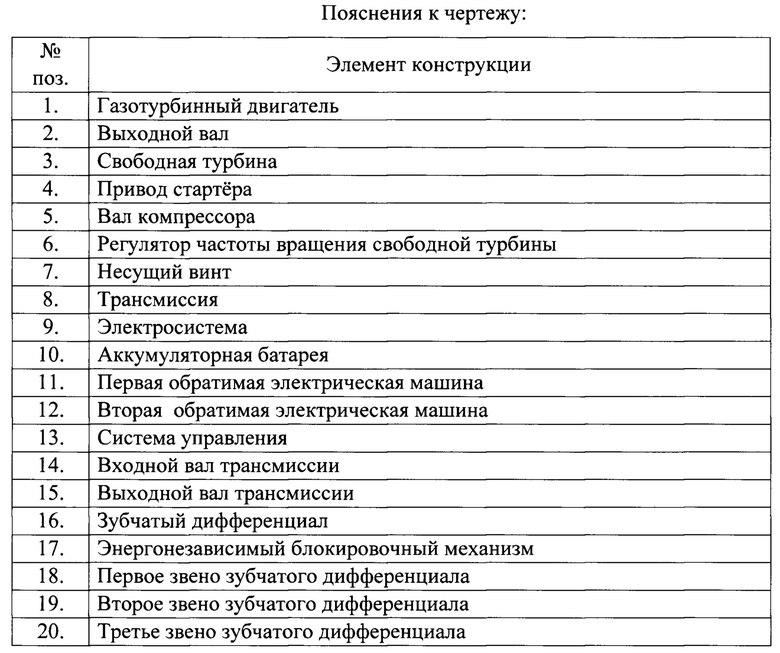
Область техники, к которой относится изобретение
Группа изобретений относится к области авиастроения, а именно к конструкции винтокрылого летательного аппарата. Изобретение может быть использовано при разработке систем привода несущих винтов для перспективных винтокрылых летательных аппаратов или модернизации находящихся в эксплуатации винтокрылых летательных аппаратов для улучшения их летно-технических характеристик.
Уровень техники
Современные винтокрылые летательные аппараты, в частности вертолеты, как правило, оснащены газотурбинным двигателем со свободной турбиной и трансмиссией (системой привода несущего винта) с постоянным передаточным числом - отношением частоты вращения свободной турбины двигателя к частоте вращения несущего винта. Частота вращения несущего винта, при различных условиях полета, таких как скорость, высота, жестко связана с частотой вращения свободной турбины двигателя, которая поддерживается постоянной автоматическим регулятором, управляющим впрыском топлива в камеру сгорания двигателя.
Известны перспективные винтокрылые летательные аппараты (RU 168554 U1, В64С27/22, публ. 08.02.2017; RU 2407675 C1, В64С27/22, публ. 27.12.2010), которые с целью повышения скорости полета кроме несущего винта оснащаются крыльями и дополнительными устройствами для создания пропульсивной тяги. Такие летательные аппараты требуют значительного, до 20 и более процентов, снижения частоты вращения несущего винта для снижения потребления мощности в скоростном полете, предотвращения срыва потока на отступающей лопасти или сверхзвукового обтекания на наступающей лопасти.
Известна силовая установка скоростного комбинированного вертолета (RU 179890 U1, В64С27/12, B64D35/04, F02C3/13, публ. 28.05.2018), в которой частота вращения двигателя должна сохраняться на прежнем уровне или повышаться для обеспечения эффективной работы пропульсивных движителей.
Создание нового поколения винтокрылых летательных аппаратов, обладающих улучшенными летно-техническими характеристиками, такими как: скорость, продолжительность, дальность, максимальная высота полета может быть решена созданием эффективной и отказобезопасной трансмиссии винтокрылого аппарата с возможностью автоматического бесступенчатого изменения передаточного числа в широком диапазоне значений, что является одной из актуальных задач мирового авиастроения ("Possibilities and difficulties for rotorcraft using variable transmission drive trains" H. Amri, R. Feil, M. Hajek, M. Weigand (CEAS Aeronaut J (2016)).
Известна регулируемая трансмиссия винтокрылого летательного аппарата (RU 2525353 C1, В64С27/12, B64D35/00, F16H 37/08, публ. 10.08.2014), которая содержит редуктор, две обгонные муфты на валах от двигателей, вал несущего винта, вал пропульсивного движителя и дифференциал, который связан зубчатыми колесами с валами двигателей. Одно выходное звено дифференциала соединено с валом пропульсивного движителя. Другое выходное звено дифференциала соединено с валом несущего винта через высокоскоростную обгонную муфту. Водило дифференциала связано с валом несущего винта через низкоскоростную обгонную муфту. Каждое звено дифференциала имеет устройство торможения. Недостатком данного аналога является то, что трансмиссия является двухрежимной - имеет только два фиксированных значения передаточного числа. Кроме того, в процессе переключения режимов возможно неконтролируемое снижение передачи мощности к несущему винту - в случае одновременного растормаживания двух звеньев дифференциала, или чрезмерное выделение тепла тормозными устройствами при их одновременном торможении.
Известна трансмиссия для воздушного судна и вертолет, которая является наиболее близким аналогом, принятым за прототип данного изобретения (RU 2672536 C1, В64С27/12, B60K6/08, F16H3/72, публ. 15.11.2018), в которой вертолет содержит газотурбинный двигатель и трансмиссию для передачи мощности к несущему винту. Трансмиссия включает в себя узел для независимого регулирования частоты вращения двигателя и несущего винта. Согласно изобретению: «узел содержит первый входной вал, выполненный с возможностью приема крутящего момента от двигателя, выходной вал, выполненный с возможностью передачи крутящего момента приемнику крутящего момента, передаточный элемент, имеющий, по меньшей мере, две степени свободы и содержащий первую, вторую и третью подвижные части, обратимую электрическую управляющую машину (регулятор) и обратимую электрическую балансировочную машину, причем входной вал соединен с первой подвижной частью, выходной вал соединен со второй подвижной частью, первая электрическая управляющая машина соединена с третьей подвижной частью, а первая электрическая балансировочная машина соединена последовательно с входным или выходным валом». Иными словами, аналог предполагает применение в конструкции вертолета многопоточной бесступенчатой электромеханической трансмиссии. Данная трансмиссия состоит минимум из двух ветвей: механической - все механические звенья передачи мощности от выходного вала двигателя до несущего винта, и электрической - двух обратимых электрических машин, соединенных электрически между собой. Механическая ветвь содержит в своей кинематической цепи зубчатый дифференциал (передаточный элемент, имеющий, по меньшей мере, две степени свободы) состоящий из трех звеньев. Первое звено зубчатого дифференциала кинематически соединено с выходным валом двигателя, второе звено - с кинематической цепью несущего винта, а третье звено - с первой обратимой электрической машиной («первый электрический регулятор»). Вторая обратимая электрическая машина («первая балансировочная машина») кинематически соединяется с валом двигателя или валом несущего винта. Первая электрическая машина вращает третье звено зубчатого дифференциала, в результате чего (вследствие свойств дифференциала) изменяется передаточное число трансмиссии как отношение частоты вращения вала двигателя к частоте вращения несущего винта. Увеличение или уменьшение передаточного числа зависит от направления вращения первой электрической машины, кинематически связанной с третьим звеном дифференциала (по этой причине она названа регулятором).
