Изобретение относится к области управления ориентацией и движением центра масс космических аппаратов (КА).
Известен способ управления К А с помощью реактивных исполнительных органов [1], направленный на получение максимального значения скорости коррекции орбиты КА с минимальными ошибками управления при одновременном применении реактивных двигателей ориентации (ДО) и силовых гироскопов (СГ).
В указанном способе определяют требуемое значение скорости коррекции орбиты КА и параметры его ориентации, формируют управляющие силы и моменты посредством ДО, поддерживая ориентацию КА с помощью СГ. При этом отслеживают и прогнозируют процесс насыщения СГ, проверяя условие принадлежности соответствующих значений кинетического момента в системе СГ области его располагаемых значений, по результатам чего определяют временную последовательность и векторы управляющих моментов для разгрузки СГ. Далее, для создания управляющих моментов отключают некоторые ДО, либо включают пару ДО, не участвующих в коррекции орбиты.
Рассмотренный способ позволяет, не прекращая процесс коррекции орбиты, производить разгрузку СГ от накопленного кинетического момента. Совмещение двух указанных динамических режимов оптимизирует программу полета КА, уменьшает затраты полетного времени на выполнение динамических операций.
Недостаток способа заключается в том, что в процессе коррекции орбиты проверяется и реализуется выполнение условия принадлежности суммарного вектора кинетического момента  только области располагаемых значений вектора кинетического момента S,
только области располагаемых значений вектора кинетического момента S,  ∈S. При этом не обеспечиваются начальные условия
∈S. При этом не обеспечиваются начальные условия  на момент времени t0 начала последующего динамического режима, обеспечивающие последующее управление КА с помощью СГ без затрат рабочего тела ДО.
на момент времени t0 начала последующего динамического режима, обеспечивающие последующее управление КА с помощью СГ без затрат рабочего тела ДО.
Этот недостаток устраняется в способе управления кинетическим моментом КА в процессе коррекции орбиты, принятым за прототип [2]. Способ включает в себя определение требуемого значения скорости коррекции орбиты КА и поддержание его заданной ориентации с помощью СГ в процессе коррекции с использованием i-x ДО, где i=1, 2, …, n - номера двигателей. Определение текущих значений суммарного вектора кинетического момента космического аппарата по измеренным значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, а также по известным значениям его тензора инерции. Прогноз изменений вектора с учетом его значений на момент времени начала коррекции t0 , в процессе коррекции орбиты i-ми двигателями ориентации, объединенными в группы Σ(i) с учетом последовательности включений и продолжительности работы. Выбор Σ(i)-x групп двигателей ориентации, обеспечивающих проведение коррекции орбиты и разгрузку системы силовых гироскопов до момента достижения вектором при завершении коррекции орбиты (tK) значений  , находящихся в заданной области приведения кинетического момента SK, ∈SK, принадлежащей, в свою очередь, области располагаемых значений вектора кинетического момента в системе силовых гироскопов S, SK⊂S.
, находящихся в заданной области приведения кинетического момента SK, ∈SK, принадлежащей, в свою очередь, области располагаемых значений вектора кинетического момента в системе силовых гироскопов S, SK⊂S.
Недостаток указанного способа заключается в том, что управление вокруг центра масс ведется только с использованием ДО без использования управляющих моментов от внешних сил, тем самым дополнительно расходуется рабочее тело ДО, запасы которого зачастую ограничены. Действие внешних моментов в способе-прототипе рассматривается как возмущающие, а не управляющие. В то же время, используя внутренние возможности КА, предусмотренные его конструкцией, можно создавать управляющие моменты от внешних сил, сопоставимые в порядке величин с моментами от ДО. В конкретном случае предлагается использовать магнитный управляющий момент  , получаемый от взаимодействия магнитных моментов собственных управляемых токовых контуров с магнитным полем Земли (МПЗ).
, получаемый от взаимодействия магнитных моментов собственных управляемых токовых контуров с магнитным полем Земли (МПЗ).
Техническим результатом во вновь разрабатываемом способе управления кинетическим моментом КА в процессе коррекции орбиты является сокращение затрат рабочего тела в ДО за счет использования в процессе коррекции орбиты управляющего магнитного момента для приведения суммарного вектора кинетического момента к заданному значению.
Указанный технический результат достигается тем, что в способе управления кинетическим моментом КА в процессе коррекции орбиты, включающем определение требуемого значения скорости коррекции орбиты КА, поддержание заданной ориентации КА с помощью СГ в процессе коррекции орбиты i-ми ДО, где i=1, 2, …, n - номера двигателей, определение текущих значений суммарного вектора кинетического момента КА по измеренным значениям вектора кинетического момента в системе СГ и вектора угловой скорости КА, а также по известным значениям его тензора инерции, прогноз изменений вектора с учетом его значений на момент времени начала коррекции t0 в процессе коррекции орбиты i-ми ДО, объединенными в группы Σ(i) с учетом последовательности включений и продолжительности работы, выбор Σ(i)-x групп ДО, обеспечивающих проведение коррекции орбиты и разгрузку системы СГ до момента достижения вектором при завершении коррекции орбиты (tK) значений  , находящихся в заданной области приведения кинетического момента SK, ∈SK, принадлежащей, в свою очередь, области располагаемых значений вектора кинетического момента в системе СГ S, SK⊂S, для каждой из групп i-x двигателей Σ'(i), обеспечивающих получение требуемого значения скорости коррекции орбиты помимо ДО для разгрузки системы СГ от накопленного кинетического момента, прогнозируют значения суммарного вектора кинетического момента
, находящихся в заданной области приведения кинетического момента SK, ∈SK, принадлежащей, в свою очередь, области располагаемых значений вектора кинетического момента в системе СГ S, SK⊂S, для каждой из групп i-x двигателей Σ'(i), обеспечивающих получение требуемого значения скорости коррекции орбиты помимо ДО для разгрузки системы СГ от накопленного кинетического момента, прогнозируют значения суммарного вектора кинетического момента  ∈S на момент времени завершения коррекции орбиты tK указанными ДО, определяют значения векторов
∈S на момент времени завершения коррекции орбиты tK указанными ДО, определяют значения векторов  , задающих j-e точки прицеливания для приведения векторов
, задающих j-e точки прицеливания для приведения векторов  в область кинетического момента SK, где j=1, 2, 3… - число векторов, определяют при коррекции орбиты каждой Σ'(i)-й группой ДО вектора рассогласования для приведения суммарного кинетического момента в область SK
в область кинетического момента SK, где j=1, 2, 3… - число векторов, определяют при коррекции орбиты каждой Σ'(i)-й группой ДО вектора рассогласования для приведения суммарного кинетического момента в область SK

