Назначение
Предлагаемое изобретение относится к технике управления ориентацией космических аппаратов (КА), в частности малых КА, для разгрузки кинетического момента инерционных исполнительных органов (маховиков различного типа, силовых гироскопов и т.п.) системы ориентации и первоначального успокоения КА после отделения от ракеты, путем взаимодействия с геомагнитным полем Земли.
Уровень техники
В настоящее время наблюдается рост создания малых космических аппаратов (массой 50-100 кг). Они относительно недороги, легко модифицируются для решения тех или иных задач, могут выводиться в космос носителями легкого класса или одновременно, вплоть до десятков, более тяжелыми ракетами. Применение малых космических аппаратов в финансовом отношении является более выгодным в случае аварии при запуске или отказе при работе на орбите. С учетом низкой цены таких аппаратов из них могут быть сформированы многоспутниковые системы для связи, непрерывного мониторинга земной поверхности, научных исследований и т.д.
Требования к современным малым КА включают в себя, как правило, трехосную ориентацию в заданной системе координат, обеспечивающую целевое применение в таких сферах, как дистанционное зондирование Земли, астрофизические и геофизические исследования.
Наиболее широко известны системы с газореактивными соплами или иными микрореактивными двигателями. Однако они имеют существенный недостаток - расход рабочего тела, вследствие чего полезное время функционирования КА ограничено и, кроме того, для малых КА данные системы практически неприемлемы из-за наличия рабочего тела, увеличивающего массу и габариты КА.
Поэтому для малых КА наиболее приемлемыми устройствами управления являются, например, двигатели-маховики, часто используемые в системах ориентации и стабилизации КА (см. патент РФ №1839928), которые отличают высокая точность стабилизации, малые размеры, простота управления, а также отсутствие расхода невозобновляемого рабочего тела. Двигатели-маховики создают внутренний управляющий момент (создают механический момент вокруг оси, параллельной оси вращения ротора двигателя-маховика) и не могут парировать внешних возмущений. Они являются инерционными носителями кинетического момента (далее по тексту - инерционные исполнительные органы). Поэтому одним из недостатков двигателей данного типа является необходимость сброса кинетического момента маховиков при достижении ими предельных скоростей вращений. В том случае, если на корпус спутника воздействует какой-нибудь внешний момент (силы аэродинамического сопротивления, световое давление, гравитационное поле или другие внешние силы), то корпус с течением определенного времени приобретает некоторую угловую скорость вокруг какой-либо оси. Эту «паразитную» скорость можно ликвидировать только внешним моментом (А.Г. Иосифьян, Электромеханика в космосе. «Космонавтика, астрономия» №3, 1977 г.). Физически это означает, что «паразитное» вращение приостанавливается, если перевести полученный корпусом кинетический момент «внутрь», запуская, например, ротор двигателя-маховика в направлении, по которому действовала внешняя сила и внешний вращающий момент.
Для сброса кинетического момента используется магнитная система, включающая в себя магнитные исполнительные органы (в космической технике используются электромагниты, постоянные магниты, катушки индуктивности с током, сверхпроводящие магниты), формирующие магнитные моменты, которые, взаимодействуя с геомагнитным полем, создают управляющие механические моменты. Данные управляющие механические моменты и обеспечивают сброс кинетических моментов с двигателей-маховиков.
Таким образом, при создании малых КА весьма актуальна разработка высокоэффективной системы сброса кинетических моментов инерционных исполнительных органов, обеспечивающих ориентацию и стабилизацию малых космических аппаратов с заданной точностью, имеющих малые массу и габариты, без расхода рабочего тела и с минимальными энергетическими затратами.
В общем случае управляющий момент М определяется основным уравнением управления (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 21):
М=L×В,
где L - вектор создаваемого магнитного момента магнитной системой;
В - вектор магнитной индукции магнитного поля Земли.
Например, для решения задачи разгрузки кинетического момента инерционных исполнительных органов известны способ магнитной разгрузки инерционных исполнительных органов космического аппарата и устройство для его осуществления (патент РФ №2070148). Согласно техническому решению этого аналога способ магнитной разгрузки инерционных исполнительных органов КА заключается в создании магнитного момента магнитной системой, повороте указанной системы вокруг одной из осей КА, определении векторов накопленного исполнительными органами кинетического момента и магнитной индукции магнитного поля Земли, и последующем осуществлении поворота магнитной системы вокруг второй оси, перпендикулярной указанной оси и вектору магнитного момента.
