ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области вибрационных инерциальных угловых датчиков, таких как гирометр или гироскоп, и более конкретно к электромеханическим датчикам или МЭМС (микроэлектромеханическим системам, MEMS).
УРОВЕНЬ ТЕХНИКИ
Вибрационные инерциальные угловые датчики типа МЭМС могут быть разделены на два семейства в зависимости от конструкции резонатора. Резонатор представляет собой физическое устройство с механическим резонансом на частоте, известной как резонансная частота.
В первом семействе резонатор представляет собой деформируемое тело, обычно с вращением вокруг оси (кольцо, цилиндр, полусфера, диск). Во втором семействе резонатор состоит из одной или более недеформируемых масс, соединенных с опорой упругими элементами. Настоящее изобретение относится, в частности, к резонатору, принадлежащему ко второму семейству, следовательно, в форме системы масса/пружина.
Инерциальный угловой датчик обычно содержит приводы, выполненные с возможностью вызывать колебания резонатора с заданной резонансной частотой, и детекторы деформации резонатора. Приводы и детекторы деформации обычно устанавливаются между резонатором и опорой.
Инерциальный угловой датчик типа МЭМС используется для измерения угловой скорости (режим гирометра) или углового положения (режим гироскопа).
Чтобы получить высокопроизводительный инерциальный датчик, важно, чтобы характеристики резонатора были изотропными, т.е. были одинаковыми независимо от ориентации колебаний резонатора. Другими словами, отсутствует ошибка измерения, зависящая от углового положения колебания.
Если мы возьмем пример гироскопа, резонатор которого имеет две характерных моды, ориентация колебаний которых составляет 90 градусов, когда вращение прикладывается к опоре резонатора, относительное перемещение колебания относительно резонатора в точности противоположно этому вращению. Для повышения точности такого гироскопа характеристики жесткости и демпфирования резонатора должны быть изотропными, т.е. равномерными во всех направлениях.
Для традиционных вариантов осуществления МЭМС-датчиков точность обработки резонаторов недостаточна для получения требуемой изотропии жесткости. Например, для резонатора, частота которого составляет порядка 10 кГц, полученная частотная анизотропия может достигать ±1%, т.е. ±100 Гц, в то время как функциональные требования для реализации точного вибрационного гироскопа требуют анизотропии, намного меньшей, чем ±1 Гц.
Одна цель состоит в том, чтобы предложить решение для коррекции частотной анизотропии резонатора с подвешенной массой для получения высокоэффективного вибрационного гироскопа.
Резонатор с подвешенной массой представляет собой тип резонатора, известный в области МЭМС. Он включает в себя по меньшей мере одну систему масса/пружина с двумя ортогональными особыми модами с близкими частотами колебаний для измерения вращений оси, перпендикулярных плоскости колебания массы. Подвешенная масса имеет три степени свободы, в том числе два перемещения и одно вращение.
Французская заявка на патент FR 2 983 574 предлагает решение для балансировки вибрационного инерциального углового датчика, такого как вибрационный гироскоп, путем обеспечения более стабильной демпфирующей анизотропии резонатора. Описанный резонатор состоит из двух концентрических масс квадратной кольцеобразной формы. Баланс, таким образом, достигается путем коррекции динамического дисбаланса, возникающего в результате перемещения общего центра тяжести массовых тел на частоте колебаний. Коррекция достигается с помощью специальной механической конструкции инерциального углового датчика и индивидуальной регулировки жесткости электростатических пружин. Используемые электростатические пружины имеют направления действия, перпендикулярные сторонам масс, что не позволяет компенсировать частотную анизотропию во всех направлениях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем изобретении предлагается решение, позволяющее придавать жесткость изотропному резонатору во всех направлениях, в основном путем электрической, а не механической регулировки, что делает это решение обеспечивающим преимущество при применении к инерциальным угловым датчикам, которые могут иметь механические конструкции и переменные формы.
Настоящее изобретение относится к резонатору, выполненному с возможностью встраивания в инерциальный угловой датчик, причем упомянутый резонатор содержит по меньшей мере одну массу, подвешенную на механических пружинах, и имеет N пар Pi (2≤i≤N) электростатических пружин, причем упомянутый резонатор имеет по меньшей мере четыре оси симметрии S1, S2, S3 и S4 и имеет следующие характеристики:
- каждая пара Pi состоит из двух электростатических пружин, каждая с предпочтительной осью D действия, причем эти электростатические пружины расположены так, что их соответствующие оси D образуют прямой угол,
- для по меньшей мере одной электростатической пружины одной из пар и одной электростатической пружины другой пары угол, образованный этими двумя электростатическими пружинами, равен заранее заданному углу.
