Настоящее изобретение относится к вибрационному инерциальному датчику угловой скорости, такому как гирометр или гироскоп, и к способу балансировки этого датчика.
Более конкретно настоящее изобретение относится к микроэлектромеханическим датчикам, которые также называются как МЭМС (микроэлектромеханические системы). Эти датчики производятся путем группового травления на пластине из материала с очень маленькой толщиной, при этом они являются маленькими, легкими и относительно недорогими, что позволяет их использовать в многочисленных областях применения, как в специализированных технических изделиях, так и в товарах широкого потребления.
Области применения этих датчиков включают в себя инерциальное измерение углов (свободный гироскоп) и угловых скоростей (скоростной гироскоп).
Вибрационные угловые инерциальные датчики типа МЭМС подразделяются на два семейства согласно определению резонатора. Резонатор может представлять собой деформируемое тело, в общем, асимметричное, в форме кольца, цилиндра, полусферы и диска. Резонатор может также состоять из одной или более недеформируемых масс, подсоединенных к опоре с помощью упругих элементов. Каждый датчик содержит приводы, предназначенные для установки деформируемого резонатора или системы масс/упругих элементов, колеблющихся на резонансной частоте системы, и детекторы деформаций деформируемого резонатора или перемещений системы масс/упругих элементов устанавливаются между деформируемым резонатором или системой масс/упругих элементов и опорой.
Производительность любого вибрационного инерциального датчика вытекает непосредственно из стабильности анизотропии затухания резонатора. Эта стабильность обусловлена:
- постоянной времени τ (равной механическому перенапряжению Q, деленному на τ и на частоту f, то есть τ=Q/(πf)) резонатора, регулирующего количество энергии, которое необходимо будет затратить на поддержание резонатора в резонансе,
- динамической балансировкой резонатора, чтобы, с одной стороны, ограничить внешние потери энергии на выходе датчика и, с другой стороны, ограничить искажения колебания резонатора через вибрирующую окружающую среду датчика на рабочей частоте.
В области вибрационных датчиков типа МЭМС это проявляется посредством:
- использования кремния в качестве материала для получения относительно высокого перенапряжения,
- наличия, по меньшей мере, двух масс, установленных симметрично таким образом, чтобы массы перемещались в противофазе, тем самым обеспечивая балансировку первого порядка.
Таким образом, вибрационные инерциальные датчики угловой скорости типа МЭМС с самой высокой производительностью имеют четыре массы, расположенные согласно квадратной конфигурации.
Однако повышение производительности этих датчиков ограничено дефектами производства датчиков.
Эти производственные дефекты приводят к динамической неуравновешенности, которая возникает в результате смещения общего центра тяжести масс на частоте колебаний. Эта динамическая неуравновешенность вызывает силы реакции в опоре и поэтому приводит к потере энергии колебаний. Это тем более трудно, так как маленький размер датчиков увеличивает воздействие производственных дефектов на точность измерений. Действительно, для МЭМС отношение [производственный дефект/характерные размеры] ухудшается по отношению к макроскопическому датчику. Это приводит к высокой динамической неуравновешенности относительно массы резонатора.
Результатом маленькой массы резонатора является то, что это затрудняет измерение дефектов динамической балансировки, поскольку нагрузки, которые вызывает разбалансировка, являются слишком маленькими для того, чтобы можно было измерить их. Кроме того, даже в том случае, если бы результат был бы успешным при выполнении этого измерения, было бы трудно скорректировать разбалансировку путем локального удаления или добавления материала из-за маленького размера датчика. Кроме того, такая коррекция путем удаления или добавления материала будет обладать тем недостатком, что она не позволит компенсировать изменения при разбалансировке в зависимости от температуры и времени.
Традиционно неуравновешенный резонатор жестко фиксируют на значительной рабочей массе по цене повышенной чувствительности к вибрациям и при меньшей механической устойчивости.
