ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству управления для роторной электрической машины, которое может определять положение ротора роторной электрической машины, не используя датчик положения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Для точного управления роторной электрической машиной, имеющей ротор, снабженный постоянным магнитом, например, синхронным электрическим двигателем или индукционным синхронным электрическим двигателем, необходима информация о положения ротора роторной электрической машины, и информация о токе, текущем в роторной электрической машине. Обычно, информация о положении ротора получается посредством прикрепления датчика положения, или чего-либо подобного, на роторной электрической машине, но для снижения стоимости, экономии пространства, и для повышения надежности, при получении информации о положении ротора используется бездатчиковый способ определения положения.
[0003] Примерами такого бездатчикового способа контроля положения для роторной электрической машины являются бездатчиковый способ контроля положения с использованием индуцированного напряжения роторной электрической машины, как показано в Патентном документе 1, и бездатчиковый способ контроля положения с использованием выступов, как показано в Патентном документе 2. При бездатчиковом контроле положения с использованием индуцированного напряжения, когда скорость нулевая, индуцированное напряжение также нулевое, и поэтому положение ротора не может быть оценено должным образом. Кроме того, при бездатчиковом контроле положения с использованием выступов, поскольку выступы, используемые для оценки положения ротора, изменяют в два раза частоту ротора, то частота для оцениваемого положения также оказывается в два раза больше, чем частота ротора. То есть, оцениваемое положение принимает то же самое значение в пределах от 0 до 180 градусов и в пределах 180-360 градусов положения ротора для роторной электрической машины и, поэтому, этот способ оказывается не удовлетворительным для надежного детектирования положения ротора.
[0004] В связи с вышесказанным, по меньшей мере, когда роторная электрическая машина стартует со скорости, близкой к нулю, помимо бездатчикового способа контроля положения с использованием выступов, требуется другой способ для оценки информации о положении ротора для роторной электрической машины. Так, например, известен способ с использованием магнитного насыщения в роторной электрической машине, как показано в Патентном документе 3.
В этом способе, 2n (n - число фаз и является натуральным числом, равным или большим 3) векторов напряжения, имеющих ту же самую амплитуду, и имеющих фазы, разделенные на равные интервалы, подаются на роторную электрическую машину, и затем положение ротора детектируется по суммированному значению тока, получаемому суммированием детектированных значений токов, текущих при подаче пары таких векторов напряжения, имеющих фазы, отличающиеся на 180 градусов друг от друга. Этот способ требует предварительного условия, заключающегося в том, чтобы роторная электрическая машина находилась в состоянии магнитного насыщения посредством подачи векторов напряжения.
[0005] Например, Патентный документ 4 раскрывает способ регулирования для обеспечения состояния магнитного насыщения. В этом способе, значение импульса напряжения постепенно увеличивается так, чтобы дифференциальный ток ΔIb между максимальным значением Imax тока значения H-уровня, когда подается импульс напряжения, и значением тока H-уровня, соответствующим импульсу напряжения, имеющего фазу, отличающуюся на 180 градусов от Imax, становился равным или большим, чем заданное значение, таким образом, автоматически регулируя значение импульса напряжения.
СПИСОК ЦИТИРУЕМЫХ ПАТЕНТНЫХ ДОКУМЕНТОВ
[0006] Патентный документ 1: Международная Патентная Публикация No.W02002/091558
Патентный документ 2: Международная Патентная Публикация No.W02009/040965
Патентный документ 3: Японский Патент No.4271397
Патентный документ 4: Японская выложенная Патентная Публикация No.2008-054430
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0007] В случае использования способа детектирования положения ротора из Патентного документа 3, как описано выше, необходимо подавать достаточно большой ток для магнитного насыщения роторной электрической машины. Это справедливо для использования следующего принципа. А именно, когда магнитное насыщение не возникает, то ток, текущий при подаче вектора напряжения, имеющий фазу близкую к положению ротора, равен току, текущему при подаче вектора напряжения, имеющего фазу, отличающуюся на 180 градусов от фазы, близкой к положению ротора, но с другой стороны, когда возникает магнитное насыщение, первый ток становится большим, чем последний и, поэтому, положение ротора может быть детектировано по дифференциальному току между ними.
[0008] Поэтому, необходимо регулировать время подачи, в течение которого команда вектора напряжения подается на роторную электрическую машину, тем самым, регулируя ток, текущий в роторной электрической машине. Однако, магнитное насыщение роторной электрической машины различается в зависимости от типа, мощности, или чего-либо подобного для роторной электрической машины. Поэтому, чтобы использовать способ Патентного документа 3, каждая роторная электрическая машина должна быть заранее отрегулирована человеком, что оказывается не удобным. Ясно, что может возникнуть ситуация, когда подается очень большой ток, чтобы достичь более чем достаточного магнитного насыщения, но это не является хорошим способом, поскольку излишне возрастают потери.
[0009] Как одно из решений для вышеупомянутой проблемы, вышеупомянутый Патентный документ 4 допускает автоматическую регулировку. Однако, поскольку оценка выполняется только с использованием дифференциального тока, состояния магнитного насыщения роторной электрической машины не всегда оказывается возможным достичь в достаточной степени.
То есть, в случае использования значения тока для детектирования степени магнитного насыщения, как в Патентном документе 4, оказывается затруднительным различить, увеличивается ли значение дифференциального тока в роторной электрической машине вследствие магнитного насыщения, или значение дифференциального тока увеличивается вследствие команды увеличения абсолютной величины вектора напряжения или времени подачи. Поэтому, в случае, когда детектирование положения ротора выполняется с использованием значения импульса напряжения, автоматически регулируемого этим способом, имеется вероятность того, что точность детектируемого положения ротора может ухудшиться, или что может протекать слишком большой ток, поскольку для детектирования положения ротора был применен импульс напряжения, больший, чем это необходимо.
[0010] Настоящее изобретение было реализовано для решения описанных выше традиционных проблем, и задача настоящего изобретения заключается в получении устройства управления для роторной электрической машины, которое позволяет осуществить более корректную оценку степени магнитного насыщения, и позволяет осуществить простое и надежное детектирование минимально необходимого значения времени подачи, которое позволяет оценить положение ротора.
[0011] Устройство управления для роторной электрической машины в соответствии с настоящим изобретением представляет собой устройство управления для роторной электрической машины, которое управляет роторной электрической машиной, имеющей обмотки для n фаз (n - натуральное число, равное или большее, чем 3). Устройство управления включает в себя блок подачи напряжения для подачи вектора напряжения, на основании команды вектора напряжения, на роторную электрическую машину; блок детектирования тока для детектирования тока, текущего в обмотке для каждой фазы роторной электрической машины; блок вычисления команды вектора напряжения для вычисления, в качестве команды вектора напряжения, команд 2n векторов напряжения, имеющих ту же самую амплитуду, фазы, разделенные на равные интервалы в один период (360 градусов), и то же самое время подачи, и вывода команды 2n векторов напряжения на блок подачи напряжения; блок хранения для сохранения, в качестве сохраняемых значений тока, 2n×n токов, детектированных для соответствующих фаз блоком детектирования токов, при подаче 2n векторов напряжения, при том же самом указанном условии; блок оценки положения для оценки положения ротора роторной электрической машины в состоянии останова на основании сохраняемых значений тока из блока хранения; и блок регулирования для регулирования времени подачи до минимально необходимого времени Та подачи, которое позволяет роторной электрической машине войти в состояние магнитного насыщения, когда векторы напряжения поданы, так, чтобы обеспечить возможность оценки положения ротора. Блок регулирования вычисляет значение оценки регулирования на основании отношения между значением амплитуды напряжения команд вектора напряжения и сохраненных значений тока из блока детектирования тока в случае, когда вектор напряжения, на основании команды вектора напряжения, подается при времени подачи, установленном на произвольное время Tm подачи, и регулирует время подачи, на основании значения оценки регулирования.
[0012] Как описано выше, устройство управления для роторной электрической машины, в соответствии с настоящим изобретением, включает в себя блок регулирования, который вычисляет значение оценки регулирования, на основании отношения между значением амплитуды напряжения команд вектора напряжения и сохраненными значениями тока от блока детектирования тока, в случае, когда вектор напряжения, на основании команды вектора напряжения, подается при времени подачи, установленном на произвольное время Tm подачи, и регулирует время подачи, на основании значения оценки регулирования. Поэтому, устройство управления для роторной электрической машины обеспечивает более корректную оценку степени магнитного насыщения и обеспечивает простую и надежную установку минимально необходимого времени Та подачи команды вектора напряжения, которое позволяет осуществить детектирование положения ротора, посредством которого положение ротора может быть надежно и точно детектировано.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] [Фиг. 1] Фиг. 1 изображает структурную схему, показывающую конфигурацию устройства управления для роторной электрической машины, в соответствии с вариантом реализации 1 настоящего изобретения.