Изобретение может также иметь одну или более из следующих характеристик:
- заранее заданный угол предпочтительно составляет 45 градусов,
- каждая пара Pi симметрична по меньшей мере одной другой паре Pj (с j≠i) относительно по меньшей мере одной из осей симметрии S1, S2, S3S4 резонатора,
- каждая электростатическая пружина образует угол альфа = 90/N градусов с по меньшей мере двумя из четырех осей симметрии S1, S2, S3 и S4 резонатора,
- в случае, когда N строго больше двух, каждая пружина каждой пары Pi симметрична по меньшей мере двум пружинам других пар соответственно относительно одной из осей симметрии S1, S2, S3, S4 резонатора,
- в случае, когда N строго больше двух, каждая пара Pi симметрична двум другим парам Pj, Pk (с j≠i, k≠i, и k≠j) соответственно относительно двух из осей симметрии S1, S2, S3, S4 резонатора,
- в случае, когда N строго больше двух, каждая пружина каждой пары Pi симметрична четырем пружинам других пар соответственно относительно одной из осей симметрии S1, S2, S3, S4 резонатора.
Во-вторых, изобретение предлагает инерциальный угловой датчик, содержащий опору и резонатор, как описано выше, по меньшей мере одна масса которого соединена с опорой с помощью N пар электростатических пружин и механических пружин.
Инерциальный угловой датчик может обеспечивать одну или более из следующих характеристик:
- инерциальный угловой датчик содержит внутреннюю и внешнюю массу, соединенные между собой соединительными пружинами, каждая из которых соединена с опорой с помощью механических пружин, и каждая из которых соединена с опорой с помощью N электростатических пружин,
- внешняя масса имеет по существу квадратную кольцеобразную форму,
- внутренняя и внешняя массы имеют одинаковые оси симметрии.
В-третьих, в изобретении предлагается способ коррекции жесткости резонатора, встроенного в инерциальный угловой датчик, как описано выше, включающий в себя этапы:
- измерение частот колебаний для различных ориентаций колебаний с использованием детекторов деформации,
- определение на основе этих измерений неудовлетворительной жесткости KU резонатора,
- вычисление, исходя из неудовлетворительной жесткости KU, напряжений, которые будут применены к выбору пружин,
- применение вычисленных напряжений к выбору пружин,
- повторение предыдущих этапов, если частотная анизотропия колебаний резонатора больше порогового значения частотной анизотропии.
В соответствии с предпочтительным вариантом осуществления способа пороговое значение частотной анизотропии составляет 1 Гц.
Изобретение и другие детали, характеристики и преимущества изобретения будут более понятны из последующего описания, которое приводится в качестве неограничивающего примера со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой пример резонатора с подвешенной массой.
Фиг. 2 представляет собой иллюстрацию в виде упрощенной схемы электростатической пружины.
Фиг. 3 представляет собой иллюстрацию примера осуществления изобретения с четырьмя электростатическими пружинами.
Фиг. 4 представляет собой иллюстрацию схемы, образованной восемью электростатическими пружинами, в соответствии с примером осуществления настоящего изобретения.
Фиг. 5 представляет собой иллюстрацию резонатора с подвешенной массой в соответствии с примером осуществления настоящего изобретения.
Фиг. 6 представляет собой иллюстрацию резонатора с подвешенной массой в соответствии с примером осуществления настоящего изобретения.
Фиг. 7 представляет собой иллюстрацию инерциального датчика, оборудованного резонатором, в соответствии с примером осуществления.
Фиг. 8 представляет собой иллюстрацию инерциального датчика, оборудованного резонатором, в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение относится к резонатору 1, предназначенному для встраивания в инерциальный угловой датчик 2, например типа МЭМС.