В случае резонаторов с несколькими массами это приводит к тому же к независимости от чувствительных масс. Механическое соединение, обеспечивающее компенсацию первого порядка смещений масс, гарантируется затем с помощью рычагов, взаимно соединяющих массы таким образом, чтобы ограничить их до смещения в противофазе. Производство датчика в дальнейшем становится сложным и дорогим. Кроме того, балансировка затруднена разрастанием степеней свободы, которое возникает в результате количества масс и количества соединяющих рычагов между массами, которые оказывают влияние на другие массы любой балансировочной коррекции, которая выполняется на одной из масс. По тем же причинам электронная балансировка посредством алгоритма коррекции является сложной для выполнения.
Изобретение является следствием другого подхода, задача которого состоит в том, чтобы улучшить вибрационные инерциальные датчики угловой скорости типа МЭМС.
С решения этой задачи выполнен согласно изобретению вибрационный инерциальный датчик угловой скорости типа МЭМС, содержащий опору, по меньшей мере, две массы, подвешенные в рамке, смонтированные с возможностью перемещения по отношению к опоре с помощью средства подвешивания, по меньшей мере, один электростатический привод и, по меньшей мере, один электростатический детектор. Этот привод и этот детектор предназначены соответственно для получения и обнаружения вибрации масс.
Таким образом, устранено прямое механическое соединение с помощью рычагов между массами. Действительно, механическое соединение между массами выполнено в настоящем изобретении с помощью подвесной рамки, тем самым упрощая конструкцию датчика. Привод и детектор, например, устанавливаются по отдельности между одной из масс и рамкой и действуют, как и раньше.
Предпочтительно, по меньшей мере, один датчик нагрузки устанавливается между рамкой и опорой, и, по меньшей мере, одна электростатическая пружина устанавливается между рамкой и одной из масс и корректируется таким образом, чтобы обеспечить динамическую балансировку датчика в зависимости от сигнала измерения датчика нагрузки.
Балансировку можно получить с помощью данной конструкции путем измерения анизотропии (или различия) по частоте между двумя системами масс/подвешивания и путем устранения этой анизотропии. Измерение анизотропии можно выполнить косвенным образом путем измерения результата разбалансировки, которая создается частотной анизотропией. Коррекция балансировки выполняется предпочтительно путем управления электростатической пружиной таким образом, чтобы добавить отрицательную электростатическую жесткость к жесткости системы масс/подвешивание, которая обладает самой высокой частотой таким образом, чтобы скорректировать внутреннее различие по угловой частоте из-за производственных дефектов и временным и тепловым изменениям параметров каждой из систем масс/подвешивания. Регулировка, основанная на нулевой подстройке, не требует какого-либо точного контрольного растягивающего усилия или стабильных коэффициентов усиления на уровне электронного оборудования для обработки датчика.
Задачей настоящего изобретения является также способ балансировки этого датчика.
Другие характеристики и преимущества изобретения будут очевидны после прочтения описания, которое сопровождается неограничивающими и конкретными вариантами осуществления изобретения.
Далее приводится ссылка на прилагаемые чертежи.
На фиг. 1 показан схематичный вид первого варианта осуществления датчика согласно изобретению,
на фиг. 2 - схематичный вид, иллюстрирующий принцип работы этого датчика,
на фиг. 3 - схематичный вид второго варианта осуществления датчика согласно изобретению,
на фиг. 4 - схематичный вид третьего варианта осуществления датчика согласно изобретению,
на фиг. 5 - схематичный вид варианта осуществления блока управления для датчика согласно изобретению.
Со ссылкой на фигуры изобретение относится к вибрационному инерциальному датчику угловой скорости типа МЭМС, предназначенному для образования свободного гироскопа или скоростного гироскопа.
Датчик согласно изобретению содержит опору 1 и, по меньшей мере, две массы 2, которые установлены с возможностью перемещения по отношению к опоре 1 и которые связаны с электростатическими приводами 3 и с электростатическими детекторами 4.
Массы 2 подвешиваются с помощью средства 5 подвешивания в рамке 6, непосредственно соединенной с опорой 1 с помощью средства 7 подвешивания. Средства 5 и 7 подвешивания являются изотропными в плоскости XY, определяющей плоскость подвешивания масс датчика, и производятся таким образом, чтобы проявлять значительную жесткость вдоль оси, перпендикулярной к плоскости датчика, чтобы устранить степени свободы масс 2 и опоры 6 за пределами плоскости. Каждая масса 2 опоры 6 имеет три степени свободы в плоскости, а именно может линейно перемещаться в двух направлениях (вдоль осей Х и Y) и вращаться (вокруг оси, перпендикулярной к плоскости XY).