прогнозируют на интервале коррекции орбиты каждой Σ'(i)j-й группой ДО изменения суммарного вектора кинетического момента , при условии воздействия на КА управляющих моментов, получаемых от взаимодействия магнитных моментов управляемых токовых контуров КА с МПЗ  направленных противоположно векторам рассогласования
направленных противоположно векторам рассогласования  и в случаях приведения векторов
и в случаях приведения векторов  в заданную область SK при выполнении условия
в заданную область SK при выполнении условия  определяют расход рабочего тела
определяют расход рабочего тела  для каждой из
для каждой из  -x групп ДО, обеспечивающих выполнение указанных условий по j-м векторам, задающим точки прицеливания, и по наименьшему из значений
-x групп ДО, обеспечивающих выполнение указанных условий по j-м векторам, задающим точки прицеливания, и по наименьшему из значений  выбирают
выбирают  -ю группу ДО для коррекции орбиты, далее перед началом проведения коррекции орбиты разворачивают собственные токовые контуры КА до получения при их включении магнитного момента
-ю группу ДО для коррекции орбиты, далее перед началом проведения коррекции орбиты разворачивают собственные токовые контуры КА до получения при их включении магнитного момента  направленного противоположно вектору рассогласования суммарного кинетического момента
направленного противоположно вектору рассогласования суммарного кинетического момента  определенного для
определенного для  -й группы ДО
-й группы ДО

где  - вектор суммарного кинетического момента во время завершения коррекции орбиты tK
- вектор суммарного кинетического момента во время завершения коррекции орбиты tK  -й группой ДО при условии воздействия на КА
-й группой ДО при условии воздействия на КА  а в случае, если
а в случае, если  , определяют дополнительные вектора рассогласования
, определяют дополнительные вектора рассогласования

где  - вектор суммарного кинетического момента во время завершения коррекции орбиты tK Σ'(i)-й группой ДО при условии воздействия на КА
- вектор суммарного кинетического момента во время завершения коррекции орбиты tK Σ'(i)-й группой ДО при условии воздействия на КА  направленных противоположно векторам рассогласования
направленных противоположно векторам рассогласования  определяют группы Σ"(i)-x ДО, выполняющие одновременно с коррекцией орбиты разгрузку системы СГ от кинетического момента
определяют группы Σ"(i)-x ДО, выполняющие одновременно с коррекцией орбиты разгрузку системы СГ от кинетического момента  определяют для каждой из Σ"(i)-x групп ДО расход рабочего тела
определяют для каждой из Σ"(i)-x групп ДО расход рабочего тела  и по наименьшему из значений
и по наименьшему из значений  выбирают
выбирают  -ю группу ДО для коррекции орбиты, далее в процессе коррекции орбиты производят разгрузку системы СГ вышеуказанным образом с использованием магнитного управляющего момента
-ю группу ДО для коррекции орбиты, далее в процессе коррекции орбиты производят разгрузку системы СГ вышеуказанным образом с использованием магнитного управляющего момента  направленного противоположно вектору рассогласования
направленного противоположно вектору рассогласования  определенному для
определенному для  -й группы ДО
-й группы ДО

и при помощи двигателей ориентации, входящих в указанную группу, на величину

где  - вектор суммарного кинетического момента во время завершения коррекции орбиты tK
- вектор суммарного кинетического момента во время завершения коррекции орбиты tK  -й группой ДО при условии воздействия на КА
-й группой ДО при условии воздействия на КА 
Для объяснения технической сути предлагаемого изобретения приведен чертеж.
На чертеже представлена область S системы СГ, состоящей из группы маховиков, матрица направляющих косинусов векторов кинетических моментов роторов которых 

 имеет вид
имеет вид

Область S имеет вид куба с гранями 2 На чертеже показаны также область SK⊂S, годограф суммарного вектора кинетического момента
На чертеже показаны также область SK⊂S, годограф суммарного вектора кинетического момента  с текущими значениями указанного вектора и его значением
с текущими значениями указанного вектора и его значением  на момент времени tK при коррекции орбиты ДО группой i-x двигателей Σ'(i), обеспечивающих получение требуемой скорости коррекции помимо разгрузки системы СГ от накопленного кинетического момента. Показаны также начальное значение вектора кинетического момента
на момент времени tK при коррекции орбиты ДО группой i-x двигателей Σ'(i), обеспечивающих получение требуемой скорости коррекции помимо разгрузки системы СГ от накопленного кинетического момента. Показаны также начальное значение вектора кинетического момента  на момент времени t0 начала коррекции орбиты
на момент времени t0 начала коррекции орбиты  вектора
вектора  - задающие точки прицеливания для приведения векторов
- задающие точки прицеливания для приведения векторов  в область кинетического момента SK.
в область кинетического момента SK.
При этом вектора рассогласования для приведения суммарного кинетического момента при коррекции орбиты каждой Σ'(i)-й группой ДО  в область SK определяются по выражению
в область SK определяются по выражению

где j=1, 2, 3 - число векторов.
Прогноз накопления кинетического момента КА  производится через решение уравнения вращательного движения КА (см.[2]).
производится через решение уравнения вращательного движения КА (см.[2]).