Устройство для магнитной разгрузки инерционных исполнительных органов КА по этому способу содержит магнитную систему, соединенный с КА подвес магнитной системы, включающий привод вращения, осуществляющий поворот указанной системы вокруг одной из осей КА, и систему управления КА. Также оно снабжено средством для определения вектора магнитной индукции магнитного поля Земли, датчиками накопленного исполнительными органами кинетического момента, входы которых соединены с указанной системой управления, блоком определения магнитного момента, входы которого соединены с указанными датчиками, со средством для определения вектора магнитной индукции, а также с указанной системой управления. Подвес снабжен вторым приводом вращения, осуществляющим поворот магнитной системы вокруг оси, перпендикулярной указанной оси и вектору создаваемого системой магнитного момента, при этом устройство дополнительно содержит блок определения углов поворота магнитной системы вокруг указанных осей, входы и выходы которого связаны через преобразующие элементы с указанными приводами вращения магнитной системы, причем указанные входы также соединены с блоком определения магнитного момента. В качестве магнитной системы использованы сверхпроводящая короткозамкнутая катушка индуктивности с циркулирующим по ней постоянным током и система криогенного обеспечения.
Недостатком данного способа и устройства для осуществления магнитной разгрузки инерционных исполнительных органов КА является большая масса и габариты из-за наличия подвеса, приводов, блока определения углов поворота, системы криогенного обеспечения, большое энергопотребление. Поэтому использование его для малых КА массой до ста килограмм не является оптимальным решением.
Наиболее близким к предлагаемому изобретению является устройство магнитной системы сброса кинетического момента (А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 103-105), взятое за прототип.
1. Способ сброса кинетического момента инерционных исполнительных органов КА, заключающийся в определении векторов накопленного инерционными исполнительными органами кинетического момента и магнитной индукции магнитного поля Земли по трем координатным осям X, Y, Z, генерировании управляющих сигналов для магнитного исполнительного органа, на выходах которого формируются магнитные моменты по трем координатным осям X, Y, Z, определяемые напряжением источника питания.
2. Устройство содержит датчики компонент кинетического момента по трем координатным осям X, Y, Z, датчики компонент геомагнитной индукции по трем координатным осям X, Y, Z, блок управления, ко входам которого подключены упомянутые датчики, а к выходам три группы из последовательно соединенных релейного элемента и магнитного исполнительного органа.
На выходах датчиков компонент кинетического момента по трем координатным осям X, Y, Z формируются сигналы накопленных инерционными исполнительными органами кинетических моментов Кx, Кy, Kz, а на выходах датчиков геомагнитной индукции по трем координатным осям X, Y, Z формируются соответственно магнитные индукции Вx, Вy, Bz, и по полученным данным на выходе блока управления по трем координатным осям X, Y, Z формируются сигналы σх, σy, σz,
где
σx=КyBz-KzBy;
σy=KzВx-КxBz;
σz=КхBy-КyВx.
Данные сигналы σx, σy, σz поступают в релейные элементы, в котором происходит их сравнение с пороговым сигналом σ0.
При σi (i=x, y, z)>σ0 соответствующий релейный элемент включает магнитный исполнительный орган, на выходе которого создаются управляющие магнитные моменты относительно координатных осей КА: Lx, Ly, Lz.
В качестве электромагнитов в магнитных исполнительных органах можно использовать, например, электромагниты стержневого типа, т.е. на стержневом сердечнике намотаны катушки индуктивности.
Сформированный магнитный момент, взаимодействуя с магнитным полем Земли, создает управляющий механический момент М, с координатными составляющими:
Мx=LyBz-LzBy;
My=LzBx-LxBz;
Mz,=LxBy-LyBx.
В устройстве-прототипе обеспечиваются высокая надежность, т.к. положение вектора управляющего момента, ортогональное оси электромагнита, обеспечивает некоторую избыточность системы, заключающуюся в способности системы при некотором снижении производительности сбрасывать кинетический момент любого направления при отказе электромагнита одной координатной оси и при отказе тракта магнитометра другой координатной оси. Это объясняется тем, что каждый электромагнит, расположенный параллельно координатной оси, при наличии трех координатных составляющих геомагнитной индукции может создавать управляющие моменты, направленные по двум остальным координатным осям.
В условиях разгрузки σi (i=x, y, z)<σ0 потребление электроэнергии осуществляется в основном логической схемой. Однако при σi(i=x, y, z)>σ0, когда соответствующий релейный элемент включает магнитный исполнительный орган, независимо от величины составляющих Кx, Кy, Kz (σx, σy, σz) в каждой катушке X, Y, Z протекает ток, определяемый постоянным напряжением источника питания. Это влечет за собой избыточное энергопотребление.