Для каждой из осей Х и Y привод 3 и детектор 4 устанавливаются между каждой из масс 2 и рамкой 6. Приводы 3 и детекторы 4 имеют известную конструкцию в виде гребенчатых электродов, чьи зубья взаимно вставлены друг в друга. Гребни приводов 3 и детекторов 4 могут иметь режим работы с переменным зазором или с переменной площадью поверхности.
Массы 2 являются одинаковыми и имеют квадратную форму, причем на их сторонах расположены приводы 3 и детекторы 4. Средства 5 подвешивания расположены на вершинах каждой массы 2.
Две электростатические пружины 8 установлены между рамкой 6 и каждой из масс 2 таким образом, чтобы действовать соответственно по осям Х и Y. Электростатические пружины 8 имеют известную конструкцию в форме гребенчатых электродов, чьи зубья вставлены друг в друга. Гребни электростатических пружин 8 имеют режим работы с переменным зазором.
Детекторы эффекта разбалансировки, в данном случае более конкретно датчики силы, выполнены как единое целое со средством 7 подвешивания для того, чтобы обеспечить сигнал измерения, представляющий нагрузки, передаваемые на опору 1 рамкой 6. Эти датчики известны сами по себе и могут представлять собой пьезорезистивные или пьезоэлектрические тензодатчики.
Изготовление датчика согласно изобретению производится на основе традиционных технологий травления пластин полупроводникового материала. Полупроводниковым материалом, который используется в данном случае, является кремний.
Приводы 3 и детекторы 4 соединены электрическими проводниками (сами по себе известны) с блоком 9 управления (также известен сам по себе), который запрограммирован для управления приводами 3 и обработки сигналов детекторов 4, чтобы обеспечить обнаружение величины угловой скорости вокруг оси, перпендикулярной к плоскости смещения масс 2.
Электростатическая пружина 8 и датчики силы, выполненные как единое целое со средством 7 подвешивания, аналогичным образом соединены с блоком 9 управления, который программируется для подстройки электростатических пружин 8 в зависимости от сигналов упомянутых датчиков силы, которые демодулируются в зависимости от частоты колебаний масс 2 для того, чтобы устранить разбалансировку на частоте колебаний таким образом, чтобы обеспечить балансировку датчика.
Работа блока управления изображена на фиг. 5 при определении изменения Δkn жесткости для балансировки датчика согласно степени свободы "n". Здесь символически изображены эллиптические колебания большой оси "а" и малой оси "b". Большая ось колебания образует угол 9 в системе координат XY. Реализация гироскопа приводит к определению элементов управления С1 и С2 приводами 3 в зависимости от перемещений η1, η2, обнаруженных с помощью датчиков 4. Зная, что значения ηl=a.cosθcosφ+q.sinθsinφ и η2=a.sinθsinφ+q.cosθcosφ, можно произвести оценку a, q, θ и φ. Зная нагрузки εη, обнаруженные с помощью датчиков 7, блок управления вычисляет значения εη.cosφ и εη.sinφ, чтобы получить изменение Δkn жесткости, которое служит в качестве заданного значения для привода электростатических пружин 8.