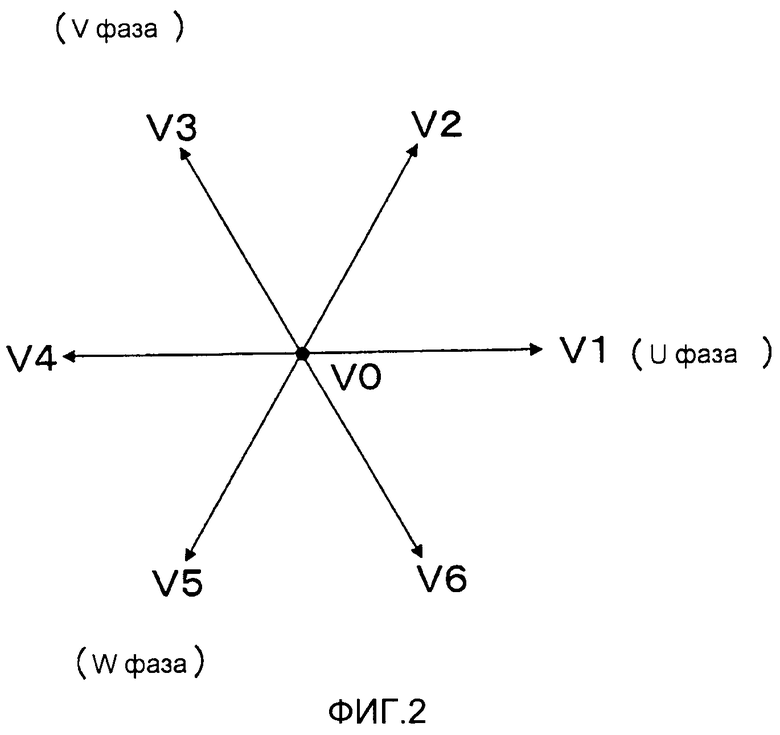
[Фиг. 2] Фиг. 2 изображает векторную диаграмму, показывающую векторы напряжения.
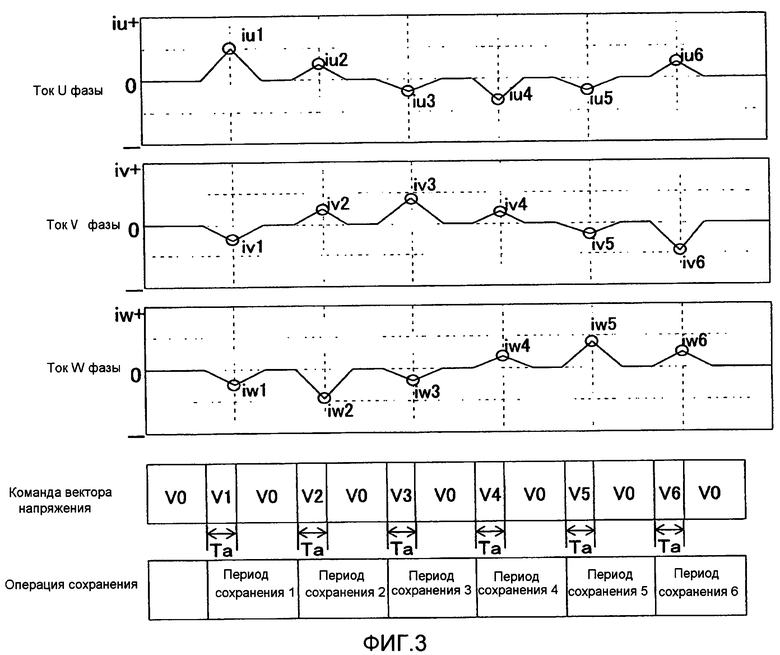
[Фиг. 3] Фиг. 3 изображает временную диаграмму, показывающую форму сигнала тока, текущего, когда подается каждый вектор напряжения, и сохраненные значения тока, сохраненные как максимальное значение в каждый период сохранения.
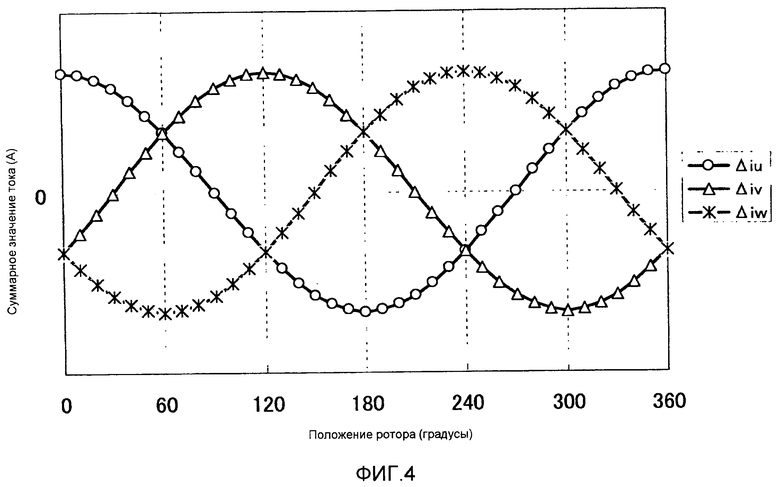
[Фиг. 4] Фиг. 4 изображает диаграмму, показывающую соотношение между суммарными значениями тока Δiu, Δiv и Δiw и положением ротора.
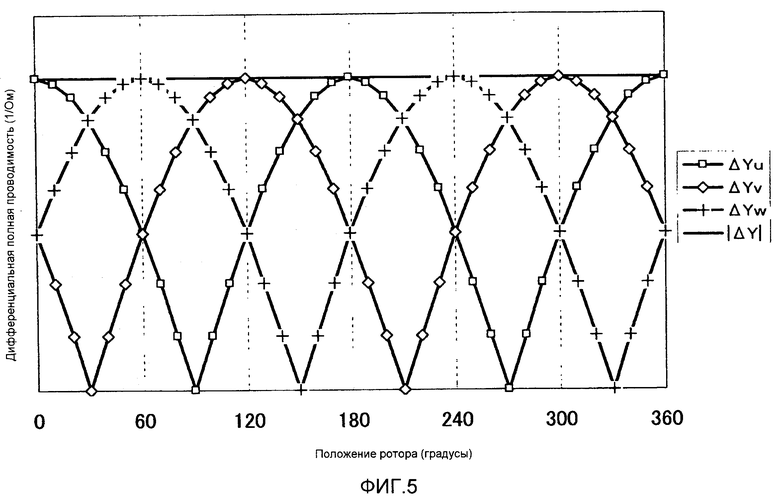
[Фиг. 5] Фиг. 5 изображает диаграмму, показывающую соотношение между дифференциальными полными проводимостями ΔYu, ΔYv, и ΔYw, |ΔY| и положением ротора.
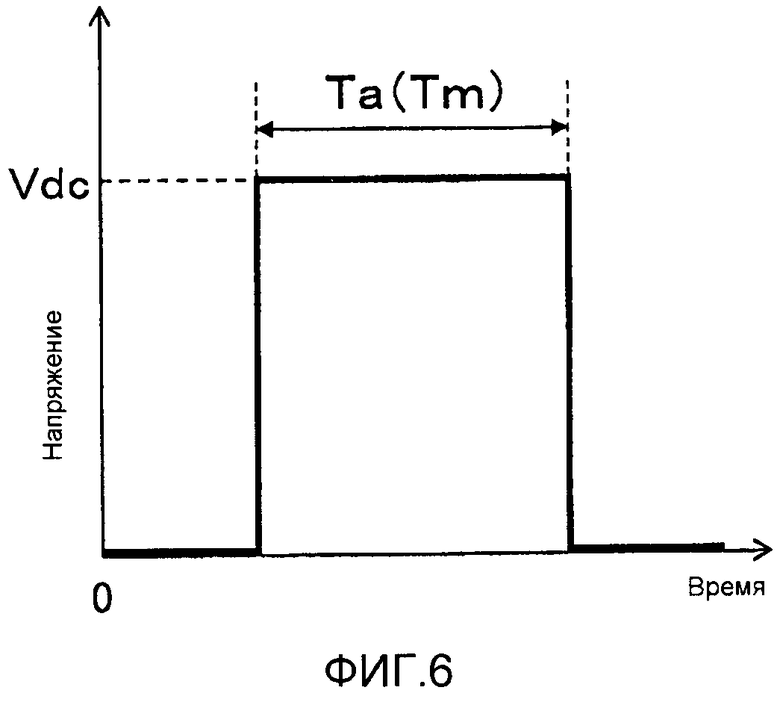
[Фиг. 6] Фиг. 6 изображает диаграмму, показывающую форму сигнала команды вектора напряжения.
