Предлагаемый способ управления может быть использован в космической технике при сближении и последующей стыковке двух космических объектов, находящихся на околокруговой орбите небесного объекта, например пилотируемого космического корабля, выводимого ракетоносителем (РН) в качестве выводимого космического объекта (ВКО) и международной космической станцией (МКС), в качестве другого космического объекта (ДКО).
Известен способ управления, выбранный в качестве аналога, в котором для обеспечения сближения и последующей стыковки двух космических объектов ВКО выводится в плоскость орбиты ДКО. Сразу после выведения выполняются первые два импульса сближения, предварительно определенные до старта ВКО по номинальным параметрам орбиты выведения. С помощью этих импульсов ВКО переводится на так называемую орбиту фазирования, на которой осуществляется ликвидация начального углового рассогласования между двумя объектами. Это происходит вследствие того, что, как правило, средняя высота орбиты ДКО находится выше средней высоты орбиты выведения ВКО и, следовательно, угловая скорость вращения вокруг небесного тела у ВКО выше, чем у ДКО. Ошибки в первых двух импульсах сближения из-за использования при их определении номинальных параметров орбиты выведения ликвидируются на следующем витке, после определения фактической орбиты с помощью двух корректирующих импульсов. Еще через виток проводится расчет двухимпульсного маневра, с помощью которого ВКО переводится в окрестность ДКО, где сближение завершается автоматической стыковкой. Срочное выполнение первых двух импульсов, определенных до старта ВКО, позволяет сократить время на сближение и стыковку с ДКО до четырех витков [1. Патент РФ №2490181 «Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом» 20.08.2013].
Недостатком этого способа является продолжительность стартового дня. Так, после подъема экипажа (~8 часов до старта), полета до МКС (~6 часов) и открытия люков для перехода в МКС (~1.5 часа) рабочий день составит около 16 часов. Из этого времени около 10 часов экипаж должен находиться в скафандрах. Поэтому задача дальнейшего сокращения времени доставки экипажа на МКС остается актуальной. Кроме того, отработка быстрых схем сближения очень важна для реализации двухпусковых схем сближения на Луну с использованием кислородно-водородных разгонных блоков, время рабочего существования которых ограничено несколькими часами.
Для реализации такого способа управления активным кораблем, помимо его выведения в плоскость орбиты МКС [1], необходимо обеспечить, чтобы начальный фазовый угол между космическими объектами находился в определенном фазовом диапазоне шириной около 25°. Для обеспечения этого условия на момент старта ВКО требуется предварительное маневрирование ДКО. К апрелю 2016 года была проведена 21 успешная стыковка по этому способу и опыт их проведения показывает, что обеспечение фазового диапазона шириной около 25° вполне реализуемо.
Известен способ управления движением ВКО, сближающегося с ДКО, выбранный в качестве прототипа [2. Патент РФ №2441821 «Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом» 10.02.2012]. Этот способ разработан для проведения сближения и последующей стыковки двух космических объектов, находящихся на околокруговой орбите небесного объекта, например пилотируемого космического корабля, выводимого РН в качестве ВКО и МКС, в качестве ДКО. Способ включает выведение ВКО на опорную орбиту, некомпланарную орбите ДКО, с отклонением по долготе восходящего узла орбиты на величину ΔλВУ и по наклонению Δi, но с заданным рассогласованием по аргументу широты ΔΦ, позволяющим выполнить задачу сближения в компланарной постановке за заданное число витков. Для согласования плоскостей орбит ВКО и ДКО при прохождении ВКО окрестности линии пересечения обоих плоскостей в перпендикулярном направлении к плоскости выведения, выполняют импульс ΔVб. Затем, после прихода ВКО в апогей орбиты, проводится маневр ΔVсбл, переводящий ВКО в окрестность ДКО. Техническим результатом изобретения является возможность сокращения продолжительности сближения с ВКО вплоть до одного витка за счет формирования необходимого начального углового рассогласования между объектами.
Основным недостатком такого способа управления является необходимость выполнения импульса для согласования плоскостей, требующего дополнительных затрат топлива.
Техническим результатом изобретения является сокращение продолжительности сближения до двух витков с ДКО практически при минимальных дополнительных затратах на сближение. При этом обеспечивается расширение диапазона начальных фазовых углов или фазовый диапазон до 25÷30°, что соответствует реализованной четырехвитковой схеме сближения.