Целью предлагаемого изобретения является снижение энергопотребления при осуществлении сброса кинетического момента инерционных исполнительных органов КА магнитными исполнительными органами.
Раскрытие изобретения
Сущность способа сброса кинетического момента инерционных исполнительных органов КА заключается в определении величин накопленных инерционными исполнительными органами кинетического момента и магнитной индукции магнитного поля Земли по трем координатным осям X, Y, Z и формировании на выходах магнитного исполнительного органа сигналов управляющих магнитных моментов в соответствии с величинами составляющих накопленного инерционными исполнительными органами кинетического момента, соответственно по каждой координатной оси X, Y, Z.
Сущность предлагаемого устройства сброса кинетического момента инерционных исполнительных органов КА заключается в техническом обеспечении в каждой катушке X, Y, Z магнитного исполнительного органа силы тока в соответствии с величинами кинетического момента Кx, Кy, Kz, (σx, σy, σz), определяемых датчиками компонент кинетического момента соответственно по каждой координатной оси X, Y, Z.
Устройство сброса кинетических моментов инерционных исполнительных органов КА включает в себя датчики компонент кинетического момента по трем координатным осям X, Y, Z, датчики компонент геомагнитной индукции по трем координатным осям X, Y, Z, блок управления (БУ), к входам которого подключены упомянутые датчики, магнитные исполнительные органы, на выходах которых формируются магнитные моменты.
Введение в устройство сброса кинетического момента инерционных исполнительных органов КА трех цифро-аналоговых преобразователей (ЦАП), входы которых подключены к трем выходам БУ, трех компараторов, первые входы которых подключены к выходам ЦАП, а на вторые входы подается сигнал σ0, трех элементов И, первые входы которых соединены с выходами компараторов, а вторые входы соединены с четвертым выходом БУ, трех электронных ключей, входы которых подключены к выходам ЦАП, управляющие входы электронных ключей соединены с выходами элементов И, а выходы соединены с входами магнитных исполнительных органов, содержащие последовательно соединенные реверсивные коммутаторы и электромагниты, позволяет обеспечить требуемые по величине магнитные индукции на выходе магнитных исполнительных органов по каждой координатной оси X, Y, Z в соответствии с величинами накопленного инерционными исполнительными органами кинетического момента Кx, Кy, Kz.
ЦАПы позволяют обеспечить формирование силы тока (величины магнитной индукции, которая пропорциональна силе тока) в каждой катушке X, Y, Z электромагнита, пропорциональной величинам напряжения на выходах ЦАП, которые соответствуют величинам кинетического момента Кx, Кy, Kz, (σx, σy, σz), определяемых датчиками компонент кинетического момента соответственно по каждой координатной оси X, Y, Z. Подача напряжения с выходов ЦАП через открытые электронные ключи обеспечивается компаратором при σi (i=x, y, z)>σo, при выполнении условий, когда полезный механический момент Мпол превышает паразитный Мпар, т.е. в блоке управления формируется сигнал запрета  , который разрешает прохождение сигналов σi, соответствующей логической "1" через элементы И при сигнале запрета ao, соответствующей логической "1" (описание с наглядной иллюстрацией по формированию сигнала запрета аo будет приведено ниже). Это условие сравнения необходимо для того, что в случае, когда паразитный момент больше полезного, устройство может не только не сбрасывать кинетический момент, а напротив, увеличивать его (паразитные возмущения при включении магнитных исполнительных органов возникают в следствие того, что механический момент, создаваемый взаимодействием магнитного поля с геомагнитным полем, всегда перпендикулярен вектору геомагнитной индукции, поэтому в общем случае он не может быть параллельным вектору кинетического момента, направление которого произвольно, и, следовательно, вектор механического момента представляет собой сумму двух составляющих - полезной составляющей, вектор которой параллелен вектору кинетического момента и направлен в противоположную сторону, и паразитную составляющую, вектор которой перпендикулярен вектору кинетического момента).
, который разрешает прохождение сигналов σi, соответствующей логической "1" через элементы И при сигнале запрета ao, соответствующей логической "1" (описание с наглядной иллюстрацией по формированию сигнала запрета аo будет приведено ниже). Это условие сравнения необходимо для того, что в случае, когда паразитный момент больше полезного, устройство может не только не сбрасывать кинетический момент, а напротив, увеличивать его (паразитные возмущения при включении магнитных исполнительных органов возникают в следствие того, что механический момент, создаваемый взаимодействием магнитного поля с геомагнитным полем, всегда перпендикулярен вектору геомагнитной индукции, поэтому в общем случае он не может быть параллельным вектору кинетического момента, направление которого произвольно, и, следовательно, вектор механического момента представляет собой сумму двух составляющих - полезной составляющей, вектор которой параллелен вектору кинетического момента и направлен в противоположную сторону, и паразитную составляющую, вектор которой перпендикулярен вектору кинетического момента).
