Изобретение относится к способу управления не менее чем двумя грузоподъемными устройствами, в частности двумя подъемными кранами, как совместно перемещающими общий груз, так и работающими независимо друг от друга, каждое из которых снабжено электромотором для привода подъемного механизма, управляемым от единой для обоих кранов системой управления с общим пультом управления, причем не менее двух из грузоподъемных устройств управляемы через общую электрическую шину одним общим пультом при совместной работе грузоподъемных устройств с общим грузом.
Изобретение также относится к средствам управления одновременно не менее чем двумя грузоподъемными устройствами, в частности двумя подъемными кранами, работающими как совместно, так и независимо друг от друга, при условии наличия у каждого из указанных грузоподъемных устройств электромотора для привода грузоподъемного механизма, управляемого общей для обоих кранов системой управления посредством одного общего пульта.
В принципе, известно одновременное использование двух подъемных механизмов крана, работающих в тандеме при подъеме или опускании тяжелых или длинномерных грузов. В этом случае груз подвешен на двух грузонесущих средствах, каждое из которых опускается или поднимается под действием отдельного подъемного механизма. Самые различные причины могут вызвать отклонение груза от строго горизонтального положения. При этом, например, длинномерные грузы, которые, как правило, подвешивают на петлях тросов, могут соскользнуть в ту или иную сторону. Таких опасных ситуаций обязательно надо избегать. Обычно такими подъемными механизмами, работающими в тандеме, управляют одним пультом. Им же изменяют режим работы на тандемное управление или управление подъемными механизмами в по отдельности. Это создает недопустимо опасные ситуации. Кроме того, при изменениях в процессе работы тандема отсутствует обратная связь. Это означает, что оператор просто принимает на веру, что работа в тандемном режиме проходит нормально. С другой стороны, невозможно немедленное вмешательство оператора в работу тандема через общий пульт, который электрически связан с обоими подъемными механизмами. Это также ведет к возникновению опасных ситуаций.
Из патента Германии №3147158 известно управление тандемом из двух подъемных механизмов одним общим пультом. Изобретение направлено на предотвращение упомянутого выше перекоса длинномерных грузов. Для этого на обоих подъемных механизмах крана подвешена продольная штанга с датчиком положения. Датчик показывает горизонтальность продольной штанги. Если штанга отклоняется от горизонтали, что означает нарушение синхронности работы тандема подъемных механизмов, один из подъемных механизмов останавливают, а при помощи второго подъемного механизма приводят штангу в горизонтальное положение.
Далее, из европейского патента №1380533 известен цеховой мостовой кран, у которого привод крановой тележки, привод самого крана, подъемный механизм и пульт управления подключены к одной электрической шине, через которую они электрически связаны друг с другом. Через нее передают или принимают сигналы управления и аварийные сигналы.
В патенте Германии №9115537 на полезную модель описаны система управления одним подъемным краном и система управления двумя подъемными кранами, имеющими по одной крановой тележке. Во второй системе имеется двунаправленная обходная электрическая шина, к которой подсоединены пульты управления обоими подъемными кранами и обеими крановыми тележками. Возможность управления только одним подъемным краном из указанного тандема в патенте не описана.
Далее, в патентной заявке Германии №102006040782 A1 описано безопасное тандемное управление двумя подъемными кранами и управление этими кранами при их работе независимо друг от друга. Каждый из подъемных кранов имеет свою бортовую шину, с которой соединена система управления. При необходимости корректировки тандемного управления последнее отключают, проводят корректировку, а потом снова включают тандемный режим управления.
Задачей настоящего изобретения является создание безопасного управления совместной работой не менее двух грузоподъемных устройств, в частности подъемных кранов.
Поставленная задача достигается с помощью способа по п. 1 формулы изобретения и устройства для осуществления данного способа, описанного в п. 3 формулы изобретения. Предпочтительные варианты приведены в пп. 2 и 4-14 формулы изобретения.
