Предлагаемый способ управления может быть использован в космической технике при сближении и последующей стыковке двух космических объектов, например пилотируемого космического корабля, выводимого ракетой-носителем (РН) в качестве космического объекта (КО) и орбитальной станции (ОС) в качестве другого космического объекта (ДКО), находящегося на околокруговой орбите небесного тела.
Известен способ управления взлетным модулем лунного корабля «Eagle» при сближении с командным модулем корабля «Apollo-11», выбранный в качестве аналога, включающий выведение взлетного модуля в плоскость орбиты командного модуля и проведение их сближения и стыковки. Взлетный модуль, используемый в качестве КО, выводился с поверхности Луны на орбиту с высотой перицентра/апоцентра Нπ/Нα=18/83 км (10/45 морских миль), а командный модуль, исполнявший роль ДКО, находился на круговой окололунной орбите высотой Н=111 км (60 морских миль). В момент выведения КО плоскости орбит двух объектов совпадали, а необходимое начальное рассогласование по аргументу широты между КО и ДКО (фазовый угол) обеспечивалось за счет маневрирования ДКО. Сближение предусматривало последовательное выполнение ряда простых коррекций для перехода КО на промежуточную орбиту, коэллиптическую по отношению к орбите ДКО с разницей по высоте на величину ΔН [1. Kennet A. Young, James D. Alexander, Apollo Lunar Rendezvous, Journal Spacecraft, vol. 7, №9, 1970]. В течение полвитка после выведения КО был переведен на промежуточную орбиту, коэллиптическую по отношению к орбите ДКО, высотой Н=83 км (45 морских миль), то есть с разницей высот ΔН=28 км (15 морских миль). Затем начинался заключительный этап, на котором расчет маневров сближения для перехода КО в окрестность ДКО выполнялся на борту КО в автоматическом режиме. При сближении с промежуточной орбиты, коэллиптической орбите ДКО, повышается надежность и безопасность стыковки в случае срыва режима автоматического сближения, а также обеспечивается удобство управления КО в ручном режиме без использования средств измерений взаимного положения КО и ДКО. Приблизительно за полвитка до стыковки КО пересекает т.н. линию Гомана, вдоль которой ДКО наблюдается под углом 26.5° над местным горизонтом, соответствующем окололунной орбите. Приложение импульса вдоль вектора скорости КО в этой точке обеспечивает гомановский переход на орбиту ДКО. Величина импульса, необходимого для перехода КО в окрестность ДКО, зависит от разности высот коэллиптических орбит АН и определяется по формуле [2. Р.Ф. Аппазов, О.Г. Сытин, «Методы проектирования траектории носителей и спутников Земли», Москва, Наука, 1987]

где μ - гравитационная постоянная, rН - радиус коэллиптической орбиты КО, rК - радиус орбиты ДКО и rК=rН+ΔН.
Так в случае, соответствующем аналогу [1], для ΔН=15 морских миль величина импульса составила 7.5 м/с.