С учетом тенденции развития микроэлектроники и программного обеспечения наиболее оптимальным является цифровой способ выполнения блока управления. Этому способствуют и требования ГОСТ Р 52070-2003 по применению стандартизированных интерфейсов последовательных мультиплексных каналов обмена (МКО), включающих в себя бортовую вычислительную машину с системным и локальными контроллерами.
Таким образом, благодаря введению новых признаков - трех ЦАП, трех компараторов, трех элементов И и трех электронных ключей обеспечивается формирование магнитными исполнительными органами непостоянных (максимальных), как у прототипа, а оптимально требуемых по величине магнитных индукций по каждой координатной оси X, Y, Z. Тем самым осуществляется экономия расхода электроэнергии магнитными исполнительными органами, и как следствие, уменьшается выделение ими тепла. Кроме того, создается оптимальный управляющий механический момент, вызывающий отклонение КА от ориентированного положения при разгрузке кинетического момента. В целом это определяет экономичный режим потребления электроэнергии и оптимальный режим работы системы ориентации КА.
Графические иллюстрации
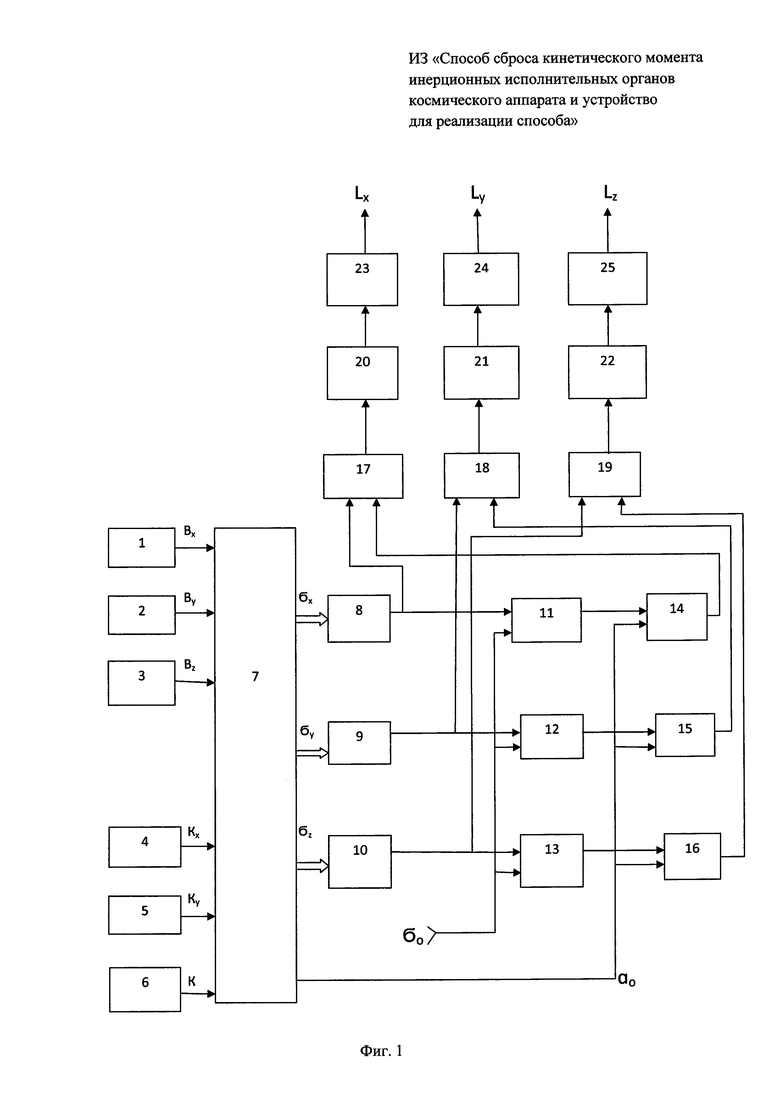
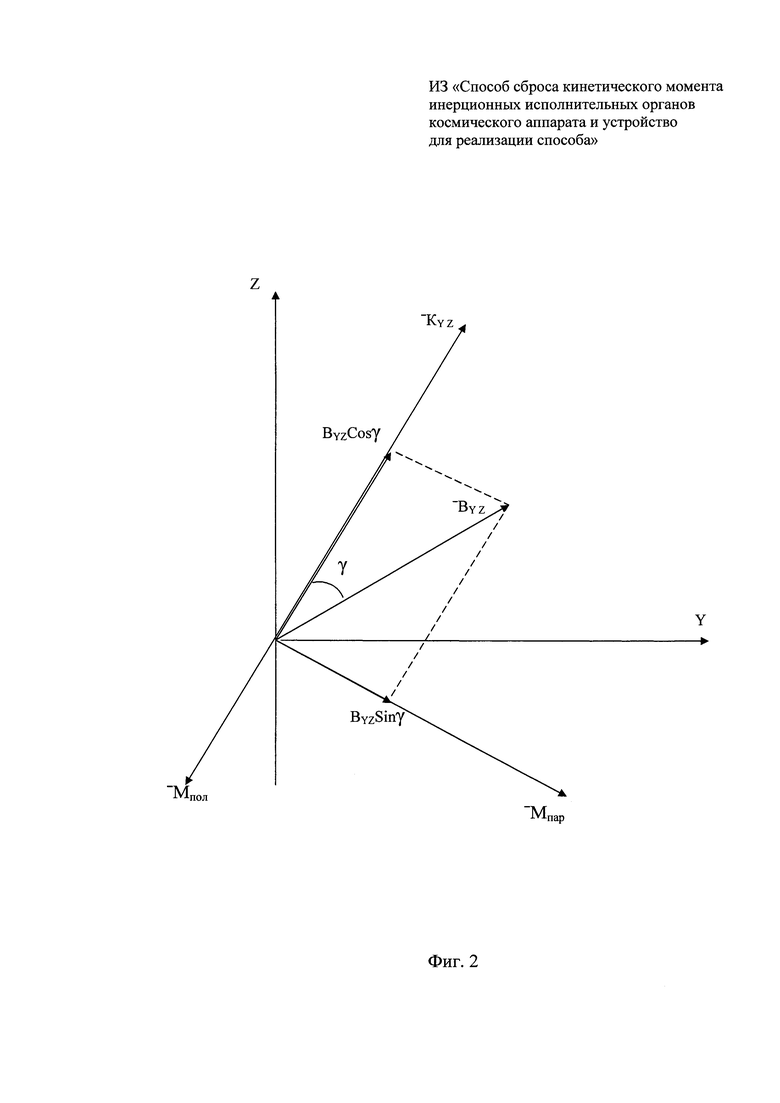
На приведенной фигуре 1 в качестве графической иллюстрации приведена структурная схема устройства сброса кинетического момента инерционных исполнительных органов КА, а на фигуре 2 - составляющие векторов кинетического момента и геомагнитной индукции в плоскости YZ и создаваемые магнитным исполнительным органом оси X полезный и паразитный механические моменты.