Согласно изобретению разработан надежный и простой способ управления двумя и более грузоподъемными устройствами, в частности двумя подъемными кранами, как группой, так и по отдельности, при котором каждое из грузоподъемных устройств имеет электромотор, управляемый системой управления, связанной с пультом управления, при этом не менее чем двумя грузоподъемными устройствами управляют через общую шину посредством одного пульта управления, в котором при одновременном управлении всеми грузоподъемными устройствами один из пультов управления находится в рабочем состоянии, а другой из пультов управления - в нерабочем состоянии,
при этом для перехода в режим группового управления всеми грузоподъемными устройствами режим управления отдельно каждым из грузоподъемных устройств прекращают выключением из рабочего состояния всех пультов управления, кроме одного, который оставляют в рабочем состоянии и посредством которого осуществляют вхождение в режим группового управления всеми грузоподъемными устройствами и само управление этими грузоподъемными устройствами,
а для перехода в режим управления отдельно каждым из грузоподъемных устройств режим группового управления прекращают посредством упомянутого оставшегося в рабочем состоянии пульта управления, им же выбирают режим управления отдельно каждым из грузоподъемных устройств, и затем включают в рабочее состояние другой из пультов управления или другие пульты управления и вводят его/их в режим управления отдельно каждым из грузоподъемных устройств.
Предпочтительнее, если пультом управления, находящимся в рабочем состоянии в режиме группового управления грузоподъемными устройствами, оперируют в трех видах режимов управления: режим группового управления параллельно несколькими грузоподъемными устройствами, режим управления только первым из группы грузоподъемных устройств и режим управления только вторым из группы грузоподъемных устройств.
Кроме того, в соответствии с настоящим изобретением созданы средства управления не менее чем двумя грузоподъемными устройствами, в частности подъемными кранами, в режиме группового управления и в режиме управления отдельно каждым из группы кранов, причем каждое из грузоподъемных устройств имеет мотор привода грузоподъемных механизмов, содержащие системы управления, связанные с указанными моторами, пульты управления и общую шину для приема/передачи управляющих сигналов, установленную с возможностью одновременного управления указанными грузоподъемными устройствами через пульты управления, в режиме группового управления вышеназванными грузоподъемными устройствами только один из пультов управления находится в рабочем состоянии, при этом для обеспечения возможности перехода названных средств управления из режима отдельного управления каждым из грузоподъемных устройств в режим группового управления ими все пульты управления находятся в нерабочем состоянии, кроме одного, остающегося в рабочем состоянии с возможностью переключения средств управления в режим группового управления грузоподъемными устройствами и управления ими в этом режиме, а для возможности перехода в режим отдельного управления каждым из грузоподъемных устройств данный пульт управления устроен с возможностью отключения режима группового управления, после чего остальные пульты управления имеют возможность войти в рабочее состояние с целью управления отдельно каждым из группы грузоподъемных устройств.
Средства управления также снабжены системой контроля за режимом группового управления, за сменой режима управления между групповым управлением и управлением отдельным краном, за процессом вхождения в нужный режим управления и выхода из него, причем указанная система контроля может содержать логические схемы управления. Благодаря такому надежному двухступенчатому переключению с одного режима управления на другой нет необходимости в специальных дополнительных контрольных переключателях при групповом режиме управления. Необходимость проводить переключение с одного режима управления на другой в два приема (две стадии) обеспечивает высокий уровень надежности системы управления. Выход из того или иного режима управления инициируется одним пультом управления, системы управления распознают эти сигналы и останавливают свою работу в ожидании управляющих сигналов на вхождение в другой режим управления от другого пульта управления. Только после соответствующих проверок и обменов сигналами между системами управления происходит смена одного режима управления другим.
В предпочтительном варианте пульт управления, находящийся в рабочем состоянии в режиме группового управления грузоподъемными устройствами, устроен с возможностью управления ими в трех режимах: в групповом, когда он способен параллельно управлять группой грузоподъемных устройств, в первом обычном режиме, когда он способен управлять только первым из грузоподъемных устройств, и во втором обычном режиме, когда он способен управлять вторым из грузоподъемных устройств.
