Область техники
Настоящее изобретение относится к двигательной и передающей движение системам, в частности, для винтокрылых летательных аппаратов и для передачи движения на один или более роторы, установленные на них.
Предшествующий уровень техники
Винтокрылые летательные аппараты широко применяются в гражданской и военной областях благодаря их универсальности и способности выполнять маневры, недоступные для летательных аппаратов с фиксированным крылом.
В области техники, относящейся к винтокрылому полету, в качестве двигательной и передающей движение сборки чаще всего используют гидромашины, например поршневой двигатель внутреннего сгорания или газовую турбину, в сочетании с механической трансмиссией, соединенной с ротором.
Однако, особенно в летательных аппаратах, в которых двигателем является единственная газовая турбина, если она перестает функционировать в результате отказа, последующим быстрым спуском летательного аппарата на землю можно управлять только благодаря авторотации ротора.
Для гарантирования безопасности пассажиров летательного аппарата даже в случае отказа, двигательные установки обычно содержат два или более блоков двигателя, соединенных с ротором, мощность которых избыточна относительно требований нормального полета так, что в случае отказа одного из них еще функционирующий блок двигателя способен поддерживать летательный аппарат в полете, восполняя мощность, потерянную в результате отказа одного из блоков двигателей.
Однако не всегда возможно иметь доступную избыточную двигательную сборку, поскольку на многих летательных аппаратах по причинам, связанным со снижением веса и габаритов, по существу невозможно установить более чем один блок двигателя. В этом случае, в случае отказа, единственная возможность управлять летательным аппаратом, как было указано выше, зависит от авторотации ротора. Поэтому на практике полеты над населенными пунктами вертолетам с единственной турбиной запрещены специальными правилами.
Кроме того, если винтокрылый летательный аппарат не является вертолетом традиционного типа, а транспортным средством, оснащенным колесами для движения по земле и на котором установлен летающий модуль (транспортные средства такого типа известны, например, из документов GB-A-908691 и GB-A-938686), очевидно, что в дополнение к требованиям избыточности, типичным для любой задачи по аэронавтике, еще более важной является необходимость в грузоподъемности и в создании системы, которая была бы как можно более компактной и могла легко устанавливаться.
Кроме того, нельзя забывать, что наиболее широкое распространение в настоящее время получили газовые турбины, которые выполняются в качестве блоков двигателя на почти всех винтокрылых летательных аппаратах, что приводит к хорошо известной череде проблем их управления. Из-за трудностей с управлением газовыми турбинами изменение подъемной силы на лопастях ротора по существу получают за счет изменения общего шага, а не за счет изменения частоты вращения турбины (или турбин), которая по существу работает с постоянной частотой вращения.
Это налагает ограничения на максимальную скорость перемещения летательного аппарата, поскольку, как известно специалистам в данной области, в условиях околозвукового потока текучей среды относительно лопасти возникает опасная вибрация (околозвуковой флаттер). Поскольку относительная скорость потока текучей среды относительно лопасти в любой точке лопасти равна сумме векторов тангенциальной скорости лопасти при вращательном движении и скорости перемещения летательного аппарата, очевидно, что наиболее критической точкой является периферия лопасти, в частности в положении, где две вышеупомянутые скорости имеют параллельные и направленные в одну сторону векторы.
Фактически, тогда как скорость перемещения равномерна для всего ротора, тангенциальная скорость является максимальной на периферии лопасти, находящейся на максимальном расстоянии от оси вращения ротора. Предельной скоростью прямолинейного движения летательного аппарата является скорость, при которой поток на периферии лопасти оказывается в условиях границы околозвукового режима, в частности при скорости 0,9 Маха (приблизительно).
Кроме того, трансмиссия механического типа, расположенная между одной или более газовой турбиной и ротором, неизбежно приводит к недостатку, заключающемуся в динамическом соединении с роторами, что подразумевает, что все гармонические движения роторов приводят к аналогичным колебаниям в работе трансмиссии и самой газовой турбины (или газовых турбин, если имеется более чем одна турбина), с очевидной неравномерностью работы, что может привести к повышенному износу компонентов, если этому явлению не противодействовать.
