Изобретение может быть использовано в космической технике при сближении и стыковке двух космических объектов, практически одновременно выводимых на околокруговую орбиту со стартовых позиций одного космодрома для выполнения двухпусковой схемы полета к небесному телу за пределами околоземной орбиты, например к Луне. В двухпусковой схеме раздельно выводятся разгонный блок (РБ) и пилотируемый космический корабль (ПКК), а затем, после их стыковки, образованная связка с помощью разгонного импульса, выполняемого РБ, переводится на траекторию полета к небесному телу.
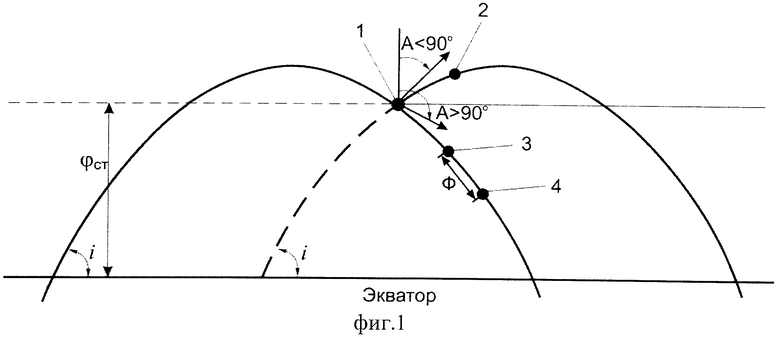
Известен способ управления, выбранный в качестве аналога, в котором используются стартовые позиции одного космодрома и второй (по времени выведения) космический объект (ВКО) стыкуется с первым (первоначально стартовавшим) космическим объектом (ПКО). Этот способ разработан для проведения сближения американских ПКК «Джемини» с третьей ступенью РН «Аджена». В этом способе использовалось выгодное расположение стартовых позиций космодрома на мысе Канаверал непосредственно у акватории Атлантического Океана, что обеспечивало безопасные районы падения отделяемых частей РН и позволяло выполнять старты РН в одну орбитальную плоскость с двух соседних витков (фиг.1). Наклонение орбиты i=28.84° выбиралось несколько большим, чем широта стартовой позиции φст=28.5° и ПКО выводился со стартовой позиции (поз.1) в восходящую часть витка (поз.2) с азимутом стрельбы чуть меньше 90°. Затем, на следующем витке плоскость орбиты ПКО вновь проходила через стартовую позицию, что позволило вывести на орбиту ВКО, но уже в нисходящую часть витка (поз.3) с азимутом стрельбы больше 90°. Плоскости орбиты ВКО и ПКО совпадали и при этом реализовалось необходимое угловое рассогласование Ф между объектами (ПКО находился впереди (поз.4)). После завершения фазирования ВКО, т.е. его естественного сближения с ПКО за счет разницы в высотах орбиты (ВКО находился ниже по высоте, чем ПКО), ВКО оказывался в зоне действия бортового радиолокатора сближения, позволяющего получить фактические параметры относительного вектора состояния стыкующихся объектов. После приложения импульсов сближения, характеристики которых были получены по фактическому относительному вектору состояния, ВКО приводился в окрестность ПКО. По данному способу, например, завершился успешной стыковкой полет ПКК «Джемини-11» со ступенью РН «Аджена» через 1 час 34 минуты после выведения, описанный в NASA Press kit (1966) “Project Gemini-11” [1].
Основным недостатком такого способа управления является то, что для его реализации требуется обязательное наличие районов падения отделяющихся частей при старте РН в одну орбитальную плоскость с двух соседних витков. Большинство космодромов мира, например космодром Байконур, такой возможностью не обладают.
