Группа изобретений относится к области строительства и может быть использована при возведении строительных и иных конструкций, в том числе малоэтажных и многоэтажных зданий и сооружений различного назначения, изготовления частей конструкций простой и сложной геометрической формы.
В современном строительстве сертифицированные технологии возведения конструкций из мелкоштучных материалов, таких как кирпичи, камни или блоки, основаны на применении ручного труда. Мелкоштучные изделия, уложенные на поддоны, доставляются на строительную площадку и транспортируются на рабочие места краном или подъемным погрузчиком.
Клеевой раствор для кладки доставляется с завода, либо готовится на строительной площадке и так же распределяется по отдельным рабочим местам, для чего предусмотрены соответствующие транспортные контейнеры и оборудование. Выполнение кладки осуществляется каменщиком под контролем бригадира и мастера в соответствии с проектной документацией. Каменщик выбирает и перемещает с поддонов соответствующий кладочному плану тип мелкоштучного изделия, наносит на него подходящий раствор и устанавливает элемент в конструкцию. В ходе работы каменщик и мастер должны контролировать правильность перевозки и заполнение раствором швов кладки, вертикальность, горизонтальность и прямолинейность поверхностей и углов, толщину кладки, размеры простенков и проемов и др.
Работа каменщика физически утомительна, травмоопасна и часто выполняется в неблагоприятных погодных условиях. Она требует от него высокого мастерства, концентрации и больших физических усилий. Все это делает процесс возведения конструкций медленным и трудоемким.
Возведение конструкций из мелкоштучных изделий с применением ручной силы отличается низкой производительностью и не стандартным качеством готовых конструкций по причине наличия человеческого фактора.
Из уровня техники известны установка для кладки кирпича и способ кладки кирпича с её применением (Патент РФ № 2047714, опубл. 10.11.95). Установка содержит опорно-ходовое устройство с телескопической колонной и установленной на ней несущей консолью, устройство для подачи кирпича в виде многозвенного манипулятора, на свободном конце которого смонтирован захват для кирпича, устройство ориентирования и укладки кирпича, выполненное в виде концентрично размещенных направляющей и подвижной относительно нее подающей труб прямоугольного поперечного сечения и соосно расположенного в направляющей трубе гидроцилиндра, шток которого имеет на конце прямоугольный толкатель, размещенный в полости подающей трубы с возможностью продольного перемещения, при этом направляющая труба имеет закрепленные на ее внешней поверхности два противолежащих наклонных рольганга, на внутренней поверхности поворотные упоры, а подающая труба имеет смонтированные на ее внешней поверхности с помощью осей кулачки, взаимодействующие с поворотными упорами, загрузочные окна, ориентированные к рольгангам, установленные на двух примыкающих сторонах подающей трубы подпружиненные ролики и заостренную нижнюю кромку, и устройство подачи раствора.
Способ возведения стен с применением данной установки включает перевод установки для кладки с колес на опоры, выставление её по уровню, смонтированному на установке; загрузку раствора в устройство для подачи раствора; подачу кирпича первым каменщиком посредством устройства для подачи кирпича на рольганг укладчика кирпича; непрерывную подачу раствора по гибкому рукаву на возводимую стену; управление вторым каменщиком с пульта установки перемещением укладчика кирпича вдоль стены и включением/выключением укладчика для укладки кирпича.
Данные решения позволяют увеличить скорость кладки и облегчить процесс для рабочего, но также обладают рядом недостатков. Предложенная установка для укладки кирпича не может работать без участия каменщиков и других рабочих. При этом нахождение каменщика рядом с работающим манипулятором на подвижной платформе небезопасно. Большая и важная часть работ при возведении конструкций с применением данного способа остается с привлечением рабочих. В связи с этим известный способ кладки кирпича с применением установки не является высокопроизводительным и не обеспечивает необходимое качество готовых конструкций. Кроме того, известная установка укладывает кирпич только в прямолинейные конструкции, и при этом не отличается мобильностью, что ограничивает возможности её использования при возведении более сложных строительных конструкций из кирпича, а также для строительства многоэтажных и высотных зданий.
Из уровня техники также известны устройство автоматической кладки и способ кладки с его применением (Патент РФ № 2740508, опубл. 14.01.2021). Устройство для автоматической укладки кирпича содержит самодвижущуюся тележку с установленной на ней вертикальной опорой, по которой перемещается горизонтальная направляющая, перемещающуюся по горизонтальной направляющей платформу, площадку для временного хранения кирпичей и раствор, дозатор, вращающуюся ёмкость для хранения раствора, механическую руку на площадке и на платформе, транспортёр, расположенный вдоль горизонтальной направляющей, по которому подаются кирпичи при помощи механической руки от площадки для временного хранения кирпичей и раствора, при этом устройство выполнено с возможностью подключения к компьютеру и управления им по заданной программе, так что самодвижущаяся тележка выполнена с возможностью перемещения как единое целое вдоль оси X по рельсам, а отдельные части конструкции, такие как горизонтальная направляющая, перемещающаяся платформа, площадка для временного хранения кирпичей и раствора, механическая рука на платформе, дозатор, механическая рука на площадке, вращающаяся ёмкость для хранения раствора, транспортёр, выполнены с возможностью перемещения относительно других частей по осям X, Y, Z, а также с возможностью совершать повороты на определенный угол.
