Изобретение относится к рабочей площадке и соответствующему ее применению для возведения или обновления кладки/футеровки металлургического ковша, в частности конвертера. При этом рабочая площадка выполнена так, что эргономически трудная работа укладки кирпичей выполняется с помощью робота, в то время как одновременно в ковше могут находиться один или несколько рабочих с целью контролирования работы робота и выполнения других работ.
Известные до настоящего времени устройства для кладки, соответственно рабочие площадки, основаны, как правило, на том, что в ковш вдвигается платформа, которая обеспечивает место для нескольких рабочих, которые подаваемые с помощью подъемника на платформу на поддонах кирпичи сгружают вручную или с использованием подъемных приспособлений с поддонов и устанавливают в их конечное положение. Недостатком этого метода является большая нагрузка рабочих за счет веса кирпичей, соответственно, затраты времени, связанные с использованием подъемных приспособлений.
Кроме того, из уровня техники известны автоматические устройства для кладки на основе роботов, например, известное из ЕР 2199719 А2 устройство. Недостатком этого уровня техники является ограниченная гибкость, которая следует из полностью автоматического решения. Так, проблематичным является распознавание дефектов автоматической кладки, и устранение неисправностей в системе требует очень больших затрат.
Из US 4688773 известно устройство, которое обеспечивает возможность кладки конвертера сверху, а также выполнено с возможностью поворота. При этом решение предусматривает использование двух платформ, расположение которых в пространстве направлено не на совместную работу рабочих и роботов, а лишь на выполнение функции контролирования.
Также известно решение по дополнению автоматической кладки участком управления и контролирования, например, из DE 3932145 А1 или DE 4321299 А1. Этот подход имеет два недостатка. С одной стороны, геометрическое расположение зоны работы рабочих в виде контрольного стенда над роботом в конвертерах создает проблемы, поскольку в них имеется лишь очень немного места над собственно ковшом. С другой стороны, при таком расположении можно контролировать кладку лишь с расстояния в несколько метров. Однако наблюдение и проверки на близком расстоянии невозможны, и вмешательство и исправление трудновыполнимы. Совместная работа, при которой задачи могут быть разделены между человеком и машиной, невозможна.
В основу изобретения положена задача дальнейшего усовершенствования известной рабочей площадки так, что рабочему обеспечивается возможность контролирования работы робота или результата его работы на первой рабочей поверхности, например, на первом участке стенки, с близкого расстояния, в то время как робот может одновременно продолжать работу в своей рабочей зоне на второй рабочей поверхности, например, втором участке стенки.
Эта задача решена с помощью предмета пункта 1 формулы изобретения. Этот предмет характеризуется тем, что по меньшей мере одна рабочая зона робота и по меньшей мере одна рабочая зона рабочего выполнены в виде сектора или сегмента на рабочей платформе на одинаковой высоте и что рабочая зона рабочего включает по меньшей мере один второй периферийный участок рабочей платформы.
Выражение «на одинаковой высоте» исключает расположение рабочей зоны робота и рабочей зоны рабочего друг над другом. В противоположность этому за счет этого выражения не исключены возможные различия уровня дна рабочей платформы или применение лестниц или цоколей в рабочих зонах.
Для обеспечения возможности как для роботов, так и для рабочих достижения не только ограниченного круглого дугового участка окружной рабочей поверхности, например, стенки металлургического ковша, рабочая платформа выполнена с возможностью вращения. Вращение может осуществляться во время работы как непрерывно, так и согласно такту в зависимости от того, какой участок ковша должен обрабатываться роботом или рабочим.
Как рабочая зона робота, так и рабочая зона рабочего включают различные периферийные участки рабочей платформы. Включение периферийного участка в рабочую зону рабочего предпочтительно позволяет рабочему контролировать работу робота или результат его работы на первой рабочей поверхности, например, первом участке стенки, с близкого расстояния, в то время как робот одновременно может продолжать работу в своей рабочей зоне на второй рабочей поверхности, например, втором участке стенки. При необходимости соседнее расположение рабочей зоны рабочего и робота обеспечивает возможность вмешательства рабочего в работу робота, естественно всегда с соблюдением всех требований безопасности. Таким образом, можно предпочтительно быстро и гибко реагировать на ошибки и проблемы.
