Изобретение относится к машиностроению и может быть использовано для защиты технологического оборудования, аппаратуры и приборов от воздействия вибрации.
Известен способ воздействия на колебания, включающий создание демпфирующих сил в функции параметров колебаний, в частности в функции скорости (SU 1776896 А1, кл. F16F 15/02, 23.11.1992, БИ №43). Однако указанный способ недостаточно эффективен при воздействии на колебания в многомассовых динамических системах.
В другом способе, реализуемом в известном устройстве (RU 2184891 С2, кл. F16F 9/50, 10.07.2002, БИ №19), воздействие на колебания с целью демпфирования осуществляется путем управляемых деформаций упругого элемента, производимых в функции скорости объекта защиты. В многомассовых динамических системах указанный способ недостаточно эффективен, поскольку демпфирующее воздействие прикладывается между двумя смежными телами и при снижении колебаний одного из них колебания другого могут увеличиваться за счет влияния реактивных сил.
Наиболее близким техническим решением к предложенному является способ воздействия на колебания, реализуемый в известном устройстве (RU 2395736 С1, кл. F16F 15/03, 27.07.2010, БИ №21). Демпфирующие силы, создаваемые за счет электромагнитного воздействия в функции параметров колебаний, прикладываются между двумя смежными телами. Поскольку при этом реактивные силы, действующие на соседние тела, не уравновешиваются, данный способ недостаточно эффективен. Кроме того, способ не предусматривает возможности избирательного демпфирования колебаний отдельных тел при сохранении высоких значений амплитуд колебаний других тел, что необходимо, например, при размещении на последних технологического оборудования, использующего вибрационный эффект.
Техническим результатом изобретения является повышение эффективности воздействия на колебания многомассовой динамической системы при демпфировании или возбуждении колебаний одного или нескольких выбранных тел системы.