В зависимости от сочетания направления вращения вала первой электрической машины и направления действия реактивного крутящего момента со стороны третьего звена зубчатого дифференциала, электрическая машина должна создавать достаточный для надежного контроля частоты вращения вращающий или тормозящий момент, то есть - работать в двигательном или генераторном режиме. Для устойчивого и управляемого функционирования данной трансмиссии необходима сбалансированность электросистемы по производству и потреблению электроэнергии.
В прототипе решают техническую проблему сбалансированности электросистемы при помощи второй обратимой «балансировочной» электромашины, кинематически соединенной с входным или выходным валом трансмиссии и выполняющей при необходимости роль источника (генератора) или потребителя электроэнергии (двигателя). Вторая обратимая электрическая машина генерирует «недостающую» электрическую мощность, потребляя механическую мощность от вала двигателя или несущего винта (в генераторном режиме), или потребляет «избыточную» электрическую мощность, превращая ее в механическую, которую передает валу двигателя или несущего винта.
Недостатком прототипа является необходимость иметь в составе вертолета минимум две обратимые электрические машины («управляющую» и «балансировочную»), причем мощность этих машин прямо пропорциональна величине диапазона регулирования передаточного числа, что в результате увеличивает массу трансмиссии вертолета.
Другим недостатком прототипа является то, что для парирования отказа любой из электромашин, или другого отказа электросистемы или автоматики управления, при котором первая (управляющая) электрическая машина не создает как тормозящий, так и вращающий крутящий момент - применяется муфта свободного хода, которая «соединена последовательно между первым электрическим регулятором и первым элементом трансмиссии» (п. 3 формулы прототипа). В такой конструкции диапазон регулирования передаточного числа трансмиссии прямо пропорционален разнице между частотой вращения управляющей электрической машины и частотой вращения обоймы муфты свободного хода, соединенной с кинематической цепью входного вала трансмиссии, которая задает номинальное значение передаточного числа. При отказе управляющая электрическая машина перестанет создавать вращающий или тормозящий крутящий момент, что приведет к неконтролируемому резкому замедлению или ускорению вращения третьего звена зубчатого дифференциала и соединенному с ним ротору отказавшей электрической машины под действием реактивного крутящего момента со стороны дифференциала. При выравнивании частоты этого неконтролируемого вращения с частотой вращения обоймы муфты свободного хода, соединенной с кинематической цепью входного вала трансмиссии, произойдет включение муфты свободного хода, и третье звено дифференциала будет вращаться с номинальной частотой. Очевидно, что такой процесс резкого изменения передаточного числа неизбежно приведет к возрастанию в элементах трансмиссии динамической составляющей крутящего момента, так как трансмиссия винтокрылого летательного аппарата соединяет между собой элементы конструкции, обладающие высокой кинетической энергией: несущий винт, свободная турбина, роторы электромашин и вентиляторов. Величина этой динамической составляющей прямо пропорциональна диапазону регулирования передаточного числа и крутящему моменту на несущем винте, который определяет режим полета. Таким образом, техническое решение по п. 3 формулы прототипа ограничивает возможности конструкции летательного аппарата в части диапазона регулирования передаточного числа и мощности трансмиссии с точки зрения прочности.
Указанные недостатки прототипа снижают дальность, высоту продолжительность, скорость полета, увеличивают расход топлива, снижают уровень отказобезопасности.
Раскрытие сущности изобретения
Техническая проблема, решаемая заявляемым изобретением, заключается:
- в создании винтокрылых летательных аппаратов, обладающих улучшенными летно-техническими характеристиками, такими как: скорость, продолжительность, дальность, максимальная высота полета, за счет применения электромеханической бесступенчатой трансмиссии;
- в разработке способа балансировки электросистемы по генерации и потреблению электроэнергии, при использовании минимального количества электромашин, и, как следствие, минимизации массы пустого винтокрылого летательного аппарата.
Технический результат применения группы изобретений заключается в:
- улучшении летно-технических характеристик винтокрылого летательного аппарата: увеличении скорости, продолжительности, дальности, максимальной высоты полета винтокрылого летательного аппарата;
- снижении расхода топлива при эксплуатации винтокрылого летательного аппарата;
- снижении частоты вращения несущего винта на величину не менее 20% от номинальной для высокоскоростных винтокрылых летательных аппаратов для того, обеспечить оптимальную скорость воздушного потока на концах лопастей несущего винта;
- повышении отказобезопасности трансмиссии.
Технический результат, достигаемый при осуществлении заявляемого способа балансировки мощности электросистемы заключается в обеспечении сбалансированности электросистемы по генерации и потреблению электроэнергии в процессе изменения передаточного числа электромеханической трансмиссии в широком диапазоне (не менее 20%).
Для достижения технического результата предлагается винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией, содержащий
минимум один газотурбинный двигатель (1), включающий в себя выходной вал (2), кинематически соединенный со свободной турбиной (3), привод стартера (4), кинематически соединенный с валом компрессора (5),
минимум один несущий винт (7),
трансмиссию (8), включающую в себя входной вал (14), кинематически соединенный с выходным валом (2) газотурбинного двигателя (1), выходной вал трансмиссии (15), кинематически соединенный с несущим винтом (7), зубчатый дифференциал (16), содержащий первое (18), второе (19) и третье (20) звенья зубчатого дифференциала, при этом первое звено зубчатого дифференциала (18) кинематически соединено с входным валом трансмиссии (14), второе звено зубчатого дифференциала (19) кинематически соединено с выходным валом трансмиссии (15),
электросистему (9), включающую в себя аккумуляторную батарею (10), первую обратимую электрическую машину (11), которая кинематически связана с третьим звеном зубчатого дифференциала (20), и вторую обратимую электрическую машину (12), бортовые электропотребители,
кроме того, винтокрылый летательный аппарат оснащен системой управления (13), посредством которой осуществляется управление первой (11), второй (12) обратимыми электрическими машинами и регулятором частоты вращения свободной турбины (6) в автоматическом режиме,
первая (11) и вторая (12) обратимые электрические машины электрически связаны между собой и аккумуляторной батареей (10) через электросистему (9),
вторая обратимая электрическая машина (12) кинематически соединена с приводом стартера (4) газотурбинного двигателя (1),
энергонезависимый блокировочный механизм (17) кинематически соединен с третьим звеном зубчатого дифференциала (20).