Рабочая площадка с раздельными рабочими зонами робота и рабочего выполнена так, что возможно одновременное использование робота и рабочего на небольшом пространственном расстоянии, без создания роботом опасности для рабочего и без необходимости работы робота с очень небольшими скоростями вследствие этой близости.
Согласно первому предпочтительному примеру выполнения рабочая платформа разделена на рабочую зону робота и рабочую зону рабочего, при этом обе зоны отделены друг от друга устройством безопасности. Устройство безопасности обеспечивает возможность совместной работы рабочих и (промышленных) роботов. Робот может работать лишь тогда, когда в его зоне нет человека, т.е. включено устройство безопасности. Робот может в своей рабочей зоне двигаться с высокой скоростью, без создания опасности для рабочих, которые находятся в рабочей зоне рабочего. Также вхождение рабочего в рабочую зону робота невозможно без разрешения доступа устройством безопасности и остановки при необходимости робота. Однако когда робот остановлен или демонтирован, рабочий может входить в рабочую зону робота через проход/дверь в устройстве безопасности и использовать ее в качестве расширенной или второй рабочей зоны рабочего.
Внутри рабочей зоны робота находится подъемник для рабочих средств.
Рабочая платформа опирается, например, на базовую платформу, которая предпочтительно соединена без возможности проворачивания с подъемным приспособлением для вертикального перемещения рабочей платформы. Рабочая платформа в качестве верхней стороны может вращаться на базовой платформе в качестве нижней стороны и может поворачиваться вокруг подъемника.
В рабочей зоне робота на рабочей платформе находится (промышленный) робот, предпочтительно выполненный в виде шестиосного робота. Робот служит, например, для снятия кирпичей с поддонов, которые подаются вверх с помощью центрального подъемника, и для непосредственной кладки принимаемых при этом кирпичей.
Робот в качестве робота кладки работает предпочтительно с расположенными слоями на поддоне кирпичами так, что кирпичи можно укладывать непосредственно в последовательности их расположения слоями.
Для достижения этого снаружи металлургического ковша предусмотрена зона, в которой, соответственно, кирпичи заранее расположены на поддонах. Для достижения высокой скорости и надежности всей системы особенно предпочтительно выполнять предварительное размещение на поддонах с помощью группы обслуживающих роботов.
Для обеспечения возможности предварительного размещения на поддонах робот для кладки и обслуживающий робот должны знать последовательность кирпичей, в которой они должны укладываться. При этом последовательность кирпичей, соответственно, предварительно планируется на основе заданного плана кладки и выполняемых в ковше измерений с помощью датчиков, например измерений с помощью лазерного сканера или камер 3D. Предпочтительно такой датчик может быть установлен на роботе.
Ниже приводится подробное описание изобретения со ссылками на прилагаемые чертежи, на которых изображено:
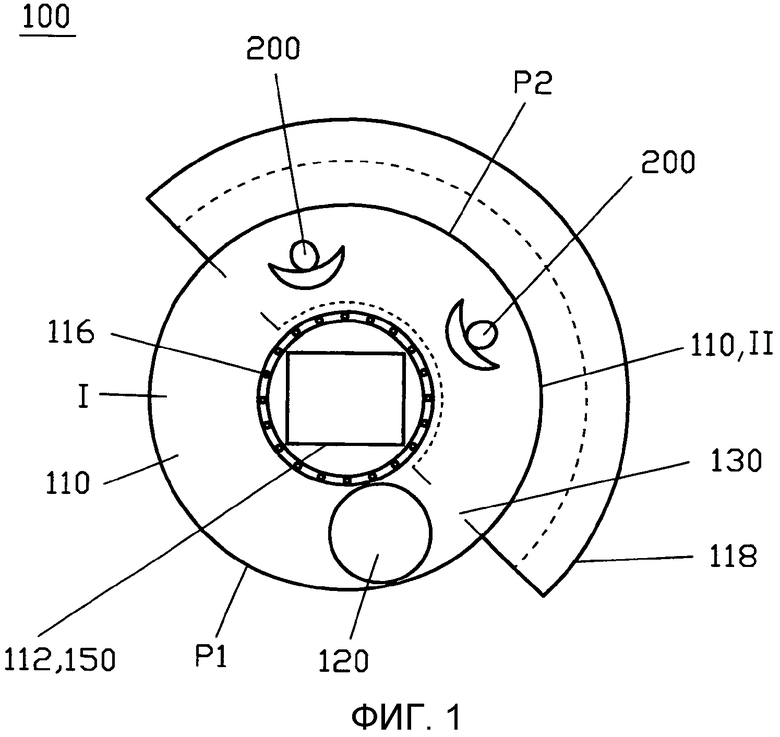
фиг.1 - рабочая площадка, согласно изобретению, на виде сверху; и
фиг.2 - разрез рабочей площадки, согласно изобретению.