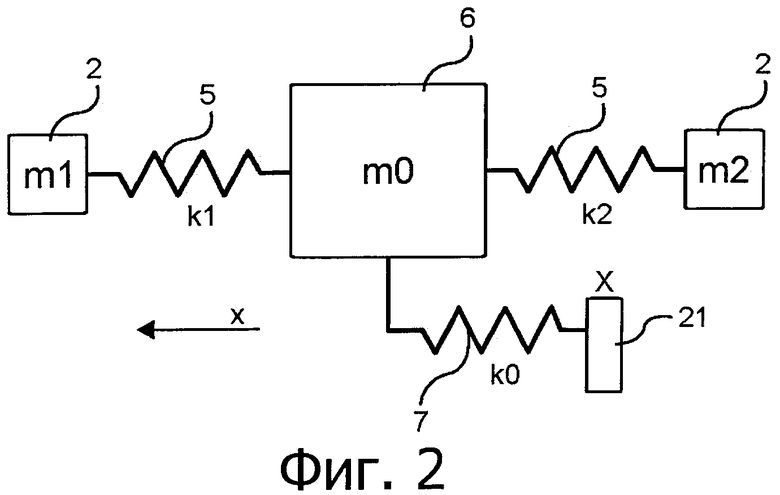
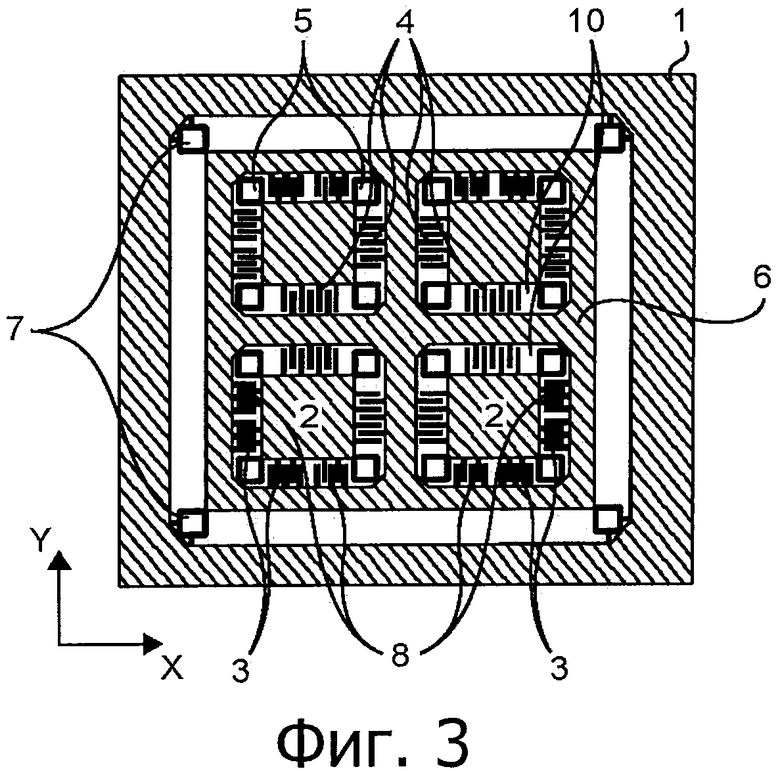
В варианте осуществления, показанном на фиг. 1 и 2, массы 2 равны двум по количеству и установлены рядом в пределах рамки 6. Рамка 6 имеет прямоугольную форму и содержит два расположенных рядом корпуса 10, каждый из которых вмещает одну из двух масс 2.
Более конкретно, со ссылкой на фиг. 2, датчик согласно первому варианту осуществления можно рассматривать в качестве двух систем (m1, k1) и (m2, k2) масс/пружин, которые связаны с внешним миром с помощью другой системы (m0, k0) масс/пружин.
Поведение датчика можно моделировать на основе следующих данных (различие по массе и различие по жесткости обозначены δm и δk соответственно):
m1:=m-(1+δm): m2:=m· (1-δn):
k1:=k·(l+δk): k2:=k·(1-δk):
m0:=β·m:k0=α·k:
k:=ω2·m:
Моделирование позволяет рассчитать частоты собственных мод, разбалансировку полезной собственной моды и противодействующую силу этой разбалансировки на опору.
Из этого следует, что разбалансировка пропорциональна массе m, отношению k0/k, обозначенному α, и различию по угловой частоте δω двух систем масс/пружин. Таким образом, разбалансировка полезной моды равна:
Разбалансировка=2mφδω.
Нагрузку, передаваемую во вне, можно выразить следующим образом:.
Нагрузка=2kαδω.
Из приведенных выше формул следует, что конкретная архитектура изобретения позволяет отменить разбалансировку за счет устранения различия по угловой частоте между двумя системами масс/пружин, причем различие наблюдается, исходя из измерения нагрузки на рамке. Поэтому можно выполнить балансировку датчика в соответствии с изобретением на основании следующих этапов, на которых:
- измеряют анизотропию по частоте между массами, причем этап измерения выполняется путем измерения нагрузки, прикладываемой рамкой к опоре в результате разбалансировки датчика, которая возникает из-за производственных дефектов,
- корректируют анизотропию по частоте между массами.