где  - главный вектор внешнего возмущающего момента, учитывающий гравитационные моменты, вызванные влиянием на КА гравитационных полей Земли, Луны и Солнца, магнитного поля Земли (МПЗ) и собственного магнитного момента КА, момента от сил светового давления и др.;
- главный вектор внешнего возмущающего момента, учитывающий гравитационные моменты, вызванные влиянием на КА гравитационных полей Земли, Луны и Солнца, магнитного поля Земли (МПЗ) и собственного магнитного момента КА, момента от сил светового давления и др.;
 - вектор угловой скорости КА; I - тензор инерции КА.
- вектор угловой скорости КА; I - тензор инерции КА.
В качестве примера рассматривается управление КА реактивными двигателями ориентации (ДО) с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг (см.[3]). При коррекции орбиты указанными ДО к корпусу КА прикладывают по трем осям связанного базиса управляющие моменты сил тяг ДО, установленных четырьмя равнотяговыми секциями в двух параллельных боковой плоскости («север-восток») и равноудаленных от нее плоскостях, обеспечивая суммирование проекций этих моментов на ось требуемого управляющего момента и компенсацию по остальным осям. При этом коррекцию орбиты КА по двум направлениям (связанным осям, например, «север-юг» и «запад-восток») производят тягами ДО, проекции которых совпадают с данными направлениями (осями), а возмущающие моменты по этим осям взаимно компенсируются.
Для создания по третьей оси момента, противоположного возмущающему, применяют ДО с взаимной компенсацией их моментов и тяг по указанным осям. Значения проекций сил и моментов реактивных двигателей (РД) ориентации в проекциях на оси связанного базиса OXYZ представлены в таблице.
Разгрузка СГ производится путем приведения  в заданную область SK, в которой он должен быть после завершения коррекции орбиты. Для достижения максимальной эффективности разгрузки необходимо, чтобы вектор
в заданную область SK, в которой он должен быть после завершения коррекции орбиты. Для достижения максимальной эффективности разгрузки необходимо, чтобы вектор  и вектор разгрузочного момента от ДО
и вектор разгрузочного момента от ДО  были противоположно направлены. Причем, чем тупой угол между указанными векторами ближе к развернутому углу, тем быстрее происходит разгрузка системы СГ.
были противоположно направлены. Причем, чем тупой угол между указанными векторами ближе к развернутому углу, тем быстрее происходит разгрузка системы СГ.
Исходя из указанного условия, выбираются i-e ДО, где i=1, 2, …, n - номера двигателей (в рассмотренном примере n=8), с помощью которых выполняется разгрузка и коррекция орбиты. При этом для заданного значения скорости коррекции КА  необходимо выдать в заданном направлении определенный импульс тяги ДО
необходимо выдать в заданном направлении определенный импульс тяги ДО 
Δti, где Pi, Δti - тяга i-го ДО и продолжительность его работы соответственно. Указанный импульс может быть получен как при непрерывной работе двигателей, так и при определенных последовательности их включений и продолжительности работы. В большинстве случаев для приведения вектора  в заданную область SK требуются дополнительные включения ДО, не связанные непосредственно с коррекцией орбиты КА. Это могут быть пары ДО или ДО, специально включаемые в процессе коррекции для указанного приведения вектора
в заданную область SK требуются дополнительные включения ДО, не связанные непосредственно с коррекцией орбиты КА. Это могут быть пары ДО или ДО, специально включаемые в процессе коррекции для указанного приведения вектора  Например, двигатели, установленные под углом к осям связанного базиса, векторы тяг которых не совпадают с вектором
Например, двигатели, установленные под углом к осям связанного базиса, векторы тяг которых не совпадают с вектором  имеющие некомпенсированные значения управляющих моментов, являющихся одновременно разгрузочными моментами
имеющие некомпенсированные значения управляющих моментов, являющихся одновременно разгрузочными моментами  для системы СГ. Группы i-x двигателей, объединенных по номерам, последовательности включений и продолжительности работы, для решения задач коррекции и разгрузки обозначены через Σ(i). А группы указанных ДО, обеспечивающие получение требуемого значения скорости коррекции без дополнительных включений ДО для разгрузки СГ, обозначены через Σ'(i). Тогда на проведение указанных динамических операций расход массы рабочего тела (m) в однотипных ДО соответствует неравенству
для системы СГ. Группы i-x двигателей, объединенных по номерам, последовательности включений и продолжительности работы, для решения задач коррекции и разгрузки обозначены через Σ(i). А группы указанных ДО, обеспечивающие получение требуемого значения скорости коррекции без дополнительных включений ДО для разгрузки СГ, обозначены через Σ'(i). Тогда на проведение указанных динамических операций расход массы рабочего тела (m) в однотипных ДО соответствует неравенству