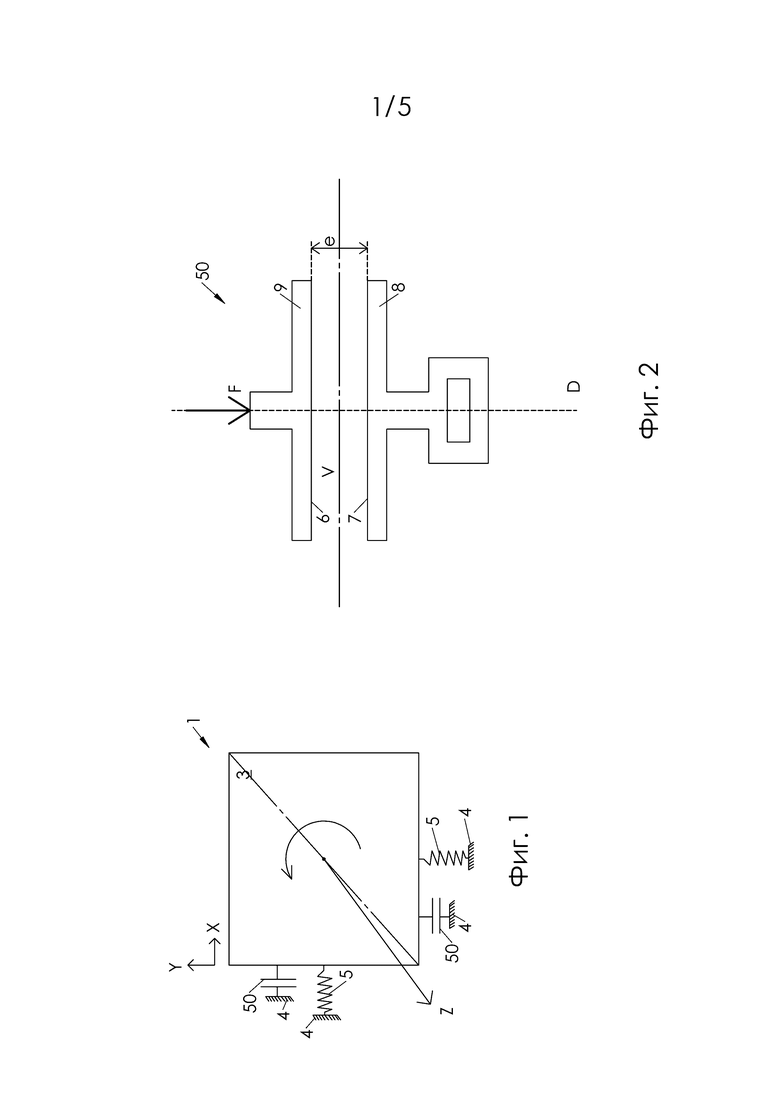
Сначала делается ссылка на фиг. 1, иллюстрирующую пример резонатора с массой 3, подвешенной на опоре 4. Это включает в себя по меньшей мере одну вибрирующую массу 3, подвешенную с помощью по меньшей мере двух ортогональных механических пружин 5. Масса 3 имеет три степени свободы, т.е. два перемещения по осям X и Y и одно вращение вокруг оси Z, перпендикулярной к осям X и Y. Каждая механическая пружина имеет определенную жесткость.
Параллельно с механическими пружинами 5 расположены электростатические пружины 50, принцип действия которых приведен на фиг. 2.
Фиг. 2 представляет собой иллюстрацию в виде упрощенной схемы электростатической пружины. Как показано на фиг. 2, электростатическая пружина состоит из по меньшей мере двух параллельных поверхностей 6 и 7, образованных неподвижным электродом 8 и подвижным электродом 9, воздушный зазор е для которых, т.е. зазор между двумя поверхностями, изменяется под действием колебаний. Подвижный электрод движется вдоль предпочтительной оси D деформации пружины 50. Электростатическое притяжение между двумя поверхностями 6 и 7 демонстрируется электростатической силой F, приложенной к подвижному электроду 9. Постоянное напряжение V прикладывается между двумя поверхностями. Это напряжение V генерирует отрицательную жесткость, которая добавляется к механической жесткости механической пружины, чтобы составить общую жесткость эквивалентной пружины.
Пружина 50, показанная на фиг. 2, является упрощенным вариантом. В действительности, электроды 8 и 9 также могут иметь форму встречноштыревой кремниевой гребенчатой структуры, например. Принцип работы остается прежним.
Одной из целей настоящего изобретения является управление частотой колебаний резонатора 1 путем регулировки жесткости электростатических пружин 50.
Теоретический анализ показывает, что неудовлетворительная жесткость KU резонатора, состоящего из подвешенной массы, как показано на фиг. 1, является функцией, переменная которой равна удвоенному угловому θ положению колебаний, измеренному относительно оси, перпендикулярной плоскости, в которой перемещается масса 3. Эта функция иллюстрируется следующим уравнением (1):

где δk - половина относительного отклонения жесткости Kx - жесткость в направлении X и Ky - жесткость в направлении Y; k - среднее значение жесткости Kx и Ky.
В конкретных случаях, когда используется 0 градусов θ, неудовлетворительная жесткость KU может быть выражена уравнением (2), а в случаях, когда используется 90 градусов θ, KU может быть выражена уравнением (3):


Угол θ - это угол между направлением движения массы 3 и осью X плоскости X,Y, в которой перемещается масса 3. Он используется для определения начальной ориентации неудовлетворительной жесткости KU.
Несоосность механических пружин 5 на фиг. 1 и/или использование пружин 5 на двух осях приводит к возникновению составляющей sin(2θ).
Электростатические пружины 50 должны поэтому быть расположены на резонаторе 1 таким образом, что неудовлетворительная жесткость может быть компенсирована независимо от угла θ. Это приводит к необходимости иметь возможность компенсировать компоненты как косинуса cos(2θ), так и синуса sin(2θ) неудовлетворительной жесткости KU. Когда жесткость KU, является переменной функцией 2θ, переход от компонента косинуса к компоненту синуса достигается посредством физического поворота на 45 градусов.
Однако электростатические пружины 50 создают только отрицательную жесткость. По этой причине необходима по меньшей мере одна пара Р электростатических пружин 50, оси деформации которых образуют прямой угол, для увеличения или уменьшения жесткости Kx или Ky.