Известный способ включает нанесение цементного раствора по заданным в программе координатам для одного кирпича, установку кирпича в конструкцию с помощью механической руки, располагая его по заданным в программе координатам.
Данные решения позволяют сократить применение ручного труда при непосредственной кладке стен, однако большая часть важных технологических операций также осуществляется с привлечением рабочих. Известные решения требуют монтажа устройства для укладки на объекте, предварительного размещения рабочими или с помощью технических средств на площадке для временного хранения уже отобранных кирпичей перед началом возведения конструкции, а также дополнительного участия работников для контроля качества возведения конструкций, что может негативно сказываться на производительности и качестве готовых конструкций. Устройство для автоматической укладки кирпича работает по заранее заданному алгоритму возведения конструкций из кирпича и установленным программой координатам, что значительно ограничивает его функциональные возможности. Кроме того, данное устройство для автоматической укладки кирпича также не отличается мобильностью, что ограничивает возможности его использования при возведении более сложных строительных конструкций из кирпича, а также для строительства многоэтажных и высотных зданий.
Задачей, на решение которой направлена группа изобретений, является разработка лишенных недостатков известных аналогов способа возведения конструкций из мелкоштучных изделий, мобильного робота-манипулятора и комплекса для его осуществления, применяемых в частности в многоэтажном и высотном строительстве, а также расширение арсенала технических средств указанного назначения.
Технический результат предложенной группы изобретений заключается в повышении производительности при возведении конструкций из мелкоштучных изделий при одновременном повышении качества возводимых конструкций и обеспечении повторяемости качества кладки из мелкоштучных изделий, сокращении применения ручного труда и оптимизации технологических процессов.
Технический результат достигается тем, что способ возведения конструкций из мелкоштучных изделий осуществляется с применением мобильного робота-манипулятора и включает в себя выполнение технологических операций: чтение файла проекта; автоматическое позиционирование робота-манипулятора на монтажном горизонте с привязкой к соответствующему листу проекта с применением технического зрения; распознавание и выбор роботом-манипулятором с применением технического зрения типа мелкоштучных изделий согласно проекту из имеющихся в зоне действия робота-манипулятора; захват роботом-манипулятором мелкоштучного элемента с места складирования, расположенного в зоне действия робота-манипулятора; проверка роботом-манипулятором целостности захваченного мелкоштучного элемента с применением технического зрения; нанесение роботом-манипулятором на поверхность мелкоштучного элемента клеящего состава; установка роботом-манипулятором элемента в конструкцию в соответствии с проектом; возведение роботом-манипулятором конструкции из мелкоштучных изделий путем необходимого количества повторений по меньшей мере части вышеописанных операций.
Целесообразно, чтобы после чтения файла проекта осуществлялся выбор монтажного горизонта по проекту и перемещение робота-манипулятора на него для начала процесса возведения конструкции.
Целесообразно, чтобы автоматическое позиционирование робота-манипулятора на монтажном горизонте с привязкой к соответствующему листу проекта осуществлялось посредством алгоритмов технического зрения по данным сканирования пространства, полученных с использованием камер и/или датчиков, размещенных на фланце манипулятора.
Целесообразно, чтобы после автоматического позиционирования робота-манипулятора на монтажном горизонте роботом-манипулятором осуществлялось уточнение геометрических и пространственных характеристик конструкций монолитного каркаса и архивирование данных для последующего формирования исполнительной документации.
Целесообразно, чтобы уточнение геометрических и пространственных характеристик конструкций монолитного каркаса осуществлялось с применением технического зрения и трехмерного сканирования пространства.
Целесообразно, чтобы перед началом процесса возведения конструкции на монтажном горизонте осуществлялся автоматический расчет плана производства монтажных работ и его оптимизация.
Целесообразно, чтобы после каждого перемещения в расчетную точку и стабилизации робота-манипулятора на монтажном горизонте осуществлялось его автоматическое позиционирование с применением технического зрения.
Целесообразно, чтобы автоматическое позиционирование робота-манипулятора осуществлялось посредством алгоритмов технического зрения по данным сканирования пространства, полученных с использованием камер и/или датчиков, установленных на манипуляторе.
Целесообразно, чтобы перед началом процесса возведения конструкции на монтажном горизонте роботом-манипулятором проверялось наличие необходимых материалов в зоне действия робота-манипулятора, уточнялось расположение поддонов с соответствующим типом мелкоштучных изделий и их доборных элементов согласно кладочному плану и плану производства монтажных работ с применением технического зрения.
Целесообразно, чтобы перед началом процесса возведения конструкции на монтажном горизонте роботом-манипулятором осуществлялась самодиагностика.
Целесообразно, чтобы выбор способа и устройства захвата, переноса и укладки мелкоштучного элемента роботом-манипулятором выбирался в зависимости от типа мелкоштучного изделия.
Целесообразно, чтобы способ нанесения роботом-манипулятором на поверхность мелкоштучного элемента клеящего состава выбирался в зависимости от типа мелкоштучного изделия.
Целесообразно, чтобы после установки всех элементов конструкции производилось ее контрольное сканирование с использованием технического зрения и/или трехмерного сканирования, на основании результатов которого формировалась исполнительная документация.