Для исключения или сокращения затрат рабочего тела на разгрузки СГ с приведением вектора  в заданную область S'K, предлагается использовать в процессе коррекции орбиты магнитный управляющий момент
в заданную область S'K, предлагается использовать в процессе коррекции орбиты магнитный управляющий момент  получаемый от взаимодействия магнитных моментов собственных токовых контуров КА с МПЗ. Выбор указанного
получаемый от взаимодействия магнитных моментов собственных токовых контуров КА с МПЗ. Выбор указанного  из общего списка составляющих главного вектора возмущающего момента
из общего списка составляющих главного вектора возмущающего момента  связан с возможностью его направленного приложения к корпусу КА и получения при этом величин указанного момента, сопоставимых с порядком величин
связан с возможностью его направленного приложения к корпусу КА и получения при этом величин указанного момента, сопоставимых с порядком величин 
Далее будет рассмотрен пример реализации предлагаемого способа управления. Пусть необходимо выдать заданное значение скорости коррекции ΔVZK с приведением  в область отрицательных значений его составляющей Gy(tK) с начальными условиями
в область отрицательных значений его составляющей Gy(tK) с начальными условиями  Для этого производится последовательная работа двумя двигателями РД 1,3 и РД 2,4 равной продолжительности, при этом управляющие моменты и кинетический момент по оси ОY также последовательно взаимно компенсируют (см. таблицу) и приведения к заданным значениям Gy(tK) не производится.
Для этого производится последовательная работа двумя двигателями РД 1,3 и РД 2,4 равной продолжительности, при этом управляющие моменты и кинетический момент по оси ОY также последовательно взаимно компенсируют (см. таблицу) и приведения к заданным значениям Gy(tK) не производится.
Для решения поставленной задачи производится переработка значения ΔVZK на величину ΔV'ZK, с последующим включением двух двигателей РД 5,7 для компенсации значения ΔV'ZK. Некомпенсированный момент Му=2М, прикладываемый к корпусу КА от РД, при стабилизации углового движения системой СГ будет приводить текущее значение к заданным значениям Gy(tK) по оси (-ОY). Продолжительность указанного приведения Δtr будет определяться по выражению
Δtr=mКА·ΔV'ZK/2Р, где mКА - масса КА,
и соответственно 
Рассмотренной группе присваивается первый номер, Σ(i):=1[РД1,3(Δt1); РД2,4(Δt2=Δt1); РД5,7(Δtr)], причем в скобках указываются номера двигателей, последовательность их включений и продолжительность работы.
Из рассмотренного примера наглядно видно, что дополнительные затраты рабочего тела получены при включении РД 5,7 и РД 1,3, а также РД 2,4 при отработке ΔV'ZK.
Если проанализировать состояние сил тяг и моментов, приведенных в таблице, то можно сделать вывод, что различными комбинациями включений РД 1…8 можно получить как необходимые значения скорости коррекции в направлении осей ±OY и ±OZ, так и приведение значения вектора  в любую точку области S. При этом указанные приведения возможны также парами РД, например, пара РД 1,5 создает Мх=-2М и т.д.
в любую точку области S. При этом указанные приведения возможны также парами РД, например, пара РД 1,5 создает Мх=-2М и т.д.
Далее исключается работа ДО в рассмотренной группе, направленная на приведение  к заданному значению. По аналогии, присваивается ей номер
к заданному значению. По аналогии, присваивается ей номер  Продолжительность работы группы равна
Продолжительность работы группы равна  и обеспечивает получение только значения заданной скорости коррекции ΔVZK. За начальное условие принимается
и обеспечивает получение только значения заданной скорости коррекции ΔVZK. За начальное условие принимается 
Так как идеальной взаимной компенсации управляющих моментов от РД как правило достичь невозможно, а также с учетом действия на корпус КА составляющих главного вектора возмущающего момента, прогнозируемое движение годографа вектора  при работе 1'-й группы РД имеет вид, представленный на чертеже. На момент окончания коррекции орбиты tK=t0+Δτ вектор суммарного кинетического момента будет иметь значение
при работе 1'-й группы РД имеет вид, представленный на чертеже. На момент окончания коррекции орбиты tK=t0+Δτ вектор суммарного кинетического момента будет иметь значение 
Для коррекции орбиты можно предложить и другие сочетания групп, например, одновременную работу РД 1,4.
В таком случае некомпенсированное значение момента Mz будет производить дополнительную нагрузку системы СГ кинетическим моментом. Поэтому стратегию коррекции орбиты КА придется изменить, проводя, например, запланированный импульс в несколько этапов и т.д.
Таким образом, прогнозируется значение суммарного вектора кинетического момента  для каждой из групп i-x двигателей, при условии
для каждой из групп i-x двигателей, при условии 
Далее определяется множество векторов  задающих j-e точки прицеливания для приведения векторов
задающих j-e точки прицеливания для приведения векторов  в область кинетического момента SK, где элементы множества j=1, 2, 3, … определяются числом векторов. Например, координаты центра области SK в связанном базисе, имеющей форму сферы, имеют значения (0; -0,5 Г; 0,5 Г), радиус сферы Rсф=0,2Г. Тогда все векторные окончания, принадлежащие SK, включая ее поверхность, определяют указанное множество. Например,
в область кинетического момента SK, где элементы множества j=1, 2, 3, … определяются числом векторов. Например, координаты центра области SK в связанном базисе, имеющей форму сферы, имеют значения (0; -0,5 Г; 0,5 Г), радиус сферы Rсф=0,2Г. Тогда все векторные окончания, принадлежащие SK, включая ее поверхность, определяют указанное множество. Например, 
 и т.д.
и т.д.
Векторы рассогласования определяются для приведения суммарного кинетического момента при коррекции орбиты каждой Σ'(i)-й группой ДО в область SK.

Если  то
то 
 и т.д.
и т.д.
Аналогично для других значений 
 … и т.д.
… и т.д.
Затем прогнозируется изменение вектора кинетического момента  при условии воздействия на корпус КА магнитных моментов
при условии воздействия на корпус КА магнитных моментов  получаемых от взаимодействия магнитных моментов управляемых токовых контуров КА с МПЗ, направленных противоположно векторам рассогласования
получаемых от взаимодействия магнитных моментов управляемых токовых контуров КА с МПЗ, направленных противоположно векторам рассогласования  При этом обеспечивается наиболее эффективное воздействие
При этом обеспечивается наиболее эффективное воздействие  за счет получения максимально тупого угла (вплоть до развернутого) между указанными векторами.
за счет получения максимально тупого угла (вплоть до развернутого) между указанными векторами.
Вектор магнитного момента  определяется по выражению (см. [4])
определяется по выражению (см. [4])

