Изобретение относится к области машиностроения, а именно к средствам виброзащиты, и может быть использовано в горных, строительных и других машинах.
Наиболее близким по технической сущности и достигаемому результату является способ демпфирования колебаний объекта на упругом подвесе, заключающийся в измерении параметров колебаний объекта и приложении к нему посредством демпфирующего элемента силы в функции колебательной скорости объекта. Однако при использовании известного способа максимум силы, приложенной к объекту со стороны демпфирующего элемента, не уменьшается ниже значения, определяемого произведением амплитуды
колебаний объекта на жесткость подвеса.
Известно устройство для демпфирования колебаний, содержащее гидроцилиндр, установленный между основанием и защищаемым объектом, две пневмогидравлические камеры, каждая из которых сообщена с одной из рабочих полостей гидроцилиндра, гидрораспределитель, являющийся выходным звеном системы управления, включающей акселерометр, выход которого через усилительный блок связан с обмоткой гидрораспределителя. Однако в известном устройстве не достигается компенсация упругой составляющей усилия, действующего на объект со стороны демпфирующего элемента.
XI
VI
О 00
SO
о
Цель изобретения - уменьшение усилия демпфирования, действующего на объект со стороны демпфирующего элемента.
Указанная цель достигается тем, что, согласно способу демпфирования колебаний объекта на упругом подвесе, заключающемуся в измерении параметров колебаний объекта и приложении к нему посредством демпфирующего элемента силы в функции колебательной скорости объекта, на объекте посредством демпфирующего элемента создают силу, пропорциональную колебательному перемещению объекта в функции этого перемещения,
С этой же целью в устройстве для демпфирования колебаний, содержаа(ем гидроцилиндр, установленный между основанием и защищаемым объектом, две пневмогидравлические камеры, каждая из которых сообщена с одной из рабочих полостей гидроцилиндра, гидрораспределитель, являющийся выходным звеном системы управления, включающей акселерометр, выход которого через усилительный блок связан с обмоткой гидрораспределителя, гидроцилиндр имеет дополнительную рабочую полость, каждая из двух рабочих линий гидрораспределителя подключена к одной из основных рабочих полостей гидроцилиндра, а устройство снабжено интегрирующим блоком, установленным в системе управления между акселерометром и усилительным блоком, дополнительной пневмо- гидравлической камерой, сообщенной с дополнительной рабочей полостью гидроцилиндра, и дросселем, установленным между рабочими линиями, пропускная способность которого в 15-20 раз меньше пропускной способности рабочих линий гидрораспределителя.