Задачей настоящего изобретения является устранение вышеописанных технических проблем. В частности, задачей настоящего изобретения является создание двигательной и передающей движение сборки для винтокрылого летательного аппарата, которая способна сохранять свою функциональность даже после отказа, имеет пониженный вес и сложность и при той же установленной мощности позволяет достигать больших скоростей перемещения по сравнению с известными системами. Задачей настоящего изобретения, кроме того, является создание двигательной и передающей движение сборки для винтокрылого летательного аппарата, которая позволяет легко менять частоту вращения одного или более ротора этого летательного аппарата.
Краткое описание сущности изобретения
Задача настоящего изобретения достигается с помощью двигательной и передающей движение сборки, имеющей признаки, перечисленные в приложенной формуле изобретения, которая является неотъемлемой частью настоящего описания, приведенного относительно настоящего изобретения.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылкой на сопроводительные чертежи, на которых:
Фиг. 1 - вид в перспективе двигательной и передающей движение сборки согласно настоящему изобретению;
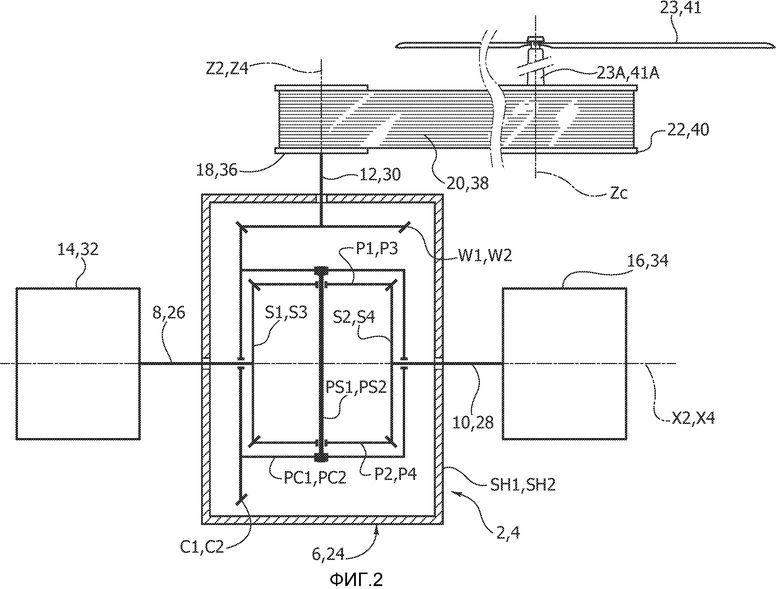
Фиг. 2 - схематический вид с частичным сечением, в равной степени относящийся к первому функциональному комплексу сборки по фиг. 1 (линия IIA-IIA) и ко второму функциональному комплексу сборки по фиг. 1 (линия IIB-IIB); и
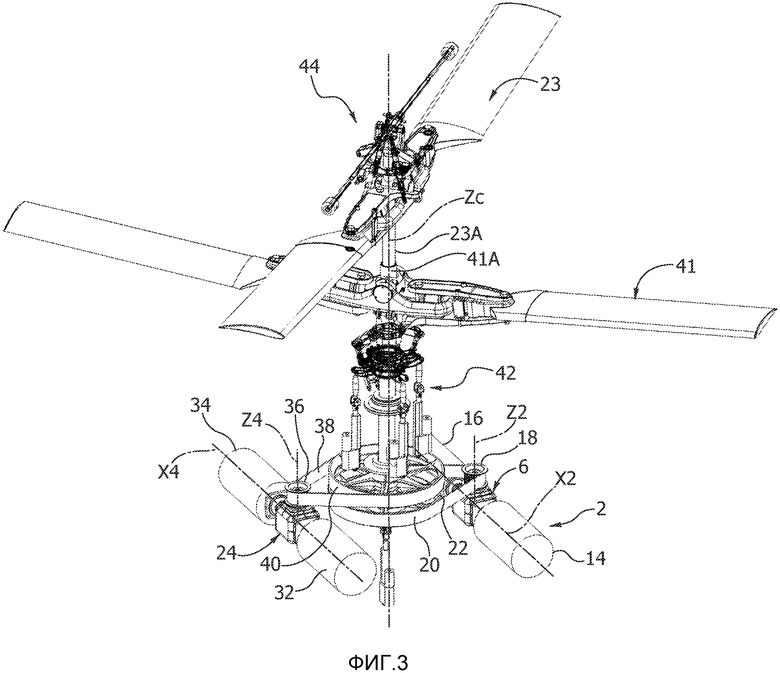
Фиг. 3 - вид в перспективе роторной сборки винтокрылого летательного аппарата, в которой используется двигательная и передающая движение сборка по фиг. 1.