В более предпочтительном варианте общая шина разделена на части, связанные электропроводами с грузоподъемными устройствами, и на часть, беспроводно связанную с названными грузоподъемными устройствами.
Относительно архитектуры шины, лучше, если системы управления и пульты управления соединены с общей шиной.
В наиболее оптимальном варианте не менее двух грузоподъемных устройств выполнены в виде подъемных кранов, которые, кроме моторов грузоподъемных механизмов, дополнительно снабжены моторами привода подъемных кранов и моторами привода крановых тележек подъемных кранов, при этом системы управления устроены с возможностью управления моторами привода подъемных кранов и моторами привода крановых тележек подъемных кранов, а системы управления подъемными кранами устроены с возможностью управления моторами грузоподъемных механизмов подъемных кранов, причем системы управления подъемными кранами подключены к общей шине.
В результате, система управления подъемными кранами выполнена децентрализованной и разделена на модули управления кранами и крановыми тележками, каждый из которых в свою очередь выполняет соответствующие команды пультов управления по переходу в групповой или в одинарный режим управления.
Особенно безопасное и простое управление достигается, если пульты управления, переключающие режимы управления, находятся под контролем вышеупомянутых систем управления. В этом случае названные системы управления могут содержать соответствующие координирующие логические схемы.
Изобретение поясняется более подробно в приведенном ниже описании со ссылкой на чертеж, на котором схематически изображены два мостовых крана, электрически соединенных друг с другом для совместной работы в тандеме.
На чертеже схематически обозначены первый мостовой кран 1a и второй мостовой кран 1b, установленные на рельсах (не показаны) с возможностью перемещения по ним. Как известно, мостовой кран содержит горизонтальную крановую балку, на которой установлена крановая тележка с возможностью перемещения вдоль этой балки. На крановой тележке установлен грузоподъемный механизм. Первый мостовой кран 1a снабжен первой системой 2а управления им самим, а также - первой системой управления крановой тележкой. Второй мостовой кран 1b соответственно снабжен второй системой 2b управления им самим, и второй системой 3b управления его крановой тележкой. Первая и вторая системы 2а, 2b также предназначены и для управления приводными моторами 4а, 4b мостовых кранов 1a, 1b соответственно. А первая и вторая системы 3a,3b управления крановыми тележками предназначены также для управления первым и вторым приводными моторами 5а, 5b указанных тележек и моторами 6а, 6b грузоподъемных механизмов на упомянутых крановых тележках. Грузоподъемные механизмы (не показаны), соединенные с моторами 6а, 6b, представляют собой лебедки, тросовые или цепные. Возможны и сочетания цепных и тросовых лебедок. Все упомянутые моторы 4а, 4b, 5а, 5b, 6a, 6b - электромоторы.
Для обеспечения возможности передать и принять управляющие и предупреждающие сигналы каждая из систем управления 2а, 2b и систем 3a, 3b управления крановыми тележками подсоединена к общей шине 7 посредством соединительного модуля (не показан). Общая шина 7 предпочтительнее управляема протоколом CAN, который является стандартом ISO (ISO 11898) в области последовательной передачи данных. Далее, общая шина 7 составлена из первой части 7а, подключенной к источнику электроэнергии первого мостового крана 1a, второй части 7b, подключенной к источнику электроэнергии второго мостового крана 1b, и третьей, не подключенной к источнику электроэнергии, части 7c, соединяющей части 7a, 7b. При этом первый соединительный модуль 8а соединен с первой частью 7а, а второй соединительный модуль 8b - со второй частью 7b. Указанные модули 8а, 8b преобразуют сигналы на первой и второй частей 7а, 7b общей шины 7 в беспроводные сигналы, которые передатчики/приемники передают между модулями 8а, 8b. Благодаря этому системы 2а, 2b управления кранами и системы 3a ,3b управления крановыми тележками оказываются подключенными к общей шине 7. К ней же, прямо или косвенно, подключены пульты управления 9а, 9b. Беспроводную шину 7с предпочтительнее выполнить в радиоварианте. Возможно также выполнение ее инфракрасной.