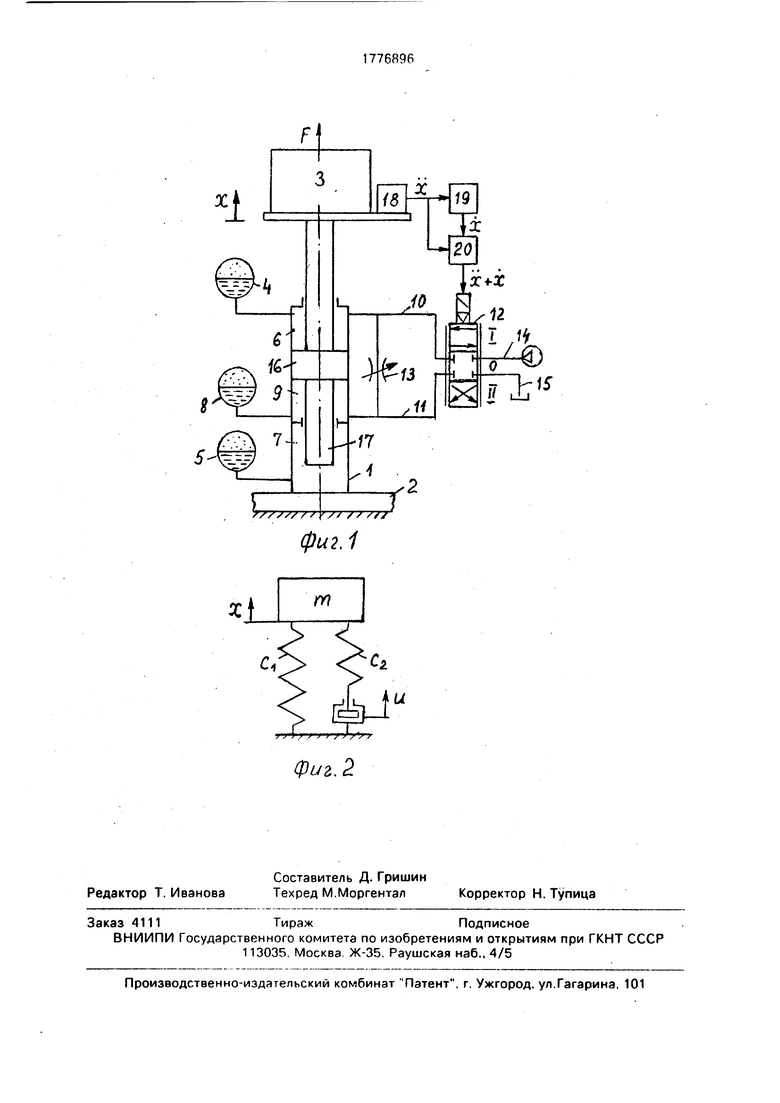
На фиг.1 изображена схема устройства для осуществления предложенного способа демпфирования колебаний; на фиг.2 - схема эквивалентной динамической системы,
Устройство содержит гидроцилиндр 1, установленный между основанием 2 и защищаемым объектом 3. Пневмогидравлические камеры 4, 5 сообщаются соответственно с рабочими полостями 6, 7 гидроцилиндра, а дополнительная пневмо- гидравлическая камера 8 сообщается с дополнительной рабочей полостью 9. Рабочие линии 10, 11 гидрораспределителя 12 подключены к полостям 6, 9 гидроцилиндра, а между указанными линиями установлен дроссель 13. Линия 14 является напорной, линия 15 - сливной. Поршень 16 отделяет друг от друга рабочие полости 6 и 9. Плунжерная часть штока 17 размещена в полости 7. Система управления включает в себя
акселерометр 18, выход которого через интегрирующий и усилительный блоки 19, 20 связан с обмоткой управления гидрораспределителя 12.
Функционально устройство делится на
3 части. Полость 7 с размещенной в ней плунжерной частью штока 17, а также пнев- могидравлическая камера 5 образую упругий подвес объекта 3. Поршень 16, рабочие
0 полости 6, 9 и подключенные к ним пневмогидравлические камеры 4, 8 составляют демпфирующий элемент. Остальные узлы предназначены для формирования силового воздействия на объект посредством де5 мпфирующего элемента.
Устройство работает следующим образом. При отсутствии колебаний сигналы на выходе акселерометра 18 и выходах блоков 19, 20 отсутствуют, обмотка гидрораспре0 делмтеля 12 не возбуждена, и золотник гидрораспределителя 12 находиуся в среднем положении 0, когда рабочие линии 10, 11 заперты. Под действием веса объекта 3 шток 17 занимает положение статического
5 равновесия, определяемое степенью сжатия газа в пневмогидравлической камере 5. При этом вся внешняя статическая нагрузка на шток 17 уравновешивается давлением жидкости, действующей на плунжерную
0 часть штока, находящуюся в полости 7, поскольку дроссель 13 малого сечения обеспечивает практическое равенство давлений в полостях 6, 9 при медленном изменении статической нагрузки, благодаря чему силы.
5 действующие на поршень 16с разных сторон, при отсутствии колебаний равны (под медленным изменением нагрузки в данном случае подразумевается изменение, протекающее за время, в 10 и более раз превыша0 ющее период колебаний объекта).