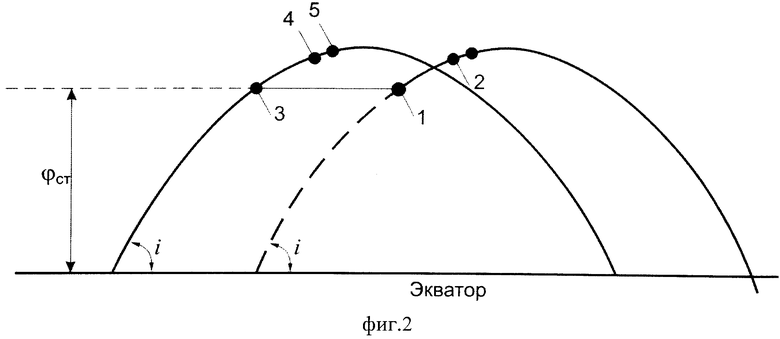
Известен способ управления, выбранный в качестве прототипа, в котором для обеспечения ускоренного сближения и последующей стыковки двух космических объектов использовалось выведение объектов на целевую орбиту суточной кратности со стартовых позиций одного космодрома и представленный на фиг.2. Вначале со стартовой позиции (поз.1) на орбиту суточной кратности выводится ПКО (поз.2). Круговая орбита суточной кратности при наклонении орбиты 50° имеет высоту 202 км. Ориентировочно через сутки, или через 16 витков плоскость орбиты ПКО будет проходить через стартовую позицию ВКО (поз.3), находящуюся в ближайшей окрестности от стартовой позиции ПКО, что и определяет время запуска РН с ВКО. В окрестности точки выведения ВКО на орбиту ИСЗ (поз.4) располагается и ПКО (поз.5). После приложения импульсов сближения к одному из объектов при таком способе можно быстро выполнить стыковку двух космических объектов. Такой способ управления неоднократно применялся при отработке стыковки, например двух космических кораблей «Космос-212» и «Космос-213», когда время между стартом корабля «Космос-213» и стыковкой составило всего 46 минут («Освоение космического пространства в СССР 1967-1970 гг.», М.: Наука, 1970. - прототип) [2].
Недостатком этого способа является продолжительное время - около суток между запусками ПКО и ВКО. В случае если первым объектом является ПКК, время стыковки со вторым объектом приходится на самый напряженный период деятельности экипажа, связанный с острым развитием адаптации к невесомости. Данное обстоятельство увеличивает риск невыполнения стыковки в случае необходимости перехода экипажа в ручной режим. Если же первым стартует РБ, то после его стыковки с ПКК к моменту выдачи разгонного импульса пройдет более суток, что существенно снизит энергетические возможности РБ из-за испарения криогенных составляющих топлива.
Техническим результатом изобретения является возможность ускоренной стыковки космических объектов, например в двухпусковой схеме полета к Луне, за несколько витков без существенного увеличения расхода топлива на сближение.
Технический результат достигается тем, что в способе управления движением стыкуемых космических объектов, включающем их выведение на целевые орбиты со стартовых позиций одного космодрома с последующим приложением импульсов сближения к одному из объектов, отличающемся тем, что выведение объектов осуществляют со сдвигом по времени Δt и с разницей Δi в наклонениях целевых орбит, приводящей к совмещению восходящих узлов орбит стыкуемых объектов, при этом Δi определяют с учетом значения Δt по формуле:

где i - наклонение орбиты второго выводимого космического объекта;
φст - географическая широта стартовой позиции второго выводимого космического объекта;
ωЗ - угловая скорость вращения Земли;
λ1ст, λ2ст - географические долготы стартовых позиций, используемых для выведения первого и второго космических объектов соответственно,
затем по разнице наклонений Δi определяют импульс, необходимый для совмещения плоскостей орбит стыкуемых объектов, который прикладывают к одному из стыкуемых объектов во время сближения в узле орбиты.
Технический результат в предлагаемом способе управления достигается за счет того, что старт и выведение второго объекта начинается на «фоне» выведения первого объекта. В результате сразу после выведения объекты располагаются между собой на небольшом фиксированном угловом расстоянии, но с некоторым рассогласованием плоскостей орбит. За счет небольшой разницы в наклонениях орбит удается совместить восходящие узлы орбит. Таким образом, рассогласование плоскостей ликвидируется дополнительным боковым импульсом, прикладываемым в узле одним из стыкуемых объектов. Реализовавшееся фиксированное начальное угловое рассогласование между объектами сокращается естественным путем (фазированием) за счет разницы в их угловых скоростях вращения вокруг небесного тела. Продолжительность этого процесса определяется высотной разницей между орбитами стыкуемых космических объектов. В пределе, при Δt=0S, т.е. при одновременном старте, космические объекты, также как и в прототипе, сразу после выведения могут оказаться в ближайшей окрестности. Правда такой вариант не обеспечивает необходимой безопасности космических объектов от соударения в процессе выведения РН и сразу после отделения от РН. Помимо безопасности, наличие дополнительного времени Δt позволяет убедиться в успешном старте ПКО до начала необратимых операций, связанных со стартом с ВКО. Так через Δt=300 секунд или 5 минут после старта на большинстве РН начинается устойчивый стационарный участок работы двигательной установки заключительной ступени (Steven J. Isakowitz (2004) "International Reference заключительной ступени (Steven J. Isakowitz (2004) "International Reference Guide to Space Launch Systems" Forth edition [3]). Это обстоятельство позволяет с высокой вероятностью гарантировать успешное выведение ПКО и разрешить выведение АКО с другой стартовой позиции для их последующей стыковки.
Из-за сдвига времен старта, вследствие вращения Земли, между плоскостями орбит ПКО и ВКО появляется угловое рассогласование, которое может быть ликвидировано выполнением бокового импульса ΔV в точке пересечения двух орбит. Величина этого импульса зависит от временного сдвига Δt между выведением обоих объектов и при большой задержке в старте ВКО может достигать значений, сопоставимых с запасом топлива на проведение сближения. Так, угловое рассогласование в 1° требует выполнения бокового импульса величиной 130 м/сек (Р.Ф. Аппазов, О.Г. Сытин «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987) [4]. Для снижения этой величины предлагается выведение стыкующихся объектов на целевые орбиты с разницей по наклонению, что позволит уменьшить величину угла между плоскостями двух орбит более чем в два раза при выведении космических объектов с космодрома Байконур и, соответственно, расход топлива на выполнение бокового импульса ΔV.
Сущность изобретения поясняется фиг.1÷4,
где на фиг.1 показана схема выведения ПКК «Джемини» со ступенью РН «Аджена»,
на фиг.2 приведена схема последовательного выведения двух космических объектов на орбиту суточной кратности [2],
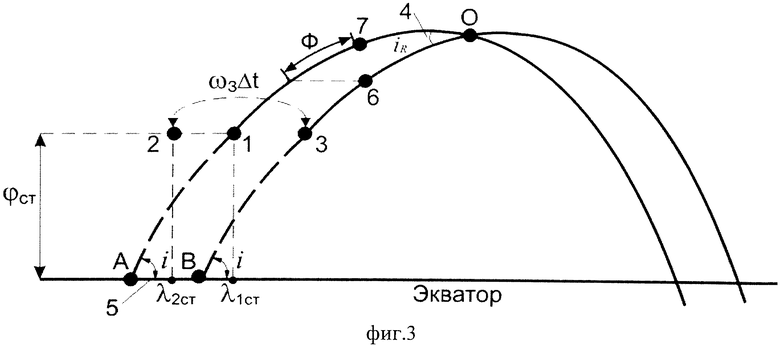
на фиг.3 поясняется появление углового рассогласования между плоскостями орбиты в случае раздельного старта космических объектов,
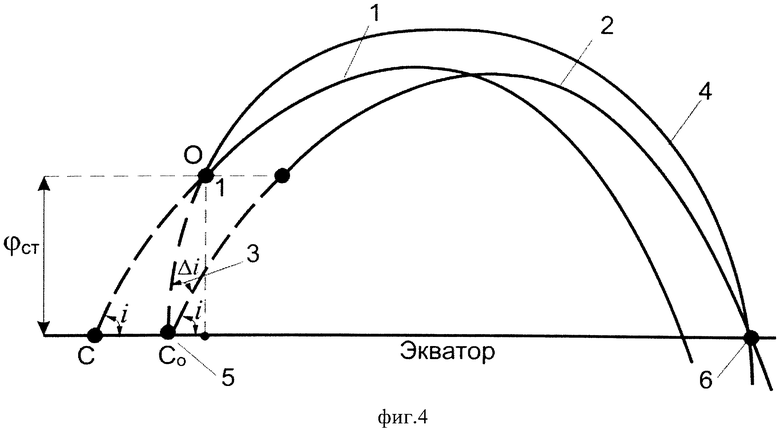
на фиг.4 представлена графическая схема расчета потребной разницы Δi в наклонении орбит ПКО и ВКО.
На фиг.3 поясняется появление углового рассогласования между плоскостями орбиты в случае раздельного старта космических объектов на орбиты с одинаковым наклонением i. Пусть стартовая позиция ПКО (поз.1) имеет географические координаты φст и λ1ст. Через время Δt в момент старта ВКО со своей стартовой позиции (поз.2) с географическими координатами φст и λ2ст Земля, вследствие вращения вокруг своей оси с угловой скоростью ωЗ, повернется на угол ωЗ·Δt вместе со стартовыми позициями, и стартовая позиция ВКО займет другое положение (поз.3) относительно орбиты ПКО. В результате после выведение ВКО на орбиту ИСЗ с наклонением i между плоскостями орбиты появится угол рассогласования ir0 (поз.4), а угол  между восходящими узлами орбит ПКО и ВКО (поз.5) составит:
между восходящими узлами орбит ПКО и ВКО (поз.5) составит:

Применяя уравнение косинусов для сферического треугольника ΔАОВ (фиг.3), получим:

Это угловое рассогласование необходимо будет ликвидировать в процессе сближения боковым импульсом ΔV в одной из точек пересечения орбит. В момент выведения ВКО (поз.6) ПКО занимает положение (поз.7), отличающееся на фазовый угол Ф между стыкующимися объектами, который является функцией временного сдвига Δt и равен:
 ,
,
где Т - период орбиты ПКО.
На фиг.4 представлена суть предлагаемого способа. Вместо выведения космических объектов на орбиты с одинаковым наклонением у ПКО (поз.1) и ВКО (поз.2) предлагается выводить ПКО с разницей в наклонении Δi (поз.3) таким образом, чтобы восходящие узлы орбит ПКО (поз.4) и ВКО (поз.2) совместились. В этом случае точка пересечения орбит будет лежать на экваторе (поз.5) в восходящем узле орбиты и в нисходящем узле (поз.6). Изменение наклонения орбиты на незначительный угол (менее 1°) допустимо для современных РН на участке работы последней ступени [3].
Определим потребную разницу Δi.
Аналогично углу , рассмотренному на фиг.3, дуга  из фиг.4
из фиг.4

Учитывая, что из сферического прямоугольного треугольника ΔОСВ

а из треугольника ΔOCOB:

получим:
или

Учитывая, что Δi→0, разложим первое слагаемое в уравнении (3) в ряд Тейлора, ограничившись первой производной:

тогда, после преобразований уравнение (3) примет вид:

или

после дальнейших преобразований получим:
или с учетом (2) окончательно:

Так как разница в наклонениях орбиты Δi является одновременно и углом между плоскостями орбит стыкуемых объектов, то потребное значение бокового импульса составит [4]:
где VO - орбитальная скорость вращения небесного тела вокруг Земли.
Определим эффективность введения разницы Δi в наклонениях орбит стыкующихся объектов. Допустим наклонение орбиты для выводимых космических объектов соответствует i=51.6° (см. фиг.3), сдвиг по времени между их выведением Δt=4 мин, а точки старта для ПКО и ВКО не отличаются по долготе, т.е. λ1ст=λ2ст. Тогда Δλ=ωЗ·Δt=1° и согласно уравнению (1) iR=0.784°. Для поворота плоскости орбиты на этот угол потребуется выполнить боковой импульс ΔV~130∗0.784°~102 м/сек.
Если же использовать выведение космических объектов на разные наклонения, то при широте стартовой позиции φст=46.5°, соответствующей широте космодрома Байконур, потребная разница в наклонениях орбиты согласно (4) составит Δi=0.321°, а потребная ΔV~42 м/сек. Таким образом, для космодрома Байконур эффективность применения этого способа составит К=iR/Δi~2.445.
Кроме того, из формулы (4) очевидно, что чем меньше значение выражения в скобках, тем меньше разница в наклонениях орбит и, следовательно, меньше затраты на боковой импульс, т.е. в предложенном способе более эффективно, чтобы стартовая позиция ПКО находилась западнее стартовой позиции ВКО или λ1ст<λ2ст.
Рассматривая уравнение (4), можно отметить также, что в случае, если наклонение орбиты соответствует широте стартовой позиции, т.е. i=φст, достигается максимальная эффективность, т.к. разница в Δi→0 и, соответственно ΔV→0. С другой стороны, для наклонения i=51.6° из уравнения (4), приравнивая величины Δi=iR=0.784°, можно определить, что φст~33.7°, т.е. использование данного способа при таких начальных условиях становится эффективным при наклонениях орбиты более 34÷35°.
Оценим длительность сближения объектов в зависимости от величины временного сдвига Δt и разницы средних высот целевых орбит ПКО и ВКО Δh. Так как средняя высота орбиты ПКО выше, то ВКО, отставая по начальному фазовому углу от ПКО, постепенно его догоняет со скоростью фазирования [4]:

Сдвиг по времени старта ПКО и ВКО приводит к появлению начального фазового угла между объектами: Ф=Δt·4°. Таким образом, сближение, т.е. ликвидация фазового угла, может произойти за:
где N - число витков до сближения.
Если к примеру высота орбиты Нмин×Нмакс ПКО составляет 190×350 км, а ВКО 200×240 км, то разница по средней высоте орбиты составит

Таким образом, из формулы (5) следует, что при разнице Δh в 50 км, каждая минута по сдвигу времени старта ВКО приводит к дополнительному витку по времени сближения с ПКО, т.е. 1 мин - 1 виток на сближение, 2 мин - 2 витка и т.д. Согласно формуле (5), для сокращения времени сближения необходимо насколько возможно уменьшать временной сдвиг Δt между стартами ПКО и ВКО, а также стремиться к увеличению разности средних высот Δh стыкующихся объектов.
В целом можно сделать вывод, что применение последовательного и почти одновременного запуска двух космических объектов, со стартовых позиций, принадлежащих одному космодрому для их последующей стыковки в целях выполнения двухпусковой схемы выведения ПКК, например на Луну, позволяет выполнить эту задачу значительно быстрее, чем в случае использования прототипа и с незначительными дополнительными топливными затратами.
Изобретение относится к космической технике и может быть использовано в управлении движением стыкуемых космических объектов (КО). Выводят КО на целевые орбиты со стартовых позиций одного космодрома со сдвигом по времени и с разницей в наклонениях целевых орбит для совмещения восходящих узлов орбит, зависящей от наклонения орбиты выводимого КО, географической широты стартовой позиции выводимого КО, угловой скорости вращения Земли и географических долгот стартовых позиций выводимых КО, определяют импульс для совмещения плоскостей орбит стыкуемых КО, прикладывают импульс сближения к одному из КО. Изобретение позволяет ускорить стыковку КО. 4 ил.
Способ управления движением стыкуемых космических объектов, включающий их выведение на целевые орбиты со стартовых позиций одного космодрома с последующим приложением импульсов сближения к одному из объектов, отличающийся тем, что выведение объектов осуществляют со сдвигом по времени Δt и с разницей Δi в наклонениях целевых орбит, приводящей к совмещению восходящих узлов орбит стыкуемых объектов, при этом Δi определяют с учетом значения Δt по формуле:

где i - наклонение орбиты второго выводимого космического объекта;
φст - географическая широта стартовой позиции второго выводимого космического объекта;
ωЗ - угловая скорость вращения Земли;
λ1ст, λ2ст - географические долготы стартовых позиций, используемых для выведения первого и второго космических объектов соответственно,
затем по разнице наклонений Δi определяют импульс, необходимый для совмещения плоскостей орбит стыкуемых объектов, который прикладывают к одному из стыкуемых объектов во время сближения в узле орбиты.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2440281C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2441821C1 |
| Устройство для стабилизации судна | 1981 |
|
SU1022867A1 |
| US 3700193 A1, 24.10.1972 | |||