Технический результат достигается также тем, что робот-манипулятор для возведения конструкций из мелкоштучных изделий включает мобильную платформу и установленный на ней манипулятор, снабженный устройствами обнаружения, измерения и позиционирования, размещенными на фланце и основании манипулятора, автоматически сменяемыми устройствами захвата, переноса и укладки для различных типов мелкоштучных изделий, устройством дозированной подачи и нанесения клеевого раствора на поверхность мелкоштучных изделий, соединенным с емкостью для временного хранения клеевого раствора, и выполнен с возможностью дистанционного управления.
Целесообразно, чтобы робот-манипулятор был снабжен устройством для коррекции положения установленного в конструкцию мелкоштучного элемента.
Целесообразно, чтобы мобильная платформа была снабжена устройствами стабилизации для разных типов поверхностей.
Целесообразно, чтобы робот-манипулятор был оснащен по меньшей мере одной камерой для технического зрения, размещенной на фланце манипулятора.
Целесообразно, чтобы робот-манипулятор был оснащен по меньшей мере одним лазерным и/или ультразвуковым и/или оптическим датчиком, установленным на фланце манипулятора.
Целесообразно, чтобы робот-манипулятор был оснащен по меньшей мере одним датчиком наклона, установленным на основании манипулятора.
Технический результат достигается также тем, что комплекс для возведения конструкций из мелкоштучных изделий включает робот-манипулятор, автоматическое устройство подготовки доборных элементов и программный комплекс обработки, хранения данных и дистанционного управления роботом-манипулятором.
Группа изобретений поясняется чертежами.
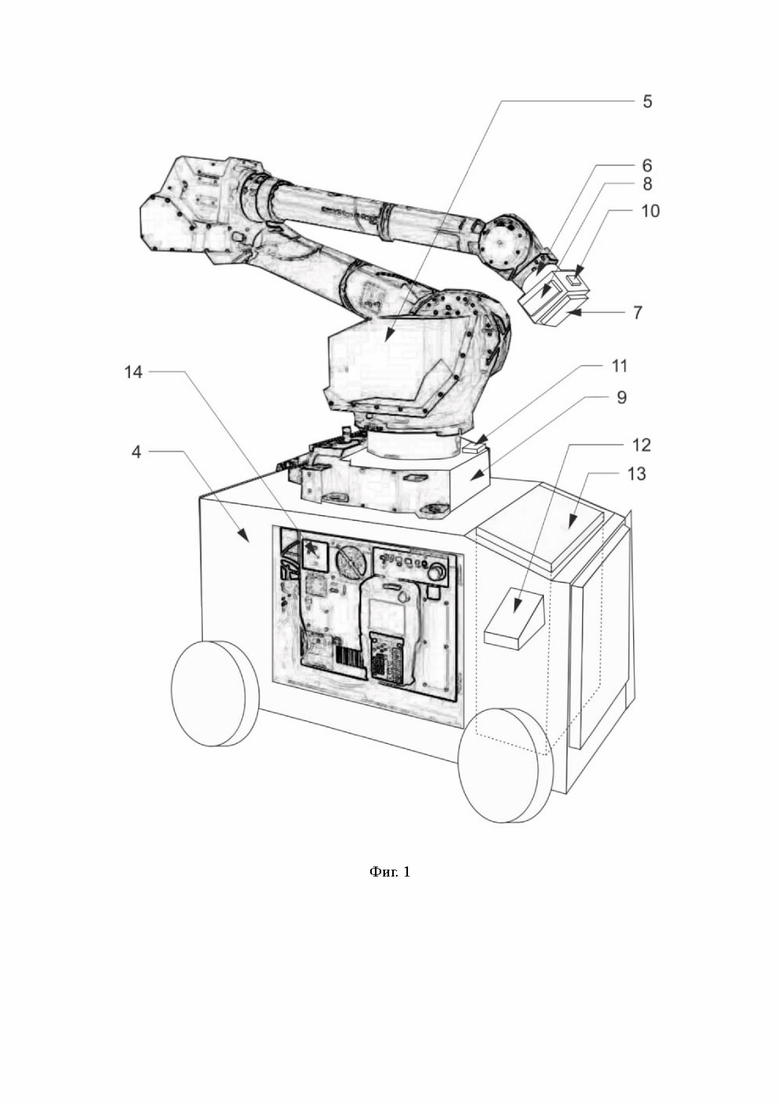
На Фиг. 1 представлен мобильный робот-манипулятор для возведения конструкций из мелкоштучных изделий.