Технический результат достигается тем тем, что в способе воздействия на колебания, включающем создание между смежными телами системы последовательно соединенных друг с другом посредством упругих элементов тел, одно из которых упруго связано с опорой, демпфирующих сил, дополнительно создают силы, равные по величине и направлению демпфирующей или возбуждающей силе, прикладываемой между выбранным для демпфирования или возбуждения колебаний телом и смежным с ним со стороны опоры телом, причем дополнительные силы создают между всеми смежными телами, начиная от тела, ближайшего к выбранному со стороны опоры, и кончая ближайшим к опоре телом.
Указанные демпфирующие, возбуждающие и дополнительные силы создают либо путем деформирования упругих элементов, осуществляемого при помощи установленных последовательно с упругими элементами гидроцилиндров, управляемых по перемещению в функции параметров колебаний, либо путем электромагнитного воздействия, создаваемого при помощи установленных параллельно упругим элементам соленоидов или линейных электродвигателей, управляемых по тяговому усилию в функции параметров колебаний.
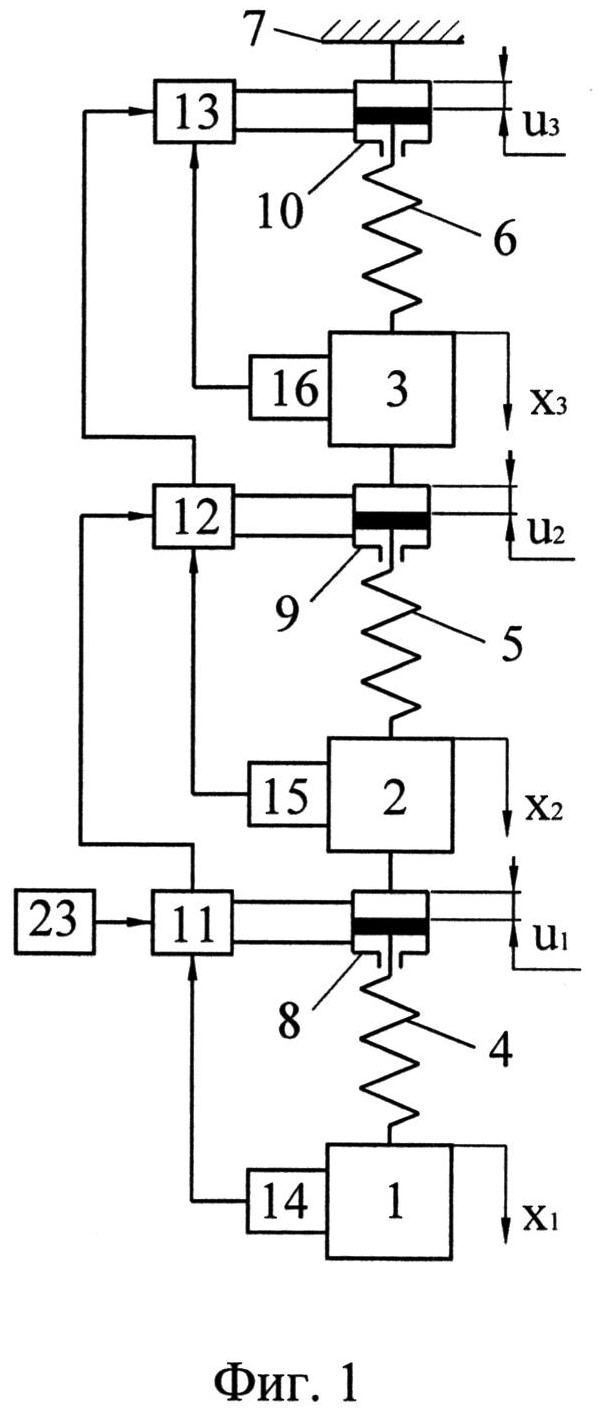
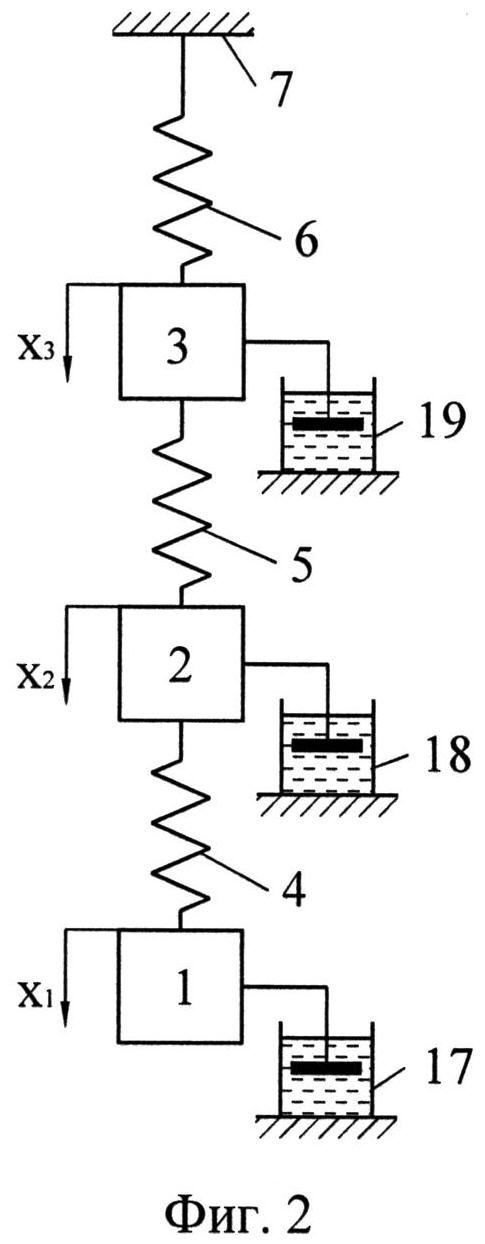
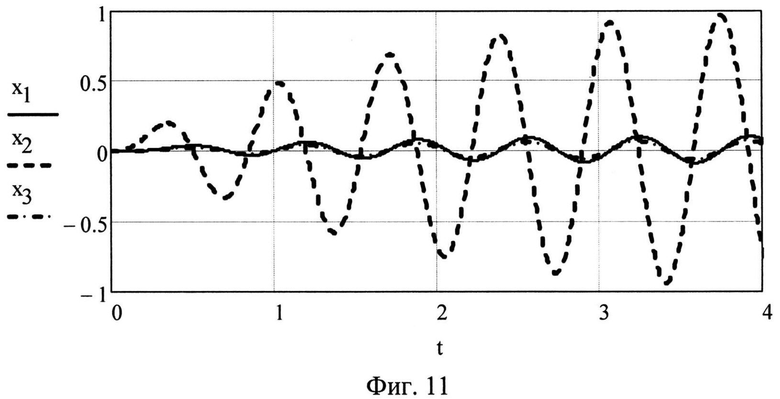
На фиг.1 представлена динамическая модель системы, реализующей предложенный способ воздействия на колебания с использованием гидроцилиндров, на фиг.2 - динамическая модель эквивалентной системы, иллюстрирующая эффект внешнего демпфирующего воздействия, достигаемый при использовании предложенного способа, на фиг.3 приведен вариант реализации предложенного способа с использованием соленоидов или линейных электродвигателей, на фиг.4 показаны графики затухающих колебаний при использовании известного способа демпфирования, на фиг.5 - аналогичные графики при использовании предложенного способа, на фиг.6 