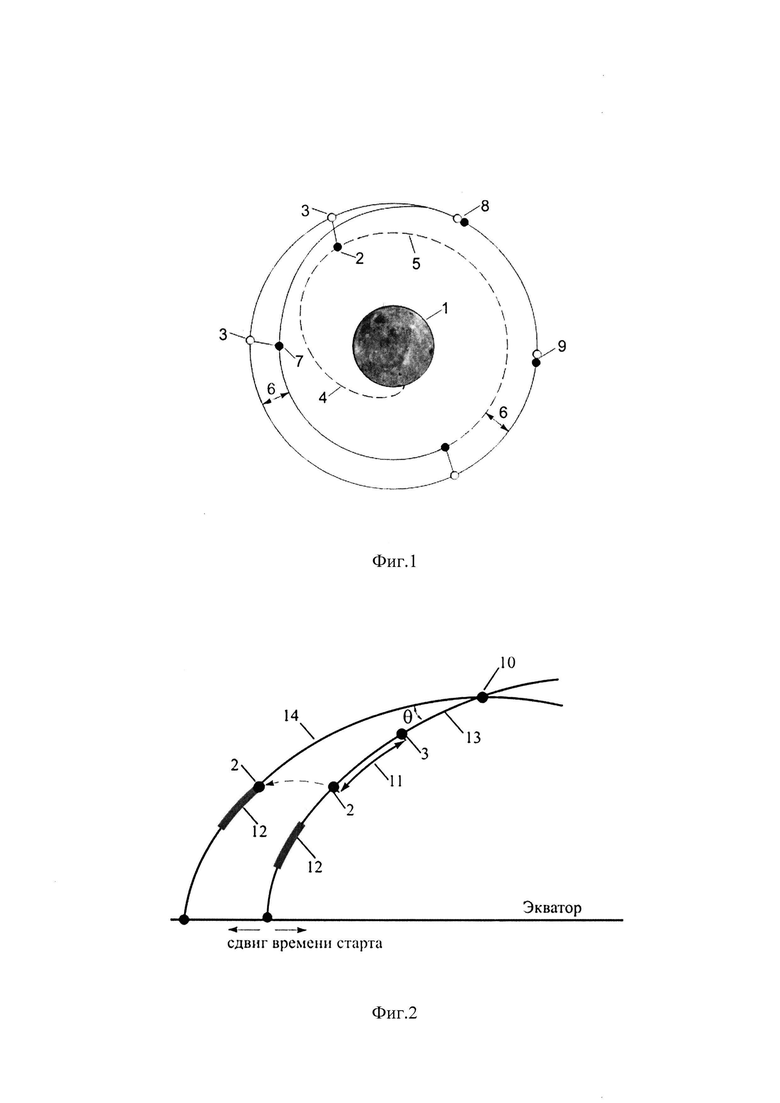
На фиг. 1 приведена баллистическая схема, используемая в аналоге, где: 1 - Луна, 2 - КО, 3 - ДКО, 4 - орбита КО после выведения, 5 - точка приложения импульса для перехода КО на промежуточную коэллиптическую орбиту, 6 - разница по высоте ΔН, 7 - точка приложения импульса для перехода на орбиту ДКО, 8 - точка начала торможения, 9 - точка, в которой завершается стыковка КО и ДКО.
Недостатком этого способа является необходимость выведения КО на орбиту с высотой апоцентра близкой к высоте орбиты ДКО. Если в качестве ДКО рассматривать орбитальную станцию (ОС) с высотой орбиты, существенно превосходящей (на 200 км) высоту орбиты выведения современных транспортных кораблей, то полет РН будет сопровождаться значительными потерями в выводимой массе КО.
Известен способ управления движением активного КО при сближении с пассивным ДКО, например ОС [3. Муртазин Р.Ф. Способ управления движением космическим объектом при сближении с другим космическим объектом. Патент RU №2657704 от 14.06.2018], выбранный в качестве прототипа, который обеспечивает сближение и стыковку за два витка. Такой способ включает выведение КО на орбиту, плоскость которой пересекает орбитальную плоскость ДКО под углом θ, но с заданным рассогласованием по аргументу широты ΔФ, после чего к КО прикладывают импульсы сближения для стыковки с ДКО. Рассогласование плоскостей орбит КО и ДКО ликвидируют в окрестности точки их пересечения с помощью первого импульса сближения, характеристики которого определяют по номинальным параметрам орбиты выведения. Затем с использованием бортовых измерений относительного положения КО и ДКО проводят расчет двухимпульсного маневра для перехода КО в окрестность ДКО, где сближение завершается автоматической стыковкой. Срочное выполнение первого импульса сближения, определенного по предстартовым расчетам, позволяет сократить длительность сближения до двух витков.
Недостатком этого способа является необходимость выполнения больших импульсов на заключительном этапе полета. В случае срыва автоматического режима завершить сближение в ручном режиме будет затруднительно.
Техническим результатом изобретения является сокращение длительности сближения КО с ДКО и повышение надежности и безопасности сближения без использования средств измерения относительного положения КО и ДКО.