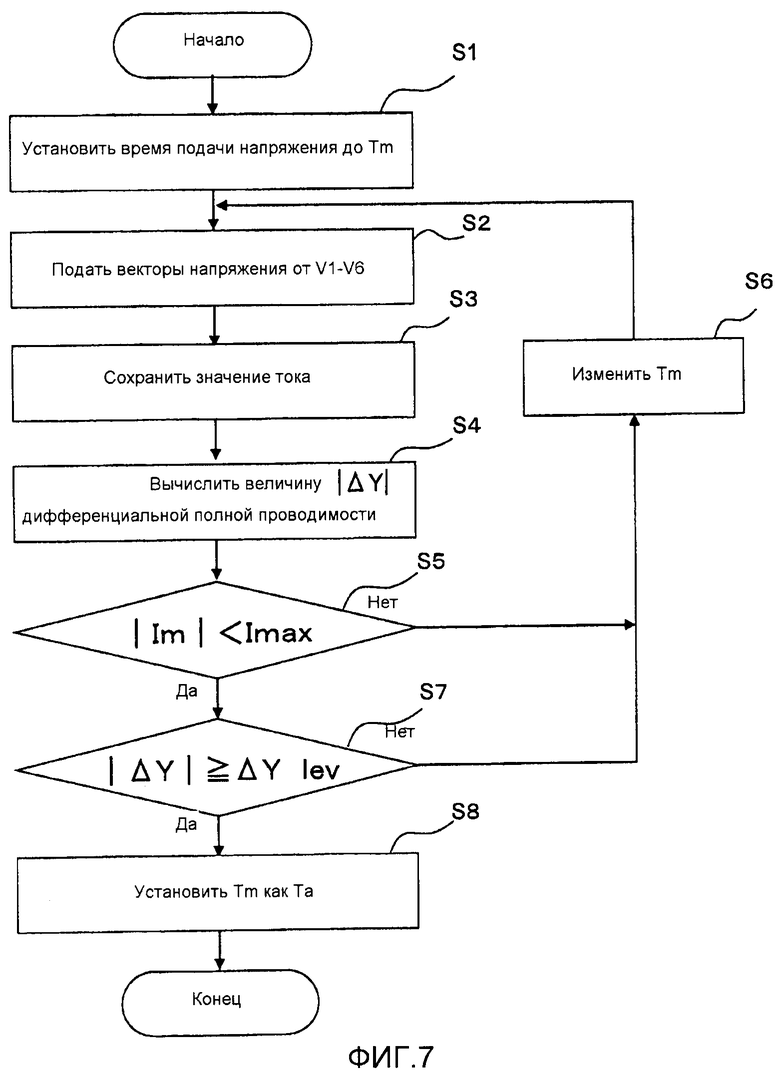
[Фиг. 7] Фиг. 7 изображает блок-схему последовательности операций, показывающую выполнение регулирования времени подачи команды вектора напряжения.
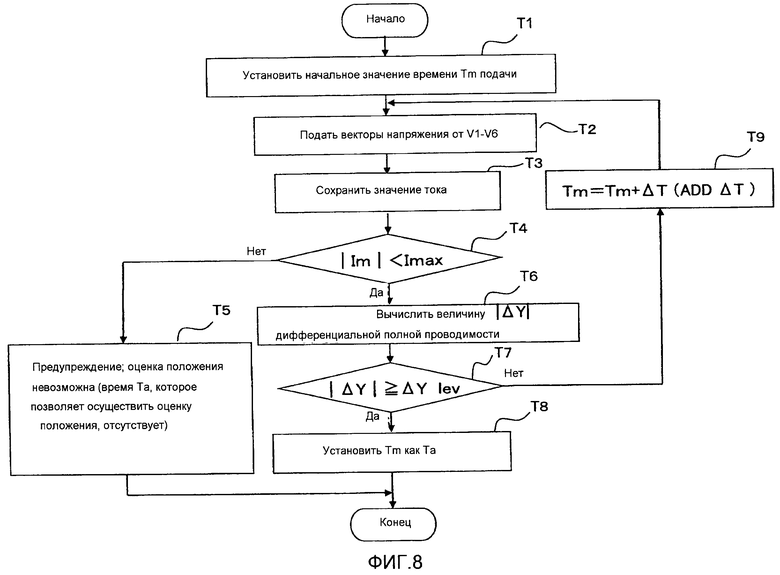
[Фиг. 8] Фиг. 8 изображает блок-схему последовательности операций, показывающую выполнение регулирования времени подачи команды вектора напряжения в устройстве управления для роторной электрической машины, в соответствии с вариантом реализации 2 настоящего изобретения.
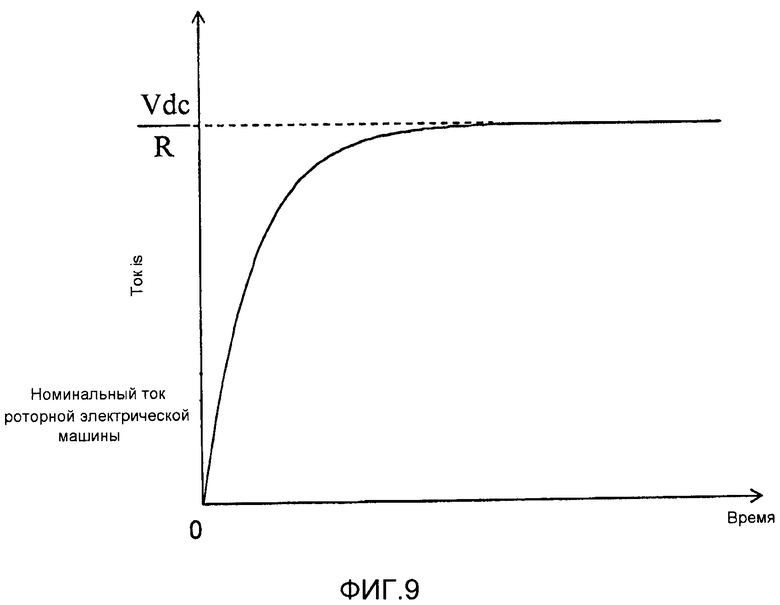
[Фиг. 9] Фиг. 9 изображает временную диаграмму, показывающую форму сигнала тока is(t), протекающего после того как на роторную электрическую машину подается ступенчатое напряжение с амплитудой Vdc, в описании устройства управления для роторной электрической машины, в соответствии с вариантом реализации 3 настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
[0014] ВАРИАНТ РЕАЛИЗАЦИИ 1
На Фиг. 1 показана схема конфигурации устройства управления для роторной электрической машины, в соответствии с вариантом реализации 1 настоящего изобретения. На Фиг. 1, роторная электрическая машина 1 имеет трехфазные обмотки для U фазы, V фазы, и W фазы и, в данном случае, представлена роторная электрическая машина с постоянным магнитом, в которой постоянный магнит предоставлен на роторе. Роторная электрическая машина 1 соединяется с блоком 3 подачи напряжения для подачи напряжения, например, с инвертором. Блок 3 подачи напряжения подает вектор напряжения, на основании введенной на него команды Vr вектора напряжения, на роторную электрическую машину 1. Блок 4 детектирования тока для детектирования тока обмотки, текущего в роторной электрической машине 1, подключен между блоком 3 подачи напряжения и роторной электрической машиной 1.
[0015] Блок 2 вычисления команды вектора напряжения последовательно подает команды вектора напряжения от V1 до V6, которые разделены на 60-ти градусные интервалы, как показано на Фиг. 2, с нулевой командой V0 вектора напряжения, вставляемой между ними, в следующем порядке - V0→V1→V0→V2→V0→V3→V0→V4→V0→V5→V0→V6→V0, как показано на Фиг. 3. Кроме того, команды V1-V6 равны друг другу по абсолютной величине и временам подачи, и подаются в течение времени Та подачи, установленном заранее.
[0016] Следует отметить, что блок 3 подачи напряжения выводит, на основании команды вектора напряжения, введенной из блока 2 вычисления команды вектора напряжения, вектор напряжения, имеющий ту же самую форму сигнала, что и таковая для команды вектора напряжения для роторной электрической машины 1. Поэтому, в нижеследующем описании, термины "команда вектора напряжения" и "вектор напряжения" используются синонимично как соответствующие друг другу, если только различие не указано специально.
[0017] Как показано посредством операции сохранения на Фиг. 3, блок 5 хранения сохраняет максимальное абсолютное значение каждого из трехфазных токов, детектируемых блоком 4 детектирования тока за периоды 1-6 сохранения, которые являются периодами, в течение которых блок 2 вычисления команды вектора напряжения выводит каждую из команд вектора напряжения от V1 до V6 и следующую команду V0 вектора напряжения, иначе говоря, периодами от начала подачи одной команды вектора напряжения (например, V1) до начала подачи следующей команды вектора напряжения (например, V2). Конкретно, как показано на Фиг. 3, за период 1 сохранения сохраняются максимальное значение iu1 абсолютного значения тока U-фазы, максимальное значение iv1 абсолютного значения тока V-фазы, и максимальное значение iw1 абсолютного значение тока W-фазы. Также за периоды сохранения 2-6, аналогично, сохраняются значения от iu2 до iu6, от iv2 до iv6, и от iw2 до iw6. В результате, в общей сложности 18 значений (соответствующих 2n×n=18 в случае фазового числа 15 n=3) сохраняются как сохраняемые значения тока.