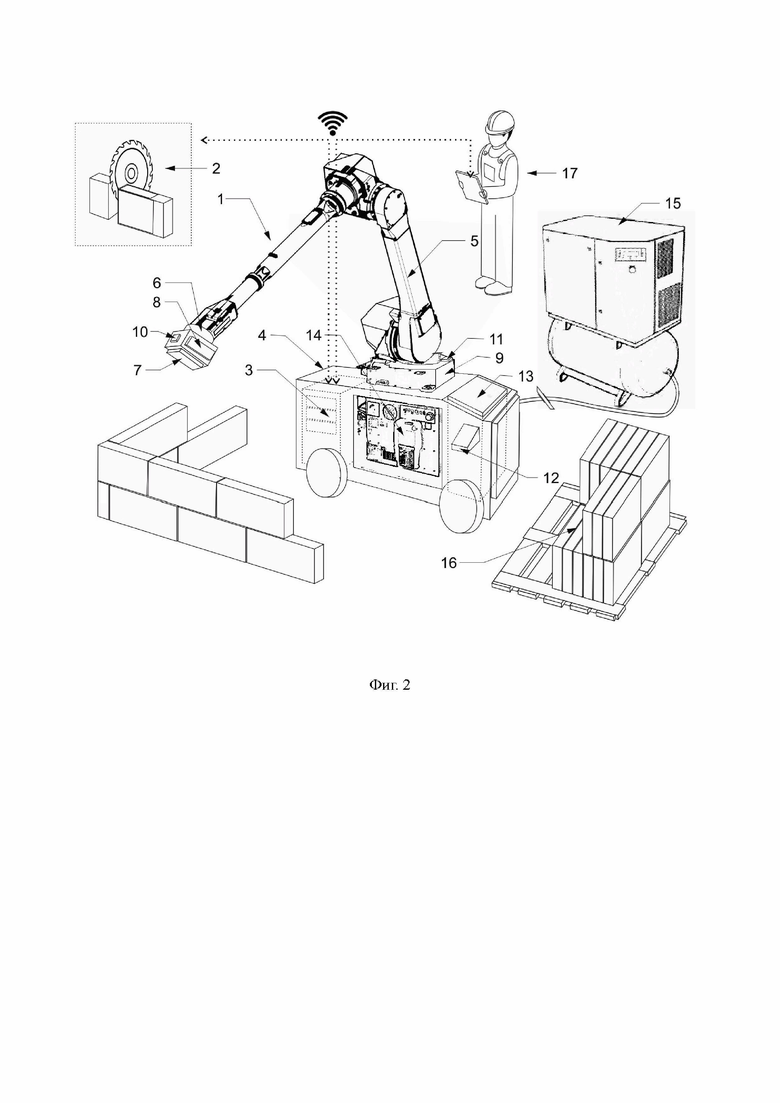
На Фиг. 2 представлен мобильный робот-манипулятор для возведения конструкций из мелкоштучных изделий на монтажном горизонте.
В данном описании под термином «мелкоштучные изделия» подразумеваются любого типа кирпичи, камни или блоки, применяемые в строительстве. Обычно это бетонные или глиняные кирпичи или блоки, из которых можно построить здание или подобное сооружение. Однако конкретный материал, из которого изготовлено мелкоштучное изделие, не является критическим для данной группы изобретений, и варианты осуществления группы изобретений могут применяться к кирпичам или блокам, изготовленным из других материалов, таких как огнеупорные материалы, пластмассы или дерево.
Термин «доборный элемент» используется для обозначения не целых мелкоштучных изделий, необходимых для завершения рядов кладки.
Термин «клеевой раствор» используется для обозначения любого соединения, смеси, химического вещества или затвердевающего материала, который используется или может быть использован для склеивания двух или более мелкоштучных изделий вместе.
Оператор является квалифицированным рабочим, осуществляющим управление комплексом для возведения конструкций из мелкоштучных изделий.
В предпочтительном варианте осуществления группы изобретений для реализации способа используют комплекс, включающий мобильный робот-манипулятор 1, автоматическое устройство подготовки доборных элементов 2 и программный комплекс 3, установленный на центральном сервере.
В предпочтительном варианте осуществления робот-манипулятор 1 включает мобильную платформу 4, способную перемещаться во всех направлениях, по различным поверхностям как внутри объекта, так и снаружи. Платформа 4 оснащена устройствами стабилизации для разных типов поверхностей. В качестве устройств стабилизации могут быть использованы выносные телескопические лапы.
На мобильной платформе 4 установлен 6-ти осевой манипулятор 5 с рукой манипулятора, на свободном конце которой предусмотрен фланец 6 манипулятора. На фланце 6 манипулятора расположены устройства захвата, переноса и укладки 7 мелкоштучных изделий, а также устройство коррекции положения мелкоштучных изделий 8 после их установки в конструкцию. Устройства для захвата, переноса и укладки 7 могут представлять собой пневматический (вакуумный) и пальцевый (электромеханический) захваты. В зависимости от типа мелкоштучных изделий (габаритов, веса), а также требований монтируемой конструкции может быть осуществлена автоматическая смена типа захвата 7 и устройства для коррекции положения 8.
Также на фланце 6 и основании 9 манипулятора размещены устройства обнаружения, измерения и позиционирования 10 и 11, данные от которых поступают в программный комплекс 3 для обработки и хранения. В предпочтительном варианте осуществления в качестве устройства обнаружения, измерения и позиционирования 10 используют лазерные датчики и камеры технического зрения. Также в качестве устройства для измерения и позиционирования используют датчик наклона 11, установленный на основании 9 манипулятора. Они позволяют осуществить автопозиционирование робота-манипулятора при каждом его перемещении, определять тип мелкоштучного изделия и его целостность, уточнять характеристики готовых конструкций, осуществлять мониторинг и регулировку процесса возведения конструкций. Также манипулятор может быть снабжен устройствами, работающими по принципу автоколлиматора, лазерными, ультразвуковыми, оптическими и другими датчиками для обнаружения, измерения и позиционирования.