Описание предпочтительных вариантов воплощения
Позицией 1 на фиг. 1 обозначена двигательная и передающее движение сборка по настоящему изобретению. Сборка 1 содержит первую сборку 2 мотор-редуктора и вторую сборку 4 мотор-редуктора, которые идентичны друг другу.
Сборка 2 мотор-редуктора содержит первый механический дифференциал 6, предпочтительно открытого типа (так называемый "открытый дифференциал"), который имеет первый входной вал 8 и второй входной вал 10, которые соосны друг другу и первой оси вращения Х2, вокруг которой они могут поворачиваться, и выходной вал 12, который способен вращаться вокруг оси, совпадающей со второй осью Z2 вращения, ортогональной к оси X2 и ортогональной к входным валам 8, 10.
С первым и вторым входными валами 8, 10 соединены соответственно первый электродвигатель 14 и второй электродвигатель 16, которые идентичны друг другу и соосны друг с другом и с осью Х2.
В последующем описании будут приведены ссылки на фиг. 2, где ссылочные позиции представляют собой пары чисел, разделенных запятой. В каждой паре позиция слева от запятой относится к сборке 2 мотор-редуктора, а позиция справа от запятой относится к сборке 4 мотор-редуктора и компоненты, обозначенные позициями одной пары являются идентичными друг другу.
Дифференциал 6 дополнительно содержит:
- первый корпус SH1, пересекаемый входными валами 8, 10;
- первую солнечную шестерню S1 и вторую солнечную шестерню S2, соединенные с возможностью вращения соответственно с входными валами 8, 10 и находящиеся в зацеплении с первой планетарной шестерней Р1 и второй планетарной шестерней Р2;
- первый вал PS1, который поддерживает с возможностью вращения планетарные шестерни Р1, Р2 (установленные на нем с возможностью вращения);
- первое водило PC1, внутри которого расположены вал PS1 и шестерни Р1, Р2, S1, S2;
- первый зубчатый венец С1 с коническими зубьями, прикрепленный к водилу РС1.
Все шестерни Р1, Р2, S1, S2 в этом варианте имеют конические зубья. Разумеется, в других вариантах воплощения можно предусмотреть использование дифференциалов с цилиндрическими шестернями.
Вал PS1 можно эквивалентно заменить двумя отдельными валами, по одному для каждой планетарной шестерни Р1, Р2.
Зубчатый венец С1 имеет конические зубья и находится в зацеплении с первой шестерней W1 с к коническими зубьями, которая расположена внутри корпуса SH1 и соединена с возможностью вращения с выходным валом 12, который пересекает корпус SH1.
С выходным валом 12 с возможностью вращения соединен первый ведущий шкив 18, который способен вращаться вокруг оси Z2 и, в свою очередь, соединен с возможностью вращения первым приводным ремнем 20 с первым ведомым шкивом 22, способным вращаться вокруг оси Zc, параллельной оси Z2. Со ссылкой на фиг. 2, 3, ведомый шкив 22 выполнен для соединения с возможностью вращения с первым ротором 23 винтокрылого летательного аппарата посредством первого трансмиссионного вала 23А, проходящего по оси Zc.
Ведомый шкив 22 предпочтительно имеет диаметр, существенно больше, чем диаметр ведущего шкива 18. С другой стороны, следует понимать, что шкивы 18, 22 и ремень 60 являются механической трансмиссией, которую можно заменить на эквивалентную, например на зубчатую передачу или цепную передачу.