[0018] Блок 6 оценки положения оценивает положение ротора роторной электрической машины 1 по 18-ти сохраненным значениям токов, выводимым из блока 5 хранения. С этой целью, время Та вывода (время подачи) команды вектора напряжения устанавливается как время, достаточное для магнитного насыщения статора роторной электрической машины 1, и вычисляется суммарное значение тока, когда соответствующие векторы напряжения подаются на роторную электрическую машину 1. Например, как показано в выражении (1), Δiu представляет собой суммарное значение тока, полученное суммированием: сохраненного значения iu1 тока U-фазы, имеющего ту же самую фазу, что и вектор V1 напряжения, когда подается вектор V1 напряжения; и сохраненного значения iu4 тока U-фазы, имеющего ту же самую фазу, что и вектор V4 напряжения, когда подается вектор V4 напряжения, имеющий фазу, отличную на 180 градусов от фазы вектора V1 напряжения. В это время, выполняется соотношение Δiu≠0 вследствие влияния магнитного насыщения. Следует отметить, что если статор роторной электрической машины 1 магнитно не насыщен, выполняется соотношение Δiu=0.
[0019] Δiu=iu1+iu4 (1)
[0020] Аналогично, когда Δiv представляет собой суммарное значение тока, полученное суммированием сохраненного значения iv3 тока V-фазы, полученного, когда подается вектор V3 напряжения, и сохраненного значения iv6 тока V-фазы, полученного, когда подается вектор V6 напряжения, имеющий фазу, отличную на 180 градусов от фазы вектора V3 напряжения, Δiv представляется нижеследующим выражением (2). Кроме того, когда Δiw представляет собой суммарное значение тока, полученное суммированием сохраненного значения iw5 тока W-фазы, полученного, когда подается вектор V5 напряжения, и сохраненного значения iw2 тока W-фазы, полученного, когда подается вектор V2 напряжения, имеющий фазу, отличную на 180 градусов от фазы вектора V5 напряжения, Δiw представляется нижеследующим выражением (3). Когда роторная электрическая машина 1 магнитно насыщена, выполняются соотношения Δiv≠0 и Δiw≠0.
[0021] Δiv=iv3+iv6 (2)
Δiw=iw5+iw2 (3)
[0022] На Фиг. 4 показаны вариации суммарных значений тока Δiu, Δiv, и Δiw относительно положения θ ротора роторной электрической машины 1. Суммированные значения тока Δiu, Δiv, и Δiw характерны тем, что их величины варьируются, в соответствии с положением θ ротора роторной электрической машины 1, с тем же самым периодом, что и положение θ ротора. Кроме того, разность фаз между суммарными значениями Δiu, Δiv, и Δiw тока составляет, для каждого, 120 градусов. Блок 6 оценки положения вычисляет положение θ ротора роторной электрической машины 1 при использовании суммарных значений Δiu, Δiv, и Δiw тока. Конкретный пример вычисления приводится ниже.
[0023] Как показано на Фиг. 4, из величин абсолютных значений суммарных значений Δiu, Δiv, и Δiw тока, положение ротора роторной электрической машины 1 может быть оценено с точностью до интервала в 60 градусов. Например, когда положение θ ротора составляет 0, Δiu принимает свое максимальное значение и, поэтому, суммарное значение тока, имеющее наибольшее абсолютное значение, составляет Δiu. Кроме того, когда положение θ ротора составляет 60 градусов, Δiw принимает свое минимальное значение и, поэтому, суммарное значение тока, имеющее наибольшее абсолютное значение, составляет Δiw. Таким образом, соотношение между абсолютными значениями суммарных значений Δiu, Δiv, и Δiw тока и положением θ ротора представляется нижеследующим выражением (4), где m - число интервалов, когда диапазон положений ротора делится на интервалы в 60 градусов. Таким образом, положение ротора может быть оценено с точностью до интервала в 60 градусов.
[0024] В данном случае, для точной оценки положения ротора, необходимо, чтобы условие выражения (4) могло быть точно определено, то есть, соотношения величин среди суммарных значений Δiu, Δiv и Δiw тока на Фиг. 4 могли быть точно определены. С этой целью, необходимо установить время Та подачи команды вектора напряжения так, чтобы статор роторной электрической машины 1 был достаточно магнитно насыщен.
[0025] Число интервалов m: Интервал MAX
1: -30~30 градусов: Δiu
2: 30~90градусов: -Δiw
3: 90~150градусов: Δiv
4: 150~210градусов: -Δiu
5:210~270градусов: Δiw
6: 270~330 градусов: -Δiv (4)
[0026] Кроме того, хотя здесь подробно и не описывается, оценка может быть выполнена с точностью до интервала в 30 градусов, или 15 градусов, при использовании способа, описанного в вышеупомянутом Патентном документе 3. Однако, в этом случае, так же как и сохраняемое значение тока, имеющее ту же самую фазу, что и для каждого вектора напряжения, необходимо значение тока, имеющее фазу, ортогональную к каждому вектору напряжения. Поэтому, все из общего количества 18-ти сохраняемых значений тока, описанных выше, используются для получения этих значений тока, имеющих ортогональные фазы.
[0027] Для точной оценки положения ротора блоком 6 оценки положения на основании сохраняемого значения тока, выводимого из блока 5 хранения, и команды вектора напряжения, выводимого из блока 2 вычисления команды вектора напряжения, блок 7 регулирования автоматически регулирует время Та подачи команды вектора напряжения, что позволяет в достаточной степени магнитно насытить статор роторной электрической машины 1, и не позволяет току, текущему в роторной электрической машине 1, стать слишком большим. Если время Та подачи команды вектора напряжения, которое позволяет в достаточной степени магнитно насытить статор роторной электрической машины 1 и не позволяет току, текущему в роторной электрической машине 1, стать слишком большим, регулируется человеком, выполнение регулирования требует длительного времени и бывает затруднительным. Поэтому, желательно, чтобы время Та подачи могло быть отрегулировано автоматически.
[0028] Соответственно, полагая, что оценка положения ротора выполняется на основании справедливости выражения (4), при использовании суммарных значений тока по выражениям от (1) до (3), обусловленных магнитным насыщением роторной электрической машины 1, как описано выше, степень магнитного насыщения роторной электрической машины 1 может быть детектирована для определения, действительно ли роторная электрическая машина 1 в достаточной степени магнитно насыщена и, тем самым, время подачи вектора напряжения, которое позволяет осуществить достаточное магнитное насыщение, может быть получено автоматически. В случае использования, например, значения тока, как в Патентном документе 4, для детектирования степени магнитного насыщения, оказывается затруднительным различить, увеличивается ли в роторной электрической машине 1 суммарное значение тока вследствие магнитного насыщения, или суммарное значение тока увеличивается вследствие увеличения величины команды вектора напряжения или времени подачи.
[0029] То есть, поскольку величина суммарного значения тока представляет собой функцию двух значений, то есть, степени магнитного насыщения роторной электрической машины 1 и команды вектора напряжения, оказывается затруднительным зарегистрировать только степень магнитного насыщения посредством использования только суммарного значения тока. В случае, когда время подачи вектора напряжения регулируется, используя только суммарное значение тока, имеется вероятность того, что время подачи вектора напряжения отрегулировано до значения, которое не позволяет в достаточной степени магнитно насытить роторную электрическую машину 1, или напротив, отрегулировано до значения, которое позволяет осуществить достаточное магнитное насыщение, но приводит к тому, что в роторной электрической машине 1 течет повышенный ток.
[0030] В результате, если оценка положения выполняется при использовании времени подачи вектора напряжения, регулируемого только посредством использования суммарного значения тока, может случиться ошибочная оценка положения, или снижение точности оценки, или в роторной электрической машине 1 может течь повышенный ток. Поэтому, блок 7 регулирования настоящего варианта реализации 1 детектирует степень магнитного насыщения с использованием и суммарного значения тока, и с использованием команды вектора напряжения, тем самым, решая вышеупомянутую проблему. Далее, описывается конкретный способ детектирования.
[0031] Вначале описывается способ детектирования степени магнитного насыщения. Суммарное значение тока Δiu в выражении (1) представляет собой значение, полученное суммированием сохраняемых значений iu1 и iu4 тока, сохраняемых в блоке 5 хранения, которые являются значениями токов, текущих, когда векторы V1 и V4 напряжения, имеющие фазы, отличные на 180 градусов друг от друга, подаются на роторную электрическую машину 1. Импеданс, или полная проводимость, роторной электрической машины 1 тот же самый между положениями, когда фазы различаются на 180 градусов друг от друга. Поэтому, iu1 и iu4 должны иметь различные знаки и одно и то же абсолютное значение, и Δiu должен быть равен 0. Однако, если наступает магнитное насыщение, iu1 и iu4 имеют различные абсолютные значения, и Δiu не равен 0.