Системы управления 2а, 2b мостовыми кранами и системы управления 3a, 3b крановыми тележками снабжены известными переключателями, сенсорами, логическими модулями, соединительными модулями (не показаны). Соединительные модули могут быть частями логических модулей.
Далее, первый беспроводный пульт управления 9а размещен на первом мостовом кране 1a, а второй беспроводный пульт управления 9b размещен на втором мостовом кране 1b. Первый пульт управления 9а связан первыми беспроводными соединительными средствами 10а с первым двунаправленным модулем 11а переключения соединения. Второй пульт управления 9b связан вторыми беспроводными соединительными средствами 10b со вторым двунаправленным модулем 11b. Оба модуля 11a, 11b соединены с общей шиной 7, как было указано выше. Пульты управления 9а, 9b имеют множество кнопок для управления направлением движения и скоростью работы приводных моторов 4а, 4b мостовых кранов, приводных моторов 5а, 5b крановых тележек и моторов 6a, 6b грузоподъемных механизмов, если таковые имеются.
Дополнительно к беспроводным пультам управления 9а, 9b и к модулям 11a, 11b могут быть добавлены проводные пульты управления 9c, показанные на чертеже пунктирными линиями. Пульты 9c подвешены на электропроводах, подсоединенных к общей шине 7.
Посредством пультов управления 9а, 9b можно управлять мостовыми кранами 1a, 1b индивидуально и независимо друг от друга, т.е. в режиме обычного управления, когда оба пульта управления 9а, 9b постоянно находятся в рабочем состоянии.
В качестве опции можно одним из пультов 9а или 9b управлять обоими мостовыми кранами 1a, 1b как по отдельности, так и в групповом режиме. При групповом управлении один из пультов 9а, 9b находится в нерабочем состоянии и на все входящие сигналы не реагирует. В противоположность этому, другой пульт, находящийся в рабочем состоянии, направляет управляющие сигналы на один или оба мостовых крана. При этом возможны три режима управления: 1-й - управление группой кранов, 2-й - управление только первым краном, 3-й - управление только вторым краном. В режиме 1-го - группового - управления пульт 9а (или 9b) взаимодействует с обоими мостовыми кранами 1a, 1b, т.е. его управляющие сигналы поступают параллельно на моторы 4а, 4b, 5а, 5b, 6а и 6b. Поэтому моторы 4а, 4b, 5а, 5b, 6а и 6b первого мостового крана 1a работают синхронно аналогичным моторам второго мостового крана - 1b. При таком режиме управления группой мостовых кранов 1a, 1b длинномерные и тяжелые грузы можно поднимать и перемещать единым усилием обоих мостовых кранов, управляемых одним пультом 9а или 9b. При этом может возникнуть ситуация, когда параллельная работа моторов 4a, 4b, 5a, 5b, 6а, 6b должна выполняться последовательно с короткими или длительными промежутками между операциями. Управление такими процессами тоже можно выполнять одним пультом 9а. Такое возможно, когда при одновременном перемещении обоих мостовых кранов 1a, 1b необходимо подкорректировать положение груза во избежание его перекоса. Корректировка положения мостовых кранов 1a, 1b относительно друг друга, в частности крановых балок и/или крановых тележек, также облегчена. Для этого надо просто перейти от режима группового управления в режим отдельного управления тем или другим краном. В одном случае пульт 9а или 9b продолжает находиться в рабочем состояния, а в другом - пульты 9b, 9а находятся в нерабочем состоянии. 2-й режим: только первый мостовой кран 1a получает управляющие сигналы и находится в рабочем состоянии, а второй мостовой кран 1b не получает управляющих сигналов и находится в нерабочем состоянии. В этом случае первый мостовой кран 1a может перемещаться относительно второго мостового крана 1b. 3-й режим управления аналогичен 2-му с той лишь разницей, что первый мостовой кран 1a находится в нерабочем, а второй мостовой кран 1b - в рабочем состоянии.