приведены амплитудно-частотные характеристики при демпфировании по известному способу, на фиг.7 - аналогичные характеристики при использовании предложенного способа, на фиг.8, 9, 10 представлены графики колебаний при избирательном воздействии соответственно на тела 1, 2, 3 с использованием эффекта внешнего сопротивления движению указанных тел по закону сухого трения, на фиг.11 - график для случая возбуждения резонансных колебаний тела 2 и одновременного подавления колебаний тел 1, 2.
Способ воздействия на колебания рассматривается в двух вариантах реализации на примере трехмассовой динамической системы (фиг. 1), состоящей из тел 1, 2, 3, соединенных друг с другом посредством упругих элементов 4, 5, 6. Тело 3 при помощи упругого элемента 6 связано с опорой 7. В первом варианте реализации предложенного способа гидроцилиндры 8, 9, 10 установлены последовательно с упругими элементами и связаны с выходами блоков управления 11, 12, 13 соответственно. Датчики колебаний (акселерометры) 14, 15, 16 подключены к первым входам блоков управления 11, 12, 13 соответственно. Вторые входы блоков управления 12, 13 подключены к выходам блоков управления 11, 12 соответственно. Демпферы 17, 18, 19 (фиг. 2), условно установленные на эквивалентной схеме между неподвижным основанием и телами, иллюстрируют эффект внешнего сопротивления колебаниям, достигаемый при использовании предложенного способа. К входам блоков управления могут быть подключены генераторы сигналов 23 возбуждающего воздействия (на чертежах показан только один).
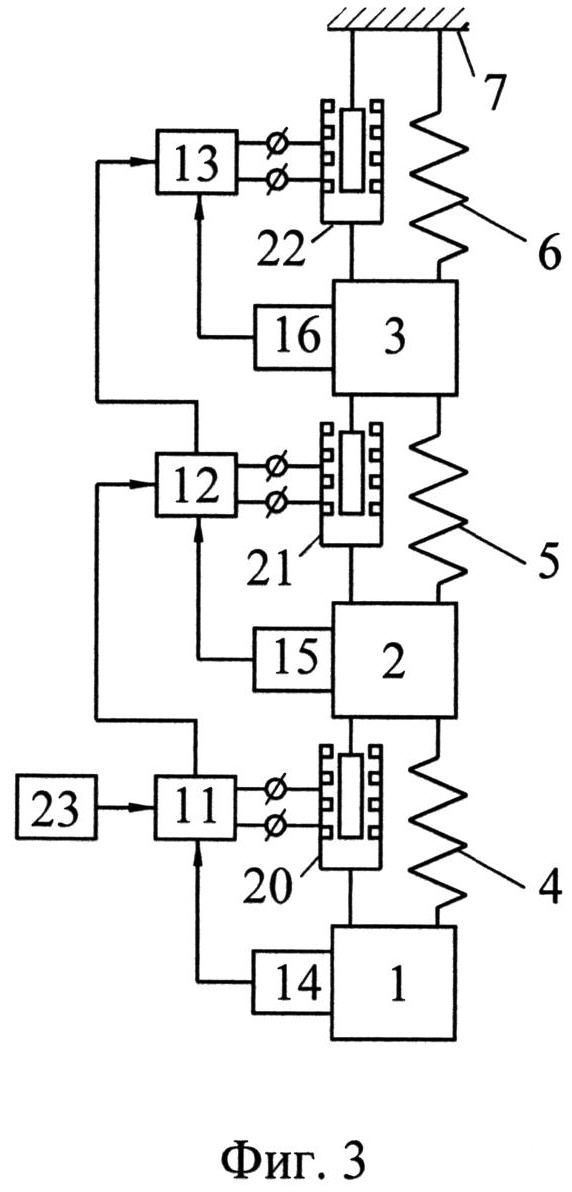
Во втором варианте реализации предложенного способа (фиг, 3) соленоиды (или линейные электродвигатели) 20, 21, 22 установлены между смежными телами параллельно упругим элементам и связаны с соответствующими выходами блоков управления. Состав и обозначения остальных элементов соответствует первому варианту реализации способа (фиг. 1).