[0032] То есть, можно полагать, что причина выполнения Δiu≠0 заключается в том, что при магнитном насыщении возникает различие в импедансе, или полной проводимости, между положениями, где фазы различаются на 180 градусов друг от друга в роторной электрической машине 1. Кроме того, можно полагать, что различие в импедансах, или полных проводимостях, возникает вследствие только магнитного насыщения. Поэтому, импедансы, или полные проводимости, вычисляются в положениях, где фазы различаются на 180 градусов друг от друга, и степень магнитного насыщения роторной электрической машины 1 может быть детектирована по различию между ними. Импеданс, или полная проводимость, связанный с суммарными значениями Δiu, Δiv, и Δiw тока в выражениях (1)-(3), используемых для оценки положения, вычисляется так, как показано ниже.
[0033] Хотя в настоящем варианте реализации 1, полная проводимость, связанная с суммарными значениями Δiu, Δiv, и Δiw тока вычисляется показанным ниже образом, нижеследующее может быть также применимо к случаю, когда вычисляется и используется именно импеданс, который является обратной величиной полной проводимости.
Как описано ниже, полная проводимость вычисляется как значение, полученное делением сохраняемого значения тока на значение амплитуды напряжения вектора напряжения. С другой стороны, импеданс представляет собой обратную величину полной и и вычисляется как значение, полученное делением значения амплитуды напряжения вектора напряжения на сохраняемое значение тока. Поэтому, полагая, что степень магнитного насыщения может быть зарегистрирована при использовании импеданса, или полной проводимости, можно сказать, что отношение между значением амплитуды напряжения вектора напряжения и сохраняемым значением тока может быть использовано как значение оценки регулирования и степень магнитного насыщения может быть оценена на основании этого значения оценки регулирования.
[0034] Суммарное значение Δiu тока для U фазы представляет собой значение, полученное суммированием сохраненных значений iu1 и iu4 тока, сохраняемых в блоке 5 хранения, которые являются значениями токов, имеющих те же самые фазы, что и векторы напряжения V1 и V4, соответственно, текущих, когда векторы V1 и V4 напряжения, имеющие фазы, различающиеся на 180 градусов друг от друга, подаются на роторную электрическую машину 1. Поэтому, полная проводимость в направлении вектора V1, когда подается команда V1 вектора напряжения, может быть вычислена из вектора V1 напряжения и сохраненного значения iu1 тока, как показано в выражении (5). Вычисленная полная проводимость обозначается как Yu1.
Кроме того, полная проводимость в направлении вектора V4, когда подается команда V4 вектора напряжения, может быть вычислена из вектора напряжения V4 и сохраненного значения iu4 тока, как показано в выражении (6). Вычисленная полная проводимость обозначается как Yu4.
[0035] 
 (5)
(5)
 (6)
(6)
[0036] Разность между полными проводимостями Yu1 и Yu4 может быть вычислена как величина разности между Yu1 и Yu4, как показано в выражении (7), например. Следует отметить, что величина разности между Yu1 и Yu4, полученная из выражения (7), обозначается как дифференциальная полная проводимость ΔYu U-фазы.
[0037] ΔYu=|Yu1-Yu4| (7)
[0038] Аналогично суммарное значение Δiv тока для V фазы представляет собой значение, полученное, суммированием сохраненных значений iv3 и iv6 тока, сохраненных в блоке 5 хранения, которые являются значениями токов, имеющих те же самые фазы, что и векторы V3 и V6 напряжения, соответственно, текущих, когда векторы V3 и V6 напряжения, имеющие фазы, различающиеся на 180 градусов друг от друга, подаются на роторную электрическую машину 1. Поэтому, полные проводимости Yv3 и Yv6, когда векторы V3 и V6 напряжения поданы, представлены выражениями (8) и (9) и, кроме того, дифференциальная полная проводимость ΔYv V-фазы может быть вычислена так, как показано в выражении (10).
[0039]  (8)
(8)
 (9)
(9)
ΔYv=|Yv3-Yv6| (10)
[0040] Аналогично, суммарное значение Δiw тока для W фазы представляет собой значение, полученное суммированием сохраненных значений iw5 и iw2 токов, сохраненных в блоке 5 хранения, которые являются значениями токов, имеющих те же самые фазы, что и векторы V5 и V2 напряжения, соответственно, текущих, когда векторы V5 и V2 напряжения, имеющие фазы, различающиеся на 180 градусов друг от друга, подаются на роторную электрическую машину 1. Поэтому, полные проводимости Yw5 и Yw2, когда векторы V5 и V2 напряжения поданы, представлены выражениями (11) и (12) и, кроме того, дифференциальная полная проводимость ΔYw W-фазы, может быть вычислена так, как показано в выражении (13).
[0041]  (11)
(11)
 (12)
(12)
ΔYw=|Yw5-Yw2| (13)
[0042] Поскольку величины суммарных значений Δiu, Δiv, и Δiw тока варьируются в соответствии с положением θ ротора роторной электрической машины 1, как показано на Фиг. 4, дифференциальные полные проводимости ΔYu, ΔYv, и ΔYw представляются так, как показано на Фиг. 5.
Затем, абсолютная величина |ΔY| вектора, составленного из дифференциальных полных проводимостей ΔYu, ΔYv, и ΔYw вычисляется выражением (14), посредством которого постоянное значение, не зависящее от положения θ ротора, может быть получено, как показано на Фиг. 5. Затем, величина |ΔY| дифференциальных полных проводимостей используются как значение оценки регулирования для оценки степени насыщения магнитного потока, посредством которого регулируется время Та подачи вектора напряжения.
[0043]  (14)
(14)
[0044] Следует отметить, что поскольку команды V1-V6 вектора напряжения, выводимые из блока 2 вычисления команды вектора напряжения, равны друг другу по их абсолютной величине и времени подачи, как описано выше, все абсолютные величины команд |V1|-|V6| вектора напряжения имеют то же самое значение. Поэтому, дифференциальные полные проводимости ΔYu, ΔYv, и ΔYw в выражениях (7), (10), и (13) могут быть вычислены при использовании суммарных значений Δiu, Δiv, и Δiw тока, как показано в выражениях (15)-(17), где |V| - абсолютная величина команды вектора напряжения.
[0045]  (15)
(15)
 (16)
(16)
 (17)
(17)
[0046] Кроме того, в случае, когда, как в инверторе напряжения, или в чем-то подобном, блок 3 подачи напряжения подает напряжение на роторную электрическую машину 1 посредством переключения напряжения шины постоянного тока, имеющего фиксированное значение, прикладываемое напряжение представляет собой импульсное напряжение, амплитуда которого представляет собой напряжение Vdc шины постоянного тока и время подачи которого представляет собой время Та подачи команды вектора напряжения, как показано на Фиг. 6. Поэтому, как показано в выражениях (18)-(20), дифференциальные полные проводимости ΔYu, ΔYv, и ΔYw могут быть вычислены посредством использования времени Та подачи команды вектора напряжения.
[0047]  (18)
(18)
 (19)
(19)
 (20)
(20)
[0048] Далее, в связи с блок-схемой последовательности операций, показанной на Фиг. 7, описывается способ автоматического регулирования времени Та подачи команды вектора напряжения, при использовании в качестве значения оценки регулирования абсолютной величины |ΔY| дифференциальных полных проводимостей ΔYu, ΔYv, и ΔYw, указывающей степень магнитного насыщения.
Вначале, время подачи команды вектора напряжения устанавливается как произвольное значение Tm (этап S1), и затем, подобно оценке положения ротора, команды V1-V6 вектора напряжения, которые разделены на интервалы в 60 градусов, как показано на Фиг. 2, выводятся последовательно, с нулевой командой V0 вектора напряжения, помещаемой между ними, в следующем порядке, V0→V1→V0→V2→V0→V3→V0→V4→V0→V5→V0→V6→V0, как показано на Фиг. 3 (этап S2).
[0049] Подобно оценке положения ротора, как показано на этапе сохранения на Фиг. 3, блок 5 хранения сохраняет максимальное абсолютное значение каждого из трехфазных токов, детектированных блоком 4 детектирования тока, в периоды сохранения 1-6, которые являются периодом, в течение которого блок 2 вычисления команды вектора напряжения выводит каждую из команд V1-V6 вектора напряжения и следующую команду V0 вектора напряжения (этап S3). Блок 7 регулирования вычисляет абсолютную величину |ΔY| дифференциальных полных проводимостей из этих сохраненных значений тока, сохраняемых в блоке 5 хранения, как показано в выражении (14) (этап S4).