Также в винтокрылом летательном аппарате с электромеханической бесступенчатой вариативной трансмиссией дополнительно установлены механическая или гидравлическая, или электрическая, или гибридная хвостовая трансмиссия и устройство компенсации реактивного момента несущего винта (7).
При этом в винтокрылом летательном аппарате с электромеханической бесступенчатой вариативной трансмиссией дополнительно установлены пропульсивные движители и механическая, или гидравлическая, или электрическая трансмиссия для их привода.
Кроме того, в винтокрылом летательном аппарате с электромеханической бесступенчатой вариативной трансмиссией установлена минимум одна дополнительная обратимая электрическая машина, которая кинематически соединена с выходным валом трансмиссии (15) или входным валом трансмиссии (14), а электрически связана с электросистемой (9).
При этом в винтокрылом летательном аппарате с электромеханической бесступенчатой вариативной трансмиссией дополнительно установлены газотурбинный двигатель, кинематически не связанный с трансмиссией (8) несущего винта (7), и дополнительная управляемая обратимая электрическая машина, кинематически связанная с выходным валом или приводом стартера дополнительного газотурбинного двигателя, а электрически связанная с электросистемой (9).
Для достижения технического результата предлагается способ балансировки мощности электросистемы летательного аппарата, характеризующийся тем, что в течение полета:
в систему управления (13) передают целевые и текущие значения частот вращения несущего винта (7) и свободной турбины (3) газотурбинного двигателя (1), номинальные значения частоты вращения свободной турбины (3) газотурбинного двигателя (1), электрического напряжения и/или частоты переменного тока электросистемы (9),
выполняют операцию изменения передаточного числа в электромеханической бесступенчатой вариативной трансмиссии (8),
при этом контролируют энергетический баланс электросистемы (9) путем измерения текущего значения электрического напряжения и/или частоты переменного тока и сравнения этих значений с номинальными значениями,
при этом в случае выхода за пределы диапазона допустимых значений показателей электрического напряжения и/или частоты переменного тока, реализуют алгоритм, согласно которому
в случае повышения электрического напряжения и/или частоты переменного тока в электросистеме (9) относительно номинальных значений, обеспечивают балансировку мощности, для чего переводят вторую обратимую электрическую машину (12) в моторный режим и, сообщая энергию валу компрессора (5) газотурбинного двигателя (1), увеличивают потребляемую мощность второй обратимой электрической машины (12) до тех пор, пока электрическое напряжение и/или частота переменного тока в электросистеме (9) не уменьшатся до величин, находящихся внутри диапазона допустимых значений,
в случае понижения электрического напряжения или частоты переменного тока в электросистеме (9) относительно номинальных значений, обеспечивают балансировку мощности, для чего переводят вторую обратимую электрическую машину (12) в генераторный режим и, отбирая энергию от вала компрессора (5) газотурбинного двигателя (1), увеличивают генерируемую второй обратимой электрической машиной (12) мощность до тех пор, пока электрическое напряжение и/или частота переменного тока в электросистеме (9) не увеличатся до величин, находящихся внутри диапазона допустимых значений.
При этом для выполнения операции изменения передаточного числа система управления (13) по запрограммированному алгоритму вычисляет текущее передаточное число трансмиссии (8) как отношение текущей частоты вращения свободной турбины (3) к текущей частоте вращения несущего винта (7), целевое передаточное число трансмиссии (8) как отношение целевой частоты вращения свободной турбины (3) к целевой частоте вращения несущего винта (7),
в качестве номинального передаточного числа трансмиссии (8) принимают отношение номинальной частоты вращения свободной турбины (3) к частоте вращения несущего винта (7) в условиях, когда третье звено (20) зубчатого дифференциала (16) заблокировано энергонезависимым блокировочным механизмом (17), а частота вращения свободной турбины (3) является номинальной,
из системы управления (13) целевую частоту вращения свободной турбины (3) передают регулятору частоты вращения свободной турбины (6), при помощи которого автоматически обеспечивают достижение и поддержание целевой частоты вращения свободной турбины (3),
система управления (13) вычисляет по запрограммированному алгоритму требуемые частоту и направление вращения первой обратимой электрической машины (11),
в качестве положительного направления вращения первой обратимой электрической машины (11) принимают направление, совпадающее с направлением крутящего момента, действующего на вал первой обратимой электрической машины (11) со стороны третьего звена зубчатого дифференциала (20),
в качестве отрицательного направления вращения первой обратимой электрической машины (11) принимают направление, противоположное направлению крутящего момента, действующего на вал первой обратимой электрической машины (11) со стороны третьего звена зубчатого дифференциала (20),
отключают энергонезависимый блокировочный механизм (17), при этом,
если целевое передаточное число трансмиссии (8) больше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) не меньше номинального значения, то первую обратимую электрическую машину (11) вращают в положительном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения,
если целевое передаточное число трансмиссии (8) больше текущего передаточного числа трансмиссии (8) и текущее передаточное число меньше номинального значения, то первую обратимую электрическую машину (11) вращают в отрицательном направлении, уменьшая частоту вращения до нуля, далее вращают в положительном направлении, увеличивая частоту вращения трансмиссии (8) до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения,
если целевое передаточное число трансмиссии (8) меньше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) не больше номинального значения, то первую обратимую электрическую машину (11) вращают в отрицательном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения,
если целевое передаточное число трансмиссии (8) меньше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) больше номинального значения, то первую обратимую электрическую машину (11) вращают в положительном направлении, уменьшая частоту вращения до нуля, далее вращают в отрицательном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения.