Технический результат достигается благодаря тому, что в способе управления движением КО при сближении с ДКО, включающем выведение КО на опорную орбиту с отклонением от плоскости орбиты ДКО по долготе восходящего узла орбиты на величину ΔλВУ и по наклонению на величину Δi, но с заданным рассогласованием по аргументу широты ΔФ, и приложение к КО импульсов сближения для стыковки с ДКО, в отличие от известного, после выведения КО на опорную орбиту осуществляют его переход на промежуточную орбиту, компланарную и коэллиптическую по отношению к орбите ДКО с разницей по высоте на величину ΔН, которую определяют с учетом фактического значения ΔФ, при этом переход осуществляют путем приложения импульсов ΔVi, где i - 1, 2,…, характеристики которых определяют по номинальным параметрам опорной орбиты выведения КО, после чего в окрестности точки, в которой ДКО по отношению к КО находится под заданным углом α к местному горизонту, к КО прикладывают импульс ΔVПЕР, направленный вдоль вектора скорости КО, величину которого определяют по фактическому значению ΔН, для перехода КО на орбиту встречи с ДКО, а затем стыкуют КО с ДКО.
Описываемый способ управления движением позволяет провести сближение КО с ДКО менее чем за два витка, а при отсутствии измерений относительного положения КО и ДКО исполнение импульса сближения удобно реализовать в ручном режиме по визуальным наблюдениям ДКО.
Переход с опорной орбиты на промежуточную коэллиптическую орбиту потребует выполнения двухимпульсного маневра сближения протяженностью полвитка. За время нахождения КО на промежуточной коэллиптической орбите формируется окончательное согласование по аргументу широты между КО и ДКО. Последующий переход с коэллиптической орбиты для встречи с