На платформе 4 манипулятора размещено устройство для дозированной подачи и нанесения 12 клеевого раствора на поверхности мелкоштучных изделий, соединенное с бункером 13 для хранения клеевого раствора, установленным на мобильной платформе 4, и компрессором 15.
Робот-манипулятор оснащен контроллером 14, связанным по беспроводному или проводному каналу связи с центральным сервером системы, на котором установлен программный комплекс 3.
Программный комплекс 3 осуществляет обработку и хранение данных, включая все данные поступающие с камер и датчиков робота-манипулятора 1, геометрические характеристики и пространственные координаты всех объектов задействованных в строительстве (возведенных и возводимых конструкций и материалов), а также дистанционное управление роботом-манипулятором 1.
Автоматическое устройство подготовки доборных элементов 2 выполнено с числовым программным управлением и управляется через программный интерфейс программного комплекса 3.
В предпочтительном варианте возведение конструкций из мелкоштучных изделий с применением мобильного робота-манипулятора включает следующие технологические операции.
Осуществляется чтение файла проекта в формате AutoCAD/Revit посредством программного комплекса 3.
Выбирается монтажный горизонт (этаж) из представленного через программный интерфейс программного комплекса 3 списка монтажных горизонтов, с которых можно начать процесс возведения конструкций согласно проекту. На выбранный монтажный горизонт перемещается робот-манипулятор 1. Робот-манипулятор может свободно перемещаться под перекрытиями.
После перемещения осуществляется автоматическое позиционирование робота-манипулятора 1 на монтажном горизонте с привязкой к соответствующему листу проекта посредством алгоритмов технического зрения по данным сканирования пространства, полученных с использованием по меньшей мере камер технического зрения 10, а также лазерных датчиков 10, установленных на фланце 6 манипулятора 5.
Далее осуществляется уточнение геометрических и пространственных характеристик конструкций монолитного каркаса и архивирование данных для последующей обработки программным комплексом 3. Результатом обработки данных становится исполнительная документация, отражающая размерные и пространственные характеристики конструкций. Кроме того, формируются документы, фиксирующие фактически выполненный объем строительных работ как в натуральном, так и в денежном выражении. Уточнение геометрических и пространственных характеристик конструкций монолитного каркаса осуществляется посредством трехмерного сканирования и фотографирования пространства с помощью камер технического зрения и лазерных датчиков 10, установленных на фланце 6 манипулятора 5.
Вместе с этим перед началом процесса возведения конструкции на монтажном горизонте программным комплексом 3 осуществляется автоматический расчет плана производства монтажных работ и его оптимизация. Программный комплекс 3 рассчитывает полный объём мелкоштучных изделий, геометрию и количество доборных элементов, клеевого раствора, анкеров, пр. Программный комплекс 3 рассчитывает оптимальную последовательность возведения конструкций в соответствии с проектом, маршрут перемещения робота-манипулятора 1 на монтажном горизонте, координаты для расположения поддонов с мелкоштучными изделиями и готовыми доборными элементами, учитывая маршрут перемещения робота-манипулятора 1 и его зону досягаемости.
После расчёта кладочных планов программный комплекс 3 подает команду подготовки доборных элементов на устройство подготовки доборных элементов 2. Устройство подготовки доборных элементов 2 в автоматическом режиме начинает подготовку доборных элементов и их складирование на поддоны в соответствии с планом производства монтажных работ. Изготовление доборных элементов производится преимущественно из ранее отбракованных роботом-манипулятором 1 мелкоштучных изделий.
Далее программный комплекс 3 выдает задание оператору 17 на доставку в соответствующие координаты на монтажном горизонте необходимых для работы робота-манипулятора 1 материалов, включая поддоны с целыми мелкоштучными изделиями и подготовленные поддоны с доборными элементами. Оператор 17 осуществляет доставку материалов в указанные места и отправляет команду для начала работы робота-манипулятора 1.
Программный комплекс 3 передает команду роботу-манипулятору 1 на перемещение в точку начала работ. Робот-манипулятор 1 перемещается в расчетную точку и стабилизируется с использованием предназначенных для этой цели исполнительных механизмов, входящих в его состав.
После перемещения и стабилизации роботом-манипулятором 1 производится точный замер уровня пола, потолка и всех возведённых конструкций с помощью технического зрения с использованием камер и датчиков 10. Программный комплекс 3 осуществляет оценку углов наклона робота-манипулятора 1 в двух осях по отношению к абсолютному горизонту с помощью установленного на нем двумерного датчика наклона 11. Производится автопозиционирование робота-манипулятора 1.
Робот-манипулятор 1 проверяет наличие необходимых материалов в зоне его действия, уточняет расположение поддонов 16 с соответствующим типом мелкоштучных изделий и их доборных элементов согласно кладочному плану и плану производства монтажных работ.
Программный комплекс 3 осуществляет проверку работоспособности всех элементов робота-манипулятора 1, в том числе давление в пневматической системе, готовность устройств подачи клеевого раствора, наличие клеевого раствора в устройстве для дозированной подачи и нанесения 12 клеевого раствора, а также температуру окружающей среды.
Программный комплекс 3 выдаёт инструкции роботу-манипулятору 1 для выкладки конструкции в соответствии с уточнённым проектом и СниПами.