При колебаниях объекта 3, вызванных, например, силовым воздействием F, на выходе акселерометра 18 появляется электрический сигнал х, поступающий через
5 усилительный блок 20 на обмотку гидрораспределителя 12. Например, при движении объекта 3 вверх полярность поступающего на обмотку гидрораспределителя управляющего сигнала У такова, что гидрораспре0 делитель 12 занимает положение Т, когда жидкость подается через линию 10 в полость 6, а из полости 9 через линию 11 сливается. В результате давление в пневмогидравлической камере 4 и рабочей полости
5 6 возрастает, а в пневмогидравлической камере 8 и рабочей полости 9 уменьшается. На поршне 16 создается усилие, препятствующее колебательному движению обьекта 3 вверх. Аналогичным образом при движении объекта вниз гидрораспределитель 12 занимает положение II. жидкость подается через линию 11 в полость 9, а из полости 6 через линию 10 сливается. В результате на поршне 16 создается усилие, препятствующее колебательному движению объекта 3 вниз,
Дросселирующий гидрораспределитель 12 обеспечивает пропорциональность расхода жидкости в линиях 10, 11 величине управляющего электрического сигнала. Ко- личество жидкости, наполняющей через линии 10,11 пневмогидравлические камеры 4. 8,пропорционально как расходу, так и времени, и, следовательно, оно пропорционально интегралу от управляющего электрического сигнала V, являющегося аналогом колебательного ускорения, т.е. оно в конечном счете пропорционально колебательной скорости х объекта 3. Изменение наполнения пневмогидравлических камер 4, 8 при колебаниях объекта 3 приводит к соответствующему изменению давлений в рабочих полостях 6, 9 и появлению на поршне 16 демпфирующей силы, пропорциональной и противоположно направленной колебательной скорости объекта 3, что, как известно из теории колебаний, является необходимым условием демпфирования.
Относительное перемещение штока 17 и гидроцилиндра 1 при колебаниях приво- дит к изменению объемов рабочих полостей 6, 9 гидроцилиндра 1 и сообщающихся с ними газовых полостей пневмогидравлических камер 4, 8. В результате возникает разность давлений в рабочих полостях 6. 9 гидроцилиндра 1, что эквивалентно возникновению на поршне 16 дополнительного усилия. В известном устройстве это приводит к увеличению усилия демпфирования, действующего на объект со стороны де- мпфирующего элемента
В предложенном устройстве выходной сигнал х акселерометра 18 преобразуется в интегрирующем блоке 19 в сигнал х и после усилительного блока 20 направляется на об- мотку управления гидрораспределителя 12. Благодаря вышеотмеченному интегрирующему свойству на поршне 16 создается усилие, пропорциональное интегралу от х т.е. пропорциональное перемещению х объекта 3. Это усилие компенсирует указанное усилие, создаваемое разностью давлений в пневмогидравлических камерах 4, 8, уменьшая тем самым как нагруженность самого демпфирующего элемента так и усилие. действующее на объект со стороны демпфирующего элемента.
На фиг.2 обозначено: х - колебательное перемещение объекта m - масса объекта: ci - жесткость упругого подвеса, С2 жесткость демпфирующего элемента; и - деформация демпфирующего элемента, осуществляемая для создания демпфирующего воздействия. В устройстве на фиг.1 этой деформации соответствует изменение объема газовых камер 4, 8 при подаче жидкости по рабочим линиям 10, 11. Уравнение свободных колебаний объекта с учетом демпфирующего воздействия:
а с(х + и) О,
(D
При демпфировании в функции колебательной скорости объекта
и kx,
(2)
где к - коэффициент пропорциональности. С учетом (2) уравнение (1) в стандартной форме имеет вид
-Ј-: 2 п
х+ оЈх+2пх 0,
«S к-.
(3)
2(
п
k
JZWoCC
д - заданный декремент колебаний.
Третий член уравнения (1) представляет собой усилие, действующее на объект со стороны демпфирующего элемента:
Fj а с(х + и) а с( х+ kx)
(4)
Максимальное значение (модуль) данного усилия:
IF V|x|2+k2 ,|2
Ixl v
1 +
б
(5)
па
где I х I - амплитуда перемещения объекта;
- амплитуда его скорости.
Уравнение колебаний объекта при демпфировании по предложенному способу:
тх + сх + а с(х +
(6)
где для удобства сопоставимости результатов принято
ci с;
При этом эффективная жесткость подвеса, а следовательно, и собственная частота колебаний объекта в сравниваемых случаях одинакова.