Технический результат достигается благодаря тому, что в способе управления движением космического объекта при сближении с другим космическим объектом, включающем выведение космического объекта на целевую орбиту с отклонением от плоскости орбиты другого космического объекта по долготе восходящего узла орбиты на величину ΔλВУ и по наклонению на величину Δi, но с заданным рассогласованием по аргументу широты ΔΦ, после чего в окрестности линии пересечения плоскостей орбит обоих объектов в перпендикулярном направлении к плоскости выведения на первом витке полета после выведения выполняют импульс ΔVб, приводящий к совпадению плоскостей орбит сближающихся объектов, в отличие от известного, по номинальным параметрам опорной орбиты выведения определяют характеристики импульса сближения ΔVсбл на момент времени, совпадающий с моментом выполнения импульса ΔVб, и прикладывают ΔVсбл к выводимому объекту одновременно с импульсом ΔVб, а затем определяют характеристики т импульсов сближения по фактическим параметрам орбиты выводимого космического объекта, где m=1, 2, …, которые прикладывают на следующем витке сближения.
Предлагаемый способ рассмотрим на примере. Пусть в качестве ДКО рассматривается орбитальная станция, например МКС, к которой должен пристыковаться космический корабль «Союз-МС». Корабль «Союз-МС» выводится на опорную орбиту с помощью РН. Если выводиться в плоскость орбиты МКС и при этом поставить задачу состыковаться в течение 2-х витков, то допустимый фазовый диапазон составит около 6°. Для обеспечения такой точности потребуется до старта КК «Союз-МС» проведение множества прецизионных маневров МКС для формирования необходимых параметров монтажной орбиты. Эта операция потребует расхода большого количества топлива. Для расширения фазового диапазона без проведения прецизионных маневров МКС можно сместить время старта либо на более раннее, либо на более позднее по сравнению со временем старта, соответствующим компланарному выведению. При этом обеспечивается нахождение значения начального фазового угла в допустимом фазовом диапазоне, позволяющем проводить сближение за заданное число витков. Возникающий при этом межорбитальный угол необходимо ликвидировать в определенной точке витка приложением импульса в направлении, перпендикулярном плоскости орбиты ΔVб.
Технический результат в предлагаемом способе управления достигается за счет того, что при одновременном выполнении импульса для согласования плоскостей ΔVб и импульса сближения ΔVсбл, определенного по номинальным параметрам опорной орбиты выведения ВКО, удается уменьшить затраты топлива на согласование плоскостей и осуществить переход на фазирующую орбиту практически сразу после выведения на опорную орбиту, не ожидая определения фактических параметров опорной орбиты выведения ВКО для завершения сближения с ДКО за минимальное время.
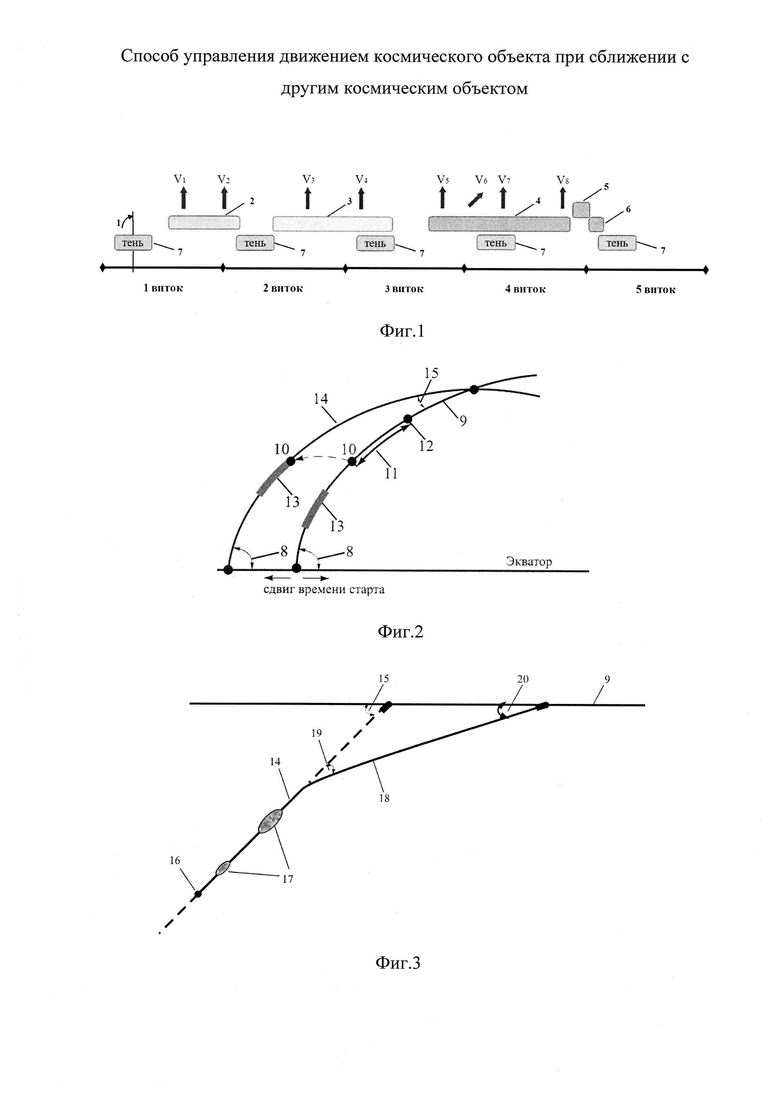
Сущность изобретения поясняется на фиг. 1÷6, где:
на фиг. 1 показана циклограмма аналога - четырехвитковой схемы сближения,
на фиг. 2 представлена схема выведения прототипа на опорную квазикомпланарную орбиту со сдвигом времени старта, обеспечивающим отклонение от плоскости орбиты ДКО по долготе восходящего узла орбиты на величину Δλ0 за счет сдвига времени старта ВКО на опорную орбиту,
на фиг. 3 представлена схема выведения прототипа на опорную квазикомпланарную орбиту с отклонением от плоскости орбиты ДКО как по долготе восходящего узла орбиты, так и по наклонению за счет изменения азимута стрельбы,
на фиг. 4 показана циклограмма предлагаемого способа управления - двухвитковой схемы сближения,
на фиг. 5 представлены графики затрат характеристической скорости на сближение в зависимости от значения начального фазового угла для проведения двухвитковой и четырехвитковой схем сближения при компланарном выведении ВКО,
на фиг. 6 представлены графики затрат характеристической скорости на сближение для проведения двухвитковой схемы сближения при компланарном выведении ВКО и при использовании предлагаемого способа.
На фиг. 1 показана циклограмма четырехвитковой схемы сближения. После выведения КК 1 выполняется двухимпульсный маневр перехода на орбиту фазирования 2. Этот маневр рассчитывается до старта в предположении о номинальном выведении КК на опорную орбиту. На следующем витке выполняется корректирующий маневр 3, также состоящий из двух импульсов. Цель этого маневра компенсировать ошибки первого маневра из-за отличия фактической орбиты выведения от номинальной орбиты. Затем выполняется автономный участок сближения 4. Этот участок имеет продолжительность около витка и содержит несколько импульсов сближения. По завершении автономного участка выполняются заключительные операции по стыковке: облет 5 и причаливание 6. Начало автономного участка определяется, таким образом, чтобы причаливание (6) завершалось по началу тени на орбите 7.
На фиг. 2 схематично представлена возможность приведения начального фазового угла в заданный фазовый диапазон за счет сдвига времени старта ВКО, т.е. изменения долготы восходящего узла орбиты ВКО с сохранением наклонения орбиты 8, соответствующего наклонению 8 плоскости орбиты ДКО 9. При компланарном выведении ВКО 10 выводится в плоскость орбиты ДКО 9, но начальное значение фазового угла 11 между ДКО 12 и ВКО 10 не находится в допустимом фазовом диапазоне 13. При выведении ВКО на опорную квазикомпланарную орбиту, за счет сдвига времени старта, можно добиться, чтобы в момент выведения начальный фазовый угол находился в допустимом фазовом диапазоне 13. В этом случае между плоскостями орбит ВКО 14 и ДКО 9 появляется межорбитальный угол iR0 15. Сдвиг времени старта в зависимости от расположения ВКО 10 относительно заданного фазового диапазона 13 может быть как в более раннее (относительно компланарного выведения), так и более позднее время. Схема, представленная на фиг. 2, соответствует сдвигу времени старта в более позднее время.