Фиг. 3 представляет собой иллюстрацию примера осуществления резонатора с четырьмя электростатическими пружинами. В случае фиг. 3 резонатор 2 содержит две пары электростатических пружин 50, смещенных на угол, отличный от 0 и 90 градусов, от оси X, т.е. две пары Р1 и Р2 электростатических пружин, смещенных попарно, например, на 45 градусов, причем каждая пара состоит из двух пружин 50, предпочтительные оси действий которых образуют прямой угол, как показано на фиг. 3. Чтобы упростить представление пружин 50 в их соответствующих положениях и ориентациях, каждая пружина 50 представлена стрелкой. Эта конфигурация делает возможной компенсацию, независимую от компонентов синуса и косинуса. Предполагается, что можно использовать четыре электростатических пружины, каждая из которых образует угол α-β, α+β, α-β+90 и α+β+90 соответственно с осью X с 0<β≤45. Эта конфигурация делает возможной компенсацию частотной анизотропии во всех направлениях.
В частном случае на фиг. 3 α и β каждый составляет 22,5 градуса. Значение β не предписывается, но 22,5 градуса является оптимальным значением для компенсации частотной анизотропии во всех направлениях и является предпочтительным параметром.
В конце каждой стрелки указывается характер компенсируемого компонента (-cos для отрицательного косинусного компонента, +cos для положительного косинусного компонента, -sin для отрицательного синусового компонента, +sin для положительного синусового компонента).
На этой фиг. 3 пружина 50 пары P1, компенсирующей положительный косинусный компонент, была преднамеренно представлена пунктирными линиями, чтобы показать ее положение и ориентацию, соответствующие ее представлению в виде стрелки.
Для данного резонатора 1 конечное число осей симметрии может быть определено в соответствии с его формой, например, четыре оси симметрии, отмеченные S1, S2, S3 и S4. Эти оси симметрии совпадают с осями симметрии массы или масс резонатора.
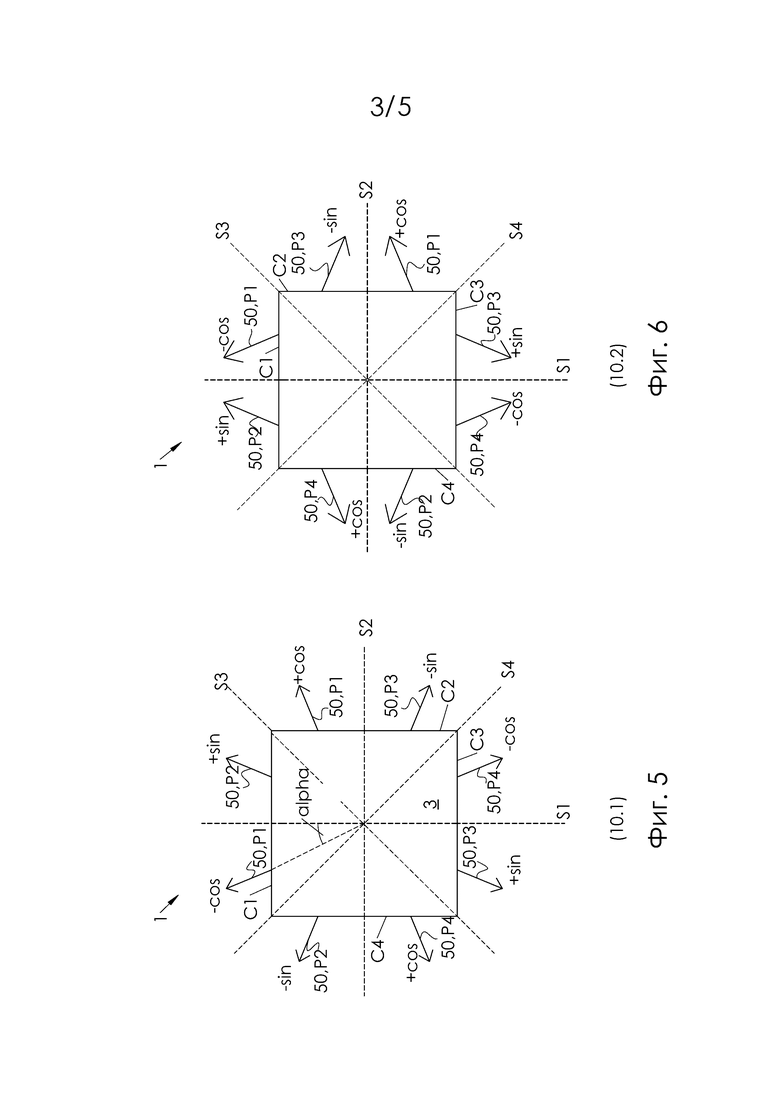
По соображениям симметрии настоящее изобретение предусматривает использование N пар Pi (N≥2,1≤i≤N) пружин 50 в соответствии с формой резонатора 1, расположенных регулярно под одним и тем же углом. Пример осуществления, дающий преимущество, с восемью электростатическими пружинами 50 показан на фиг. 4, фиг. 5 и фиг. 6, соответствующих четырем парам, отмеченным Р1, Р2, Р3 и Р4.