Далее использованы следующие обозначения:
х1, х2, х 3 - перемещения тел 1, 2, 3 соответственно;



m1, m2, m3 - массы колеблющихся тел;
c1, c2, c3 - жесткости упругих элементов 4, 5, 6 соответственно;
u1, u2, u3 - управляемые деформации упругих элементов 4, 5, 6 соответственно;
k1, k2, k3 - коэффициенты демпфирования.
Способ воздействия на колебания с целью их демпфирования для варианта реализации, соответствующего фиг.1, осуществляют следующим образом.
Колебания тел, например, тела 1, выбранного для демпфирования, фиксируются акселерометром 14, сигнал от которого поступает на вход блока управления 11, где он интегрируется и затем отрабатывается по перемещению u1 гидроцилиндром 8. В результате в упругом элементе 4 за счет его деформации u1 создается сила, пропорциональная и противоположно направленная скорости движения выбранного тела 1, что оказывает демпфирующее воздействие на его колебания. При этом, однако, со стороны того же упругого элемента 4 к смежному телу 2 прикладывается реактивная сила, которая усиливает колебания как тела 2, так и всей системы в целом, включая выбранное тело 1, что ослабляет эффект демпфирования последнего.
С целью компенсации действия указанной реактивной силы и повышения степени демпфирования колебаний выбранного тела 1 в упругом элементе 5 за счет его деформации u2, производимой при помощи гидроцилиндра 9, дополнительно создают силу, равную по величине и направлению демпфирующей силе, возникающей в упругом элементе 4 при его деформации u1. Осуществляется это по сигналу, поступающему с выхода блока управления 11 на второй вход блока управления 12. В результате, силы, действующие с разных сторон на тело 2, уравновешивают друг друга и не влияют на его колебания. В свою очередь, действие на тело 3 дополнительно созданной в упругом элементе 5 силы компенсируется равной ей силой, создаваемой в упругом элементе 6 путем его деформации u3, производимой при помощи гидроцилиндра 10. Осуществляется это по сигналу, поступающему с выхода блока управления 12 на второй вход блока управления 13. Реактивное усилие, возникающее при деформации u3, воспринимается опорой 7.
В итоге, реактивное усилие, возникшее в упругом элементе 4 за счет его деформации u1 при создании демпфирующей силы, приложенной к выбранному телу 1, последовательно через упругие элементы 5, 6 передается на опору 7, не оказывая влияния на колебания тел 2, 3. При этом на выбранное тело 1 действует лишь сила, пропорциональная и противоположно направленная абсолютной скорости его движения, что создает эффект приложения внешней демпфирующей силы к этому телу.
Подобным образом осуществляют способ воздействия на колебания с целью их демпфирования для варианта реализации, соответствующего фиг.3. Отличие от предыдущего варианта в этом случае состоит в том, что отработка заданных усилий производится при помощи соленоидов (или линейных электродвигателей) 20, 21, 22, создающих тяговые усилия в функции сигналов, вырабатываемых блоками управления 11, 12, 13 соответственно.