ДКО потребует выполнения еще одного импульса, направленного вдоль вектора скорости КО, и перелета в окрестность ДКО в течение полвитка. При этом величина импульса, необходимого для перехода в окрестность ДКО, зависит от фактического значения ΔН, а момент приложения этого импульса определяют по визуальным наблюдениям ДКО.
Технический результат в предлагаемом способе управления достигается за счет того, что с помощью квазикомпланарного выведения КО и последующего перехода на орбиту, коэллиптическую орбите ДКО с разницей по высоте ΔН, обеспечиваются условия для быстрого сближения КО с ДКО. Окончательный переход на орбиту ДКО с коэллиптической орбиты обеспечивает удобство выполнения ручного сближения по визуальным наблюдениям ДКО в случае срыва автоматического режима или при отсутствии возможности измерения взаимного положения КО и ДКО.
Сущность изобретения поясняется на фиг. 1÷5, где:
на фиг. 1 приведена баллистическая схема аналога с использованием промежуточной коэллиптической орбиты, с которой выполнялся заключительный переход к ДКО,
на фиг. 2 приведена схема выведения, используемая в предлагаемом способе управления с кавазикомпланарным выведением КО на опорную орбиту, которая обеспечивает рассогласование плоскостей орбит на угол θ,
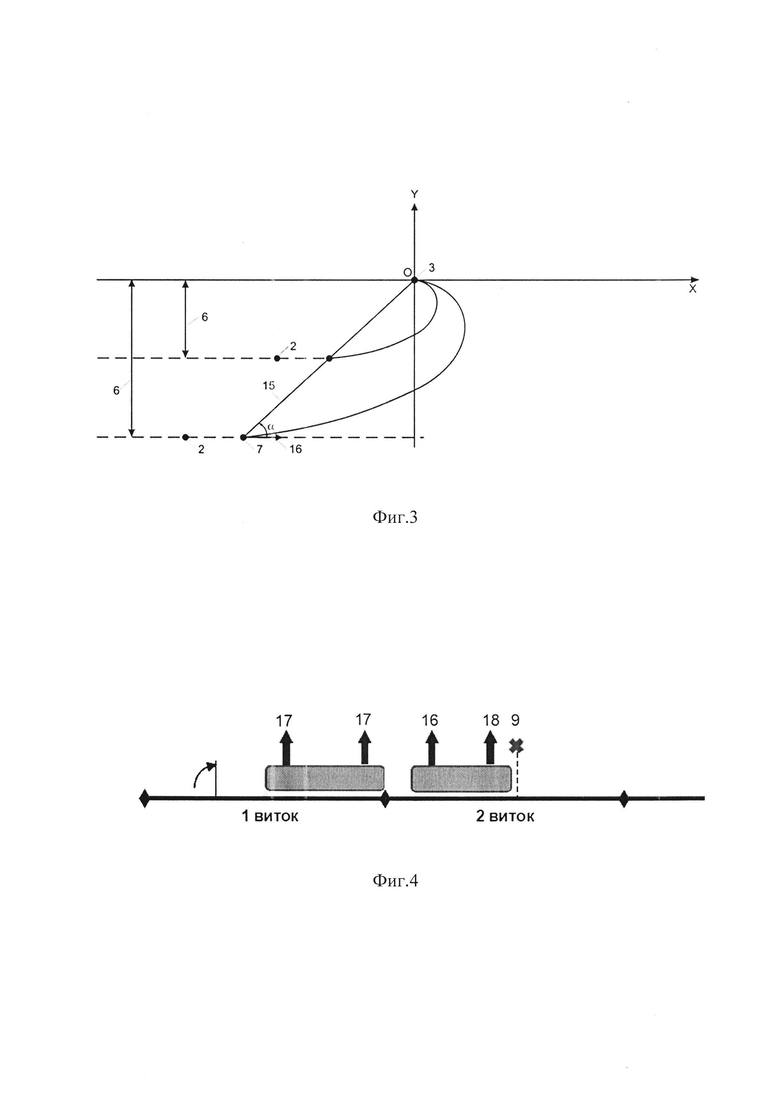
на фиг. 3 представлена схема перехода КО с промежуточной коэллиптической орбиты на орбиту ДКО,
на фиг. 4 показана циклограмма предлагаемого способа управления КО при выполнении сближения с ДКО,
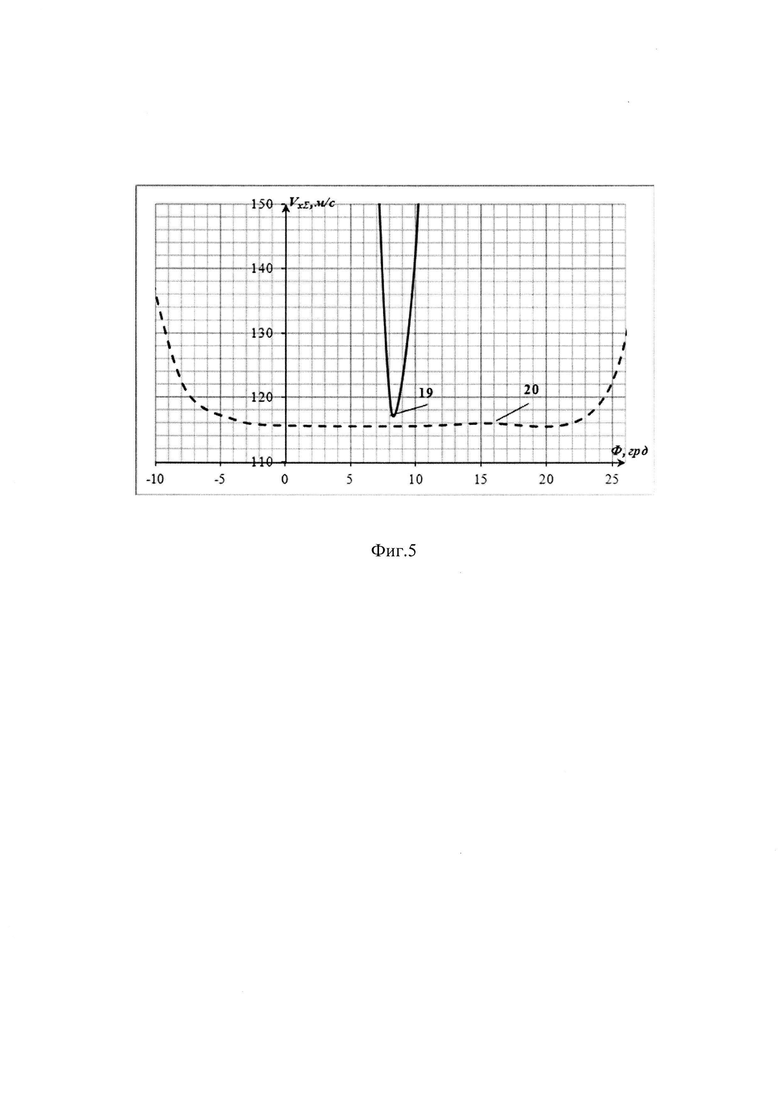
на фиг .5 представлены графики затрат характеристической скорости КО на сближение с ДКО в зависимости от начального рассогласования по аргументу широты ΔФ между объектами и с разницей по высоте ΔН=5 км.