где  - вектор магнитного момента КА;
- вектор магнитного момента КА;  - вектор индукции МПЗ. В свою очередь, вектор
- вектор индукции МПЗ. В свою очередь, вектор  можно представить как
можно представить как  где
где  - векторы собственных магнитных моментов управляемых токовых контуров КА,
- векторы собственных магнитных моментов управляемых токовых контуров КА,

где Sp - площадь контура; Iр - ток протекания;  - внешняя нормаль контура, взаимосвязана с обходом токового контура таким образом, что из конца вектора
- внешняя нормаль контура, взаимосвязана с обходом токового контура таким образом, что из конца вектора  обход должен быть виден происходящим против часовой стрелки.
обход должен быть виден происходящим против часовой стрелки.
В качестве собственных управляемых токовых контуров можно рассматривать: токовые контуры солнечных элементов, расположенные на солнечных батареях (СБ) [5], токовые контуры электрических шин с изменяемыми характеристиками [6], токовые контуры намагничивающей катушки электромагнитов (ЭМИО) [4] и др. Управление указанными токовыми контурами может вестись как через изменение направлений протекания тока в контурах, так и за счет их разворота относительно корпуса КА. Наиболее типичным примером указанного управления являются токовые контуры, расположенные на поверхности поворотных СБ [5].
Вектор  и его проекции на оси связанного базиса при поддержании заданной ориентации в текущий момент времени принимаются как постоянные значения. Тогда управление
и его проекции на оси связанного базиса при поддержании заданной ориентации в текущий момент времени принимаются как постоянные значения. Тогда управление  производится за счет разворота вектора
производится за счет разворота вектора 
Условие разгрузки записано в виде

где  и
и  - единичные векторы для
- единичные векторы для  и
и  соответственно, при этом,
соответственно, при этом,  где
где  и
и  - единичные векторы для
- единичные векторы для  и
и  соответственно.
соответственно.
Таким образом, условие разгрузки будет иметь вид

Необходимо для примера произвести оценку величины момента  при его использовании для управления угловым движением геостационарного спутника связи (ГСС), текущее расстояние которого от центра Земли до центра масс r≈42000 км.
при его использовании для управления угловым движением геостационарного спутника связи (ГСС), текущее расстояние которого от центра Земли до центра масс r≈42000 км.
В качестве орбитальной системы координат принимается правая система Ox0y0z0 с началом в центре масс КА. Ось Oz0 направлена по вертикали от центра Земли, 0х0 - перпендикулярно Oz0 в сторону орбитального движения (см.[4], стр.42). Принимается условие, что геомагнитная ось совпадает с географической осью Земли. Тогда, в осях указанного базиса вектор  напряженности МПЗ для ГСС имеет вид
напряженности МПЗ для ГСС имеет вид

где М3 - магнитный момент Земли; М3=8,1·1022 (А·м2).
 где
где  - магнитная постоянная.
- магнитная постоянная.
Тогда 
При токе генерируемого СБ в 150 А и площади СБ 40 м2, величина собственного магнитного момента
LСБ≈6000 A·м2
Для указанных значений

Если сравнивать управляющие моменты от электрических ракетных двигателей (ЭРД), входящих в блок РД (см. [3]), то  сопоставимы с
сопоставимы с 
 |M2|≈|M3|≈2·10-3 (H·м).
|M2|≈|M3|≈2·10-3 (H·м).
Таким образом, только магнитным управляющим моментом, получаемым от СБ, можно парировать действия  приводящие к накоплению
приводящие к накоплению  в системе СГ.
в системе СГ.
В рассмотренном примере, направление вектора  перпендикулярно плоскости орбиты ГСС. В том же направлении расположены и оси вращения СБ. Перпендикулярно оси вращения, по направлению нормали
перпендикулярно плоскости орбиты ГСС. В том же направлении расположены и оси вращения СБ. Перпендикулярно оси вращения, по направлению нормали  к рабочей поверхности СБ направлены
к рабочей поверхности СБ направлены  СБ. Следовательно
СБ. Следовательно  от СБ будет поворачиваться в орбитальной плоскости вместе с поворотом
от СБ будет поворачиваться в орбитальной плоскости вместе с поворотом  Причем в зависимости от выбранных направлений
Причем в зависимости от выбранных направлений  производится разворот
производится разворот  на угол π относительно текущего положения батарей. Существует также возможность поворачивать СБ на некоторые углы относительно их ориентации на Солнце, тем самым добиваясь поворотов векторов
на угол π относительно текущего положения батарей. Существует также возможность поворачивать СБ на некоторые углы относительно их ориентации на Солнце, тем самым добиваясь поворотов векторов 
Для управления кинетическим моментом относительно оси, направленной по нормали к плоскости орбиты, можно использовать изменяемые токовые контуры электрических шин КА, ЭМИО и др. устройства, обладающие собственным магнитным моментом.
После выполнения условия (8), на интервале коррекции орбиты каждой Σ'(i)j-й группой ДО прогнозируются изменения суммарного вектора кинетического момента  при условии воздействия на КА управляющих моментов
при условии воздействия на КА управляющих моментов  направленных противоположно векторам рассогласования
направленных противоположно векторам рассогласования  и имеющих наибольшие проекции на указанные направления. Указанный момент формируется за счет направленного совокупного использования собственных токовых контуров КА.
и имеющих наибольшие проекции на указанные направления. Указанный момент формируется за счет направленного совокупного использования собственных токовых контуров КА.
В случаях приведения векторов  в заданную область SK, определяемых по выполнению условия
в заданную область SK, определяемых по выполнению условия  для каждого из j-x векторов прицеливания в рабочих группах Σ′(i)j, реализующих коррекцию орбиты, определяется расход рабочего тела
для каждого из j-x векторов прицеливания в рабочих группах Σ′(i)j, реализующих коррекцию орбиты, определяется расход рабочего тела  Далее, по наименьшему из значений
Далее, по наименьшему из значений  выбирается группа
выбирается группа  для коррекции орбиты. Выбранной группе в процессе прогноза изменения значений вектора
для коррекции орбиты. Выбранной группе в процессе прогноза изменения значений вектора  соответствуют значения векторов магнитного момента
соответствуют значения векторов магнитного момента  и рассогласования суммарного кинетического момента
и рассогласования суммарного кинетического момента  определяемого для
определяемого для  -й группы ДО по выражению
-й группы ДО по выражению