Как показано на фиг.1, рабочая платформа 110 выполнена так, что она может вращаться вокруг центральной шахты 112 подъемника. Рабочие 200 могут находиться в обозначенной как рабочая зона II рабочего части рабочей платформы, которая отделена с помощью устройства 130 безопасности, например, загородкой, от рабочей зоны I робота. Рабочая зона I робота включает первый периферийный участок Р1, а рабочая зона II рабочего включает второй периферийный участок Р2. Устройство 130 безопасности выполнено так, что обеспечивается возможность безопасной работы рабочих 200 в рабочей зоне II рабочего при одновременной работе робота 120 в рабочей зоне I робота. Для этого устройство безопасности может быть выполнено в виде защитной ограды, предпочтительно с проходной дверью, для разделения в пространстве рабочих зон рабочего и робота и/или в виде защитной электроники, соответственно, защитного модуля программного обеспечения для мгновенного выключения робота 120 при приближении рабочего 200. Внутри рабочей зоны робота смонтирован (промышленный) робот 120, предпочтительно на цоколе 1. Рабочую зону II рабочего во время кладки можно при необходимости расширять в радиальном направлении или периферийном направлении с помощью, например, навешиваемых опорных элементов 118, с целью обеспечения возможности для рабочих непосредственного приближения к обработанной перед этим роботом или еще подлежащей обработке рабочей поверхности, например, к внутренней стороне конвертера. В рабочей зоне робота также могут быть предусмотрены такие периферийные расширения, однако они не изображены на фиг.1.
На фиг.2 показана эта рабочая площадка 100 сбоку. Рабочая платформа 110 с роботом 120 и рабочими 200 вдвинута, например, в конвертер 400. Рабочая площадка 100 содержит подъемное приспособление 140 для вертикального перемещения рабочей платформы 110. Для этого рабочая платформа 110 установлена с помощью поворотной опоры 116, см. фиг.1, на базовой платформе 142, при этом базовая платформа 142 предпочтительно соединена без возможности проворачивания с удаленным от пола концом подъемного приспособления 140.
Рабочую площадку можно с помощью подвижного устройства 160 перемещать по полу 11 металлургического цеха.
В показанном на фиг.2 варианте выполнения подъемник 150 соединен с горизонтальным транспортировочным устройством 500, которое транспортирует поддоны непосредственно из участка предварительной загрузки поддонов к подъемнику 150. При этом поддоны 320 предварительно загружаются с помощью группы обслуживающих роботов 14, при этом кирпичи 300 снимаются с поддонов изготовителя кирпичей и штабелируются на поддонах 320 в правильной последовательности в соответствии с планом кладки.