Фиг. 4 представляет собой иллюстрацию схемы, образованной восемью электростатическими пружинами, в соответствии с примером осуществления настоящего изобретения. В соответствии с этим вариантом осуществления восемь электростатических пружин 50 разнесены на 45 градусов друг от друга и вместе образуют схему 10, ориентация которой относительно осей симметрии S1, S2, S3 и S4 резонатора 1 является свободной, что ведет к большому числу возможных топологий.
Для резонатора квадратной формы, как показано на фиг. 5, предпочтительная ориентация получается путем поворота схемы на фиг. 4 на угол 22,5 градуса, что приводит к постоянному углу 22,5 градуса между каждой электростатической пружиной 50 и двумя из четырех осей симметрии (S1, S2, S3 и S4) резонатора 1. На фиг. 5 электростатические пружины 50 определяют схему, отмеченную 10.1. В этой конфигурации пружины 50 расположены так, что они могут быть сгруппированы в N пар Pi (или N≥2, 21≤i≤N,) пружин 50, предпочтительные оси действий которых образуют прямой угол, и таким образом, что каждая пружина 50 образует угол 90/N градусов с по меньшей мере двумя осями симметрии резонатора 1.
С другой стороны из схемы 10.1 на фиг. 5 можно переключать - для каждой стороны С1, С2, С3 и С4 резонатора 1 - две пружины 50, что приводит к схеме 10.2 на фиг. 6. Схема 10.2 определяется всеми электростатическими пружинами 50 на фиг. 6. Каждая схема 10.1 и 10.2 обеспечивают топологию пружин 50, указывая их положения и относительные ориентации.
Таким образом, резонатор 1 содержит по меньшей мере массу 3, N пар Pi (N≥2, 1≤i≤N) электростатических пружин 50 и по меньшей мере четыре оси симметрии S1, S2, S3 и S4. В примерах осуществления, показанных на фиг. 5 и фиг. 6, N равно четырем (N=4).
Варианты осуществления резонатора 1, показанные на фиг. 5 и фиг. 6, имеют следующие общие характеристики:
- каждая пара Pi состоит из двух электростатических пружин 50, каждая с предпочтительной осью D действия, причем эти электростатические пружины 50 расположены так, что их соответствующие оси D образуют прямой угол,
- для по меньшей мере одной пружины одной из пар и одной пружины другой пары угол, образованный этими двумя пружинами, равен заранее заданному углу, и, например, 45 градусов.
- каждая пара Pi симметрична относительно по меньшей мере одной другой пары Pj (with j≠i) в отношении по меньшей мере одной из осей симметрии S1, S2, S3S4 резонатора 1,
- каждая пружина 50 каждой пары Pi симметрична по меньшей мере двум пружинам 50 других пар соответственно в отношении одной из осей симметрии S1, S2, S3, S4 резонатора 1.
Вариант осуществления резонатора 1, представленный на фиг. 5, имеет следующие конкретные характеристики:
- каждая пара Pi симметрична двум другим парам Pj, Pk (с j≠ik≠i и k≠j) соответственно в отношении двух из осей симметрии S1, S2, S3, S4 резонатора 1,
- каждая пружина 50 каждой пары Pi симметрична четырем пружинам 50 других пар соответственно в отношении одной из осей симметрии S1, S2, S3, S4, резонатора 1.
- каждая пружина 50 каждой пары Pi образует угол alpha = 90/N градусов с по меньшей мере двумя из четырех осей симметрии резонатора 1.
Варианты осуществления резонатора 1, представленные на фиг. 5 и фиг. 6, позволяют осуществлять всестороннюю компенсацию (во всех направлениях) частотной анизотропии резонатора 1. Настоящее изобретение также предлагает инерциальный угловой датчик 2, оборудованный резонатором 1, как описано выше. Этот инерциальный угловой датчик 2 включает в себя опору 4 и резонатор 1, массу (-ы) 3 которая соединена/соединены с опорой с помощью N пар электростатических пружин и механических пружин 5.