Кроме того, в случае отказа электросистемы (9) или системы управления (13), способного привести к невозможности контроля и управления частотой вращения первой обратимой электрической машиной (11), энергонезависимым блокировочным механизмом (17) автоматически или под управлением пилота выполняют ограничение вращения или плавное замедление до полной остановки третьего звена зубчатого дифференциала (20), а с помощью регулятора частоты вращения свободной турбины (6) управляют впрыском топлива так, чтобы поддерживать номинальную величину частоты вращения свободной турбины (3).
В результате использования заявляемой группы изобретений достигается технический результат:
- улучшение летно-технических характеристик винтокрылого летательного аппарата за счет того, что вариативность электромеханической бесступенчатой трансмиссии (8) обеспечивает возможность использования оптимальной частоты вращения несущего винта (7), отличающейся для каждого режима полета;
- снижение расхода топлива при эксплуатации винтокрылого летательного аппарата за счет того, что вариативность электромеханической бесступенчатой трансмиссии (8) обеспечивает возможность перевода несущего винта (7) в режим наименьшего энергопотребления, обеспечивает возможность перевода свободной турбины (3) газотурбинного двигателя (1) в режим наибольшего возможного коэффициента полезного действия (далее - КПД) для каждого режима полета отдельно;
- снижение частоты вращения несущего винта (7) высокоскоростного винтокрылого летательного аппарата на величину не менее 20% от номинальной за счет того, что вариативность электромеханической бесступенчатой трансмиссии (8) обеспечивает возможность изменения передаточного числа между свободной турбиной (3) газотурбинного двигателя (1) и несущим винтом (7) в достаточном диапазоне;
- повышение отказобезопасности винтокрылого летательного аппарата, оснащенного электромеханической бесступенчатой трансмиссией (8) за счет того, что блокировочный механизм (17) является энергонезависимым;
- изменение передаточного числа трансмиссии (8) в широком диапазоне не менее 20%, за счет включения в кинематическую цепь трансмиссии (8) между свободной турбиной (3) газотурбинного двигателя (1) зубчатого дифференциала (16), третье звено (20) которого механически связано с первой обратимой электрической машиной (11), вследствие чего частота вращения несущего винта (7) изменяется в зависимости от изменения частоты и направления вращения первой обратимой электрической машины (11) даже при постоянстве частоты вращения свободной турбины (3) газотурбинного двигателя (1);
- сбалансированность электросистемы (9) по генерации и потреблению электроэнергии, за счет применения способа, при котором электросистема (9) обменивается энергией с валом компрессора (5) газотурбинного двигателя (1);
- снижение массы пустого винтокрылого летательного аппарата, за счет применения минимально возможного количества электромашин, совмещающих в себе функции агрегатов трансмиссии (8) и элементов электросистемы (9);
- сглаживание переходных электромеханических процессов в электросистеме (9) за счет использования аккумуляторной батареи (10) в буферном режиме.
Краткое описание чертежей
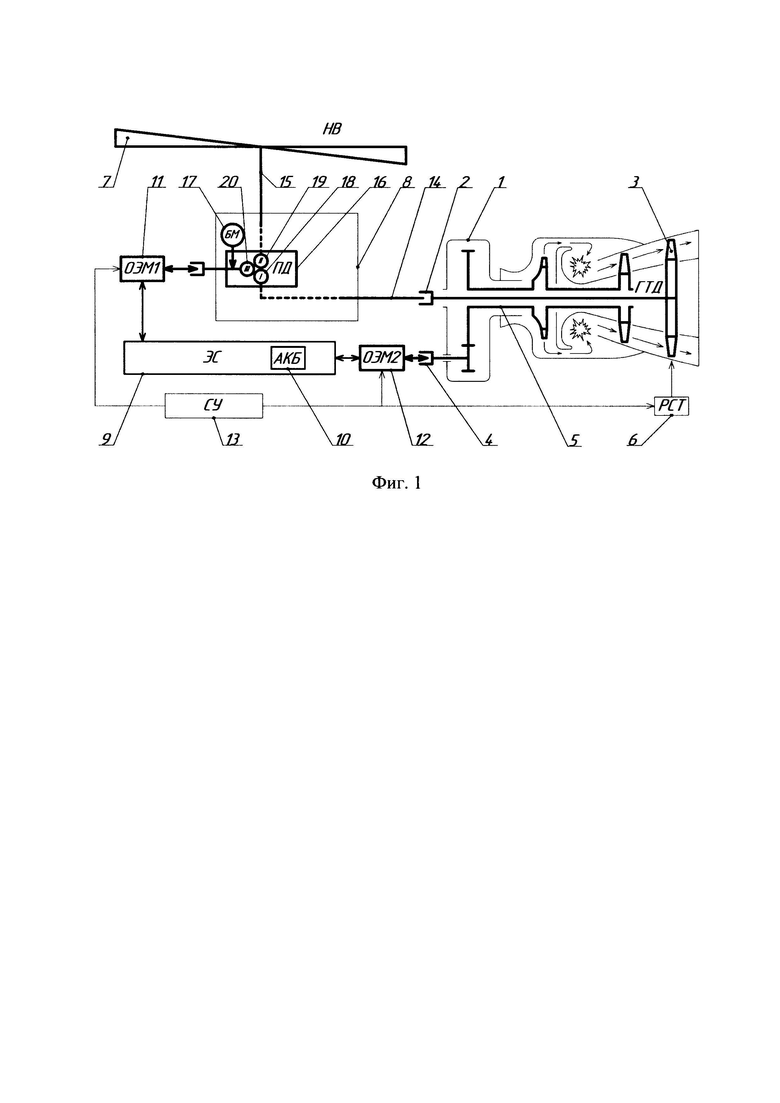
На фиг. 1 показана структурная схема винтокрылого летательного аппарата с электромеханической бесступенчатой трансмиссией.
Осуществление изобретения
Структурная схема винтокрылого летательного аппарата, соответствующего данному изобретению, представлена на фиг. 1.