Вторая сборка 4 мотор-редуктора совершенно идентичена сборке 2 мотор-редуктора и содержит второй дифференциал 24 механического типа и предпочтительно открытый, идентичный дифференциалу 6 и включающий в себя третий входной вал 26 и четвертый входной вал 28, соосные друг с другом и с третьей осью Х4 вращения (вокруг которой они могут поворачиваться), предпочтительно параллельной оси Х2 вращения, и второй выходной вал 30, который может поворачиваться вокруг оси, совпадающей с четвертой осью Z4 вращения, ортогональной оси Х4 и параллельной оси Z2. Снова ссылаясь на фиг. 2, как и дифференциал 6, дифференциал 24 содержит:
- второй корпус SH2, пересекаемый входными валами 26, 28;
- третью солнечную шестерню S3 и четвертую солнечную шестерню S4, соединенные с возможностью вращения соответственно с входными валами 26, 28 и находящиеся в зацеплении с третьей планетарной шестерней Р3 и четвертой планетарной шестерней Р4;
- второй вал PS2, который поддерживает с возможностью вращения планетарные шестерни Р3, Р4 (установленные на нем с возможностью вращения);
- второе водило РС2, внутри которого расположены вал PS2 и шестерни Р3, Р4, S3, S4; и
- второй зубчатый венец С2 с коническими зубьями, прикрепленный к водилу РС2.
Зубчатый венец С2 находится в зацеплении с шестерней W2, которая также имеет конические зубья, установлен внутри корпуса SH2 и соединен с возможностью вращения с выходным валом 30, который пересекает корпус SH2.
С входными валами 26, 28 соединены соответственно третий электродвигатель 32 и четвертый электродвигатель 34, которые идентичны друг другу и двигателям 4, 16. Электродвигатели 32, 34 установлены соосно друг с другом и с осью Х4.
На выходном валу 30 соединен с возможностью вращения второй ведущий шкив 36, который выполнен с возможностью поворачиваться вокруг оси Z4, и соединен с возможностью вращения вторым ремнем 68 со вторым ведомым шкивом 40, который в этом варианте воплощения идентичен ведомому шкиву 22 и установлен соосно с ним. Второй ведомый шкив 40 выполнен для соединения с возможностью вращения со вторым ротором 41 винтокрылого летательного аппарата посредством второго трансмиссионного вала 41А, который выполнен пустотелым и внутри которого установлен первый трансмиссионный вал 23А.
Первый ротор 23 оперативно соединен с устройством для изменения циклического шага, в целом обозначенным позицией 42, которое относится к известному типу и, следовательно, не требует подробного описания. Второй ротор 41 оперативно соединен со штангой 44 стабилизатора, которая также относится к известному типу и конструкция которой известна специалистам в данной отрасли.
Комплекс сборок 2, 4 мотор-редуктора, соединенный с соответствующими роторами 23, 41, таким образом, определяет роторную сборку винтокрылого летательного аппарата (фиг. 3).
Далее следует описание работы сборок 2, 4 мотор-редуктора и сборки 1.
Рассматривая работу сборки 2 мотор-редуктора (работа сборки 4 мотор-редуктора совершенно идентична и нижеследующее описание также относится к соответствующим компонентам сборки 4 мотор-редуктора), каждый из двигателей 14, 16 передает механическую мощность на дифференциал 6 через входные валы 8, 10. От них механическая мощность передается на солнечные шестерни S1, S2, а затем - на планетарные шестерни Р1, Р2 и водило РС1, от которого она передается на выходной вал 12 и шкив 18, через зубчатый венец С1 и шестерню W1.
Посредством ремня 20 вращательное движение передается на ведомый шкив 22 и, от него - на ротор 23. Ротор 23, таким образом, при нормальной работе приводится во вращение двумя электродвигателями 14, 16.
Сборка 2 мотор-редуктора является по существу избыточной, поскольку в случае отказа одного из двигателей 14, 16 передача мощности на шкив 22 в любом случае остается возможной. Фактически, предполагая, что двигатель 14 сломан, и передача мощности на дифференциал 6 и ротор 23 прекращается из-за этого отказа, двигатель 16 может продолжать подавать мощность через соединенный с ним входной вал 10 и, кроме того, благодаря дифференциалу 6, не должен приводить во вращение отказавший двигатель 14.
Фактически, солнечная шестерня S1, соединенная с двигателем 14, остается неподвижной, тогда как планетарные шестерни Р1 и Р2 приводятся во вращение вокруг их осей и также вокруг оси вращения солнечной шестерни S1, которая совпадает с осью Х2 двигателя 16 через солнечную шестерню S2, в любом случае приводя во вращение водило РС1, выходной вал 12 и ротор 23.