Аналогично осуществляют демпфирование колебаний любых других тел в отдельности или всех тел системы одновременно. В последнем случае усилия в упругих элементах, равные произведению величин их жесткости и деформации, создают исходя из зависимостей:


В общем случае в механической системе, включающей n последовательно соединенных упругими элементами тел, усилия, создаваемые i-м упругом элементе (i=1…n отсчитывается по направлению от концевого тела к опоре), формируются по закону:

Если i-е тело не подвергается демпфированию, то ki=0.
Зависимости (1), (2) можно подтвердить следующим образом.
Уравнения колебаний динамической системы, представленной на фиг.1, имеют вид:
где положительные значения u1, u2, u3 соответствуют сжатию упругих элементов. В уравнениях (3) выделим члены, содержащие u1, u2, u3:

Уравнения колебаний для эквивалентной динамической системы, реализующей эффект внешнего вязкого сопротивления (фиг. 2):

Из сравнения уравнений (4) и (5) следует, что для обеспечения эффекта внешнего вязкого сопротивления движению тел в исходной системе (фиг. 1) должны быть выполнены следующие условия:

Из (6) получаем искомые законы управления деформациями упругих элементов:
Уравнения (6) и (7) тождественны зависимостям (1) и (2), что свидетельствует о правомерности тех и других.
Достоинством данного способа является то, что путем создания внутренних усилий, действующих между элементами динамической системы, осуществляют эффект внешнего демпфирующего воздействия на систему, воспроизводимого, например, при помощи демпферов вязкого сопротивления 17, 18, 19, связанных с неподвижным основанием (фиг. 2). При этом степень демпфирования задают величинами k1, k2, k3, значения которых ограничиваются лишь помехоустойчивостью контура "датчик колебаний - блок управления - гидроцилиндр - колеблющееся тело".
Одним из преимуществ эффекта внешнего демпфирующего воздействия по сравнению с демпфированием силами внутреннего сопротивления, например, вязкого, является то, что при кинематическом возбуждении передача колебаний от опоры на объект защиты, а также между телами уменьшается за счет отсутствия эффекта шунтирования упругих элементов вязкими, через которые происходит передача вибрации, в особенности, высокочастотной, поскольку при большом коэффициенте внутреннего сопротивления вязкий элемент по своим свойствам приближается к твердому телу. Кроме того, способ позволяет воздействовать на колебания в случае невозможности непосредственного контакта с движущимся телом, например с рабочим органом экскаватора, или при размещении колебательной системы в опасной для человека зоне.
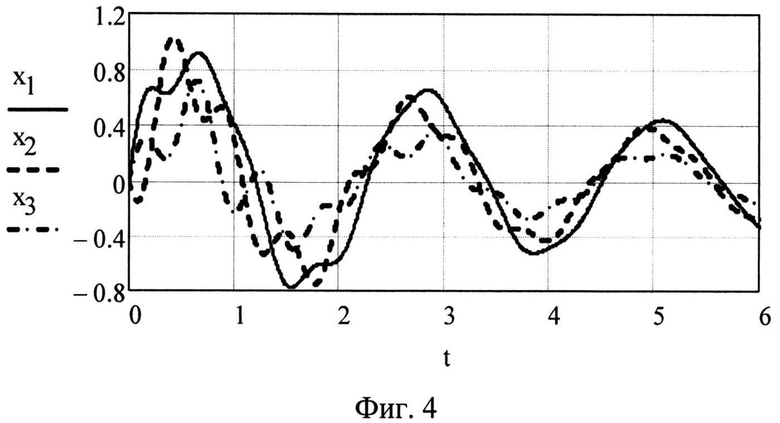
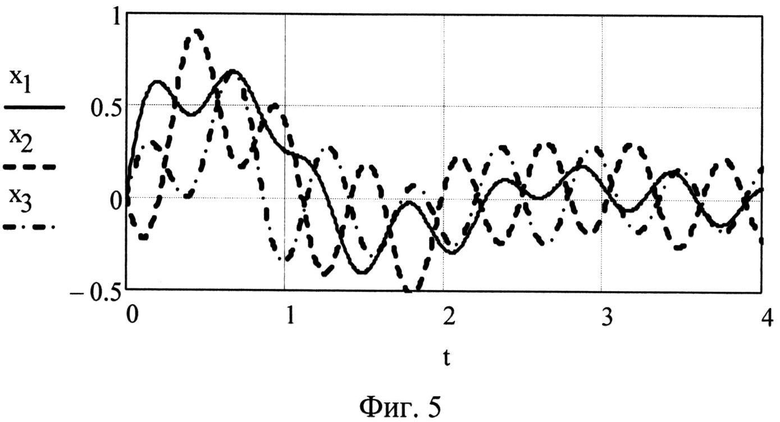
По сравнению с известным техническим решением (кривая х1 перемещения во времени t тела 1 на фиг. 4) предложенный способ (кривая х1 на фиг. 5) обеспечивает эффективное подавление основной (в данном случае низкочастотной) составляющей колебаний выбранного для демпфирования тела, в то время как высокочастотные составляющие, проявляющиеся главным образом в перемещениях остальных тел, практически не демпфируются, что подтверждает свойство избирательности демпфирования при использовании предложенного способа (значения х1, х2, х3 на всех графиках колебаний даны в условных единицах, t - время, отнесенное к периоду колебаний парциальной системы).