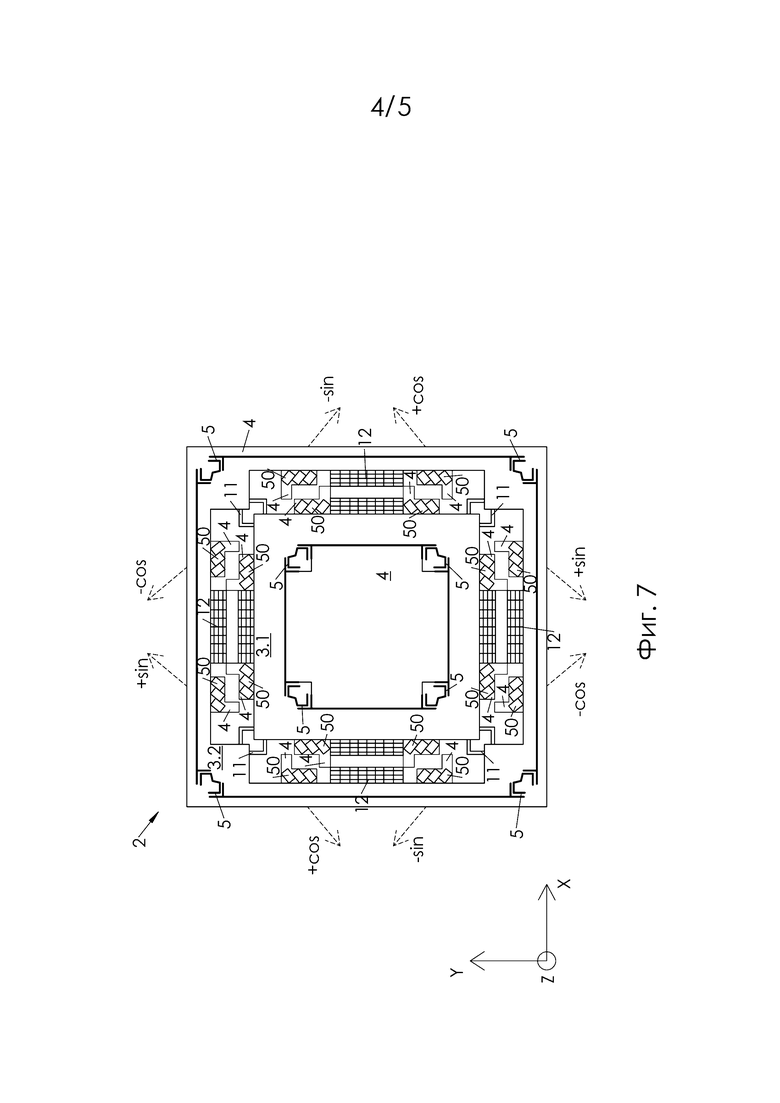
В соответствии с одним вариантом осуществления, показанным на фиг. 7, датчик 2 имеет две концентрические массы 3.1 (внутренняя масса) и 3.2 (внешняя масса), каждая из которых соединена механическими пружинами 5, каждая из которых состоит из двух пружинящих пластин, расположенных под углом 90 градусов, с опорой 4. Соединительные пружины 11 соединяют две массы 3.1 и 3.2 вместе. Приводы 50 установлены между каждой массой 3.1 и 3.2 и опорой 4. Каждая масса 3.1 и 3.2 имеет три степени свободы в плоскости, т.е. два перемещения (вдоль осей X и Y) и одно вращение (вокруг оси, перпендикулярной плоскости X и Y).
Массы 3.1 и 3.2 имеют совпадающие оси симметрии, образующие оси симметрии S1, S2, S3, S4 датчика 2, причем упомянутые массы имеют идентичные собственные частоты. Используемая мода колебаний соответствует противоположным перемещениям двух масс. Это колебание может иметь любую ориентацию. Для каждой из масс 3.1 и 3.2 использовалась топология 50 электростатических пружин, такая как описанная с помощью схемы 10.2 на фиг. 6.
В примере осуществления по фиг. 7 имеется четыре пары электростатических пружин 50 для каждой подвешенной массы 3.1 и 3.2. В соответствии с предпочтительным вариантом массы 3.1 и 3.2 имеют по существу квадратные кольцеобразные формы. Однако это не является обязательным для внутренней массы 3.1, которая может быть квадратной и сплошной.
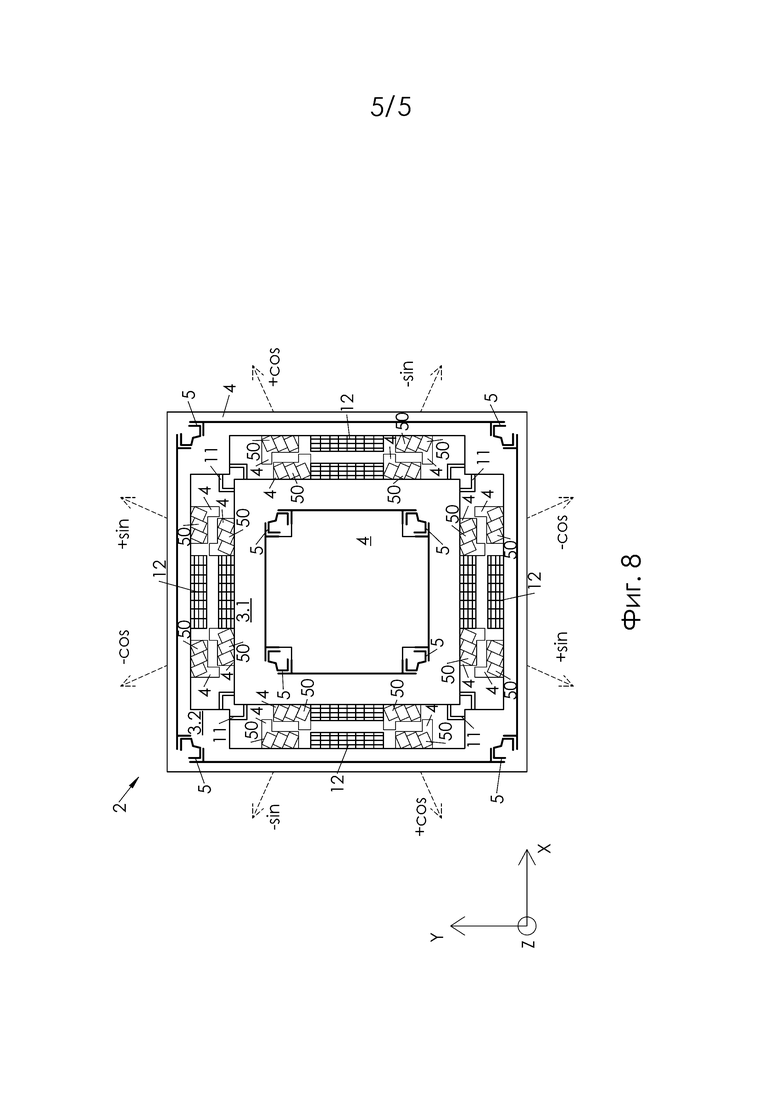
На фиг. 8 представлен другой вариант осуществления инерциального углового датчика 2, в котором топология используемых электростатических пружин 50 описывается схемой 10.1 на фиг. 5. Кроме того, в соответствии с другим возможным вариантом осуществления можно использовать топологию пружин, определяемую специфической схемой для каждой массы 3.1 и 3.2, например, схемой 10.1 для массы 3.1 и схемой 10.2 для массы 3.2 или наоборот.
