Изобретение относится к области автоматизации рабочих процессов дорожно-строительных машин, а именно к устройствам для автоматического управления рабочими процессами дорожно-строительных машин.
Известна система автоматического управления рабочим органом автогрейдера [RU 2327011, 20.06.2008], содержащая датчик действительной скорости машины, датчик объема грунта, задатчик опорных сигналов, управляющий блок, включающий в себя устройство ввода, постоянное запоминающее устройство, к выходам которых подключен однокристальный микроконтроллер, присоединенный своим выходом к устройству вывода, и исполнительный механизм, включающий в себя электрозолотники, подключенные своим входом к устройству вывода, отличающаяся тем, что однокристальный микроконтроллер имеет обратную связь с устройством ввода, постоянным запоминающим устройством и устройством вывода, а исполнительный механизм снабжен одним дополнительным гидроцилиндром для поворота отвала относительно продольной оси машины, обеспечивающим стабильную возможность непрерывного управления поворота отвала во время разработки грунта, и использует стандартное устройство поворота отвала, присоединенное своим входом к выходу электрозолотников, к другому выходу которых присоединен своим входом один дополнительный гидроцилиндр для поворота отвала относительно продольной оси машины, которые в результате совместной работы увеличивают или уменьшают угол захвата рабочего органа в процессе планирования грунта.
Недостатками данной системы являются отсутствие контура управления курсом движения машины и отсутствие возможности исключить человека-оператора из системы управления.
Известна система управления рабочим органом землеройно-транспортной машины [RU 2572434, 10.01.2016], содержащая контроллер и соединенные с ним инерциальный измеритель и орган ручного управления рабочим органом ЗТМ. Контроллер формирует сигналы управления регулируемым электрогидравлическим приводом подъема/опускания и/или перекоса рабочего органа из условия стабилизации его углового положения относительно машины или гравитационной вертикали, положения по высоте относительно машины, грунтовой поверхности или предварительно заданной проектной поверхности, скорости перемещения по какой-либо координате или соотношения скоростей горизонтального и вертикального перемещения.
Недостатками данной системы являются отсутствие контура управления курсом движения машины и отсутствие возможности исключить человека-оператора из системы управления.
Наиболее близкой по своей технической сущности и достигаемому техническому эффекту к предлагаемому изобретению является система автоматического управления движением трактора с роботизированной механической коробкой переключения передач [RU 2771704, 11.05.2022], содержащая шину обмена данных, коммутационный модуль, блок управления гидравликой, датчик угла поворота, гидравлический насос-дозатор, блок управления торможением, пневматический пропорциональный клапан, блок управления сцеплением, пневматический цилиндр актуации.
Недостатками данной системы являются отсутствие контура управления рабочим органом, что делает невозможным использование данной системы для управления дорожно-строительными машинами.
Задачей изобретения является создание системы автономного управления дорожно-строительной машины, имеющей возможности: построения требуемой траектории движения с учетом кинематических особенностей конкретной модели машины, реализации метода управления курсом движения машины с учетом расположения рабочего органа относительно базы машины и текущей скорости движения, управления рабочим органом машины в соответствии с проектом сооружения и точностными требованиями.
При этом достигаются следующие технические результаты:
1) возможность осуществления рабочего процесса дорожно-строительной машины без участия человека-оператора;
2) возможность накопления информации о траектории движения рабочего органа машины для построения «цифрового двойника» возводимого сооружения, который можно использовать в качестве входной информации при следующих этапах строительства и в течение всего жизненного цикла сооружения.
Преимуществом предлагаемого решения является исключение человека-оператора из контуров управления дорожно-строительной машиной, что позволит повысить производительность и точность выполнения работ.
Указанные технические результаты достигаются за счет того, что помимо управления рабочим органом на систему автономного управления возлагаются функции: построения оптимальной траектории движения дорожно-строительной машины на основе 3D-проекта сооружения и электронной карты местности с учетом кинематических ограничений дорожно-строительной машины.
Система автономного управления дорожно-строительной машины на основе информации о заданном курсе и текущем векторе состояния машины вырабатывает управляющие воздействия на гидравлическое рулевое управление и силовую установку. Цифровой 3D-проект сооружения позволяет сравнить текущее положение рабочего органа с проектными отметками и сформировать управляющее воздействие на гидропривод рабочего органа, изменяя его высотную и угловую координаты.