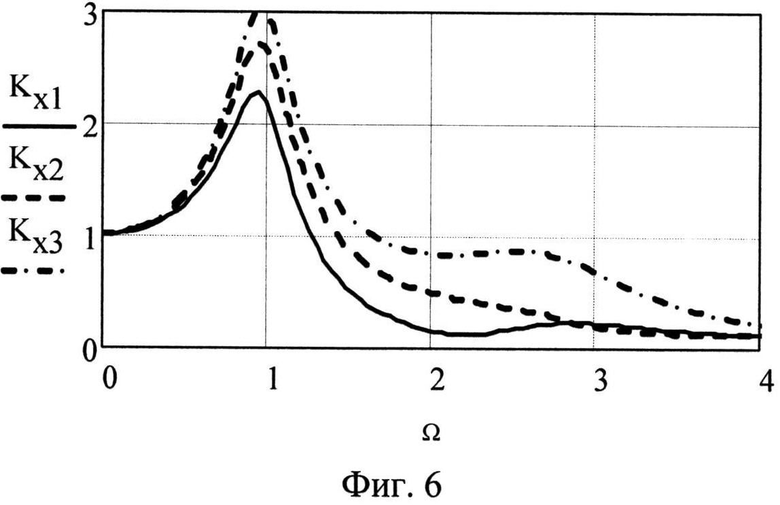
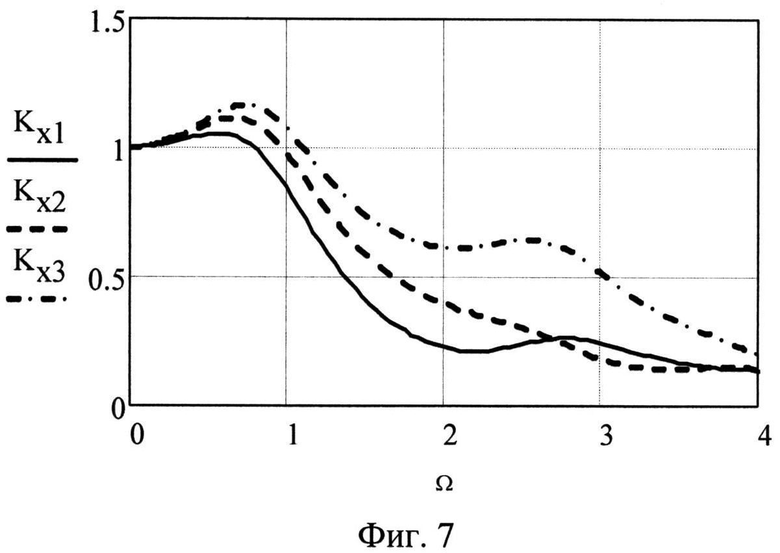
При одновременном демпфирования колебаний всех тел использование предложенного способа (фиг. 7) позволяет снизить резонансные пики амплитуд по сравнению с известным решением (фиг. 6) в несколько раз.