где  - вектор суммарного кинетического момента на время завершения коррекции орбиты tK
- вектор суммарного кинетического момента на время завершения коррекции орбиты tK  -й группой ДО при условии воздействия на КА
-й группой ДО при условии воздействия на КА 
Далее, токовые контуры должны быть повернуты до получения указанного магнитного момента и оставаться включенными при выбранном направлении вплоть до завершения коррекции орбиты.
А в случае, если  определяются дополнительные вектора рассогласования
определяются дополнительные вектора рассогласования

где  - вектор суммарного кинетического момента на время завершения коррекции орбиты Σ'(i)-й группой ДО при условии воздействия на КА
- вектор суммарного кинетического момента на время завершения коррекции орбиты Σ'(i)-й группой ДО при условии воздействия на КА  направленных противоположно вектора рассогласования
направленных противоположно вектора рассогласования 
Далее, необходимо при помощи ДО (пар или последовательно включаемых) провести дополнительную разгрузку (с учетом основной разгрузки при помощи  от накопленного вектора кинетического момента
от накопленного вектора кинетического момента  c приведением его в область SK.
c приведением его в область SK.
Для этого определяются группы Σ”(i)-x ДО, выполняющие одновременно с коррекцией орбиты разгрузку системы СГ от кинетического момента  Выбор группы Σ”(i)-x ДО, выполняющих коррекцию орбиты, осуществляется по критерию минимального расхода рабочего тела
Выбор группы Σ”(i)-x ДО, выполняющих коррекцию орбиты, осуществляется по критерию минимального расхода рабочего тела  предварительно определив для каждой из них его значение
предварительно определив для каждой из них его значение 
В процессе коррекции орбиты система СГ разгружается от накопленного кинетического момента  за счет противоположно направленного ему управляющего момента
за счет противоположно направленного ему управляющего момента  При этом
При этом

На интервале, принадлежащем (t0, tK), при помощи ДО, входящих в выбранную группу, осуществляется разгрузка системы СГ от накопленного кинетического момента на величину