Винтокрылый летательный аппарат по схеме фиг. 1, включает в себя фюзеляж, в котором установлены:
- минимум один газотурбинный двигатель (1), в котором имеются: выходной вал (2), кинематически соединенный со свободной турбиной (3), привод стартера (4), кинематически соединенный с валом компрессора (5), управляемый регулятор частоты вращения свободной турбины (6);
- минимум один несущий винт (7);
- трансмиссию (8), в которой имеются: входной вал трансмиссии (14), кинематически соединенный с выходным валом (2) газотурбинного двигателя (1), выходной вал трансмиссии (15) кинематически соединенный с несущим винтом (7), зубчатый дифференциал (16), содержащий первое (18), второе (19) и третье (20) звенья зубчатого дифференциала, при этом: первое звено зубчатого дифференциала (18) кинематически соединено с входным валом трансмиссии (14), второе звено зубчатого дифференциала (19) кинематически соединено с выходным валом трансмиссии (15);
- электросистему (9), включающую в себя: аккумуляторную батарею (10), первую обратимую электрическую машину (11), кинематически связанную с третьим звеном зубчатого дифференциала (20) и вторую обратимую электрическую машину (12), кинематически соединенную с приводом стартера (4) газотурбинного двигателя (1), бортовые электропотребители;
- систему управления (13);
- энергонезависимый блокировочный механизм (17), предназначенный для блокировки и разблокировки третьего звена зубчатого дифференциала (20).
Первая (11) и вторая (12) обратимые электрические машины электрически связаны между собой и аккумуляторной батареей (10) через электросистему (9), первая (11) и вторая (12) обратимые электрические машины и регулятор частоты вращения свободной турбины (6) контролируются и управляются системой управления (13).
В описанном выше винтокрылом летательном аппарате, соответствующем данному изобретению, может быть установлена дополнительная электрическая машина, кинематически соединенная с входным валом трансмиссии (14), или с выходным валом трансмиссии (15), а электрически соединена с электросистемой (9).
Зубчатый дифференциал (16) является механизмом с двумя степенями свободы и предназначен для преобразования движения двух входных звеньев первого (18) и третьего (20) зубчатого дифференциала в движение второго звена зубчатого дифференциала (19).
Устройство работает следующим образом.
Запуск газотурбинного двигателя (1) осуществляют при помощи второй обратимой электрической машины (12), которая в режиме стартера раскручивает вал компрессора (5). Электропитание осуществляют от аккумуляторной батареи (10) или от наземного источника.
В результате запуска газотурбинного двигателя (1) производят раскрутку трансмиссии (8) и несущего винта (7) до частоты вращения режима земного малого газа, при этом третье звено зубчатого дифференциала (20) блокируют энергонезависимым блокировочным механизмом (17), энергоснабжение электросистемы (9) осуществляют от второй обратимой электрической машины (12), которую после запуска газотурбинного двигателя переключают в режим генератора.
Осуществляют переход от режима земного малого газа к режиму автоматического поддержания номинальной частоты вращения свободной турбины (3) при помощи регулятора частоты вращения свободной турбины (6).
После взлета винтокрылого летательного аппарата и набора высоты экипаж может принять решение о переходе на режим полета с изменяемым передаточным числом трансмиссии.
В предлагаемом винтокрылом летательном аппарате реализована возможность изменения передаточного числа трансмиссии (8) для улучшения летно-технических характеристик, которая осуществляется за счет применения электромеханической трансмиссии (8) следующим образом.
В систему управления (13) передают целевые и текущие значения частот вращения несущего винта (7) и свободной турбины (3) газотурбинного двигателя (1), номинальные значения: частоты вращения свободной турбины (3) газотурбинного двигателя (1), электрического напряжения и частоты переменного тока для систем переменного тока электросистемы (9) и диапазоны допустимых значений этих параметров.
Целевыми являются значения частот вращения несущего винта (7) и свободной турбины (3), на которых энергопотребление несущего винта (7) в текущих условиях полета является минимальным, а КПД свободной турбины (3) газотурбинного двигателя (1) является максимальным.
Текущими значениями параметров являются фактические величины параметров в данный момент времени, полученные в результате измерения.
Номинальными значениями параметров являются величины параметров, заданные в технической документации, которые служат началом отсчета предельных отклонений.
Диапазонами допустимых значений параметров являются области значений между их минимальными допустимыми и максимальными допустимыми значениями.
В качестве номинального передаточного числа трансмиссии (8) принимают отношение номинальной частоты вращения свободной турбины (3) к частоте вращения несущего винта (7) в условиях, когда третье звено зубчатого дифференциала (20) заблокировано энергонезависимым блокировочным механизмом (17), а частота вращения свободной турбины (3) является номинальной.
Система управления (13) по запрограммированному алгоритму вычисляет текущее передаточное число трансмиссии (8) как отношение текущей частоты вращения свободной турбины (3) к текущей частоте вращения несущего винта (7), и целевое передаточное число трансмиссии (8) как отношение целевой частоты вращения свободной турбины (3) к целевой частоте вращения несущего винта (7).
Из системы управления (13) величину целевой частоты вращения свободной турбины (3) передают управляемому регулятору частоты вращения свободной турбины (6), при помощи которого автоматически управляют свободной турбиной (3) путем дозирования впрыска топлива, и обеспечивают достижение и поддержание целевой частоты вращения свободной турбины (3).
Система управления (13) вычисляет по запрограммированному алгоритму требуемые частоту и направление вращения первой обратимой электрической машины (11).
В качестве положительного направления вращения первой обратимой электрической машины (11) принимают направление, совпадающее с направлением крутящего момента, действующего на вал первой обратимой электрической машины (11) со стороны третьего звена зубчатого дифференциала (20).
В качестве отрицательного направления вращения первой обратимой электрической машины (11) принимают направление, противоположное направлению крутящего момента, действующего на вал первой обратимой электрической машины (11) со стороны третьего звена зубчатого дифференциала (20).
Отключают энергонезависимый блокировочный механизм (17) и одновременно приводят во вращение первую обратимую электрическую машину (11).
Если целевое передаточное число трансмиссии (8) больше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) не меньше номинального значения, то первую управляемую обратимую электрическую машину (11) вращают в положительном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения.
Если целевое передаточное число трансмиссии (8) больше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) меньше номинального значения, то первую управляемую обратимую электрическую машину (11) вращают в отрицательном направлении, уменьшая частоту вращения до нуля, далее вращают в положительном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения.
Если целевое передаточное число трансмиссии (8) меньше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) не больше номинального значения, то первую управляемую обратимую электрическую машину (11) вращают в отрицательном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения.
Если целевое передаточное число трансмиссии (8) меньше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) больше номинального значения, то первую управляемую обратимую электрическую машину (11) вращают в положительном направлении, уменьшая частоту вращения до нуля, далее вращают в отрицательном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения.
Если винтокрылый летательный аппарат спроектирован таким образом, что номинальное передаточное число трансмиссии (8) одновременно является максимальным установленным для винтокрылого летательного аппарата, то звено зубчатого дифференциала (20) вращают только в отрицательном направлении, первая обратимая электрическая машина (11) работает только в двигательном режиме, а вторую обратимую электрическую машину (12) включают только в генераторном режиме.