Жесткость ci определяется как отношение приращения усилия на штоке 17 к приращению его перемещения за счет сжимаемости газа в пневмогидравлической полости 5, а жесткость С2, как приращение усилия на том же штоке к приращению его перемещения за счет сжимаемости газа в пневмогидравлических полостях 4, 8.
При создании на объекте посредством демпфирующего элемента силы, пропорциональной колебательному перемещению объекта в функции этого перемещения, выражение (2) принимает вид:
u kx - х.
С учетом (7) третий член уравнения (6). представляющий собой усилие, действующее на объект со стороны демпфирующего элемента, получает вид: F a ckx, а его максимальное значение:
IFS
:с5г х|
Сравнение (5) и (8) показывает, что например, при а 1; д 11 FЈ I /1F I 3,3 т.е. использование предложенного способа и устройства для его осуществления позволяет в данном примере уменьшить усилие, действующее на объект со стороны демпфирующего элемента, в 3,3 раза при сохранении заданной степени демпфирования. Дополнительным положительным эффектом является также соответствующее уменьшение давления в гидросистеме и повышение надежности устройства.
Формула изобретения 1. Способ демпфирования колебаний объекта на упругом подвесе, заключающийся в измерении параметров колебаний объ5 екта и приложении к нему посредством демпфирующего: элемента силы в функции колебательной скорости объекта, отличающийся тем, что, с целью уменьшения усилия демпфирования, действующего на
10 объект со стороны демпфирующего элемента, на объекте посредством демпфирующего элемента создают силу, пропорциональную колебательному перемещению объекта в функции этого перемещения.
15 2. Устройство для демпфирования колебаний, содержащее гидроцилиндр, устанавливаемый между основанием и защищаемым объектом, две пневмогид- равлические камеры, каждая из которых со20 общена с одной из рабочих полостей гидроцилиндра, гидрораспределитель, являющийся выходным звеном системы управления, включающей акселерометр, выход которого через усилительный блок
25 связан с обмоткой гидрораспределителя,отличающееся тем, что гидроцилиндр имеет дополнительную рабочую полость, каждая из двух рабочих линий гидрораспределителя подключена к одной из
30 основных рабочих полостей гидроцилиндра, а устройство снабжено интегрирующим блоком, установленным в системе управления между акселерометром и усилительным блоком, дополнительной пнев35 могидравлической камерой, сообщенной с дополнительной рабочей полостью гидроцилиндра и дросселем, установленным между рабочими линиями, пропуская способность которого в 10-20 раз меньше
40 пропускной способности рабочих линий гидрораспределителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демпфирования колебаний металлоконструкций роторного экскаватора | 1986 |
|
SU1452887A1 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1985 |
|
SU1271941A1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА КОЛЕБАНИЯ | 2014 |
|
RU2567719C1 |
| Гидропривод мобильной машины | 1988 |
|
SU1643810A1 |
| Землеройно-транспортная машина | 1988 |
|
SU1640294A1 |
| Устройство для гашения колебаний металлоконструкций роторного экскаватора | 1987 |
|
SU1474222A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Роторный экскаватор | 1985 |
|
SU1271942A1 |
| Устройство для установки грузоподъемного механизма на транспортное средство | 1986 |
|
SU1444191A1 |
Использование: машиностроение, а именно средства виброзащиты. Сущность изобретения: способ демпфирования колебаний объекта на упругом подвесе заключается в измерении параметров колебаний объекта, в приложении к нему посредством демпфирующего элемента силы в функции колебательной скорости объекта и создании силы, пропорциональной колебательному перемещению объекта в функции этого перемещения. Устройство для осуществления способа демпфирования содержит гидроцилиндр с двумя основными и дополнительной рабочими полостями, сообщенные с каждой соответствующие пневмогидравлические камеры, гидрораспределитель и систему управления, включающую акселерометр, усилительный и интегрирующий блоки. Каждая из двух рабочих линий гидрораспределителя подключена к одной из основных рабочих полостей гидроцилиндра. Между рабочими линиями установлен дроссель. 2 с.п, ф-лы, 2 ил. v Ё
()U2.1
фиг. 2
| Способ гашения колебаний | 1978 |
|
SU763628A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Активная пневмогидравлическая подвеска транспортного средства | 1980 |
|
SU901087A1 |
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