На фиг. 3 представлена схема выведения прототипа на опорную квазикомпланарную орбиту с отклонением от плоскости орбиты ДКО как по долготе восходящего узла орбиты, так и по наклонению за счет изменения азимута стрельбы. Предполагается, что после старта РН 16 на начальном этапе выведения ВКО выводится на орбиту 14. Этой трассе соответствует орбита ВКО с отличным от орбиты ДКО значением восходящего узла орбиты (см. фиг. 2), но с наклонением орбиты, соответствующим наклонению 8 плоскости орбиты ДКО 9. При таком подходе обеспечивается падение 1-ой и 2-ой ступеней РН в выделенные для них районы падения 17. На участке работы 3-ей ступени РН 18 полет выполняется с измененным азимутом стрельбы РН 19. В результате, как видно из фиг. 3, новое значение межорбитального угла 20 будет меньше, чем при выведении без изменения азимута стрельбы 15. Меньший межорбитальный угол потребует меньших затрат топлива на последующее согласование плоскостей орбит.
На фиг. 4 показана циклограмма предлагаемого способа управления, реализующая двухвитковую схему сближения. В отличие от четырехвитковой схемы в зоне номинального маневра 2, проводится только один импульс в окрестности линии пересечения плоскостей орбит ВКО и ДКО. Этот импульс комбинированный и имеет две составляющие: боковой импульс ΔVб для согласования плоскостей 21 и трансверсальный импульс сближения ΔVсбл 22.
На фиг. 5 представлены графики затрат характеристической скорости на сближение в зависимости от значения начального фазового угла для проведения двухвитковой 23 и четырехвитковой 24 схем сближения при компланарном выведении ВКО. Пологая часть обоих графиков соответствует допустимому фазовому диапазону начальных фаз для сближения с минимальными затратами характеристической скорости. Из графиков видно, что допустимый фазовый диапазон для четырехвитковой схемы 24 значительно превышает фазовый диапазон для двухвитковой схемы 22.
На фиг. 6 представлены графики затрат характеристической скорости для проведения двухвитковой схемы сближения при компланарном выведении ВКО 23 и при использовании предлагаемого способа 25 с квазикомпланарным выведением и приложением комбинированного (из двух составляющих ΔVб и ΔVсбл) номинального маневра. Как видно из графиков при использовании предлагаемого способа управления, удается существенно расширить разрешенный фазовый диапазон для двухвитковой схемы, доведя его размер до соответствующего диапазона для четырехвитковой схемы при компланарном выведении ВКО. Из графиков следует, что дополнительные затраты характеристической скорости на расширение допустимого фазового диапазона не превысят 3÷5 м/с.
Рассмотрим пример. Существующий размер допустимого фазового диапазона для двухвитковой схемы сближения при компланарном выведении ВКО составляет ±3° (фиг. 5). Допустим, необходимо дополнительно расширить допустимый фазовый диапазон на ±10°. Как представлено на фиг. 2, для приведения начального фазового угла ВКО в допустимый фазовый диапазон необходимо сдвинуть время старта в более позднее время по сравнению со временем старта для крайней левой границы из допустимого диапазона фаз. Соответственно орбита выведения ВКО относительно случая компланарного выведения расположится западнее (как на фиг. 2). Если за виток (~90 минут) фазовый угол полностью изменяется на 360°, то за 1 минуту соответственно на 4°. Для «условного» одностороннего расширения фазового диапазона на 10° необходимо сдвинуть время старта на ~150 секунд. Этому времени будет соответствовать сдвиг значения восходящего узла орбиты выведения относительно орбиты ДКО на Δλ0=~-0.65° [3. Р.Ф. Муртазин «Схемы ускоренного доступа к орбитальной станции для современных космических кораблей», ж. Космические исследования, 2014, том 52, №2, с. 162-175].