Если винтокрылый летательный аппарат спроектирован таким образом, что номинальное передаточное число трансмиссии (8) одновременно является минимальным установленным для летательного аппарата, то третье звено зубчатого дифференциала (20) вращают только в положительном направлении, первая обратимая электрическая машина (11) работает только в генераторном режиме, а вторую обратимую электрическую машину (12) включают только в двигательном режиме.
Предлагаемый способ балансировки мощности электросистемы летательного аппарата при изменении передаточного числа электромеханической трансмиссии (8) осуществляется следующим образом.
Для того чтобы электросистема (9) сохраняла сбалансированность по производству и потреблению электроэнергии, что необходимо для обеспечения работоспособности электрооборудования, с учетом изменения режимов работы первой обратимой электрической машины (11), вторую обратимую электрическую машину (12) попеременно включают в режим генератора или двигателя.
Если при изменении передаточного числа трансмиссии (8) за счет включения первой обратимой электрической машины (11) электрическое напряжение или частота переменного тока в электросистеме (9) повышаются относительно номинальных значений и выходят за пределы диапазона допустимых значений, вторую обратимую электрическую машину (12) переводят в моторный режим и сообщают таким образом энергию валу компрессора (5) газотурбинного двигателя (1). Потребляемую мощность второй обратимой электрической машины (12) увеличивают до тех пор, пока электрическое напряжение и частота переменного тока в электросистеме (9) не уменьшатся до величины, находящейся в диапазоне допустимых значений.
Если при изменении передаточного числа трансмиссии (8) за счет включения первой обратимой электрической машины (11) электрическое напряжение или частота переменного тока в электросистеме (9) уменьшаются относительно номинальных значений и выходят за пределы диапазона допустимых значений, вторую обратимую электрическую машину (12) переводят в генераторный режим и передают энергию от вала компрессора (5) газотурбинного двигателя (1) в электросистему (9). Генерируемую мощность второй электрической машины (12) увеличивают до тех пор, пока электрическое напряжение и частота переменного тока в электросистеме (9) не увеличатся до величины, находящейся в диапазоне допустимых значений.
Если электросистема (9) является системой постоянного тока, то вышеуказанные действия выполняют, контролируя только величину электрического напряжения.
Решение задачи сглаживания переходных электромеханических процессов осуществляют с помощью аккумуляторной батареи (10), подключенной в буферном режиме. Механические звенья трансмиссии (8), несущий винт (7), свободная турбина (3) и вал компрессора (5) обладают значительной инерцией, поэтому при балансировке электросистемы (9) предлагаемым способом изменение режима работы первой (11) и второй (12) обратимых электрических машин может происходить недостаточно быстро. Вследствие этого не исключено возникновение кратковременных переходных электромеханических процессов по причине недостаточной генерации или потребления электроэнергии в электросистеме (9).
Данные переходные процессы могут выражаться, например, в существенных кратковременных отклонениях электрического напряжения или частоты тока от номинальных величин. Аккумуляторная батарея (10), подключенная в буферном режиме начинает разряжаться, устраняя временный дефицит электроэнергии, или начинает заряжаться, устраняя временный избыток электроэнергии в электросистеме (9).
Решение задачи отказобезопасности обеспечивают энергонезависимым блокировочным механизмом (17). В случае отказа электросистемы (9) или системы управления (13), способного привести к потере контроля над вращением первой обратимой электромашины (11), или при принятии экипажем решения о прекращении полета с изменяемым передаточным числом трансмиссии (8), энергонезависимым блокировочным механизмом (17) автоматически или под управлением пилота ограничивают вращение и плавно прекращают вращение третьего звена зубчатого дифференциала (20). При этом частоту вращения несущего винта (7) плавно возвращают к номинальному значению. Регулятору частоты вращения свободной турбины (6) задают номинальную величину частоты вращения свободной турбины (3), а регулятор частоты вращения свободной турбины (6) автоматически плавно приводит частоту вращения свободной турбины (3) к номинальной величине.
Дополнительные возможности пилотирования винтокрылого летательного аппарата, соответствующего заявляемому изобретению, используют за счет того, что вторая обратимая электрическая машина (12) механически соединена с валом компрессора (5) газотурбинного двигателя (1), вследствие чего в течение полета повышают приемистость вала компрессора (5) газотурбинного двигателя (1), иными словами, повышают время изменения режима работы двигателя в сторону заданного увеличения оборотов, при этом сохраняя запасы по помпажу при переходных режимах.
Также, при наличии двух и более газотурбинных двигателей (1), переводят винтокрылый летательный аппарат в режим полета на одном двигателе, с отключением остальных и последующей реактивацией при необходимости. Таким образом повышают эксплуатационные характеристики винтокрылого летательного аппарата, а именно: улучшают летно-технические характеристики и снижают удельный расход топлива.
Посадку винтокрылого летательного аппарата осуществляют при номинальных значениях частоты вращения несущего винта (7) и свободной турбины (3). Для чего, при помощи системы управления (13) плавно переводят частоту и направление вращения первой обратимой электрической машины (11) к значению, при котором передаточное число трансмиссии (8) достигает номинальной величины, управляемому регулятору частоты вращения свободной турбины (6) задают номинальную величину частоты вращения свободной турбины (3) и регулятор частоты вращения свободной турбины (6) автоматически приводит частоту вращения свободной турбины (3) к номинальной частоте вращения. В этих условиях частота вращения несущего винта (7) плавно возвращается к номинальному значению.
Таким образом, винтокрылый летательный аппарат (фиг. 1) с электромеханической бесступенчатой трансмиссией (8), особенностью конструкции которого является механическое соединение второй обратимой электрической машины (12) с валом компрессора (5) газотурбинного двигателя (1), благодаря которым возможно применение предлагаемого способа балансировки мощности электросистемы (9) за счет обмена энергией с валом компрессора (5) газотурбинного двигателя (1), имеет в целом ряд особенностей и преимуществ по сравнению с прототипом.
Снижение массы в данном изобретении обеспечивается за счет совмещения функций первой (11) и второй (12) обратимых электрических машин, как агрегатов трансмиссии (8) и как элементов общей электросистемы (9). Первая (11) и вторая (12) обратимые электрические машины используются не только в качестве агрегатов для управления передаточным числом трансмиссии (8), но и в качестве источника электроэнергии для электросистемы (9). Таким образом, возможно исключение из состава винтокрылого летательного аппарата специальной системы электрогенерации для питания бортовых потребителей. Механическое соединение второй обратимой электрической машины (12) с приводом стартера (4) газотурбинного двигателя (1) позволяет использовать вторую обратимую электрическую машину (12) в качестве стартера и исключить из состава винтокрылого летательного аппарата специальную систему электрозапуска по сравнению с прототипом.