[0050] Кроме того, в это время, блок 7 регулирования вычисляет величину |Im|, которая является наибольшей из абсолютных значений 18-ти сохраненных значений тока, сохраняемых в блоке 5 хранения, и определяет, действительно ли наибольшее значение |Im| тока меньше, чем заданное максимальное значение Imax тока (этап S5). Если наибольшее значение |Im| тока равно или больше, чем максимальное значение Imax тока (НЕТ на этапе S5), время Tm подачи команды вектора напряжения изменяется (уменьшается) (этап S6), и затем операция этапа S2 повторяется. Если наибольшее значение |Im| тока меньше, чем максимальное значение тока Imax (ДА на этапе S5), то определяется, действительно ли вычисленная абсолютная величина |ΔY| дифференциальных полных проводимостей равна или больше, чем пороговое значение ΔYlev дифференциальной полной проводимости, которое является заданным значением порога регулирования (этап S7).
[0051] Если абсолютная величина |ΔY| дифференциальных полных проводимостей равна или больше, чем пороговое значение ΔYlev дифференциальной полной проводимости (ДА на этапе S7), можно полагать, что статор роторной электрической машины 1 достаточно магнитно насыщен и, поэтому, время Tm подачи команды вектора напряжения в этот момент устанавливается как Та (этап S8). Иначе, (НЕТ на этапе S7), время Tm подачи команды вектора напряжения изменяется и, затем, подача вектора напряжения, вычисление абсолютной величины |ΔY| дифференциальных полных проводимостей, и сравнение с пороговым значением ΔYlev дифференциальной полной проводимости, повторяются.
[0052] Желательно, чтобы на этапе S1 начальное значение Tm времени подачи было установлено сравнительно малым, так, чтобы определение на этапе S7 в первой последовательности соответствовало бы состоянию НЕТ. Таким образом, необходимое минимальное установленное значение Та времени подачи, которое обеспечивает возможность оценки положения ротора, может быть получено почти наверняка.
[0053] Следует отметить, что заданное максимальное значение Imax тока может быть установлено как номинальное значение тока или максимальное значение тока роторной электрической машины 1, или номинальное значение тока или максимальное значение тока блока 3 подачи напряжения, например. Кроме того, желательно, чтобы заданное пороговое значение ΔYlev дифференциальной полной проводимости было установлено как величина дифференциальной полной проводимости, которая позволяет блоку 6 оценки положения оценить положение точно, и не позволить току, текущему в роторной электрической машине 1, стать слишком большим. Например, если происходит достаточное магнитное насыщение, когда суммарное значение тока составляет 10% значения номинального тока роторной электрической машины 1, дифференциальная полная проводимость, соответствующая случаю, когда суммарное значение тока составляет 10% номинального значения тока, может быть установлена как пороговое значение ΔYlev дифференциальной полной проводимости.
[0054] Как описано выше, в варианте реализации 1 настоящего изобретения, абсолютная величина |ΔY| дифференциальной полной проводимости вычисляется из сохраненных значений тока, полученных, когда команды V1-V6 вектора напряжения, каждая последовательно выводится за время Tm подачи, установленное как произвольное значение, при использовании выражения (14). Затем, вычисленная абсолютная величина |ΔY| дифференциальной полной проводимости сравнивается с заданным пороговым значением ΔYlev дифференциальной полной проводимости, и произвольное значение времени Tm подачи команды вектора напряжения, когда выполняется условие ||ΔY|≥ΔYlev, устанавливается как время Та подачи команды вектора напряжения. Таким образом, степень магнитного насыщения может быть оценена соответственно, и без участия человека, блок 6 оценки положения может оценить положение ротора точно, и время Та подачи команды вектора напряжения может быть автоматически отрегулировано до значения, которое не позволяет току, текущему в роторной электрической машине 1, стать слишком большим.
[0055] В вышеприведенном описании, блок 5 хранения сохраняет, в качестве сохраненного значения тока, максимальное значение тока для каждой фазы, детектируемое блоком 4 детектирования тока в каждом из периодов 1-6 сохранения, когда подается каждый вектор напряжения, при том же самом условии. Однако, взамен, когда каждый вектор напряжения подается при том же самом условии, ток для каждой фазы, детектируемый блоком 4 детектирования тока в конце периода каждой подачи может быть сохранен в качестве сохраненного значения тока. Также в этом случае, может быть получено почти то же самое сохраненное значение тока, что и в вышеупомянутом случае и, кроме того, поскольку достаточно того, что детектируемое значение извлечено и сохранено в отношении только временного отсчета, то имеется преимущество в том, что упрощается конфигурация блока хранения.
[0056] ВАРИАНТ РЕАЛИЗАЦИИ 2
В вышеупомянутом варианте реализации 1, для регулирования времени Та подачи команды вектора напряжения, время подачи команды вектора напряжения устанавливается как произвольное значение Tm, и значение Tm изменяется до соответствующего значения, посредством чего получается минимально необходимое установленное значение Та времени подачи, которое позволяет осуществить оценку положения ротора. С другой стороны, настоящий вариант реализации 2, посредством постепенного увеличения времени подачи команды вектора напряжения от значения близкого к нулю и до устанавливаемого значения, позволяет вычислить время Та подачи команды вектора напряжения при сокращении времени, необходимого для автоматического регулирования и делая ток, текущий в роторной электрической машине 1, насколько возможно малым.
[0057] Конфигурация настоящего варианта реализации 2 такая же, что и в варианте реализации 1, показанном на Фиг. 1, и, например, методика вычисления абсолютной величины дифференциальной полной проводимости - также, та же самая. Отличается только способ установки для времени Tm подачи команды вектора напряжения и последующая обработка. Поэтому, описание таких же методик, как и в варианте реализации 1, опущено.
[0058] На Фиг. 8 показана блок-схема последовательности операций для автоматического регулирования времени подачи команды вектора напряжения, в соответствии с настоящим вариантом реализации 2.
Вначале, устанавливается начальное значение времени Tm подачи команды вектора напряжения (этап Т1). Начальное значение устанавливается как малое значение, близкое к нулю. Затем, команды V1-V6 вектора напряжения, которые разделены на интервалы в 60 градусов, как показано на Фиг.2, последовательно выводятся, с нулевой командой V0 вектора напряжения, вставляемой между ними, в следующем порядке, V0→V1→V0→V2→V0→V3→V0→V4→V0→V5→V0→V6→V0, как показано на Фиг.3 (этап T2).
[0059] Как показано в операции сохранения на Фиг. 3, блок 5 хранения сохраняет максимальное значение абсолютного значения каждого из трехфазных токов, детектируемых блоком 4 детектирования токов, в периоды 1-6 сохранения, которые являются периодом, в течение которого блок 2 вычисления команды вектора напряжения выводит каждую из команд V1-V6 вектора напряжения, и последующую команду V0 вектора напряжения (этап T3). Блок 7 регулирования вычисляет величину |Im|, которая является наибольшей из абсолютных значений 18-ти сохраняемых значений тока, сохраняемых в блоке 5 хранения, и определяет, действительно ли наибольшее значение |Im| тока меньше, чем заданное максимальное значение Imax тока (этап T4).
[0060] В этот момент, если наибольшее значение |Im| тока равно или больше, чем максимальное значение тока Imax (НЕТ на этапе T4), то определяется, что нет такого времени подачи команды вектора напряжения, которое позволяет предпочтительно осуществить оценку положения со значением тока, меньшим, чем максимальное значение Imax тока, и выполняется операция предупреждения для указания того, что оценку положения выполнить невозможно (этап T5). Если наибольшее значение |Im| тока меньше, чем максимальное значение Imax тока (ДА на этапе T4), блок 7 регулирования вычисляет абсолютную величину |ΔY| дифференциальной полной проводимости по сохраненным значениям тока, сохраняемым в блоке 5 хранения, как показано в выражении (14) (этап T6).
[0061] Затем, определяется, действительно ли расчетная абсолютная величина |ΔY| дифференциальной полной проводимости равна или больше, чем заданное пороговое значение ΔYlev дифференциальной полной проводимости (этап T7). Если величина |ΔY| дифференциальной полной проводимости равна или больше, чем пороговое значение ΔYlev дифференциальной полной проводимости (ДА на этапе T7), полагается, что статор роторной электрической машины 1 достаточно магнитно насыщен и, поэтому, время Tm подачи команды вектора напряжения в этот момент устанавливается как Та (этап T8). Иначе (НЕТ на этапе T7), добавляется добавочное значение ΔТ времени подачи напряжения ко времени Tm подачи команды вектора напряжения для изменения времени Tm подачи команды вектора напряжения (этап T9), и затем подача вектора напряжения, вычисление величины |ΔY| дифференциальной полной проводимости, и сравнение с пороговым значением ΔYlev дифференциальной полной проводимости, повторяются.