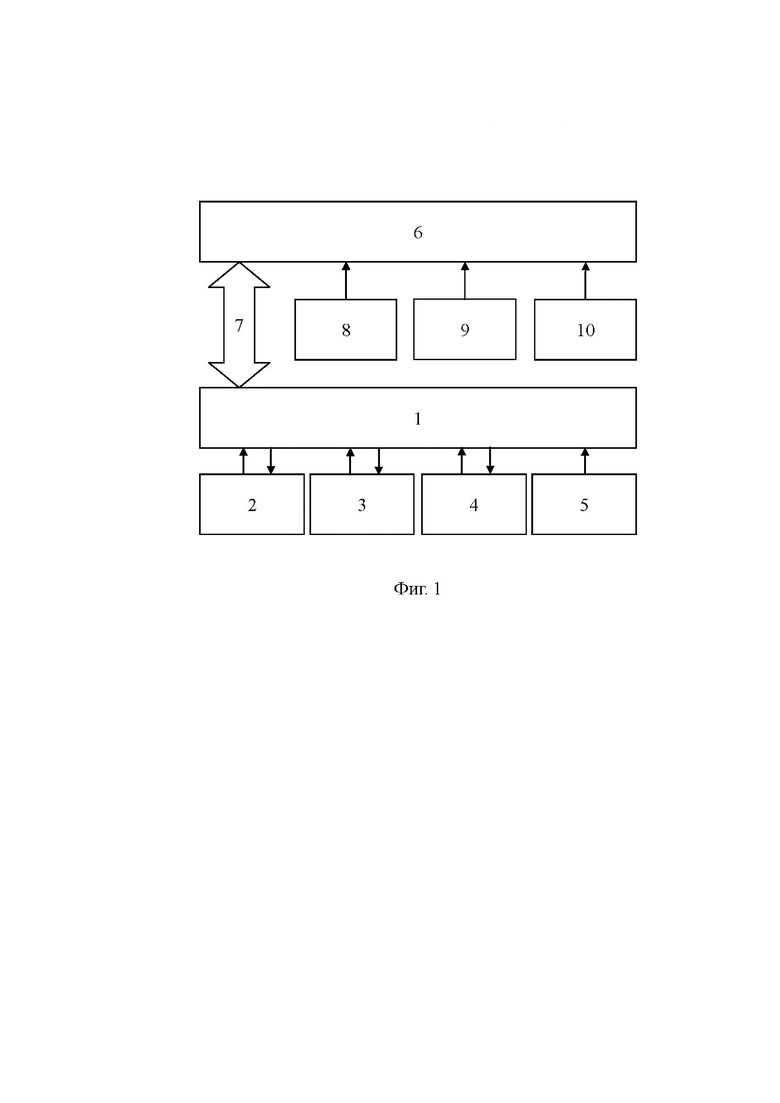
Изобретение поясняется прилагаемым чертежом и нижеследующим описанием, где на фигуре 1 приведена структурная схема системы автономного управления дорожно-строительной машины.
Система содержит бортовой контроллер нижнего уровня 1, со своим программным обеспечением, осуществляющий координацию работы автоматических подсистем, подсистему автоматического управления силовой установкой и трансмиссией 2 со своими датчиками первичной измерительной информации и исполнительными устройствами, подсистему автоматического управления гидравлического рулевого управления 3 со своими датчиками первичной измерительной информации и исполнительными устройствами, подсистему автоматического управления гидроприводом рабочего органа 4 со своими датчиками первичной измерительной информации и исполнительными устройствами. Блок датчиков 5, содержащий трехосный акселерометр-гироскоп на раме машины, датчик угла поворота передних колес, датчик угла захвата рабочего органа. Входы и выходы бортового контроллера 1 соединены с соответствующими выходами и входами подсистем автоматического управления силовой установкой и трансмиссией 2, гидравлического рулевого управления 3, гидроприводом рабочего органа 4, блоком датчиков 5. В систему введен бортовой компьютер верхнего уровня 6 со своим программным обеспечением, в который введены электронный проект сооружения в виде 3D-модели и электронная карта местности. Бортовой компьютер 6 через шину обмена данными 7 соединен с бортовым контроллером 1. На входы бортового компьютера 6 подаются сигналы с выходов лидара 8, камеры глубины 9, двух приемников сигналов глобальных навигационных спутниковых систем 10.