Для обеспечения возможности перехода от обычного режима управления одним краном к режиму группового управления каждый из пультов управления (9а, 9b) снабжен кнопкой 12а входа в нужный режим управления и кнопкой 12b выхода из этого режима управления. Вместо указанных кнопок 12а, 12b, вхождение/выхождение в нужный режим управления можно осуществлять заранее заданной очередностью нажатия обычных кнопок на пульте управления.
Нажатием кнопки 12b первого или второго пульта управления 9а, 9b на общую шину 7, на системы управления 2а, 2b и на системы управления 3a, 3b подают сигнал об окончании работы в обычном режиме и вхождении в режим группового управления, после чего пульт управления 9а, 9b переводят из рабочего в нерабочее состояние.
Предпочтительнее дополнительно к кнопке 12b выхода из выбранного режима управления предусмотреть и «аварийную/стоп» кнопку или установить определенный порядок нажатия обычных кнопок на пульте управления для выхода из выбранного режима управления.
Затем нажатием кнопки 12а на другом пульте управления 9b, 9а посылают управляющий сигнал вхождения в другой режим управления через общую шину 7 на системы управления 2а, 2b и 3a, 3b, которые начинают принимать управляющие сигналы указанного пульта 9b, 9а.
При выходе одного из пультов 9а, 9b из режима управления одним мостовым краном и вхождении другого пульта 9b, 9а в режим группового управления всеми мостовыми кранами, системы управления 2а, 2b и 3a, 3b получают информацию о том, что режим управления одним мостовым краном завершен и начался режим управления группой мостовых кранов, и поэтому данные системы управления начинают реагировать на управляющие/аварийные сигналы второго из пультов 9b, 9а. Поскольку групповое управление воспринимается обоими мостовыми кранами 1a, 1b так как и было запрограммировано, то оба указанных мостовых крана координируют свои перемещения в зависимости от пространственного положения совместно несомого груза. Благодаря возможности управлять одним отдельным мостовым краном в режиме группового управления мостовыми кранами 1a, 1b, можно корректировать положение одного мостового крана относительно другого мостового крана. Возможно также обеспечить работу и вторым пультом управления 9b, 9а в процессе группового управления обоими мостовыми кранами.
При одновременном управлении группой мостовых кранов системы управления 2а, 2b мостовыми кранами и системы управления 3a, 3b крановыми тележками подчиняются управляющим сигналам одного из двух пультов управления 9а, 9b, находящегося в активном состоянии, поэтому приводные моторы 4а, 4b мостовых кранов, 5а, 5b крановых тележек и 6а, 6b грузоподъемных механизмов работают синхронно, следовательно, мостовые краны, крановые тележки и грузоподъемные механизмы тоже работают синхронно и, как следствие, оба мостовых крана 1a, 1b поднимают/опускают грузы тоже синхронно.
Для завершения режима группового управления мостовыми кранами активируют кнопку 12b на пульте управления 9а нажатием на нее. Соответствующий управляющий сигнал поступает через общую шину 7 на системы 2а, 2b и 3a, 3b управления крановыми тележками. Затем, если используют пульт управления 9а, 9b, который до этого был в нерабочем состоянии, дезактивируют «аварийную/стоп» кнопку и активируют кнопку 12а входа в требуемый режим управления. При этом соответствующий управляющий сигнал через шину 7 поступает на системы управления 2а, 2b мостовыми кранами и системы управления 3a, 3b крановыми тележками. После этого оба пульта управления 9а, 9b вводят в режим управления одним отдельным краном. Теперь обоими кранами 1a, 1b управляют по отдельности, но они при этом сообщаются друг с другом через общую шину 7, что делает возможным впоследствии переход к групповому управлению ими.
Системы управления 2а, 2b и 3a, 3b являются взаимозаменяемыми с целью обеспечения возможности слежения за очередностью поступающих от пультов управления 9а, 9b управляющих сигналов перехода из одного режима управления в другой и отмены этих сигналов, распознавания их и проверки надежности их выполнения. Только заранее заданная последовательность сигналов выхода из режима управления/входа в режим управления воспринимается указанными системами управления, которые, кроме того, следят за последовательностями поступления отмены управляющих сигналов и сигналов хождения в определенный режим управления, что также повышает безопасность смены режима работы кранов и крановых тележек. Только после полного завершения выхода из предыдущей стадии процесса управления системы управления кранами и тележками реагируют на управляющие сигналы вхождения в иной режим управления. Этим достигается высокий уровень безопасности работы мостовых кранов, когда системы управления 2а, 2b и 3a, 3b имеют возможность распознавать правильность последовательностей входа в определенный режим управления и выхода из него.