Для «условного» расширения фазового диапазона на 10° относительно правой границы допустимого диапазона фаз необходимо также сдвинуть время старта на ~150 секунд, но уже в более раннее время относительно правой границы. Это приведет к тому, что значение восходящего узла орбиты изменится на Δλ0=~+0.65°, а плоскость опорной орбиты выведения ВКО относительно орбиты ДКО расположится восточнее.
Межорбитальный угол между орбитами ВКО и ДКО можно определить по формуле косинусов:

т.е. при рассогласовании плоскостей по долготе восходящего узла орбиты Δλ0 на ±0.65° в точках пересечения орбит появляется межорбитальный угол iR0=±0.51°. Как известно, для ликвидации межорбитального угла между двумя плоскостями величиной 1° потребуется около 130 м/с [4. Р.Ф. Аппазов, О.Г. Сытин «Методы проектирования траекторий носителей и спутников Земли», Москва, Наука, 1987]. Таким образом, рассогласование плоскостей орбит в 0.51° потребует выполнения в точке пересечения орбит ВКО и ДКО бокового импульса ΔVб=~66 м/с. Если же, совместно со сдвигом времени старта, выполнить выведение ВКО на орбиту с наклонением, несколько отличным от наклонения ДКО, то можно дополнительно уменьшить величину ΔVб. Так, согласно [3] при запуске ВКО с к. Байконур значение AV6 можно снизить в 2.65 раза до 25 м/с.
Для последующего снижения затрат характеристической скорости на сближение предлагается следующее. Если совместить выполнение импульса ΔVб с импульсом сближения ΔVсбл, то, за счет векторного сложения, можно дополнительно уменьшить затраты характеристической скорости на расширение допустимого фазового диапазона. На фиг. 6 представлены результаты моделирования двухвитковой схемы сближения. Согласно этим результатам расширение фазового диапазона до 30-32° потребует дополнительных затрат характеристической скорости не более 3÷5 м/сек. Таким образом, представленный способ позволяет обеспечить условия для проведения быстрого двухвиткового сближения практически при минимальных дополнительных затратах на сближение.
Отработка новой схемы сближения с МКС может быть выполнена с использованием ТГК «Прогресс-МС» или КК «Союз-МС», имеющих возможности получать знание вектора состояния без привязки к наземным измерительным пунктам с помощью автономной системы навигации (АСН). Для выведения этих космических объектов может быть использована РН «Союз-2 1А» с цифровой системой управления, позволяющей выводить КК на квазикомпланарную орбиту по сравнению с орбитой МКС.

Изобретение относится к стыковке двух космических объектов на околокруговой орбите, например пилотируемого выводимого космического корабля (ВКК) и международной космической станции (МКС) в качестве цели. ВКК выводят на опорную орбиту, имеющую отклонение от орбиты цели по долготе восходящего узла и по наклонению, но с заданным рассогласованием по аргументу широты. В окрестности линии пересечения плоскостей этих орбит выполняют импульс 

Способ управления движением космического объекта при сближении с другим космическим объектом, включающий выведение космического объекта на целевую орбиту с отклонением от плоскости орбиты другого космического объекта по долготе восходящего узла орбиты на величину ΔλВУ и по наклонению - на величину Δi, но с заданным рассогласованием по аргументу широты ΔФ, после чего в окрестности линии пересечения плоскостей орбит обоих объектов в перпендикулярном направлении к плоскости выведения на первом витке полета после выведения выполняют импульс ΔVб, приводящий к совпадению плоскостей орбит сближающихся объектов, отличающийся тем, что по номинальным параметрам опорной орбиты выведения определяют характеристики импульса сближения ΔVсбл на момент времени, совпадающий с моментом выполнения импульса ΔVб, и прикладывают импульс ΔVсбл к выводимому объекту одновременно с импульсом ΔVб, а затем определяют характеристики m импульсов сближения по фактическим параметрам орбиты выводимого космического объекта, где m=1, 2, .., которые прикладывают на следующем витке сближения.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2441821C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2012 |
|
RU2490181C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178761C1 |
| СПОСОБ И СИСТЕМА ВЫВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТУ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ, ОБЛАДАЮЩИХ БОЛЬШИМ УДЕЛЬНЫМ ИМПУЛЬСОМ | 1997 |
|
RU2212363C2 |
| US 3700193 A, 24.10.1972. | |||