На фиг. 6, 7 обозначено:
Кx1, Кx2, Кx3 - коэффициенты динамичности по перемещениям тел 1, 2, 3 соответственно;
Ω - отношение частоты вынуждающей силы к низшей собственной частоте колебаний механической системы.
Результаты математического моделирования, представленные на фиг. 4, 5, 6, 7, получены при одинаковых значениях k1, k2, k3 для всех случаев.
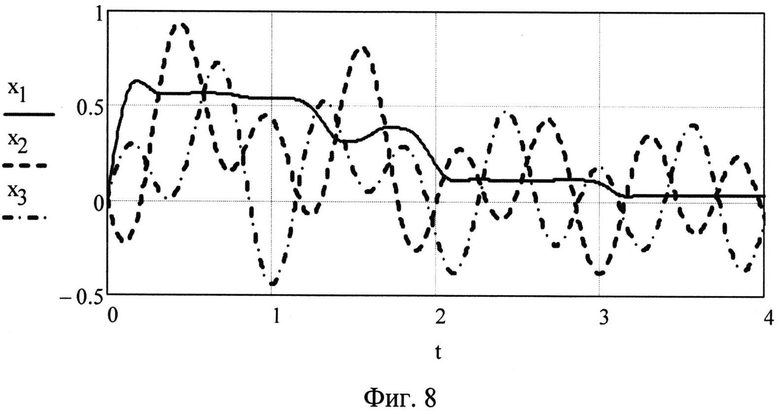
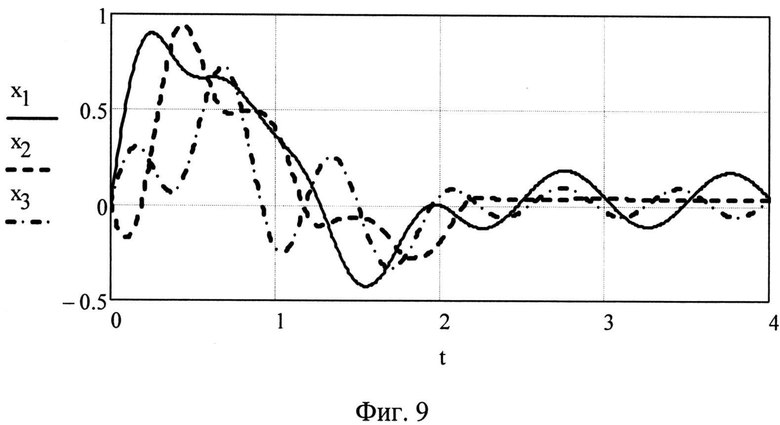
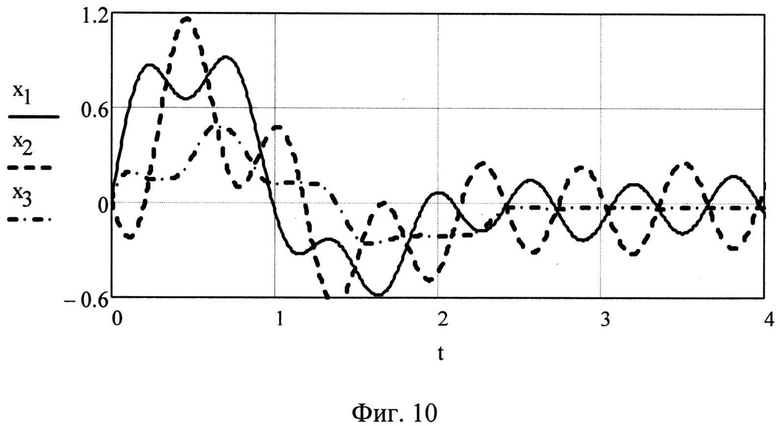
При избирательном демпфировании с использованием эффекта внешнего сопротивления, заданного по закону сухого трения, колебания х1, х2, х3 отдельных тел (фиг. 8, 9, 10 соответственно) могут быть полностью подавлены при сохранении колебаний остальных тел.
Предложенный способ позволяет также возбуждать колебания, в том числе резонансные, отдельных тел системы (в частности, тела 2 на фиг. 11) при одновременном подавлении колебаний остальных тел. Это необходимо, например, при размещении на отдельных телах динамической системы технологического оборудования, использующего вибрационный эффект (вибромолоты, вибропогружатели свай, роботы-манипуляторы).