Этап коррекции выполняется путем управления электростатическими пружинами 8 таким образом, чтобы уменьшить это действие: подстройка, при которой используются демодуляции по отношению к частоте колебаний сигналов датчиков силы, включенных в средство 7 подвешивания, позволяет скорректировать жесткость электростатических пружин 8, размещенных между массами 2 и рамкой 6 для того, чтобы устранить разбалансировку на частоте колебаний.
В данном случае коррекция выполняется более точно за счет добавления отрицательный электростатический жесткости к жесткости системы масс/пружин, которая обладает высокой частотой для того, чтобы корректировать внутреннее различие по угловой частоте из-за производственных дефектов и временных и тепловых изменений параметров каждой из систем масса-пружина.
Следует отметить, что размещение датчика позволяет получить две собственные моды по оси X, то есть смещение масс m1 и m2 в фазе и смещение масс m1 и m2 в противофазе, с маленьким смещением массы m0, которые не равны по частоте. Различие по частоте, например, порядка 10%, в случае, если m0=10*m1/2 или 25%, если m0=4*m1/2. Это подтверждает возможность упрощения конструкции, не используя при этом какие-либо рычаги механического соединения между массами, без какого-либо риска связи между двумя собственными модами во время работы.
Таким образом, можно изготовить гирометр с контуром обратной связи, имеющий 2 колеблющиеся массы с подстройкой в 0 перемещения по траектории Y Кориолиса. Это позволяет использовать собственную моду, которая разбалансирована до первого порядка для этой траектории.
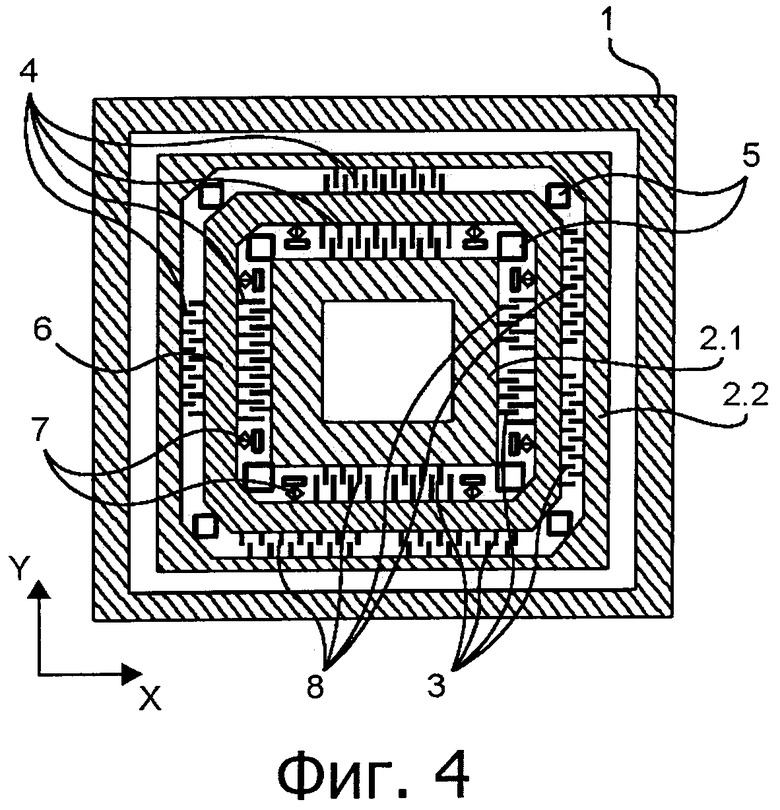
В варианте осуществления, показанном на фиг. 3, имеются четыре массы 2, расположенные согласно квадратной конфигурации, и электростатическая пружина 8 размещается между рамкой 6 и каждой из четырех масс 2, для каждой оси Х и Y. Рамка 6 имеет квадратную форму и содержит четыре смежных корпуса 10, каждый из которых вмещает одну из масс 2.
В этом варианте осуществления датчик также сбалансирован до первого порядка по оси Y за счет размещения с четырьмя массами. Поэтому этот датчик можно использовать в режиме гироскопа, и он позволяет извлекать пользу из преимуществ, присущих этому режиму, а именно стабильности среднего сдвига.