Единая система управления мостовыми кранами 1a, 1b выполнена децентрализованной и разделена на системы управления 2а, 2b (мостовыми кранами) и 3a, 3b (крановыми тележками), каждый из которых реагирует только в свою очередь на соответствующие команды с пультов 9а, 9b для переключения с одинарного режима управления на групповой. Таким образом, описанные системы управления 2а, 2b мостовыми кранами и 3a, 3b крановыми тележками используют для переключения в разные режимы управления.
Несмотря на то, что настоящее изобретение проиллюстрировано примером управления двумя мостовыми кранами 1a, 1b, оно может быть легко применено для управления большим количеством мостовых кранов 1a, 1b.
Перечень позиций на чертеже и в описании
1a первый мостовой кран
1b второй мостовой кран
2а система управления первым мостовым краном
2b система управления вторым мостовым краном
3a система управления первой крановой тележкой
3b система управления второй крановой тележкой
4а приводной мотор первого мостового крана
4b приводной мотор второго мостового крана
5а приводной мотор первой крановой тележки
5b приводной мотор второй крановой тележки
6а мотор первого подъемного механизма
6b мотор второго подъемного механизма
7 общая шина
7а первая часть общей шины 7
7b вторая часть общей шины 7
7c беспроводная шина
8a первый соединительный модуль
8b второй соединительный модуль
9a первый беспроводный пульт управления
9b второй беспроводный пульт управления
9c альтернативный пульт управления с проводом
10а первые беспроводные соединительные средства
10b вторые беспроводные соединительные средства
11a первый двунаправленный модуль переключения соединений
11b второй двунаправленный модуль переключения соединений
12а кнопка входа в режим управления
12b кнопка выхода из режима управления
Управляют двумя и более грузоподъемными устройствами, в частности двумя подъемными кранами (1a, 1b), как группой, так и по отдельности. Каждое из грузоподъемных устройств содержит электромотор (6а, 6b), управляемый системой управления (3а, 3b), связанной с пультом управления (9а, 9b). Не менее чем двумя грузоподъемными устройствами управляют через общую электрическую шину (7) посредством одного пульта управления (9а, 9b). При одновременном управлении всеми грузоподъемными устройствами один из пультов управления (9а, 9b) находится в рабочем состоянии, а другой из пультов управления (9а, 9b) - в нерабочем состоянии. Для перехода в режим группового управления всеми грузоподъемными устройствами режим управления отдельно каждым из грузоподъемных устройств прекращают выключением из рабочего состояния всех пультов управления (9а, 9b), кроме одного, который оставляют в рабочем состоянии и посредством которого осуществляют вхождение в режим группового управления всеми грузоподъемными устройствами и само управление этими грузоподъемными устройствами, а для перехода в режим управления отдельно каждым из грузоподъемных устройств режим группового управления прекращают посредством упомянутого оставшегося в рабочем состоянии пульта управления (9а, 9b), им же выбирают режим управления отдельно каждым из грузоподъемных устройств, и затем включают в рабочее состояние другой из пультов управления (9а, 9b) или другие пульты управления и вводят его/их в режим управления отдельно каждым из грузоподъемных устройств. Достигается создание безопасного управления совместной работой не менее двух грузоподъемных устройств, в частности подъемных кранов. 2 н. и 11 з.п ф-лы, 1 ил.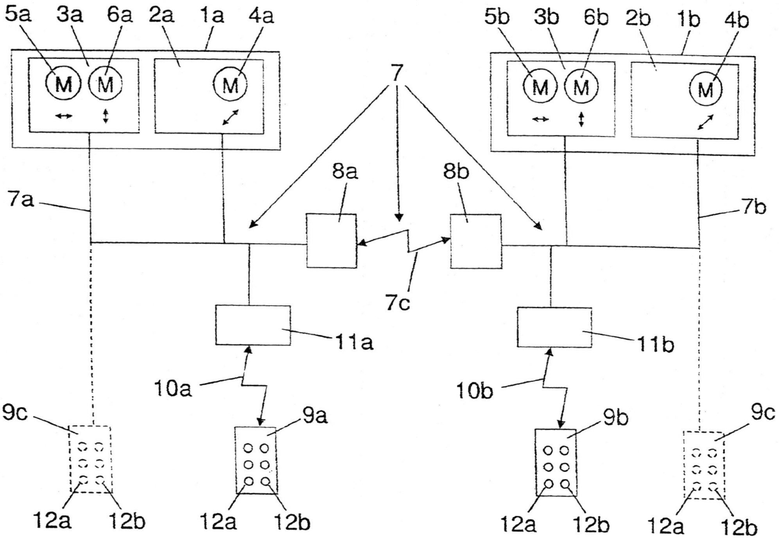