Следует отметить, что для получения вышеописанного эффекта дифференциал 6 должен быть открытого типа, поскольку самоблокирующийся дифференциал, хотя бы и с минимальным отношением блокирования, заставит все еще функционирующий двигатель привести во вращение отказавший двигатель.
Разумеется, это точно так же относится и к случаю отказа двигателя 16, и к сборке 4 мотор-редуктора, учитывая, что сборки 2, 4 мотор-редуктора конструктивно и функционально идентичны.
Кроме того, размер каждого электродвигателя 14, 16 и 32, 34 выбирают так, чтобы он работал на 50% своей максимальной мощности, когда соответствующие сборки 2, 4 мотор-редуктора не находятся в состоянии отказа. В случае отказа, например, электродвигателя 14 и/или электродвигателя 32 достаточно перевести все еще функционирующие электродвигатель 16 и/или, соответственно, 34, на максимальную мощность, которую можно обеспечить, чтобы свести влияние нарушения в работе сборки 1 по существу к нулю.
В основном, каждый электродвигатель в каждой сборке 2, 4 мотор-редуктора выбирают так, чтобы он развивал максимальную мощность, по существу равную удвоенной мощности, необходимой для приведения во вращение нагрузки, соединенной с соответствующей сборкой мотор-редуктора, в частности первого и второго ротора 23, 41.
С помощью сборок 2, 4 мотор-редуктора роторы 23, 41 приводятся во вращение в направлениях, противоположных друг другу, для того, чтобы погасить реактивный момент на раме винтокрылого летательного аппарата, на котором установлена сборка 1.
Используя вышеописанные отличительные признаки избыточности и поведения при отказе в одной из сборок 2, 4 мотор-редуктора, очевидно, что летательный аппарат, на котором установлена сборка 1, способен безопасно лететь даже при отказе одного электродвигателя в каждой из сборок 2, 4 мотор-редуктора. Следовательно, такой летательный аппарат может безопасно лететь с максимум двумя отказавшими электродвигателями, обеспеченными так, что они относятся к разным сборкам мотор-редуктора. Другими словами, сборка 1 может функционировать даже при участии лишь двух из четырех установленных электродвигателей, обеспеченных так, что два отказавших двигателя (или, эквивалентно, два функционирующих электродвигателя) не соединены с одним и тем же дифференциалом и, следовательно, с одним и тем же ротором.
Кроме того, в отличие от известных двигательных и передающих движение сборок, в которых приведение в действие выполняется совершающим возвратно-поступательные перемещения тепловым двигателем или газовой турбиной, где изменение частоты вращения является проблемной операцией, не лишенной риска, в этом случае можно изменять частоту вращения каждого ротора 23, 41 совершенно независимо и просто изменяя напряжение, подающееся на электродвигатели 14, 16, 32, 34.
Такая возможность изменения частоты вращения позволяет отказаться от механического управления для изменения общим шагом роторов Р23, 41, поскольку эффект изменения общего шага достигается просто изменением частоты вращения каждого ротора.
Кроме того, техническая применимость, осуществимая посредством регулирования напряжения на электродвигателях 14, 16, 32, 34, позволяет в полете уменьшать скорость вращения роторов 23, 41, что в свою очередь позволяет увеличить скорость перемещения летательного аппарата.
Фактически скорость текучей среды относительно лопастей каждого ротора по существу зависит от периферийной скорости точек на лопасти, к которой следует прибавить скорость поступательного движения летательного аппарата в воздухе. Как описано выше, когда абсолютная скорость лопасти относительно текучей среды, в которую она погружена, достигает критических условий, т.е. условий, соответствующих условиям звукового потока, возникает внезапное уменьшение подъемной силы и появляется околозвуковой флаттер, который является условием, очень опасным для стабильности и безопасности полета летательного аппарата. Однако при уменьшении скорости вращения роторов 23, 41 компонент периферийной скорости лопастей уменьшается и, следовательно, удаляется от режима звукового потока, описанного выше.
Использование сборки 1 для привода роторов 23, 41, кроме того, дает еще одно преимущество с точки зрения управляемости летательного аппарата и стабильности параметров полета. В частности, в отличие от систем, в которых используется топливо (например, тепловые двигатели, совершающие возвратно-поступательные движения и газовые турбины, упомянутые выше), сборка 1 запитывается от комплекта аккумуляторов, которые, очевидно, не меняют свой вес во время скора службы. Таким образом, достигается преимущество, заключающееся в наличии системы с по существу постоянным весом, что позволяет лететь с одинаковыми параметрами на протяжении всего маршрута.