На этих фиг. отмечены следующие позиции:
1 - Луна, 2 - КО, 3 - ДКО, 4 - опорная орбита КО после выведения, 5 -промежуточная коэллиптическая орбита, 6 - разница по высоте ΔН, 7 - точка приложения импульса для перехода на орбиту ДКО, 8 - точка начала торможения, 9 - точка, в которой завершается стыковка КО и ДКО, 10 - точка пересечения плоскостей орбит КО и ДКО под углом θ, в окрестности которой выполняется импульс, ликвидирующий рассогласование плоскостей орбит, 11 - начальное рассогласование по аргументу широты ΔФ между КО и ДКО в момент выведения КО, 12 - диапазон начальных положений КО, позволяющий реализовать сближение с ДКО с допустимыми затратами характеристической скорости, 13 -трасса КО при компланарном выведении на орбиту, 14 - трасса КО при квазикомпланарном выведении на орбиту, 15 - линия Гомана, 16 - импульс перехода КО с промежуточной коэллиптической орбиты на орбиту встречи с ДКО, 17 - импульсы перехода КО на промежуточную коэллиптическую орбиту, 18 - заключительные импульсы торможения КО, 19 - диапазон начальных значений рассогласования по аргументу широты ΔФ, позволяющий провести сближение в компланарной постановке, 20 - диапазон начальных значений рассогласования по аргументу широты ΔФ, позволяющий провести сближение в квазикомпланарной постановке.
Рассмотрим предлагаемый способ на примере. Пусть в качестве ДКО рассматривается ОС, к которой должен пристыковаться КО, выводимый на опорную орбиту с помощью РН. Для выполнения сближения и стыковки в течение двух витков в случае выведения КО в плоскость орбиты ДКО начальное рассогласование по аргументу широты ΔФ должно находиться в узком допустимом диапазоне шириной 6° [4. Р. Муртазин «Двухвитковая схема сближения космического корабля «Союз» с международной космической станцией», ж. Космонавтика и Ракетостроение ЦНИИМаш, 2017 (1) №94 с. 30-37]. Чтобы обеспечить попадание в этот оптимальный диапазон потребуется проведение маневров ОС для формирования необходимых параметров орбиты, что приведет к расходу большого количества топлива.
Для расширения оптимального диапазона используют квазикомпланарное выведение, описанное в [3]. Время запуска КО смещают таким образом, чтобы начальное рассогласование с ДКО по аргументу широты ΔФ оказалось в допустимом диапазоне, а возникающий при этом угол рассогласования орбитальных плоскостей КО и ДКО θ частично ликвидируют за счет изменения азимута выведения РН (фиг. 2). После выведения КО на опорную орбиту выполняют его переход на промежуточную коэллиптическую орбиту с помощью импульсов, характеристики которых определены по предстартовым расчетам без проведения измерений параметров орбиты КО.
Дополнительное расширение условий по начальному рассогласованию по аргументу широты ΔФ можно получить варьированием разницей по высоте ΔН между орбитой ДКО и коэллиптической орбитой, а также временем нахождения на этой орбите. Заключительный участок сближения с промежуточной коэллиптической орбиты представляет собой классический гомановский переход с импульсом, направленным вдоль вектора скорости КО. Точка приложения этого импульса определяется пересечением КО т.н. линии Гомана, вдоль которой ДКО можно визуально наблюдать под углом ~22° над местным горизонтом (для околоземной орбиты). Переход в точку встречи с ДКО при выполнении такого импульса в точке пересечения линии Гомана займет полвитка.