1. Способ управления двумя и более грузоподъемными устройствами, в частности двумя подъемными кранами (1a, 1b), как группой, так и по отдельности, при котором каждое из грузоподъемных устройств имеет электромотор (6а, 6b), управляемый системой управления (3а, 3b), связанной с пультом управления (9а, 9b), при этом не менее чем двумя грузоподъемными устройствами управляют через общую электрическую шину (7) посредством одного пульта управления (9а, 9b), отличающийся тем, что при одновременном управлении всеми грузоподъемными устройствами один из пультов управления (9а, 9b) находится в рабочем состоянии, а другой из пультов управления (9а, 9b) - в нерабочем состоянии,
при этом для перехода в режим группового управления всеми грузоподъемными устройствами режим управления отдельно каждым из грузоподъемных устройств прекращают выключением из рабочего состояния всех пультов управления (9а, 9b), кроме одного, который оставляют в рабочем состоянии и посредством которого осуществляют вхождение в режим группового управления всеми грузоподъемными устройствами и само управление этими грузоподъемными устройствами, а для перехода в режим управления отдельно каждым из грузоподъемных устройств режим группового управления прекращают посредством упомянутого оставшегося в рабочем состоянии пульта управления (9а, 9b), им же выбирают режим управления отдельно каждым из грузоподъемных устройств, и затем включают в рабочее состояние другой из пультов управления (9а, 9b) или другие пульты управления и вводят его/их в режим управления отдельно каждым из грузоподъемных устройств.
2. Способ по п. 1, отличающийся тем, что пультом управления (9а, 9b), находящимся в рабочем состоянии в режиме группового управления грузоподъемными устройствами, оперируют в трех видах режимов управления: режим группового управления параллельно несколькими грузоподъемными устройствами, режим управления только первым из группы грузоподъемных устройств и режим управления только вторым из группы грузоподъемных устройств.
3. Средства управления не менее чем двумя грузоподъемными устройствами, в частности подъемными кранами (1a, 1b), в режиме группового управления и в режиме управления отдельно каждым из группы кранов, причем каждое из грузоподъемных устройств имеет мотор (6а, 6b) привода грузоподъемных механизмов,
содержащие:
- системы управления (3а, 3b), связанные с указанными моторами (6а, 6b),
- пульты управления (9а, 9b) и
- общую шину (7) для приема/передачи управляющих сигналов, установленную с возможностью одновременного управления указанными грузоподъемными устройствами через пульты управления (9а, 9b),
отличающиеся тем, что в режиме группового управления вышеназванными грузоподъемными устройствами только один из пультов управления (9а, 9b) находится в рабочем состоянии, при этом для обеспечения возможности перехода названных средств управления из режима отдельного управления каждым из грузоподъемных устройств в режим группового управления ими все пульты управления (9а, 9b) находятся в нерабочем состоянии, кроме одного, остающегося в рабочем состоянии с возможностью переключения средств управления в режим группового управления грузоподъемными устройствами и управления ими в этом режиме, а для возможности перехода в режим отдельного управления каждым из грузоподъемных устройств данный пульт управления устроен с возможностью отключения режима группового управления, после чего остальные пульты управления имеют возможность войти в рабочее состояние с целью управления отдельно каждым из группы грузоподъемных устройств.