В варианте осуществления, показанном на фиг. 4, имеется две массы 2.1, 2.2, которые сконструированы с возможностью концентрической установки. Рамка 6 имеет квадратную форму, и массы 2.1, 2.2 в форме квадратного кольца размещаются на любой стороне рамки 6.
Поэтому массы 2.1, 2,2 имеют форму рамки с совмещенными осями симметрии, которые обладают одинаковыми собственными частотами. Предпочтительно массы рамок 2,1, 2,2 являются одинаковыми, и средство для подвешивания масс 2.1, 2.2 имеет одинаковую жесткость. Это позволяет выполнить условие предположений уравнений динамического моделирования, представленных выше.
Конечно, настоящее изобретение не ограничивается описанными вариантами осуществления, но охватывает любой вариант, находящийся в области изобретения так, как это ограничено формулой изобретения.
Можно иметь электростатические пружины, подстраиваемые под все массы 2 или под все массы 2, за исключением одной.
Результат измеренной разбалансировки может представлять собой нагрузку, прикладываемую рамкой 6 к опоре 1, ускорение рамки 6 по отношению к опоре 1, скорость рамки 6 по отношению к опоре 1, смещение рамки 6 по отношению к опоре 1 или другое.
Датчик может иметь различную форму из тех, которые описаны. Массы и рамка могут иметь, в плоскости датчика, многоугольную или, по меньшей мере, частично искривленные формы, которые можно описать путем четырех поворотов на 90° конфигурации, представляющей собой четверть геометрии.
Привод и детектор можно установить между одной из масс и рамой или между одной из масс и опорой.
По меньшей мере, один электростатический привод и, по меньшей мере, один электростатический детектор можно разместить между рамкой 6 и опорой 1, чтобы достичь активного демпфирования, известного как такового, подвешивания 7 рамки 6.
Изобретение также относится к датчику, чьи массы будут подвешены в рамке и который будет лишен активного средства балансировки, описанного в связи с вариантом осуществления, изображенным на фигурах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резонатор для встраивания в инерциальный угловой датчик | 2018 |
|
RU2753462C2 |
| ИНЕРЦИАЛЬНЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ С КОМПЕНСАЦИЕЙ ОТКЛОНЕНИЯ | 2009 |
|
RU2483278C2 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ДЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2580879C2 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2007 |
|
RU2348902C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2544870C2 |
| Способ компенсации погрешности от углового ускорения основания для кориолисова вибрационного гироскопа с непрерывным съёмом навигационной информации | 2016 |
|
RU2659097C2 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |

Изобретение относится к вибрационному инерциальному датчику угловой скорости, такому как гирометр или гироскоп, и к способу балансировки этого датчика. Вибрационный инерциальный датчик угловой скорости типа МЭМС содержит опору для, по меньшей мере, двух масс, которые установлены с возможностью перемещения по отношению к опоре, и, по меньшей мере, один электростатический привод и, по меньшей мере, один электростатический детектор, которые предназначены соответственно для выработки и обнаружения колебания масс, при этом массы подвешены в рамке, которая присоединена с помощью средства подвешивания к опоре так, что массы и рамка имеют три степени свободы в плоскости относительно опоры. Технический результат - повышение точности балансировки датчика. 2 н. и 12 з.п. ф-лы, 5 ил.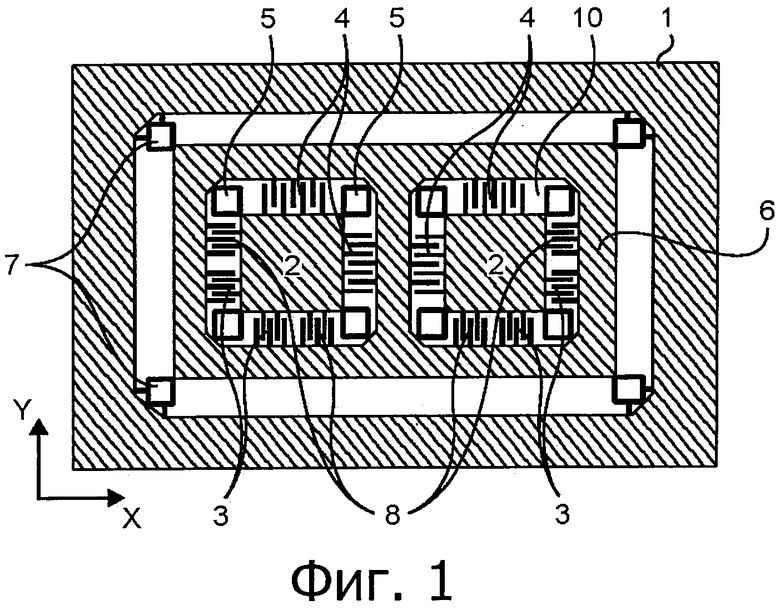