Робот-манипулятор 1 производит захват каждого элемента конструкции с поддона 16 с определенным типом мелкоштучных изделий после уточнения его расположения в результате трехмерного сканирования с помощью технического зрения, получения его пространственных координат и команды для захвата от программного комплекса 3. В отличии от известных аналогов в предложенном решении отсутствует подача мелкоштучных изделий, робот-манипулятор 1 адаптируется под выкладку на поддоне. Для захвата мелкоштучного изделия используются пневматический (вакуумный) или пальцевый (электромеханический) захват 7, размещаемый на фланце 6 манипулятора 5. Может быть произведена автоматическая смена типа захвата в зависимости от типа мелкоштучного изделия и требований монтируемой конструкции.
После захвата роботом-манипулятором 1 мелкоштучного изделия осуществляется автоматическая оценка качества и целостности захваченного изделия на предмет наличия сколов и повреждений с помощью технического зрения и/или искусственных нейронных сетей.
Если повреждения мелкоштучного изделия превышают допустимые отклонения, то изделие складируется на отдельный поддон. Информация о повреждении сохраняется в базе данных программного комплекса 3. Отбракованные изделия отправляются в дальнейшем на обработку к устройство подготовки доборных элементов 2 и используются при последующей подготовке доборных элементов, минимизируя количество неиспользованных остатков.
Если изделие соответствует требованиям качества, робот-манипулятор 1 подводит к соплу устройства для дозированной подачи и нанесения 12 клеевого раствора, включает подачу клеевого раствора и производит его нанесение на одну или несколько поверхностей монтируемого мелкоштучного элемента в соответствии с технологическими требованиями. В зависимости от типа мелкоштучных изделий выбирается способ нанесения клеящего раствора на нужные грани элемента – либо струйное нанесение с перемещением грани элемента по синусоидальной траектории под соплом устройства для дозированной подачи и нанесения 12, либо сплошное нанесение толстого слоя с последующим выравниванием. Клеящий раствор предварительно готовится в соответствии с инструкциями производителя сухой смеси в бункере 13 для хранения клеевого раствора.
После нанесения клеевого раствора робот-манипулятор 1 устанавливает монтируемый мелкоштучный элемент на расчётное место в возводимой конструкции.
После выкладки каждого элемента производятся замеры с целью подтверждения точности его позиционирования в соответствии с абсолютным горизонтом и вертикальной плоскостью возводимой конструкции. Замеры осуществляются с использованием технического зрения 10 и обрабатываются программным комплексом 3. Если отклонение положения элемента выходит за границы допуска, то программный комплекс 3 подаёт команду на выравнивание элемента одним из способов: с помощью давления на соответствующую грань элемента или с использованием устройства для коррекции положения 8 установленного в конструкцию элемента, установленного на фланце 6. Коррекция положения элемента осуществляется до тех пор, пока монтируемый элемент не будет установлен в границах допуска.
После того, как элемент был установлен в возводимой конструкции с требуемой точностью, программный комплекс 3 записывает в базу данных его пространственные координаты и уточняет степень готовности возводимой конструкции в проекте.
После установки всех элементов конструкции производится ее контрольное сканирование с использованием технического зрения, на основании результатов которого формируется исполнительная документация.
Возведение роботом-манипулятором 1 конструкции из мелкоштучных изделий осуществляется путем необходимого количества повторений вышеописанных операций.
Предложенные решения могут использоваться для работы в труднодоступных и неблагоприятных для присутствия человека местах в дистанционном режиме, позволяют расширить архитектурно-планировочные возможности, повысить уровень автоматизации при возведении зданий и сооружений с обеспечением при этом технологии строительства и требуемых технических характеристик зданий и сооружений. Данные решения обеспечивают возможность их эффективного применения в многоэтажном и высотном строительстве, что способствует повышению производительности в многоэтажном и высотном строительстве и улучшению качества готовых конструкций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс укладки газобетона | 2022 |