где  - вектор суммарного кинетического момента на момент времени завершения коррекции орбиты tK
- вектор суммарного кинетического момента на момент времени завершения коррекции орбиты tK  -й группой ДО при условии воздействия на КА
-й группой ДО при условии воздействия на КА 
Момент времени начала разгрузки tp выбирается из условия ее завершения к моменту времени tK.
Для реализации предлагаемого способа управления кинетическим моментом КА в процессе коррекции орбиты могут быть использованы частично блоки, реализующие способ-прототип [2].
В дополнение к указанным блокам необходимо ввести блок формирования магнитного управляющего момента (БФМУМ), блок определения условий формирования магнитного управляющего момента (БФУФМУМ) и блок управления токовых контуров (БУТК).
Блоки системы-прототипа позволяют провести заданную коррекцию на ДО при поддержании ориентации с помощью СГ. При этом одновременно производится приведение вектора  в заданную область SK c использованием ДО.
в заданную область SK c использованием ДО.
БФУФМУМ по информации, получаемой от блоков системы-прототипа, по зависимостям (4), (10)-(13) определяют вектор рассогласования для приведения суммарного кинетического момента при коррекции орбиты в область SK с учетом направленного действия  группы ДО в соответствующей динамической операции. Значение вектора рассогласования с одного из выходов указанного блока поступают в БФМУМ, где определяются собственные токовые контуры и формируется логика управления ими для получения требуемого значения вектора
группы ДО в соответствующей динамической операции. Значение вектора рассогласования с одного из выходов указанного блока поступают в БФМУМ, где определяются собственные токовые контуры и формируется логика управления ими для получения требуемого значения вектора  По сформированной логике БФМУМ ведет управление токовыми контурами БУТК. При этом БУТК представляет собой набор управляемых токовых контуров с конструктивной реализацией разного вида (см.[4]-[6]).
По сформированной логике БФМУМ ведет управление токовыми контурами БУТК. При этом БУТК представляет собой набор управляемых токовых контуров с конструктивной реализацией разного вида (см.[4]-[6]).
С другого выхода БФУФМУМ, в случае необходимости разгрузки на ДО выдается управляющая информация в блок выбора разгрузочного момента для системы СГ (системы, реализующей способ-прототип, см. [2]), определяющая значения векторов  По указанной информации осуществляется выбор номеров двигателей, разгружающих систему от указанных «дополнительных векторов рассогласования».
По указанной информации осуществляется выбор номеров двигателей, разгружающих систему от указанных «дополнительных векторов рассогласования».
Анализ программы полета ГСС «Ямал», на котором установлен блок ЭРД с векторами тяг, расположенными под углами к осям связанного базиса (см. таблицу), показал, что применение предлагаемого способа разгрузки с использованием магнитного управляющего момента от СБ сокращает расход рабочего тела на выполнение программы полета на 4-6%. Также необходимо отметить, что специальных дополнительных затрат электроэнергии на разгрузку не требуется, при этом токовые контуры перед началом коррекции перекоммутируются необходимым образом (см. [5]) при сохранении номинально генерируемой батареями электрической мощности.
Список литературы
1. Способ управления космическим аппаратом с помощью реактивных исполнительных органов и система для его реализации. Патент РФ 2112716. Приоритет 13.05.1997.
2. Способ управления кинетическим моментом космического аппарата в процессе коррекции орбиты и система для его реализации. Патент РФ 2178761 - прототип. Приоритет 28.02.2001.
3. Способ управления космическим аппаратом, снабженным реактивными двигателями с направленными под углом к осям связанного базиса и смещенными относительно центра масс аппарата линиями действия тяг, система для реализации способа, блок реактивных двигателей системы. Патент РФ 2124461. Приоритет 12.11.1997.
4. А.П.Коваленко. Магнитные системы управления космическими летательными аппаратами. М., Машиностроение, 1975, приоритет 20.04.92.
5. Способ формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями. Патент РФ 2030338.
6. Способ управления пространственным положением космического корабля. Патент США 6089509. Приоритет 01.04.1997.
Изобретение относится к управлению ориентацией и движением центра масс космического аппарата (КА). Способ включает определение требуемой скорости коррекции орбиты КА и поддержание заданной ориентации КА с помощью силовых гироскопов. В процессе коррекции определяют текущий вектор  кинетического момента КА и прогнозируют его изменение. Выбирают группы двигателей ориентации для проведения коррекции орбиты и разгрузки гироскопов до момента попадания вектора
кинетического момента КА и прогнозируют его изменение. Выбирают группы двигателей ориентации для проведения коррекции орбиты и разгрузки гироскопов до момента попадания вектора  в заданную область его значений SK⊂S, где S - область располагаемых значений . При этом для каждой из групп Σ'(i) i-x двигателей, дающей требуемую скорость коррекции - помимо двигателей для разгрузки гироскопов, - прогнозируют значения суммарного вектора в конце коррекции, принадлежащие области S. По этим значениям и точкам прицеливания в область SK определяют рассогласования вектора и возможность их устранения управляющими магнитными моментами токовых контуров КА. Если данные рассогласования устранимы, то задействуют необходимые контуры, а среди групп Σ'(i) выбирают ту, которая дает минимальный расход рабочего тела. В противном случае определенные части рассогласований устраняют с помощью магнитной системы ориентации КА, а другие их части - при помощи двигателей ориентации, выполняющих одновременно с коррекцией орбиты КА разгрузку силовых гироскопов. Техническим результатом изобретения является сокращение затрат рабочего тела двигателей ориентации. 1 ил., 1 табл.
в заданную область его значений SK⊂S, где S - область располагаемых значений . При этом для каждой из групп Σ'(i) i-x двигателей, дающей требуемую скорость коррекции - помимо двигателей для разгрузки гироскопов, - прогнозируют значения суммарного вектора в конце коррекции, принадлежащие области S. По этим значениям и точкам прицеливания в область SK определяют рассогласования вектора и возможность их устранения управляющими магнитными моментами токовых контуров КА. Если данные рассогласования устранимы, то задействуют необходимые контуры, а среди групп Σ'(i) выбирают ту, которая дает минимальный расход рабочего тела. В противном случае определенные части рассогласований устраняют с помощью магнитной системы ориентации КА, а другие их части - при помощи двигателей ориентации, выполняющих одновременно с коррекцией орбиты КА разгрузку силовых гироскопов. Техническим результатом изобретения является сокращение затрат рабочего тела двигателей ориентации. 1 ил., 1 табл.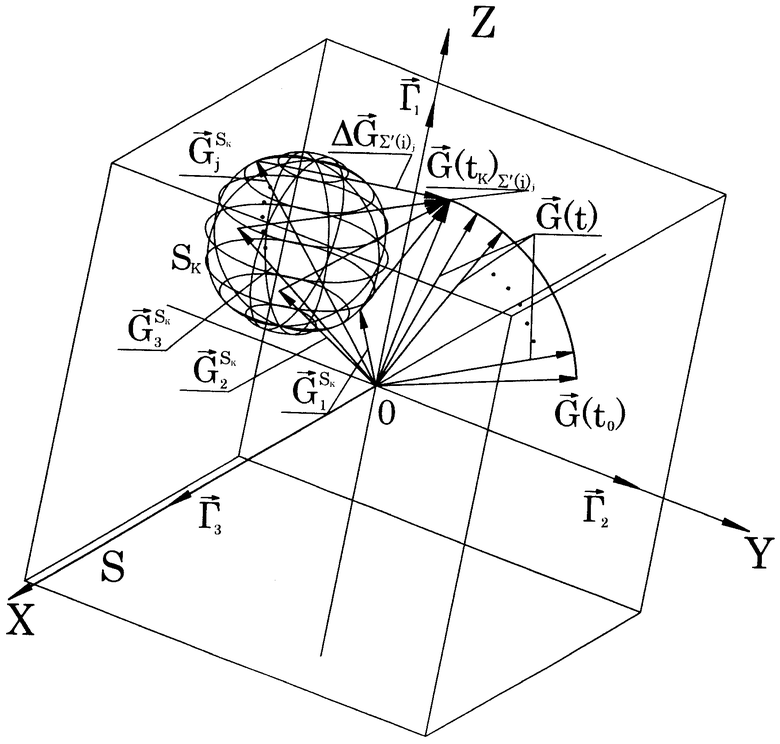
Способ управления кинетическим моментом космического аппарата в процессе коррекции орбиты, включающий определение требуемого значения скорости коррекции, поддержание заданной ориентации космического аппарата с помощью силовых гироскопов в процессе коррекции орбиты i-ми двигателями ориентации, где i=1, 2, …, n - номера двигателей, определение текущих значений суммарного вектора кинетического момента космического аппарата  по измеренным значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, а также по известным значениям его тензора инерции, прогноз изменений вектора
по измеренным значениям вектора кинетического момента в системе силовых гироскопов и вектора угловой скорости космического аппарата, а также по известным значениям его тензора инерции, прогноз изменений вектора  с учетом его значений
с учетом его значений  на момент начала коррекции t0, в процессе коррекции орбиты i-ми двигателями ориентации, объединенными в группы Σ(i), с учетом последовательности их включений и продолжительности работы, причем выбором Σ(i)-x групп двигателей обеспечивают проведение коррекции орбиты и разгрузку системы силовых гироскопов до момента tK завершения коррекции и достижения вектором значений
на момент начала коррекции t0, в процессе коррекции орбиты i-ми двигателями ориентации, объединенными в группы Σ(i), с учетом последовательности их включений и продолжительности работы, причем выбором Σ(i)-x групп двигателей обеспечивают проведение коррекции орбиты и разгрузку системы силовых гироскопов до момента tK завершения коррекции и достижения вектором значений  SK, где SK - заданная область приведения кинетического момента, причем SK⊂S, где S - область располагаемых значений вектора кинетического момента в системе силовых гироскопов, отличающийся тем, что для каждой из групп Σ'(i) i-x двигателей ориентации, обеспечивающих получение требуемого значения скорости коррекции орбиты, помимо двигателей для разгрузки системы силовых гироскопов от накопленного кинетического момента, прогнозируют значения суммарного вектора кинетического момента
SK, где SK - заданная область приведения кинетического момента, причем SK⊂S, где S - область располагаемых значений вектора кинетического момента в системе силовых гироскопов, отличающийся тем, что для каждой из групп Σ'(i) i-x двигателей ориентации, обеспечивающих получение требуемого значения скорости коррекции орбиты, помимо двигателей для разгрузки системы силовых гироскопов от накопленного кинетического момента, прогнозируют значения суммарного вектора кинетического момента  S, на момент tK завершения коррекции орбиты указанными двигателями ориентации, определяют значения векторов
S, на момент tK завершения коррекции орбиты указанными двигателями ориентации, определяют значения векторов  , задающих j-e точки прицеливания для приведения векторов
, задающих j-e точки прицеливания для приведения векторов  в указанную область SK, где j=1, 2, 3… - число векторов, определяют при коррекции орбиты каждой Σ'(i)-й группой двигателей векторы рассогласования для приведения суммарного кинетического момента в область SK:
в указанную область SK, где j=1, 2, 3… - число векторов, определяют при коррекции орбиты каждой Σ'(i)-й группой двигателей векторы рассогласования для приведения суммарного кинетического момента в область SK:

прогнозируют на интервале коррекции орбиты каждой группой двигателей изменения суммарного вектора кинетического момента , при условии воздействия на космический аппарат управляющих моментов, получаемых от взаимодействия магнитных моментов управляемых токовых контуров космического аппарата с магнитным полем Земли  , направленных противоположно указанным векторам рассогласования
, направленных противоположно указанным векторам рассогласования  и в случае приведения векторов
и в случае приведения векторов  в указанную область SК при выполнении условия
в указанную область SК при выполнении условия  определяют расход рабочего тела
определяют расход рабочего тела  для каждой из Σ'(i)j-х групп двигателей, обеспечивающих выполнение указанных условий по j-м векторам, задающим точки прицеливания, и по наименьшему из значений
для каждой из Σ'(i)j-х групп двигателей, обеспечивающих выполнение указанных условий по j-м векторам, задающим точки прицеливания, и по наименьшему из значений  выбирают
выбирают  группу двигателей ориентации для коррекции орбиты, далее перед началом проведения коррекции орбиты разворачивают собственные токовые контуры космического аппарата до получения при их включении магнитного момента
группу двигателей ориентации для коррекции орбиты, далее перед началом проведения коррекции орбиты разворачивают собственные токовые контуры космического аппарата до получения при их включении магнитного момента  направленного противоположно вектору рассогласования суммарного кинетического момента
направленного противоположно вектору рассогласования суммарного кинетического момента  определенного для
определенного для  группы двигателей ориентации:
группы двигателей ориентации:

где  - вектор в момент tK завершения коррекции орбиты
- вектор в момент tK завершения коррекции орбиты  -й группой двигателей при условии воздействия на космический аппарат магнитного момента
-й группой двигателей при условии воздействия на космический аппарат магнитного момента  а в случае если
а в случае если  определяют дополнительные векторы рассогласования
определяют дополнительные векторы рассогласования

где  - вектор в момент tK завершения коррекции орбиты Σ'(i)-й группой двигателей при условии воздействия на космический аппарат магнитных моментов
- вектор в момент tK завершения коррекции орбиты Σ'(i)-й группой двигателей при условии воздействия на космический аппарат магнитных моментов  направленных противоположно векторам рассогласования
направленных противоположно векторам рассогласования  определяют группы Σ”(i) i-x двигателей ориентации, выполняющих одновременно с коррекцией орбиты разгрузку системы силовых гироскопов от кинетического момента
определяют группы Σ”(i) i-x двигателей ориентации, выполняющих одновременно с коррекцией орбиты разгрузку системы силовых гироскопов от кинетического момента  определяют для каждой из Σ"(i)-x групп двигателей расход рабочего тела
определяют для каждой из Σ"(i)-x групп двигателей расход рабочего тела
и для наименьшего из значений  выбирают
выбирают  -ю группу двигателей для коррекции орбиты, далее в процессе коррекции орбиты производят разгрузку системы силовых гироскопов вышеуказанным образом с использованием магнитного управляющего момента
-ю группу двигателей для коррекции орбиты, далее в процессе коррекции орбиты производят разгрузку системы силовых гироскопов вышеуказанным образом с использованием магнитного управляющего момента  направленного противоположно вектору рассогласования
направленного противоположно вектору рассогласования  определенному для
определенному для  -й группы двигателей, на величину этого рассогласования
-й группы двигателей, на величину этого рассогласования

и при помощи двигателей ориентации, входящих в указанную группу, на величину

где  - вектор в момент tK завершения коррекции орбиты -й группой двигателей ориентации при условии воздействия на космический аппарат магнитного управляющего момента
- вектор в момент tK завершения коррекции орбиты -й группой двигателей ориентации при условии воздействия на космический аппарат магнитного управляющего момента 
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178761C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2112716C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| US 6681159 А, 20.01.2004. | |||