Повышение отказобезопасности трансмиссии (8) в данном изобретении обеспечивается включением в состав конструкции энергонезависимого блокировочного механизма (17), предотвращающего неконтролируемое вращение третьего звена зубчатого дифференциала (20) в случае отказа электросистемы (9) или системы управления (13), способного привести к потере контроля над вращением первой обратимой электромашины (11). Такое устройство может быть сочетанием фрикционного или гидравлического тормоза с фиксатором, управляемым пилотом при помощи механической или гидравлической системы управления (13), не связанной с электросистемой (9). Также возможно применение центробежного или другого не связанного с электросистемой автоматического устройства для ограничения частоты или плавной блокировки вращения третьего звена зубчатого дифференциала (20). В отличие от прототипа, в котором используется обгонная муфта, заявляемое техническое решение позволяет предотвратить возникновение повышенных динамических нагрузок на элементы трансмиссии (8) при отказе электросистемы (9).
Дополнительные возможности пилотирования винтокрылого летательного аппарата и снижение расхода топлива в данном изобретении обеспечиваются за счет того, что вторая обратимая электрическая машина (12) механически соединена с валом компрессора (5) газотурбинного двигателя (1), что позволяет:
- повысить приемистость вала компрессора (5) газотурбинного двигателя (1) при переходных режимах с сохранением запасов по помпажу,
- ускорить замедление вала компрессора (5) газотурбинного двигателя (1) при переходных режимах с рекуперацией энергии,
- реализовать способ оптимизации удельного расхода топлива винтокрылого аппарата, имеющего минимум два газотурбинных двигателя (1), за счет того, что в течение полета осуществляется переход на полет на одном газотурбинном двигателе (1), а остальные отключаются или переводятся в режим готовности к ускоренному запуску с последующей реактивацией.
Изобретение относится к области авиации, в частности к конструкциям трансмиссий винтокрылых летательных аппаратов. Винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией содержит газотурбинный двигатель (1), включающий в себя выходной вал (2), кинематически соединенный со свободной турбиной (3), привод стартера (4), кинематически соединенный с валом компрессора (5), несущий винт (7), трансмиссию (8). Входной вал (14), кинематически соединен с выходным валом (2) газотурбинного двигателя (1). Выходной вал трансмиссии (15) соединен с несущим винтом (7). Зубчатый дифференциал (16) содержит первое (18), второе (19) и третье (20) звенья. Первое звено зубчатого дифференциала (18) соединено с входным валом трансмиссии (14), второе звено зубчатого дифференциала (19) соединено с выходным валом трансмиссии (15). Электросистема (9) включает в себя аккумуляторную батарею (10), первую обратимую электрическую машину (11), которая кинематически связана с третьим звеном зубчатого дифференциала (20), и вторую обратимую электрическую машину (12). Достигается сбалансированность электросистемы по генерации и потреблению электроэнергии. 2 н. и 6 з.п. ф-лы, 1 ил.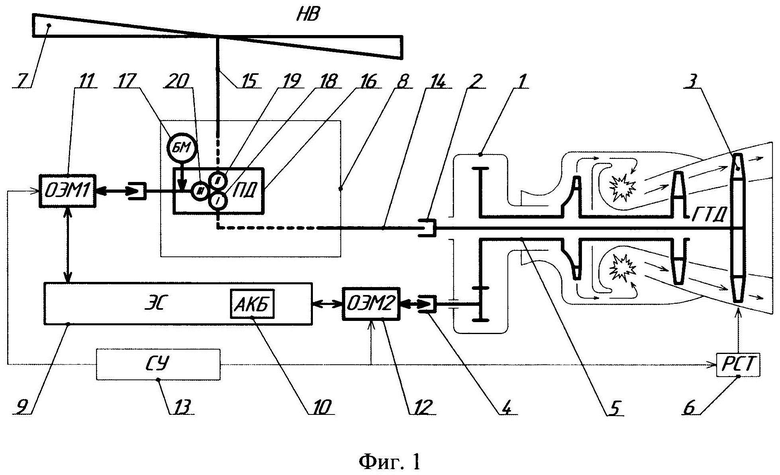
1. Винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией, содержащий
минимум один газотурбинный двигатель (1), включающий в себя выходной вал (2), кинематически соединенный со свободной турбиной (3), привод стартера (4), кинематически соединенный с валом компрессора (5),
минимум один несущий винт (7),
трансмиссию (8), включающую в себя входной вал (14), кинематически соединенный с выходным валом (2) газотурбинного двигателя (1), выходной вал трансмиссии (15), кинематически соединенный с несущим винтом (7), зубчатый дифференциал (16), содержащий первое (18), второе (19) и третье (20) звенья зубчатого дифференциала, при этом первое звено зубчатого дифференциала (18) кинематически соединено с входным валом трансмиссии (14), второе звено зубчатого дифференциала (19) кинематически соединено с выходным валом трансмиссии (15),
электросистему (9), включающую в себя аккумуляторную батарею (10), первую обратимую электрическую машину (11), которая кинематически связана с третьим звеном зубчатого дифференциала (20), и вторую обратимую электрическую машину (12), бортовые электропотребители,
отличающийся тем, что
винтокрылый летательный аппарат оснащен системой управления (13), посредством которой осуществляется управление первой (11), второй (12) обратимыми электрическими машинами и регулятором частоты вращения свободной турбины (6) в автоматическом режиме,
первая (11) и вторая (12) обратимые электрические машины электрически связаны между собой и аккумуляторной батареей (10) через электросистему (9),
вторая обратимая электрическая машина (12) кинематически соединена с приводом стартера (4) газотурбинного двигателя (1),
энергонезависимый блокировочный механизм (17) кинематически соединен с третьим звеном зубчатого дифференциала (20).
2. Винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией по п. 1, отличающийся тем, что в нем дополнительно установлены механическая, или гидравлическая, или электрическая, или гибридная хвостовая трансмиссия и устройство компенсации реактивного момента несущего винта (7).
3. Винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией по любому из пп. 1 или 2, отличающийся тем, что в нем дополнительно установлены пропульсивные движители и механическая, или гидравлическая, или электрическая трансмиссия для их привода.
4. Винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией по любому из пп. 1-3, отличающийся тем, что в нем установлена минимум одна дополнительная обратимая электрическая машина, которая кинематически соединена с выходным валом трансмиссии (15) или входным валом трансмиссии (14), а электрически связана с электросистемой (9).
5. Винтокрылый летательный аппарат с электромеханической бесступенчатой вариативной трансмиссией по любому из пп. 1-4, отличающийся тем, что в нем дополнительно установлены газотурбинный двигатель, кинематически не связанный с трансмиссией (8) несущего винта (7), и дополнительная управляемая обратимая электрическая машина, кинематически связанная с выходным валом или приводом стартера дополнительного газотурбинного двигателя, а электрически связанная с электросистемой (9).
6. Способ балансировки мощности электросистемы летательного аппарата, характеризующийся тем, что в течение полета:
в систему управления (13) передают целевые и текущие значения частот вращения несущего винта (7) и свободной турбины (3) газотурбинного двигателя (1), номинальные значения частоты вращения свободной турбины (3) газотурбинного двигателя (1), электрического напряжения и/или частоты переменного тока электросистемы (9),
выполняют операцию изменения передаточного числа в электромеханической бесступенчатой вариативной трансмиссии (8),
при этом контролируют энергетический баланс электросистемы (9) путем измерения текущего значения электрического напряжения и/или частоты переменного тока и сравнения этих значений с номинальными значениями,
при этом в случае выхода за пределы диапазона допустимых значений показателей электрического напряжения и/или частоты переменного тока реализуют алгоритм, согласно которому
в случае повышения электрического напряжения и/или частоты переменного тока в электросистеме (9) относительно номинальных значений обеспечивают балансировку мощности, для чего переводят вторую обратимую электрическую машину (12) в моторный режим и, сообщая энергию валу компрессора (5) газотурбинного двигателя (1), увеличивают потребляемую мощность второй обратимой электрической машины (12) до тех пор, пока электрическое напряжение и/или частота переменного тока в электросистеме (9) не уменьшатся до величин, находящихся внутри диапазона допустимых значений,
в случае понижения электрического напряжения или частоты переменного тока в электросистеме (9) относительно номинальных значений обеспечивают балансировку мощности, для чего переводят вторую обратимую электрическую машину (12) в генераторный режим и, отбирая энергию от вала компрессора (5) газотурбинного двигателя (1), увеличивают генерируемую второй обратимой электрической машиной (12) мощность до тех пор, пока электрическое напряжение и/или частота переменного тока в электросистеме (9) не увеличатся до величин, находящихся внутри диапазона допустимых значений.
7. Способ балансировки мощности электросистемы летательного аппарата по п. 6, отличающийся тем, что для выполнения операции изменения передаточного числа
система управления (13) по запрограммированному алгоритму вычисляет текущее передаточное число трансмиссии (8) как отношение текущей частоты вращения свободной турбины (3) к текущей частоте вращения несущего винта (7), целевое передаточное число трансмиссии (8) как отношение целевой частоты вращения свободной турбины (3) к целевой частоте вращения несущего винта (7),
в качестве номинального передаточного числа трансмиссии (8) принимают отношение номинальной частоты вращения свободной турбины (3) к частоте вращения несущего винта (7) в условиях, когда третье звено (20) зубчатого дифференциала (16) заблокировано энергонезависимым блокировочным механизмом (17), а частота вращения свободной турбины (3) является номинальной,
из системы управления (13) целевую частоту вращения свободной турбины (3) передают регулятору частоты вращения свободной турбины (6), при помощи которого автоматически обеспечивают достижение и поддержание целевой частоты вращения свободной турбины (3),
система управления (13) вычисляет по запрограммированному алгоритму требуемые частоту и направление вращения первой обратимой электрической машины (11),
в качестве положительного направления вращения первой обратимой электрической машины (11) принимают направление, совпадающее с направлением крутящего момента, действующего на вал первой обратимой электрической машины (11) со стороны третьего звена зубчатого дифференциала (20),
в качестве отрицательного направления вращения первой обратимой электрической машины (11) принимают направление, противоположное направлению крутящего момента, действующего на вал первой обратимой электрической машины (11) со стороны третьего звена зубчатого дифференциала (20),
отключают энергонезависимый блокировочный механизм (17), при этом,
если целевое передаточное число трансмиссии (8) больше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) не меньше номинального значения, то первую обратимую электрическую машину (11) вращают в положительном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения,
если целевое передаточное число трансмиссии (8) больше текущего передаточного числа трансмиссии (8) и текущее передаточное число меньше номинального значения, то первую обратимую электрическую машину (11) вращают в отрицательном направлении, уменьшая частоту вращения до нуля, далее вращают в положительном направлении, увеличивая частоту вращения трансмиссии (8) до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения,
если целевое передаточное число трансмиссии (8) меньше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) не больше номинального значения, то первую обратимую электрическую машину (11) вращают в отрицательном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения,
если целевое передаточное число трансмиссии (8) меньше текущего передаточного числа трансмиссии (8) и текущее передаточное число трансмиссии (8) больше номинального значения, то первую обратимую электрическую машину (11) вращают в положительном направлении, уменьшая частоту вращения до нуля, далее вращают в отрицательном направлении, увеличивая частоту вращения до тех пор, пока текущее значение передаточного числа трансмиссии (8) не достигнет целевого значения.
8. Способ балансировки мощности электросистемы летательного аппарата по любому из пп. 6 или 7, отличающийся тем, что в случае отказа электросистемы (9) или системы управления (13), способного привести к невозможности контроля и управления частотой вращения первой обратимой электрической машиной (11), энергонезависимым блокировочным механизмом (17) автоматически или под управлением пилота выполняют ограничение вращения или плавное замедление до полной остановки третьего звена зубчатого дифференциала (20), а с помощью регулятора частоты вращения свободной турбины (6) управляют впрыском топлива так, чтобы поддерживать номинальную величину частоты вращения свободной турбины (3).
| СБОРКА ТРАНСМИССИИ ДЛЯ ВОЗДУШНОГО СУДНА И ВЕРТОЛЕТ | 2015 |
|
RU2672536C2 |
| РЕГУЛИРУЕМАЯ ТРАНСМИССИЯ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2525353C1 |
| US 20170247114 A1, 31.08.2017 | |||
| US 20140145028 A1, 29.05.2014 | |||
| US 20120025032 A1, 02.02.2012. | |||