|
RU2803337C1 |
| Способ автоматизированной огнеупорной футеровки печей и роботизированный комплекс для его осуществления | 2018 |
|
RU2700435C2 |
| Способ автоматизированного возведения сооружений | 2021 |
|
RU2761783C1 |
| Навесное устройство к грузоподъемной машине | 1987 |
|
SU1527140A1 |
| Выносные подмости для возведения стен из мелкоштучного материала | 1990 |
|
SU1794162A3 |
| Манипулятор и футеровочный блок для выполнения торкретирования промышленного оборудования | 2023 |
|
RU2818700C1 |
| ВКЛАДЫШИ ДЛЯ КЛАДОЧНОГО РАСТВОРА, СПОСОБ ВОЗВЕДЕНИЯ СТЕНОВОЙ КЛАДКИ (ВАРИАНТЫ) С ПРИМЕНЕНИЕМ ЭТИХ ВКЛАДЫШЕЙ И КЛАДОЧНЫЙ РАСТВОР ДЛЯ ВОЗВЕДЕНИЯ СТЕНОВОЙ КЛАДКИ (ВАРИАНТЫ) | 2014 |
|
RU2562638C1 |
| Устройство для кирпичной кладки стен зданий | 1981 |
|
SU1010236A1 |
| Устройство для кладки кирпичных стен | 1987 |
|
SU1490240A1 |
| СПОСОБ КЛАДКИ КИРПИЧА | 2023 |
|
RU2818752C1 |
Группа изобретений относится к области строительства и может быть использована при возведении строительных и иных конструкций, в том числе малоэтажных и многоэтажных зданий и сооружений различного назначения, изготовлении частей конструкций простой и сложной геометрической формы. Техническим результатом предложенной группы изобретений является повышение производительности при возведении конструкций из мелкоштучных изделий при одновременном повышении качества возводимых конструкций и обеспечении повторяемости качества кладки из мелкоштучных изделий, сокращении применения ручного труда и оптимизации технологических процессов. Технический результат достигается тем, что способ возведения конструкций из мелкоштучных изделий с применением мобильного робота-манипулятора включает в себя выполнение технологических операций: чтение файла проекта; автоматическое позиционирование робота-манипулятора на монтажном горизонте с привязкой к соответствующему листу проекта с применением технического зрения; распознавание и выбор роботом-манипулятором с применением технического зрения типа мелкоштучных изделий согласно проекту из имеющихся в зоне действия робота-манипулятора; захват роботом-манипулятором мелкоштучного элемента с места складирования, расположенного в зоне действия робота-манипулятора; проверка роботом-манипулятором целостности захваченного мелкоштучного элемента с применением технического зрения; нанесение роботом-манипулятором на поверхность мелкоштучного элемента клеящего состава; установка роботом-манипулятором элемента в конструкцию в соответствии с проектом; возведение роботом-манипулятором конструкции из мелкоштучных изделий путем необходимого количества повторений по меньшей мере части вышеописанных операций, а также технический результат достигается роботом-манипулятором для осуществления данного способа и комплексом для осуществления данного способа. 3 н. и 16 з.п. ф-лы, 2 ил.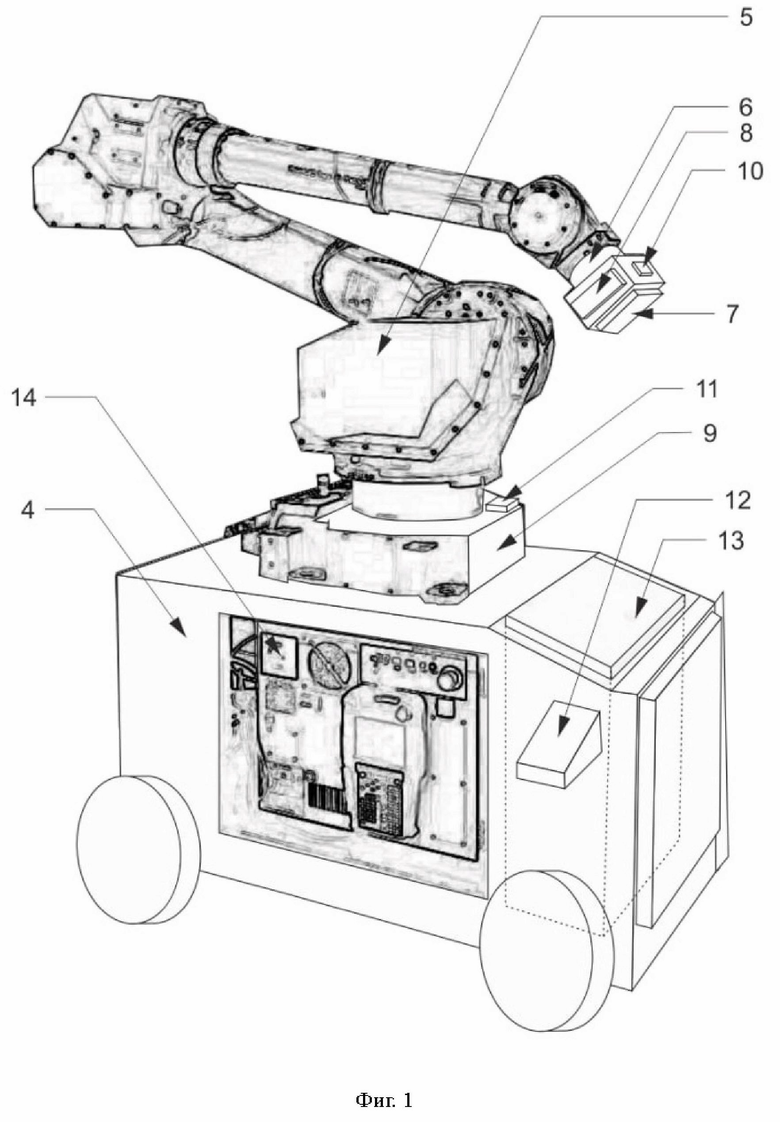
1. Способ возведения конструкций из мелкоштучных изделий с применением мобильного робота-манипулятора, включающий в себя выполнение технологических операций: чтение файла проекта; автоматическое позиционирование робота-манипулятора на монтажном горизонте с привязкой к соответствующему листу проекта с применением технического зрения; распознавание и выбор роботом-манипулятором с применением технического зрения типа мелкоштучных изделий согласно проекту из имеющихся в зоне действия робота-манипулятора; захват роботом-манипулятором мелкоштучного элемента с места складирования, расположенного в зоне действия робота-манипулятора; проверка роботом-манипулятором целостности захваченного мелкоштучного элемента с применением технического зрения; нанесение роботом-манипулятором на поверхность мелкоштучного элемента клеящего состава; установка роботом-манипулятором элемента в конструкцию в соответствии с проектом; возведение роботом-манипулятором конструкции из мелкоштучных изделий путем необходимого количества повторений по меньшей мере части вышеописанных операций.