На фиг. 3 представлена схема перехода КО с промежуточной коэллиптической орбиты на орбиту ДКО. Для наглядности представлены два случая, отличающихся разницей по высоте ΔН 6. При нахождении КО на коэллиптической орбите его траектория в орбитальной системе координат (ОСК) относительно ДКО представляет собой прямую, параллельную оси X ОСК. Находясь на коэллиптической орбите, КО движется по этой траектории с постоянной относительной скоростью где ω - угловая скорость вращения ДКО по орбите, ΔН - разница высот орбит [2]. Линия Гомана позволяет определить точку приложения импульса для гомановского перехода КО в окрестность ДКО. Эта линия проходит через начало координат ОСК (ДКО) и пересекает относительную траекторию КО под углом α к местному горизонту. Значение угла α является постоянной величиной для данного центрального притягивающего тела и не зависит от разницы высот ΔН между коэллиптическими орбитами. Для окололунной орбиты значение угла α составляет ~26.5°, а для околоземной ~23°. Импульс в точке пересечения линии Гомана будет направлен вдоль вектора абсолютной скорости КО, а величина этого импульса пропорциональна разнице высот ΔН (1). В аналоге величина импульса при переходе КО в окрестность ДКО на окололунной орбите с ΔН=15 морских миль составила 7.5 м/с.
где ω - угловая скорость вращения ДКО по орбите, ΔН - разница высот орбит [2]. Линия Гомана позволяет определить точку приложения импульса для гомановского перехода КО в окрестность ДКО. Эта линия проходит через начало координат ОСК (ДКО) и пересекает относительную траекторию КО под углом α к местному горизонту. Значение угла α является постоянной величиной для данного центрального притягивающего тела и не зависит от разницы высот ΔН между коэллиптическими орбитами. Для окололунной орбиты значение угла α составляет ~26.5°, а для околоземной ~23°. Импульс в точке пересечения линии Гомана будет направлен вдоль вектора абсолютной скорости КО, а величина этого импульса пропорциональна разнице высот ΔН (1). В аналоге величина импульса при переходе КО в окрестность ДКО на окололунной орбите с ΔН=15 морских миль составила 7.5 м/с.
Рассмотрим циклограмму предлагаемого способа управления КО при выполнении сближения с ДКО (фиг. 4). После выведения КО 2 на опорную орбиту его переводят на промежуточную коэллиптическую орбиту с помощью двух импульсов 17. При достижении КО точки пересечения с линией Гомана на коэллиптической орбите к нему прикладывают переходный импульс 16, а примерно через полвитка в окрестности ДКО выполняют заключительные импульсы торможения 18 и проводят стыковку 9 КО с ДКО.
Рассмотрим пример. Для сближения по одновитковой схеме при выведении КО в плоскость орбиты ДКО ширина допустимого диапазона начальных рассогласований по аргументу широты ΔФ составляет около 1° (фиг. 5). При отсутствии возможности обеспечить заданное рассогласование ΔФ на момент выведения КО в плоскость ДКО его можно сформировать за счет изменения времени старта. В этом случае появляется рассогласование плоскостей орбит КО и ДКО. Для минимизации затрат характеристической скорости КО на совмещение плоскостей орбит необходимо за счет изменения азимута стрельбы РН уменьшить межорбитальный угол θ. После изменения азимута плоскости орбит КО и ДКО будут отличаться по долготе восходящего узла на величину ΔλВУ и по наклонению на величину Δi. Оставшееся после изменения азимута РН незначительное рассогласование плоскостей орбит КО и ДКО ликвидируется за счет небольших боковых составляющих импульсов сближения. При таком подходе диапазон начальных рассогласований по аргументу широты ΔФ можно расширить до ~30° (фиг. 5).
