передачи бюджета погрешностей.
| DE 102007050716 А1, 23.04.2009 | |||
| WO0060420 A1, 12.10.2000 | |||
| К.ОДУАН, Б.ГИНО Измерение времени | |||
| Основы GPS | |||
| М.: Техносфера, 2002, с.115-124 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2115946C1 |