2. Способ по п.1, характеризующийся тем, что после чтения файла проекта осуществляется выбор монтажного горизонта по проекту и перемещение робота-манипулятора на него для начала процесса возведения конструкции.
3. Способ по любому из пп.1, 2, характеризующийся тем, что автоматическое позиционирование робота-манипулятора на монтажном горизонте с привязкой к соответствующему листу проекта осуществляется посредством алгоритмов технического зрения по данным сканирования пространства, полученным с использованием камер и/или датчиков, размещенных на фланце манипулятора.
4. Способ по любому из пп.1-3, характеризующийся тем, что после автоматического позиционирования робота-манипулятора на монтажном горизонте роботом-манипулятором осуществляется уточнение геометрических и пространственных характеристик конструкций монолитного каркаса и архивирование данных для последующего формирования исполнительной документации.
5. Способ по п.4, характеризующийся тем, что уточнение геометрических и пространственных характеристик конструкций монолитного каркаса осуществляется с применением технического зрения и трехмерного сканирования.
6. Способ по любому из пп.1-5, характеризующийся тем, что перед началом процесса возведения конструкции на монтажном горизонте осуществляется автоматический расчет плана производства монтажных работ и его оптимизация.
7. Способ по любому из пп.1-6, характеризующийся тем, что после каждого перемещения в расчетную точку и стабилизации робота-манипулятора на монтажном горизонте осуществляется его автоматическое позиционирование с применением технического зрения.
8. Способ по п.7, характеризующийся тем, что автоматическое позиционирование робота-манипулятора осуществляется посредством алгоритмов технического зрения по данным сканирования пространства, полученным с использованием камер и/или датчиков, установленных на манипуляторе.
9. Способ по любому из пп.1-8, характеризующийся тем, что перед началом процесса возведения конструкции на монтажном горизонте роботом-манипулятором проверяется наличие необходимых материалов в зоне действия робота-манипулятора, уточняется расположение поддонов с соответствующим типом мелкоштучных изделий и их доборных элементов согласно кладочному плану и плану производства монтажных работ с применением технического зрения.
10. Способ по любому из пп.1-9, характеризующийся тем, что перед началом процесса возведения конструкции на монтажном горизонте роботом-манипулятором осуществляется самодиагностика.
11. Способ по любому из пп.1-10, характеризующийся тем, что способ нанесения роботом-манипулятором на поверхность мелкоштучного элемента клеящего состава выбирается в зависимости от типа мелкоштучного изделия.
12. Способ по любому из пп.1-11, характеризующийся тем, что после установки всех элементов конструкции производится ее контрольное сканирование с использованием технического зрения и/или трехмерного сканирования, на основании результатов которого формируется исполнительная документация.
13. Робот-манипулятор для осуществления способа по любому из пп.1-12, включающий
мобильную платформу и установленный на ней манипулятор, снабженный устройствами обнаружения, измерения и позиционирования, размещенными на фланце и основании манипулятора, автоматически сменяемыми устройствами захвата, переноса и укладки для различных типов мелкоштучных изделий, устройством дозированной подачи и нанесения клеевого раствора на поверхности мелкоштучных изделий, соединенным с емкостью для временного хранения клеевого раствора, и выполненный с возможностью дистанционного управления.
14. Робот-манипулятор по п.13, характеризующийся тем, что снабжен устройством для коррекции положения установленного в конструкцию элемента.
15. Робот-манипулятор по любому из пп.13-14, характеризующийся тем, что мобильная платформа снабжена устройствами стабилизации для разных типов поверхностей.
16. Робот-манипулятор по любому из пп.13-15, характеризующийся тем, что оснащен по меньшей мере одной камерой для технического зрения, размещенной на фланце манипулятора.
17. Робот-манипулятор по любому из пп.13-16, характеризующийся тем, что оснащен по меньшей мере одним лазерным и/или ультразвуковым и/или оптическим датчиком, установленным на фланце манипулятора.
18. Робот-манипулятор по любому из пп.13-17, характеризующийся тем, что оснащен по меньшей мере одним датчиком наклона, установленным на основании манипулятора.
19. Комплекс для осуществления способа по любому из пп.1-12, включающий робот-манипулятор по любому из пп.13-18, автоматическое устройство подготовки доборных элементов и программный комплекс обработки, хранения данных и дистанционного управления роботом-манипулятором по любому из пп.13-18.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ УКЛАДКИ КИРПИЧА | 2020 |
|
RU2740508C1 |
| УСТАНОВКА ДЛЯ КЛАДКИ СТЕН ИЗ КИРПИЧА | 1991 |
|
RU2047714C1 |
| Машина для кладки кирпича | 1974 |
|
SU962551A1 |
| Установка для кладки кирпичных стен | 1988 |
|
SU1631151A1 |
| DE 19540224 A1, 24.04.1997. | |||