Два приемника сигналов глобальных навигационных спутниковых систем 10, трехосный акселерометр-гироскоп на раме машины, датчик угла поворота передних колес, датчик угла захвата рабочего органа формируют вектор состояния дорожно-строительной машины в каждый момент времени, содержащий координаты машины и ее рабочего органа в системе координат проекта, углы азимута, крена и тангажа машины, угол захвата рабочего органа, угол поворота передних колес и скорость машины. Лидар 8 проводит сканирование местности и позволяет обнаруживать препятствия на пути движения машины. Камера глубины 9 осуществляет картографирование пройденного пути. Бортовой компьютер верхнего уровня 6 осуществляет обработку информационных сигналов с приемников глобальных навигационных спутниковых систем 10, камеры глубины 9 и лидара 8, реализует метод построения заданной траектории движения машины с учетом ее кинематических особенностей, сравнивает положение машины и ее рабочего органа с проектом сооружения, представленного в виде 3D-модели сооружения и электронной карты местности, реализует метод управления движением машины, через шину обмена данными 7 и бортовой контроллер 1 осуществляет управление автоматическими подсистемами гидравлического рулевого управления 3, силовой установки с трансмиссией 2, гидропривода рабочего органа 4, что обеспечивает выполнение рабочего процесса дорожно-строительной машины в соответствии с проектом возводимого сооружения с требуемыми точностными характеристиками без участия человека-оператора.
Предлагаемое изобретение – система автономного управления дорожно-строительной машины, может быть изготовлена промышленным способом из серийно выпускаемых изделий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство профилирования дороги автогрейдером | 2018 |
|
RU2703074C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2559194C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| Способ профилирования дороги автогрейдером | 2018 |
|
RU2707614C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
Изобретение относится к строительным машинам. Система автономного управления дорожно-строительной машины содержит бортовой контроллер нижнего уровня, подсистемы автоматического управления, блок датчиков, лидар, камеру глубины, осуществляющую картографирование пройденного пути, два приемника сигналов глобальных навигационных спутниковых систем. Система содержит бортовой компьютер верхнего уровня, в который введены проект сооружения в виде 3D-модели и электронная карта местности. К этому компьютеру подключены камера глубины, лидар, два приемника глобальных навигационных спутниковых систем. Контроллеры верхнего и нижнего уровней связаны шиной обмена данными. Контроллер нижнего уровня соединен с подсистемами автоматического управления силовой установкой и трансмиссией, гидропривода рабочего органа, гидравлического рулевого управления, блока датчиков. Решение направлено на автоматизацию рабочего процесса. 1 ил.
Система автономного управления дорожно-строительной машины, содержащая бортовой контроллер нижнего уровня со своим программным обеспечением, подсистемы автоматического управления силовой установкой и трансмиссией, гидропривода рабочего органа, гидравлического рулевого управления, блок датчиков, лидар, позволяющий обнаруживать препятствия на пути движения машины, камеру глубины, осуществляющую картографирование пройденного пути, два приемника сигналов глобальных навигационных спутниковых систем, с помощью которых формируются информационные сигналы о координатах машины и ее рабочего органа в системе координат проекта, отличающаяся тем, что в систему введен бортовой компьютер верхнего уровня со своим программным обеспечением, в который введены проект сооружения в виде 3D-модели и электронная карта местности, к входам которого подключены камера глубины, лидар, два приемника глобальных навигационных спутниковых систем, который связан через шину обмена данными с бортовым контроллером нижнего уровня, входы и выходы которого соединены соответственно с выходами и входами подсистем автоматического управления силовой установкой и трансмиссией, гидропривода рабочего органа, гидравлического рулевого управления, блока датчиков.
| EP 3660231 A1, 03.06.2020 | |||
| DE 102019125702 A1, 02.04.2020 | |||
| EP 3147406 B1, 20.12.2017 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАКТОРА С РОБОТИЗИРОВАННОЙ МЕХАНИЧЕСКОЙ КОРОБКОЙ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2021 |
|
RU2771704C1 |
| СПОСОБЫ И ЭЛЕКТРОННЫЕ УСТРОЙСТВА ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ОКРУЖЕНИИ БЕСПИЛОТНОГО АВТОМОБИЛЯ | 2021 |
|
RU2767831C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДСКАЗАНИЯ БУДУЩЕГО СОБЫТИЯ В БЕСПИЛОТНОМ АВТОМОБИЛЕ (SDC) | 2019 |
|
RU2757038C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЬЮТЕРОМ НАЛИЧИЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2767955C1 |