Перечень позиций
1 - Цоколь
11 - Пол металлургического цеха
110 - Рабочая платформа
112 - Шахта подъемника
116 - Поворотная опора
118 - Опорные элементы
120 - Робот
130 - Устройство безопасности
140 - Подъемное приспособление
142 - Базовая платформа
150 - Подъемник
160 - Подвижное устройство
200 - Рабочий
300 - Кирпичи
320 - Поддон
400 - Металлургический ковш, в частности, конвертер
Р1 - Периферийный участок
Р2 - Периферийный участок
I - Рабочая зона робота
II - Рабочая зона рабочего
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированной огнеупорной футеровки печей и роботизированный комплекс для его осуществления | 2018 |
|
RU2700435C2 |
| КАРУСЕЛЬНО-КОЛЬЦЕВАЯ ПЕЧЬ ДЛЯ ИЗГОТОВЛЕНИЯ КЕРАМИЧЕСКОГО КИРПИЧА | 2002 |
|
RU2206032C1 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА КОНВЕРТЕРОВ:^ИБЛИО"И;^М.А | 1967 |
|
SU197641A1 |
| Способ возведения конструкций из мелкоштучных изделий, робот-манипулятор и комплекс для его осуществления | 2021 |
|
RU2754505C1 |
| Машина для футеровки металлургических ковшей | 1977 |
|
SU686817A1 |
| Устройство для транспортировки материала в виде кирпича для огнеупорной облицовки резервуара с отверстием и выступом | 1978 |
|
SU1176824A3 |
| Машина для футеровки металлургических ковшей | 1977 |
|
SU654350A1 |
| Навесное устройство к грузоподъемной машине | 1987 |
|
SU1527140A1 |
| Устройство для транспортировки кирпича при кладке стен резервуаров металлургических печей | 1976 |
|
SU955868A3 |
| ПРОИЗВОДСТВЕННАЯ СИСТЕМА ДОМЕННАЯ ПЕЧЬ - КОНВЕРТЕР НА БАЗЕ РЕЛЬСОВОЙ ПЛАТФОРМЫ С РЕЗЕРВУАРОМ ДЛЯ ЖИДКОГО ЧУГУНА И СПОСОБ ЕЕ РАБОТЫ | 2020 |
|
RU2819401C1 |
Изобретение относится к области металлургии, в частности к рабочей площадке для возведения или обновления футеровки металлургического ковша. Рабочая площадка содержит рабочую платформу, по меньшей мере один робот для выполнения кладки, расположенный по меньшей мере в одной рабочей зоне, имеющей форму сектора или сегмента, и по меньшей мере одну рабочую зону для выполнения работ в ней рабочим, которая содержит по меньшей мере один периферийный участок рабочей платформы. Рабочая платформа выполнена поворотной. На поворотной рабочей платформе расположено устройство безопасности в виде защитной ограды, отделяющей рабочую зону робота от рабочей зоны рабочего, или в виде защитного модуля программного обеспечения для мгновенного выключения робота. Использование изобретения обеспечивает возможность контроля работы робота рабочим при их совместной работе. 2 н. и 7 з.п. ф-лы, 2 ил.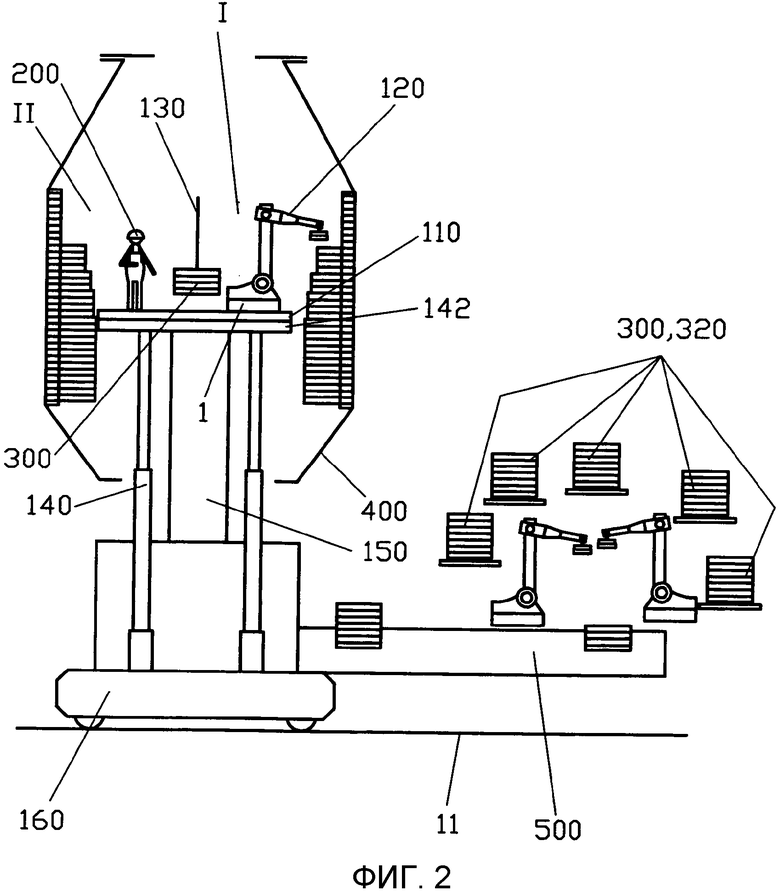
1. Рабочая площадка (100) для кладки футеровки, содержащая
рабочую платформу (110),
по меньшей мере один робот (120) для выполнения кладки, расположенный по меньшей мере в одной имеющей форму сектора или сегмента рабочей зоне (I) робота (120), при этом рабочая зона (I) робота (120) содержит первый периферийный участок (P1) рабочей платформы, и