1. Вибрационный инерциальный датчик угловой скорости типа МЭМС, содержащий опору (1) для, по меньшей мере, двух масс (2), которые установлены с возможностью перемещения по отношению к опоре, и, по меньшей мере, один электростатический привод (3) и, по меньшей мере, один электростатический детектор (4), которые предназначены соответственно для выработки и обнаружения колебания масс, отличающийся тем, что массы подвешены в рамке (6), которая присоединена с помощью средства подвешивания к опоре (1) так, что массы и рамка имеют три степени свободы в плоскости относительно опоры.
2. Датчик по п. 1, отличающийся тем, что количество масс (2) составляет две.
3. Датчик по п. 2, отличающийся тем, что массы (2) установлены бок о бок в пределах рамки (6).
4. Датчик по п. 2, отличающийся тем, что массы (2) выполнены с возможностью установки концентрическим образом на любой стороне рамки (6).
5. Датчик по п. 2, отличающийся тем, что, по меньшей мере, одна электростатическая пружина (8) установлена между рамкой и, по меньшей мере, одной из масс, для каждой из двух осей, определяющих плоскость подвешивания масс, количество электростатических пружин (8) составляет предпочтительно четыре и каждая из них установлена между рамкой (6) и каждой из масс (2).
6. Датчик по п. 1, отличающийся тем, что количество масс (2) составляет четыре и они расположены согласно квадратной конфигурации.
7. Датчик по п. 6, отличающийся тем, что электростатическая пружина (8) установлена между рамкой и, по меньшей мере, тремя массами, для каждой из двух осей, определяющих плоскость подвешивания масс, количество электростатических пружин (8) составляет предпочтительно восемь, и каждая из них установлена между рамкой (6) и каждой из масс (2).
8. Датчик по любому из пп. 1-7, отличающийся тем, что, по меньшей мере, один детектор эффекта разбалансировки установлен между рамкой и опорой и, по меньшей мере, одна электростатическая пружина (8) расположена между рамкой и одной из масс и выполнена с возможностью подстройки таким образом, чтобы гарантировать динамическую балансировку датчика в зависимости от сигнала измерения детектора эффекта разбалансировки.
9. Датчик по п. 1, отличающийся тем, что каждый из электростатического привода и электростатического детектора установлен между одной из масс и рамкой.
10. Способ балансировки датчика по п. 8, содержащий этапы, на которых измеряют и корректируют анизотропию по частоте между массами (2) из-за производственных дефектов, причем этап измерения выполняют путем измерения эффекта, производимого разбалансировкой датчика, возникающей в результате частотной анизотропии, а этап коррекции выполняют путем подстройки управления электростатической пружиной (8) для того, чтобы уменьшить этот эффект.
11. Способ по п. 10, в котором измеряемый эффект разбалансировки представляет собой нагрузку, прикладываемую с помощью рамки (6) к опоре (1).
12. Способ по п. 10, в котором измеряемый эффект разбалансировки представляет собой ускорение рамки (6) по отношению к опоре (1).
13. Способ по п. 10, в котором измеряемый эффект разбалансировки представляет собой скорость рамки (6) по отношению к опоре (1).
14. Способ по п. 10, в котором измеряемый эффект разбалансировки представляет собой смещение рамки (6) по отношению к опоре (1).
| US 2009090200 A1, 09.04.2009 | |||
| WO 9214160 A1, 20.08.1992 | |||
| US 20100257934 A1, 14.10.2010 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 1996 |
|
RU2110768C1 |