[0062] Как описано выше, в варианте реализации 2 настоящего изобретения, начальное значение времени Tm подачи команды вектора напряжения, установленное произвольно, устанавливается как значение, близкое к нулю, и величина |ΔY| дифференциальной полной проводимости вычисляется из сохраненных значений тока, полученных, когда команды V1-V6 вектора напряжения, каждая, последовательно выводятся в течение установленного времени Tm подачи посредством использования выражения (14). Затем, в то время как расчетная величина |ΔY| сравнивается с заданным пороговым значением ΔYlev дифференциальной полной проводимости, значение установки времени Tm подачи последовательно увеличивается на ΔT, пока не будет выполнено соотношение |ΔY|≥ΔYlev. Затем, когда выполнено |ΔY|≥ΔYlev, время Tm подачи команды вектора напряжения устанавливается, как время Та подачи команды вектора напряжения. Таким образом, степень магнитного насыщения может быть оценена соответственно, и без участия человека, блок 6 оценки положения может точно оценить положение ротора, и время Та подачи команды вектора напряжения может быть автоматически отрегулировано до значения, которое не позволяет току, текущему в роторной электрической машине 1, стать слишком большим.
[0063] Кроме того, вычисляется значение |Im|, которое является наибольшим абсолютным значением из 18-ти сохраненных значений тока, сохраняемых в блоке 5 хранения, и определяется, действительно ли значение |Im| является меньшим, чем максимальное значение Imax тока, в соответствие с чем может быть также выполнена операция предупреждения для указания того, что оценка положения невозможна.
[0064] В вышеприведенном описании, как показано на Фиг. 8, малое значение, которое заведомо не приводит к магнитному насыщению, то есть, значение, близкое к нулю, устанавливается как начальное значение времени Tm подачи, и устанавливаемое время Tm подачи последовательно увеличивается на величину ΔT, пока не будет определено, что выполняется соотношение |ΔY|≥ΔYlev. Однако, вместо этого, большое значение, которое заведомо приводит к магнитному насыщению, может быть установлено как начальное значение времени Tm подачи, и значение установки времени Tm подачи может быть последовательно уменьшено на величину ΔT до тех пор, пока не будет выполнено соотношение |ΔY|<ΔYlev. Затем, значение, полученное добавлением ΔT к установленному времени Tm подачи, когда выполнено соотношение |ΔY|<ΔYlev, может быть установлено как время Та подачи команды вектора напряжения. Также, в этом случае, соответственно устанавливая начальное значение времени Tm подачи, фактически может быть получен тот же самый эффект, как и в случае на Фиг. 8,.
[0065] ВАРИАНТ РЕАЛИЗАЦИИ 3
Желательно, чтобы заданное пороговое значение ΔYlev дифференциальной полной проводимости вышеупомянутого варианта реализации 1 или 2 было установлено как величина дифференциальной полной проводимости, которая позволяет блоку 6 оценки положения оценить положение точно и не позволить току, текущему в роторной электрической машине 1, стать слишком большим. Поэтому, например, если наступает достаточное магнитное насыщение, когда суммарное значение тока составляет 10% от номинального значения тока роторной электрической машины 1, дифференциальная полная проводимость, соответствующая случаю, когда суммарное значение тока составляет 10% от номинального значения тока, устанавливается как пороговое значение ΔYlev дифференциальной полной проводимости. Такое пороговое значение ΔYlev дифференциальной полной проводимости может изменяться в зависимости от типа или мощности роторной электрической машины 1.
[0066] Поэтому, в случае, когда, например, пороговое значение ΔYlev дифференциальной полной проводимости установлено в связи с номинальным значением тока роторной электрической машины 1, и оценка положения для ротора выполнена с использованием времени Та подачи, отрегулированным на основании установки порогового значения ΔYlev дифференциальной полной проводимости, имеется вероятность того, что точность оценки положения ухудшится. Соответственно, в настоящем варианте реализации 3, способ установки порогового значения дифференциальной полной проводимости описывается в предположении того, что способ установки применим к роторным электрическим машинам различных типов или с различными мощностями.
Все прочее, кроме того, как установить пороговое значение ΔYlev дифференциальной полной проводимости, то же самое, как и в вышеупомянутых вариантах реализации 1 и 2, и поэтому описание этого всего опущено.
[0067] В случае, когда блок 3 подачи напряжения является инвертором, например, напряжения, как описано выше, вектор напряжения, выводимый из блока 3 подачи напряжения, представляет собой импульс напряжения, как показано на Фиг. 6. В случае, когда роторная электрическая машина 1 представляет собой синхронную машину, импеданс роторной электрической машины имеет вид R+sL (R: сопротивление обмотки, L: индуктивность, s: оператор Лапласа). Если импульс напряжения на Фиг. 6 рассматривать как ступенчатое изменение напряжения, то ток Is(s), текущий в роторной электрической машине 1 в это же время может быть представлен выражением (21).
[0068]  (21)
(21)
[0069] Если выражение (21) преобразовать во временную область посредством обратного преобразования Лапласа, то получится выражение (22). На Фиг. 9 показан график выражения (22).
[0070]  (22)
(22)
[0071] Как видно из выражения (22), окончательное значение тока is(t) в случае, когда применяется ступенчатое изменение напряжения с амплитудой Vdc, получается при стремлении времени t к бесконечности, то есть, это значение - Vdc/R. Однако, в случае общей роторной электрической машины, окончательное значение Vdc/R оказывается все-таки большим, чем номинальный ток роторной электрической машины. Кроме того, вектор напряжения, выводимый из блока 3 подачи напряжения не является ступенчатым изменением напряжения, но импульсным напряжением с временем Tm подачи, при котором ток, текущий в роторной электрической машине 1, оказывается все-таки меньшим, чем Vdc/R. Поэтому, ток, текущий в роторной электрической машине 1, когда подается импульсное напряжение, как показано на Фиг. 6, может быть аппроксимирован прямой линией с наклоном, представляющим собой дифференциальное значение в начале (время 0), как видно из выражения (23).
[0072]  (23)
(23)
[0073] Поэтому, подставляя время Tm подачи вектора напряжения вместо переменной t в выражение (23), значение тока, текущего в роторной электрической машине 1, когда подается вектор напряжения с временем Tm подачи, может быть вычислено как показано выражением (24).
[0074]  (24)
(24)
[0075] Поскольку значение тока, текущего в роторной электрической машине 1, может быть вычислено так, как показано выражением (24), абсолютная величина сохраненного значения тока iu1 U-фазы, сохраненного в блоке 5 хранения, когда подается вектор V1 напряжения, представляется выражением (25).
[0076]  (25)
(25)
(где Lu1 - индуктивность в направлении V1)
[0077] Аналогично, величины сохраненных значений iu4, iv3, iv6, iw5, и iw2 тока вычисляются так, как показано выражениями (26)-(30), соответственно.
[0078]  (26)
(26)
(где Lu4 - индуктивность в направлении V4)
 (27)
(27)
(где Lv3 - индуктивность в направлении V3)
 (28)
(28)
(где Lv6 - индуктивность в направлении V6)
 (29)
(29)
(где Lw5 - индуктивность в направлении V5)
 (30)
(30)
(где Lw2 - индуктивность в направлении V2)
[0079] Поскольку сохраняемые значения iu1, iu4, iv3, iv6, iw5, и iw2 тока представлены выражениями (25)-(30), в случае, когда время подачи команды вектора напряжения составляет Tm, дифференциальные полные проводимости, вычисляемые выражениями (18)-(20), представляются выражениями (31)-(33), при замене выражений (25)-(30) на выражения (18)-(20), в которых Та заменяется на Tm. Здесь, значение выражений (31)-(33) заключается в вычислении разности между обратными величинами индуктивностей, обусловленной магнитным насыщением в положениях, где фазы различаются на 180 градусов друг от друга в роторной электрической машине 1.
 (31)
(31)
 (32)
(32)
 (33)
(33)
[0081] Поскольку дифференциальная полная проводимость вычисляется как разность между обратными величинами индуктивности, если пороговое значение ΔYlev дифференциальной полной проводимости установлено в значении, полученном как функция обратной величины индуктивности самой роторной электрической машины 1, пороговое значение ΔYlev дифференциальной полной проводимости также изменяется соответственно с изменением типа, или с изменением мощности роторной электрической машины. Таким образом, становится возможным регулировать время Та подачи команды вектора напряжения независимо от типа или мощности роторной электрической машины.
Конкретно, в случае, когда индуктивность роторной электрической машины 1 составляет Lm, пороговое значение ΔYlev дифференциальной полной проводимости устанавливается в значении, полученном как функция 1/Lm, что является обратной величиной индуктивности Lm роторной электрической машины 1, например, пропорционально 1/Lm, например, 5% или 10% от 1/Lm. Затем, время Та подачи команды вектора напряжения автоматически регулируется той же самой процедурой, как и в варианте реализации 1 или в варианте реализации 2.