Способ воздействия на колебания с целью их возбуждения осуществляют подобно тому, как это производят с целью демпфирования. При этом вместо демпфирующей силы между смежными телами, например телами 1 и 2, прикладывается возбуждающая сила в функции времени fi(t), создаваемая гидроцилиндром 8 при помощи блока управления 11 в соответствии с сигналом, формируемым генератором сигналов 23.
В этом случае формула (2) принимает вид:

Если i-e тело не подвергается демпфированию, а к нему приложена возбуждающая сила fi(t), то ki=0. В противном случае fi(t)=0, ki≠0.
Возможность одновременного возбуждения колебаний одних тел системы и демпфирования колебаний других основана на принципе суперпозиции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ демпфирования колебаний и устройство для его осуществления | 1990 |
|
SU1776896A1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ УПРУГОПОДВЕШЕННОГО ОБЪЕКТА | 1999 |
|
RU2162034C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2118683C1 |
| ДЕФОРМИРУЕМОЕ ЗЕРКАЛО | 1984 |
|
SU1841112A1 |
| СПОСОБ ЗАЩИТЫ ЭКСКАВАТОРА ОТ ВОЗДЕЙСТВИЙ ГИДРОМОЛОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2343246C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| СПОСОБ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ И ТОПЛИВНЫЕ СИСТЕМЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2042859C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕМПФИРУЮЩИХ СВОЙСТВ АМОРТИЗАТОРОВ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ ПРИ УДАРНЫХ ВОЗДЕЙСТВИЯХ | 1996 |
|
RU2152016C1 |
| ДВУХКООРДИНАТНЫЙ ВИБРОСТЕНД | 1993 |
|
RU2116639C1 |
Изобретение относится к области машиностроения. Способ включает создание между смежными телами системы последовательно соединенных друг с другом посредством упругих элементов тел, одно из которых упруго связано с опорой. Создают силы, равные по величине и направлению демпфирующей или возбуждающей силе, прикладываемой между выбранным для демпфирования или возбуждения колебаний телом и смежным с ним со стороны опоры телом. Дополнительные силы создают между всеми смежными телами, начиная от ближайшего тела к выбранному со стороны опоры и кончая ближайшим к опоре телом. Демпфирующие, возбуждающие и дополнительные силы создают путем деформирования упругих элементов или электромагнитным воздействием. Деформирование упругих элементов осуществляют при помощи установленных последовательно с упругими элементами гидроцилиндров. Электромагнитное воздействие создают при помощи установленных параллельно упругим элементам соленоидов или линейных электродвигателей. Достигается эффективное воздействие на колебания многомассовой динамической системы при демпфировании или возбуждении колебаний одного или нескольких выбранных тел системы. 2 з.п. ф-лы, 11 ил.
1. Способ воздействия на колебания, включающий создание между смежными телами системы последовательно соединенных друг с другом посредством упругих элементов тел, одно из которых упруго связано с опорой, демпфирующих сил, отличающийся тем, что дополнительно создают силы, равные по величине и направлению демпфирующей или возбуждающей силе, прикладываемой между выбранным для демпфирования или возбуждения колебаний телом и смежным с ним со стороны опоры телом, причем дополнительные силы создают между всеми смежными телами, начиная от тела, ближайшего к выбранному со стороны опоры, и кончая ближайшим к опоре телом.
2. Способ воздействия на колебания по п. 1, отличающийся тем, что демпфирующие, возбуждающие и дополнительные силы создают путем деформаций упругих элементов, осуществляемых при помощи установленных последовательно с упругими элементами гидроцилиндров, управляемых по перемещению.
3. Способ воздействия на колебания по п. 1, отличающийся тем, что демпфирующие, возбуждающие и дополнительные силы создают посредством электромагнитного воздействия, реализуемого при помощи установленных параллельно с упругими элементами соленоидов или линейных электродвигателей, управляемых по тяговому усилию.
| АКТИВНЫЙ ИЗОЛЯТОР ИСТОЧНИКОВ ВИБРАЦИЙ | 2008 |
|
RU2395736C1 |