В варианте осуществления датчика 2 по фиг. 7 резонатор 1 содержит две системы масса/пружина, причем первая система содержит массу 3.1 и соответствующие механические пружины 5, а вторая система содержит массу 3.1 и соответствующие механические пружины 5.
Электростатические пружины 50 имеют известную конструкцию в виде гребней электродов, зубья которых вставлены друг между другом. Гребни электростатических пружин 50 имеют рабочий режим с переменным воздушным зазором.
Это изобретение также предлагает способ коррекции жесткости резонатора 1, встроенного в инерциальный угловой датчик, как описано выше, и включающий в себя этапы:
- измерение частоты колебаний резонатора для различных ориентаций колебаний с использованием детекторов 12 деформации, расположенных между электростатическими пружинными блоками 50, как показано на фиг. 7 и фиг. 8.
- определение на основании этих измерений амплитуды анизотропии и ее ориентации, т.е. неудовлетворительной жесткости KU резонатора,
- вычисление напряжений, которые должны быть приложены к некоторым пружинам для компенсации компонентов синуса и косинуса неудовлетворительной жесткости резонатора,
- если анизотропия частоты колебаний резонатора больше заранее заданного значения, предпочтительно 1 Гц, предыдущие этапы повторяются.
Вышеуказанная процедура позволяет сделать резонатор 1, предназначенной для встраивания в инерциальный угловой датчик 2 в форме системы масса/пружина, изотропным по жесткости с помощью электрической регулировки, а не механической регулировки.

Группа изобретений относится к области вибрационных инерциальных угловых датчиков, таких как гирометр или гироскоп, а именно к резонатору 1, выполненному с возможностью встраивания в инерциальный угловой датчик. Резонатор 1 содержит по меньшей мере одну массу, подвешенную с помощью механических пружин и N пар Pi электростатических пружин 50. Резонатор 1 определяет по меньшей мере четыре оси симметрии S1, S2, S3 и S4. Каждая пара Pi состоит из двух электростатических пружин 50, каждая из которых имеет предпочтительную ось действия. Электростатические пружины 50 расположены так, что их соответствующие оси образуют прямой угол. Для по меньшей мере одной пружины одной из пар и одной пружины другой пары угол, образованный этими двумя пружинами, равен заранее заданному углу. Группа изобретений позволяет придавать жесткость изотропному резонатору во всех направлениях, в основном путем электрической регулировки. 2 н. и 6 з.п. ф-лы, 8 ил.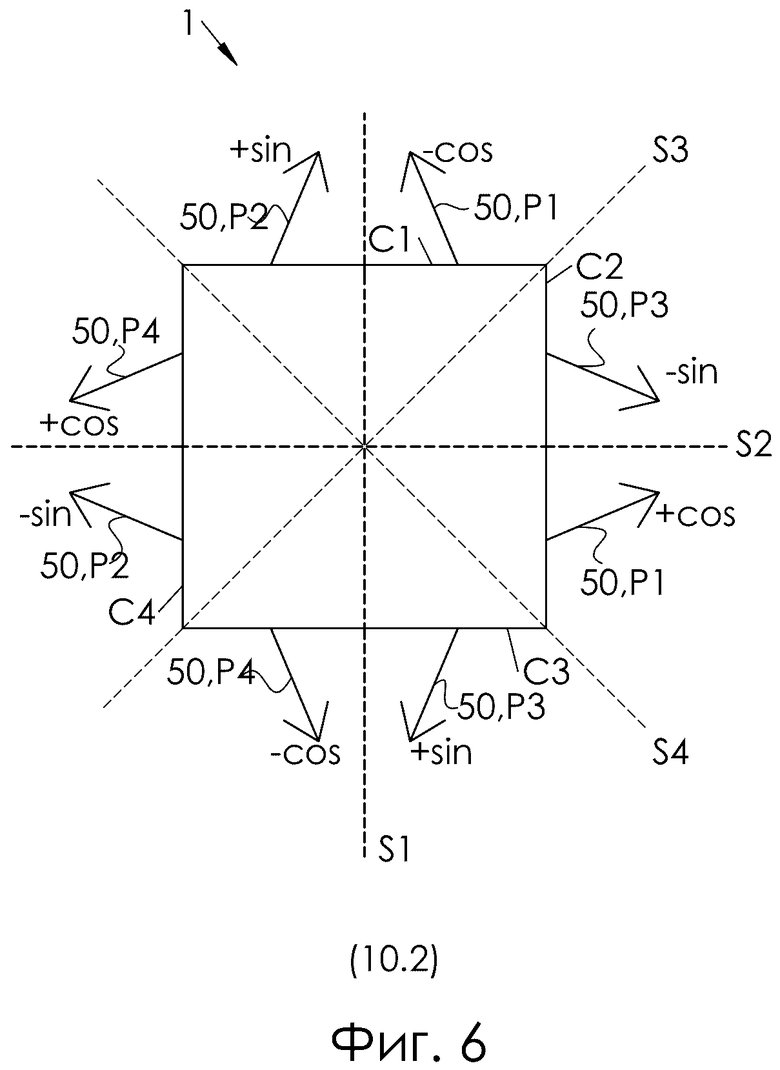
1. Инерциальный угловой датчик (2), содержащий опору (4) и резонатор (1), причем упомянутый резонатор (1) содержит по меньшей мере две массы (3), подвешенные с помощью механических пружин (5), N пар Pi (2≤i≤N) электростатических пружин (50), причем упомянутый резонатор (1) определяет по меньшей мере четыре оси S1, S2, S3 и S4 симметрии, отличающийся тем, что:
- каждая пара Pi состоит из двух электростатических пружин (50), каждая из которых имеет предпочтительную ось D действия, причем эти электростатические пружины (50) расположены так, что их соответствующие оси D образуют прямой угол,
- для по меньшей мере одной пружины любой из пар и по меньшей мере одной пружины любой другой пары угол, образованный этими двумя пружинами, равен заранее заданному углу,
при этом упомянутые две массы (3) соединены с опорой с помощью по меньшей мере некоторых из N пар электростатических пружин (50) и с помощью некоторых из механических пружин (5), причем упомянутые по меньшей мере две массы резонатора представляют собой внутреннюю массу (3.1) и внешнюю массу (3.2), соединенные между собой соединительными пружинами (11), причем каждая масса (3.1, 3.2) соединена с опорой (4) с помощью механических пружин (5), и каждая масса (3.1, 3.2) соединена с опорой (4) с помощью N электростатических пружин (50).
2. Инерциальный угловой датчик (2) по п. 1, отличающийся тем, что заранее заданный угол составляет 45 градусов.
3. Инерциальный угловой датчик (2) по одному из предыдущих пунктов, отличающийся тем, что каждая пара Pi симметрична по меньшей мере одной другой паре Pj (с j≠i) относительно по меньшей мере одной из осей симметрии S1, S2, S3 и S4 резонатора (1).
4. Инерциальный угловой датчик (2) по одному из предыдущих пунктов, отличающийся тем, что каждая пружина (50) каждой пары Рi образует угол альфа = 90/N градусов с по меньшей мере двумя из четырех осей симметрии S1, S2, S3 и S4 резонатора (1).
5. Инерциальный угловой датчик (2) по одному из пп. 1-4, отличающийся тем, что внешняя масса (3.2) имеет по существу квадратную кольцеобразную форму.
6. Инерциальный угловой датчик (2) по одному из пп. 1-5, отличающийся тем, что упомянутые массы (3.1) и (3.2) имеют одинаковые оси симметрии.
7. Способ коррекции жесткости резонатора (1), встроенного в инерциальный угловой датчик (2) по одному из пп. 1-6, включающий в себя этапы:
- измерение частот колебаний резонатора (1) для разных ориентаций колебаний с использованием детекторов (12) деформации,
- определение, на основе этих измерений, неудовлетворительной жесткости KU резонатора (1),
- вычисление, исходя из неудовлетворительной жесткости KU, напряжений, которые подлежат применению при выборе пружин (50),
- применение вычисленных напряжений для выбора пружин (50),
- повторение предыдущих этапов, если частотная анизотропия колебаний резонатора (1) превышает пороговое значение частотной анизотропии.
8. Способ по п. 7, отличающийся тем, что пороговое значение частотной анизотропии составляет 1 Гц.
| US 2016341551 A1, 24.11.2016 | |||
| Способ получения гомогенной полимерной мембраны | 1960 |
|
SU141621A1 |
| US 2004199347 A1, 07.10.2004 | |||
| FR 2983574 A1, 07.06.2013 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 1996 |
|
RU2110768C1 |