[0082] Как описано выше, в варианте реализации 3 настоящего изобретения, пороговое значение ΔYlev дифференциальной полной проводимости, устанавливаемое в блоке 7 регулирования, устанавливается в значении, полученном как функция обратной величины индуктивности Lm роторной электрической машины 1, например, значении, полученном умножением обратной величины на коэффициент. Таким образом, независимо от типа или от мощности роторной электрической машины 1, степень магнитного насыщения может быть оценена соответственным образом, и без участия человека, блок 6 оценки положения может оценить положение ротора точно, и время Та подачи команды вектора напряжения может быть автоматически отрегулировано до значения, которое не позволяет току, текущему в роторной электрической машине 1, стать слишком большим.
Изобретение относится к области электротехники и может быть использовано для управления электрической машиной без использования датчика положения. Технический результат - повышение точности оценки степени магнитного насыщения и минимально необходимого значения времени подачи, которое позволяет осуществить оценку положения ротора. В устройстве управления блок (5) хранения сохраняет значения токов, протекающих, когда блок (3) подачи напряжения подает векторы напряжения на трехфазную роторную электрическую машину (1). Блок (6) оценки положения оценивает положение ротора электрической машины (1) в состоянии останова на основании сохраненных значений токов. Блок (7) регулирования регулирует минимально необходимое время Та подачи команд, которое позволяет перевести электрическую машину (1) в состояние магнитного насыщения посредством подачи вектора напряжения, чтобы обеспечить возможность оценки положения ротора. Блок (7) регулирования для оценки регулирования использует величину |ΔY| дифференциальной полной проводимости, полученную делением суммарного значения сохраняемых токов на значение амплитуды напряжения команды вектора напряжения, когда вектор напряжения подается при времени подачи, установленном как произвольное время Tm подачи, и регулирует время подачи на основании |ΔY|. 10 з.п. ф-лы, 9 ил.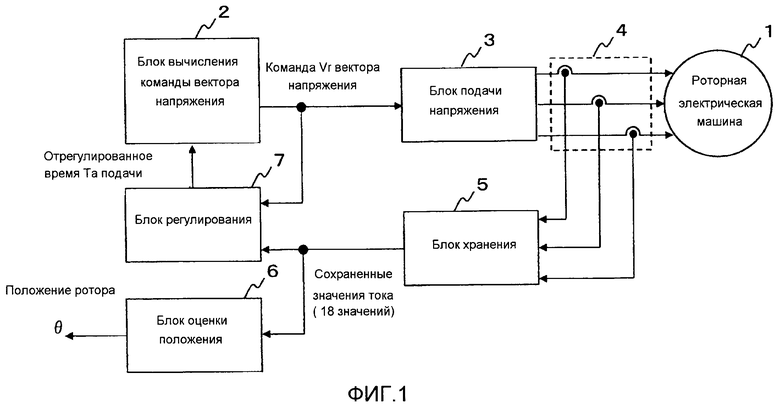
1. Устройство управления для роторной электрической машины, которое управляет роторной электрической машиной, имеющей обмотки для n фаз, где n - натуральное число, равное или большее чем 3, причем устройство управления содержит
блок подачи напряжения для подачи вектора напряжения на основании команды вектора напряжения на роторную электрическую машину;
блок детектирования тока для детектирования тока, протекающего в обмотке для каждой фазы роторной электрической машины;
блок вычисления команды вектора напряжения для вычисления в качестве команды вектора напряжения команд 2n векторов напряжения, имеющих ту же самую амплитуду, фазы, разделенные на равные интервалы в один период (360 градусов), и то же самое время подачи, и вывода команд 2n векторов напряжения на блок подачи напряжения;
блок хранения для хранения в качестве сохраняемых значений тока 2n×n токов, детектированных для соответствующих фаз блоком детектирования тока, когда при том же самом условии поданы 2n векторов напряжения;
блок оценки положения для оценки положения ротора роторной электрической машины в состоянии останова на основании сохраненных значений тока из блока хранения; и
блок регулирования для регулирования времени подачи до минимально необходимого времени Та подачи, которое позволяет роторной электрической машине войти в состояние магнитного насыщения, когда поданы векторы напряжения так, чтобы обеспечить возможность оценки положения ротора,
причем блок регулирования вычисляет значение оценки регулирования на основании отношения между значением амплитуды напряжения команд вектора напряжения и сохраненными значениями тока из блока детектирования тока в случае, когда вектор напряжения на основании команды вектора напряжения подается при времени подачи, установленном как произвольное время Tm подачи, и регулирует время подачи на основании значения оценки регулирования.
2. Устройство управления для роторной электрической машины по п. 1, в котором блок регулирования устанавливает в качестве времени Та подачи время Tm подачи, которое приводит к тому, что значение оценки регулирования становится минимальным, в диапазоне большем, чем заданное пороговое значение регулирования.
3. Устройство управления для роторной электрической машины по п. 2, в котором блок регулирования
устанавливает начальное значение времени Tm подачи на малое значение, которое заведомо не приводит к магнитному насыщению, для вычисления значения оценки регулирования, и
определяет соотношение величин между значением оценки регулирования и значением порога регулирования,
повторяет операцию определения, последовательно увеличивая время Tm подачи на время ΔT, и
устанавливает в качестве времени Та подачи время подачи Tm, соответствующее тому моменту, в который результат определения удовлетворяется (значение оценки регулирования > порогового значения регулирования) в первый раз.
4. Устройство управления для роторной электрической машины по п. 2, в котором блок регулирования
устанавливает начальное значение времени Tm подачи на большое значение, которое заведомо приводит к магнитному насыщению, для вычисления значения оценки регулирования и определяет соотношение величин между значением оценки регулирования и значением порога регулирования,
повторяет операцию определения, последовательно уменьшая время Tm подачи на время ΔТ, и
устанавливает в качестве времени Та подачи значение, полученное добавлением времени ΔТ к времени Tm подачи, соответствующему тому моменту, когда результат определения удовлетворяется (значение оценки регулирования < значения порога регулирования) в первый раз.
5. Устройство управления для роторной электрической машины по п. 1, в котором блок регулирования вычисляет наибольшее значение тока, которое является наибольшим из сохраненных значений тока, и выполняет операцию регулирования при условии, что наибольшее значение тока меньше, чем заданное максимальное значение тока.
6. Устройство управления для роторной электрической машины по п. 1, в котором блок хранения сохраняет в качестве сохраняемого значения тока максимальное значение тока, детектированное в течение периода сохранения от начала подачи каждой команды вектора напряжения до начала подачи следующей команды вектора напряжения.
7. Устройство управления для роторной электрической машины по п. 1, в котором блок хранения сохраняет в качестве сохраняемого значения тока значение тока, детектированное в конце подачи каждой команды вектора напряжения.
8. Устройство управления для роторной электрической машины по любому из пп. 1-7, в котором блок оценки положения суммирует среди сохраненных значений тока, сохраненных в блоке хранения, значения токов, детектированных, когда подается пара векторов напряжения, имеющих фазы, отличающиеся на 180 градусов друг от друга, и имеющих те же самые фазы в качестве пар векторов напряжения, тем самым вычисляя n суммарных значений тока, и оценивает положение ротора роторной электрической машины в состоянии останова на основании n суммарных значений тока.
9. Устройство управления для роторной электрической машины по п. 8, в котором блок регулирования делит n суммарных значений тока на значение амплитуды напряжения вектора напряжения на основании команды вектора напряжения, тем самым вычисляя n дифференциальных полных проводимостей, и использует в качестве значения оценки регулирования величину вектора, составленного из n дифференциальных полных проводимостей.
10. Устройство управления для роторной электрической машины по п. 8, в котором блок регулирования делит n суммарных значений тока на величину (значение амплитуды напряжения)×(время подачи) вектора напряжения на основании команды вектора напряжения, тем самым вычисляя n дифференциальных полных проводимостей, и использует в качестве значения оценки регулирования величину вектора, составленного из n дифференциальных полных проводимостей.
11. Устройство управления для роторной электрической машины по п. 10, в котором блок регулирования использует в качестве порогового значения регулирования значение, полученное в качестве функции обратной величины индуктивности роторной электрической машины.
| RU 2132110 C1, 20.06.1999 | |||
| Переносный прибор для шабровки | 1932 |
|
SU34886A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7176644 B2, 13.02.2007 | |||
| US 6400118 B2, 04.06.2002 | |||
| СПОСОБ ЗАЩИТЫ РЫБ, ИХ ЛИЧИНОК И МОЛОДИ ОТ ПОПАДАНИЯ В ВОДОЗАБОРНЫЕ СООРУЖЕНИЯ | 2001 |
|
RU2182620C1 |
| Поверхность теплообмена | 1958 |
|
SU122567A1 |