Использование механических дифференциалов для передачи движения от двигателей 14, 16, 32, 34 к роторам, соответственно, 23 и 41, кроме того, позволяет развязать гармонические движения, присущие лопастям ротора по отношению к движению электродвигателей, поскольку возможные колебания, передаваемые по трансмиссионным валам 23А, 41А, по существу "фильтруются" дифференциалами 6, 24 за счет небольшого вращения планетарных шестерен Р1, Р2, Р3, Р4 относительно соответствующих солнечных шестерен S1, S2, S3, S4, соединенных с электродвигателями 14, 16, 32, 34.
Сборка 1 по настоящему изобретению чрезвычайно компактна при таких же характеристиках в сравнении с аналогичными системами, основанными на тепловых двигателях с механическими или гидростатическими трансмиссиями. По сравнению с последними, где обычно давление рабочей жидкости составляет порядка сотен бар, сборка 1 по существу является более безопасной, поскольку в ней отсутствует риск разрыва одной или более трубок, по которым течет жидкость под высоким давлением.
Сборка 1, кроме того, может применяться ко множеству летательных аппаратов, причем этот термин используется для обозначения любого транспортного средства, предназначенного для движения в воздухе, включая транспортные средства, предназначенные для движения преимущественно по дорогам, на которых установлен летающий модуль.
В таком варианте воплощения, где пространство для монтажа двигательной и передающей движение сборки существенно меньше обычно имеющегося в транспортном средстве, предназначенном для движения только по воздуху, существенная компактность сборки 1 облегчает ее установку.
Следует, кроме того, понимать, что, хотя в изображенном варианте воплощения двигательной и передающей движение сборки 1 она выполнена для приведения во вращение соосных и раздельных роторов, каждая из сборок 2, 4 мотор-редуктора сборки 1 может быть выполнена для приведения во вращение одного и того же (и единственного) ротора, например, на винтокрылом летательном аппарате с единственным главным ротором и хвостовым ротором или может быть выполнена для использования на летательных аппаратах с двумя роторами, расположенными не соосно.
Кроме того, следует понимать, что каждая сборка 2, 4 мотор-редуктора может быть использована индивидуально, как независимое устройство в транспортных средствах с единственным главным ротором, поскольку он является по существу избыточным, как было описано выше.
Следует отменить, что фактически между сборками 2, 4 мотор-редуктора отсутствует форма взаимодействия, что по существу не ограничивает их применение в качестве двигательной и передающей движение сборки, в которой предусмотрена их комбинация.
Разумеется, не отступая от принципов настоящего изобретения, детали конструкции и варианты воплощения можно изменять в широких пределах относительно варианта, описанного и изображенного здесь путем неограничивающего примера, определенного приложенной формулой.
Изобретение относится к области авиации, в частности к конструкциям приводов винтов винтокрылых летательных аппаратов. Двигательная и передающая движение сборка (1) для винтокрылого летательного аппарата содержит первую сборку (2) мотор-редуктора и вторую сборку (4) мотор-редуктора, в которой первая и вторая сборки (2, 4) мотор-редуктора предназначены для приведения во вращение по меньшей мере одного ротора винтокрылого летательного аппарата. Каждая из первой и второй сборок (2, 4) мотор-редуктора содержит механический дифференциал (6, 24), содержащий первый входной вал (8, 26), второй входной вал (10, 28) и выходной вал (12, 30) и первый электродвигатель (14, 32) и второй электродвигатель (16, 34), соединенные соответственно с первым и вторым входными валами (8, 10, 26, 28). Выходной вал (12, 30) каждой сборки (2, 4) мотор-редуктора расположен для соединения с возможностью вращения с ротором (23, 41) винтокрылого летательного аппарата. Достигается снижение веса и упрощение конструкции, сохранение функциональности после отказа. 2 н. и 8 з.п. ф-лы, 3 ил.