На графиках затрат характеристической скорости КО при сближении с ДКО (фиг. 5) сплошной линией обозначены затраты, соответствующие выведению КО в плоскость орбиты ДКО, при этом рассогласование плоскостей орбит отсутствует. Допустимый диапазон начального рассогласования по аргументу широты ΔФ между КО и ДКО 19 достаточно узкий и не превышает 1°. Изменение азимута стрельбы РН при выведении КО позволит достичь допустимых затрат характеристической скорости КО в широком диапазоне фазовых углов -30° (штриховая линия 20). Таким образом, представленный способ позволяет обеспечить условия для сближения за один виток с минимальными затратами.
Следует добавить, что в [4] заключительный участок автономного сближения имеет длительность более одного витка. Алгоритм автономного участка предусматривает сближение на конечном этапе с относительной скоростью ~10 м/с (прицельная скорость), что требует выполнения достаточно больших (не менее 5 м/с) тормозных импульсов с пространственной ориентацией [2]. Наличие пространственных составляющих и поиск точки приложения импульсов требуют автоматизации расчетов и не позволяют выполнить сближение в ручном режиме. Переход на орбиту встречи с коэллиптической орбиты позволит выполнить сближение в ручном режиме без использования сложных расчетов и с меньшей прицельной скоростью, повышая тем самым безопасность стыковки.
Таким образом, переход с опорной орбиты выведения на промежуточную коэллиптическую орбиту с помощью двухимпульсного маневра займет около полвитка, а переход с коэллиптической орбиты на орбиту стыковки с ДКО с помощью импульса перехода займет еще полвитка. Следовательно, минимальная продолжительность полета КО от выведения до перехода на орбиту ДКО составит около одного витка.
Изобретение относится к космической технике, а более конкретно к сближению космических объектов. Способ управления движением космического объекта (КО) при сближении с другим космическим объектом (ДКО) включает выведение КО на опорную орбиту с отклонением от плоскости орбиты ДКО по долготе восходящего узла орбиты на величину ΔλВУ и по наклонению на величину Δi, но с заданным рассогласованием по аргументу широты ΔФ, и приложение к КО импульсов сближения для стыковки с ДКО. При этом после выведения КО на опорную орбиту осуществляют его переход на промежуточную орбиту, компланарную и коэллиптическую по отношению к орбите ДКО с разницей по высоте на величину ΔН, которую определяют с учетом фактического значения ΔФ. Переход осуществляют путем приложения импульсов ΔVi. Далее к КО прикладывают импульс ΔVПЕР, направленный вдоль вектора скорости КО, для перехода космического объекта на орбиту встречи с другим космическим объектом, а затем стыкуют КО с ДКО. Достигается сокращение количества витков перед стыковкой. 5 ил.
Способ управления движением космического объекта при сближении с другим космическим объектом, включающий выведение космического объекта на опорную орбиту с отклонением от плоскости орбиты другого космического объекта по долготе восходящего узла орбиты на величину ΔλВУ и по наклонению на величину Δi, но с заданным рассогласованием по аргументу широты ΔФ, и приложение к космическому объекту импульсов сближения для стыковки с другим космическим объектом, отличающийся тем, что после выведения космического объекта на опорную орбиту осуществляют его переход на промежуточную орбиту, компланарную и коэллиптическую по отношению к орбите другого космического объекта с разницей по высоте на величину ΔН, которую определяют с учетом фактического значения ΔФ, при этом переход осуществляют путем приложения импульсов ΔVi, где i - 1, 2,…, характеристики которых определяют по номинальным параметрам опорной орбиты выведения космического объекта, после чего в окрестности точки, в которой другой космический объект по отношению к космическому объекту находится под заданным углом α к местному горизонту, к космическому объекту прикладывают импульс ΔVПЕР, направленный вдоль вектора скорости космического объекта, величину которого определяют по фактическому значению ΔН, для перехода космического объекта на орбиту встречи с другим космическим объектом, а затем стыкуют космический объект с другим космическим объектом.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С ДРУГИМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2017 |
|
RU2657704C1 |
| CN 109774973 B, 07.08.2020 | |||
| US 5242135 A1, 07.09.1993 | |||
| US 4884770 A1, 05.12.1989 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2012 |
|
RU2490181C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2013 |
|
RU2542836C2 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ С ПОМОЩЬЮ ЭЛЕКТРОРЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2015 |
|
RU2619486C2 |