по меньшей мере одну рабочую зону (II) для выполнения работ в ней рабочим, при этом рабочая зона (II) выполнена на рабочей платформе (110) в форме сектора или сегмента и содержит по меньшей мере один второй периферийный участок (P2) рабочей платформы,
отличающаяся тем, что
рабочая платформа (110) выполнена поворотной,
робот (120) с рабочей зоной (I) расположен на поворотной рабочей платформе (110), и
рабочая зона (I) робота (120) и рабочая зона (II) выполнены на поворотной рабочей платформе (110) на одинаковой высоте, и
на поворотной рабочей платформе (110) расположено устройство (130) безопасности в виде защитной ограды, отделяющей рабочую зону (I) робота (120) от рабочей зоны (II) с возможностью безопасного нахождения в рабочей зоне (II) при работе робота (120) в рабочей зоне (I), или в виде защитного средства электроники, соответственно, в виде защитного модуля программного обеспечения для мгновенного выключения робота (120) при приближении рабочего.
2. Рабочая площадка (100) по п. 1, отличающаяся тем, что для вертикального перемещения поворотной рабочей платформы (110) она снабжена подъемным приспособлением (140).
3. Рабочая площадка (100) по п. 2, отличающаяся тем, что подъемное приспособление (140) имеет неповоротную базовую платформу (142), на которой установлена поворотная рабочая платформа (110) с помощью поворотной опоры (116).
4. Рабочая площадка (100) по любому из пп. 1-3, отличающаяся тем, что рабочая платформа (110) выполнена с возможностью поворота непрерывно или согласно такту.
5. Рабочая площадка (100) по любому из пп. 1-3, отличающаяся тем, что она снабжена подвижным устройством (160) для ее бокового перемещения.
6. Рабочая площадка (100) по п. 4, отличающаяся тем, что поворотная рабочая платформа (110) и базовая платформа (142) выполнены каждая в виде перфорированного диска с центральным отверстием (112), при этом оба отверстия предпочтительно независимо от положения поворота рабочей платформы по меньшей мере частично расположены соосно друг с другом в рабочей зоне (I) робота (120), при этом для транспортировки рабочих материалов через отверстия (112) в рабочую зону (I) робота (120) рабочая площадка (100) снабжена подъемником (150), например, в виде цепного транспортера.
7. Рабочая площадка по п. 6, отличающаяся тем, что в качестве рабочих материалов использованы кирпичи (300).
8. Рабочая площадка (100) по п. 7, отличающаяся тем, что кирпичи (300) уложены на поддоне (320) с возможностью захвата друг за другом для кладки их в последовательном расположении слоями с получением стенки.
9. Применение рабочей площадки (100) для кладки футеровки по любому из пп. 1-8 для кладки футеровки металлургической емкости в виде конвертера.
| US 4688773 A, 25.08.1987 | |||
| DE 3932145 A1,10.05.1990 | |||
| Способ получения азотно-фосфорного удобрения | 1928 |
|
SU13559A1 |
| Устройство для футеровки глуходонного конвертера | 1986 |
|
SU1423900A1 |