1. Двигательная и передающая движение сборка (1), в частности, для винтокрылого летательного аппарата, отличающаяся тем, что содержит:
- первую сборку (2) мотор-редуктора; и
- вторую сборку (4) мотор-редуктора,
причем первая и вторая сборки (2, 4) мотор-редуктора выполнены для приведения во вращение по меньшей мере одного ротора винтокрылого летательного аппарата; и
причем каждая из первой и второй сборок (2, 4) мотор-редуктора содержит:
- механический дифференциал (6, 24), включающий в себя первый входной вал (8, 26), второй входной вал (10, 28) и выходной вал (12, 30); и
- первый электродвигатель (14, 32) и второй электродвигатель (16, 34), соединенные соответственно с первым и вторым входными валами (8, 10, 26, 28),
при этом выходной вал (12, 30) каждой сборки (2, 4) мотор-редуктора выполнен для соединения с возможностью вращения с ротором (23, 41) винтокрылого летательного аппарата.
2. Сборка (1) по п. 1, отличающаяся тем, что механический дифференциал (6, 24) каждой из первой и второй сборок (2, 4) мотор-редуктора является дифференциалом открытого типа.
3. Сборка (1) по п. 1 или 2, отличающаяся тем, что механический дифференциал (6, 24) каждой из первой и второй сборок (2, 4) мотор-редуктора содержит:
- первую солнечную шестерню (S1, S3), соединенную с первым входным валом (8, 26), и вторую солнечную шестерню (S2, S4), соединенную со вторым входным валом (10, 28);
- первую планетарную шестерню (Р1, Р2) и вторую планетарную шестерню (P3, P4), которые находятся в зацеплении с первой и второй солнечными шестернями (S1, S2, S3, S4) и установлены с возможностью вращения на водиле (РС1, РС2); и
- зубчатый венец (С1, С2), прикрепленный к водилу (РС1, РС2) и находящийся в зацеплении с шестерней (W1, W2), соединенной с возможностью вращения с выходным валом (12, 30).
4. Сборка (1) по п. 3, отличающаяся тем, что первый и второй входные валы (8, 10, 26, 28) каждого механического дифференциала (6, 24) расположены соосно друг с другом и с первой осью вращения (Х2, Х4), вокруг которой они могут вращаться, и тем, что выходной вал (12, 30) каждого механического дифференциала (6, 24) является соосным со второй осью (Z2, Z4) вращения, вокруг которой выходной вал (12, 30) способен вращаться и которая проходит ортогонально по отношению к первой оси (Х2, Х4) вращения.
5. Сборка (1) по п. 3, отличающаяся тем, что зубчатый венец (С1, С2) и шестерня (W1, W2) имеют конические зубья.
6. Сборка (1) по п. 4, отличающаяся тем, что первый и второй электродвигатели (14, 16, 32, 34) каждой сборки (2, 4) мотор-редуктора соосны друг с другом и с первой осью (Х2, Х4) вращения.
7. Сборка (1) по п. 1, отличающаяся тем, что с выходным валом (12, 30) каждого механического дифференциала (6, 24) соединен с возможностью вращения ведущий шкив (18, 36), при этом ведущий шкив (18, 36) в свою очередь соединен с возможностью вращения приводным ремнем (20, 38) с ведомым шкивом (22, 40), выполненным для соединения с возможностью вращения с ротором (23, 41) винтокрылого летательного аппарата.
8. Сборка (1) по п. 1 или 7, отличающаяся тем, что первая сборка (2) мотор-редуктора выполнена для приведения в действие первого ротора (23) винтокрылого летательного аппарата и тем, что вторая сборка (4) мотор-редуктора выполнена для приведения в действие второго ротора (41) винтокрылого летательного аппарата.
9. Сборка (1) по п. 1, отличающаяся тем, что каждый электродвигатель (14, 16, 32, 34) каждой из первой и второй сборок (2, 4) мотор-редуктора имеет максимальную мощность, вдвое превышающую мощность, необходимую для приведения во вращение нагрузки, в частности ротора (23, 41) винтокрылого летательного аппарата, соединенной с соответствующей сборкой (2, 4) мотор-редуктора.
10. Винтокрылый летательный аппарат, отличающийся тем, что содержит двигательную и передающую движение сборку (1) по любому из пп. 1-9.
| DE 202006005862 U1, 08.06.2006;WO 2004094868 A1, 04.11.2004;EA 200802355 A1, 30.12.2009;US 4709882 A, 01.12.1987 |