4. Средства управления по п. 3, отличающиеся тем, что пульт управления (9а, 9b), находящийся в рабочем состоянии в режиме группового управления грузоподъемными устройствами, устроен с возможностью управления ими в трех режимах: в групповом, когда он способен параллельно управлять группой грузоподъемных устройств, в первом обычном режиме, когда он способен управлять только первым из грузоподъемных устройств, и во втором обычном режиме, когда он способен управлять вторым из грузоподъемных устройств.
5. Средства управления по любому из пп. 3 или 4, отличающиеся тем, что общая шина (7) разделена на части (7а, 7b), связанные электропроводами с грузоподъемными устройствами, и часть (7с), беспроводно связанную с названными грузоподъемными устройствами.
6. Средства управления по любому из пп. 3 или 4, отличающиеся тем, что системы управления (3a, 3b) и пульты управления (9а, 9b) подсоединены к общей шине (7).
7. Средства управления по п. 5, отличающиеся тем, что системы управления (3a, 3b) и пульты управления (9а, 9b) подсоединены к общей шине (7).
8. Средства управления по любому из пп. 3, 4 или 7, отличающиеся тем, что системы управления (3a, 3b) устроены с возможностью контроля операций переключения пультами управления (9а, 9b) входа в определенный режим управления и выхода из него.
9. Средства управления по п. 5, отличающиеся тем, что системы управления (3a, 3b) устроены с возможностью контроля операций переключения пультами управления (9а, 9b) входа в определенный режим управления и выхода из него.
10. Средства управления по п. 6, отличающиеся тем, что системы управления (3a, 3b) устроены с возможностью контроля операций переключения пультами управления (9а, 9b) входа в определенный режим управления и выхода из него.
11. Средства управления по любому из пп. 3, 4, 7, 9 или 10, отличающиеся тем, что не менее двух грузоподъемных устройств выполнены в виде подъемных кранов (1a, 1b), которые кроме моторов (6a, 6b) грузоподъемных механизмов дополнительно снабжены моторами (4а, 4b) привода подъемных кранов (1a, 1b) и моторами (5а, 5b) привода крановых тележек подъемных кранов (1a, 1b), системы управления (3a, 3b) устроены с возможностью управления моторами (6а, 6b) и (5а, 5b), а системы управления (2а, 2b) устроены с возможностью управления моторами (4а, 4b), при этом системы управления (2а, 2b) подсоединены к общей шине (7).
12. Средства управления по п. 5, отличающиеся тем, что не менее двух грузоподъемных устройств выполнены в виде подъемных кранов (1a, 1b), которые кроме моторов (6а, 6b) грузоподъемных механизмов дополнительно снабжены моторами (4а, 4b) привода подъемных кранов (1a, 1b) и моторами (5а, 5b) привода крановых тележек подъемных кранов (1a, 1b), системы управления (3a, 3b) имеют возможность управлять моторами (6а, 6b) и (5а, 5b), системы управления (2а, 2b) имеют возможность управления моторами (4а, 4b), при этом системы управления (2а, 2b) связаны с шиной (7).
13. Средства управления по п. 6, отличающиеся тем, что не менее двух грузоподъемных устройств выполнены в виде подъемных кранов (1a, 1b), которые кроме моторов (6а, 6b) грузоподъемных механизмов дополнительно снабжены моторами (4а, 4b) привода подъемных кранов (1a, 1b) и моторами (5а, 5b) привода крановых тележек подъемных кранов (1a, 1b), системы управления (3a, 3b) имеют возможность управлять моторами (6а, 6b) и (5а, 5b), системы управления (2а, 2b) имеют возможность управления моторами (4а, 4b), при этом системы управления (2а, 2b) связаны с шиной (7).
| DE9115537U1,13.05.1993; |