Описание способа сброса кинетического момента инерционных исполнительных органов КА
Определяются величины накопленного инерционными исполнительными органами кинетического момента и магнитной индукции магнитного поля Земли по трем координатным осям X, Y, Z. Формируются управляющие электрические сигналы и питающие напряжения для магнитных исполнительных органов по каждой координатной оси X, Y, Z, обеспечивающие силу токов в катушках электромагнитов магнитных исполнительных органов в соответствии с величинами кинетического момента, накопленного инерционными исполнительными органами, соответственно, по каждой координатной оси X, Y, Z. На выходах магнитных исполнительных органов формируются магнитные моменты, которые при воздействии с геомагнитным полем создают управляющие механические моменты для сброса кинетического момента накопленного инерционными исполнительными органами в оптимальном режиме по энергопотреблению.
Описание работы устройства
Устройство сброса кинетического момента инерционных исполнительных органов КА содержит блоки, обозначенные позициями на Фиг. 1:
датчики компонент геомагнитной индукции по трем координатным осям X, Y, Z - 1, 2, 3;
датчики компонент кинетического момента по трем координатным осям X, Y, Z - 4, 5, 6;
блок управления 7;
цифро-аналоговые преобразователи - 8, 9, 10;
компараторы - 11, 12, 13;
элементы И - 14, 15, 16;
электронные ключи - 17, 18, 19;
реверсивные коммутаторы - 20, 21, 22;
электромагниты - 23, 24, 25.
Устройство функционирует следующим образом. Как и в прототипе датчики компонент геомагнитной индукции по трем координатным осям X, Y, Z (1, 2, 3) вырабатывают сигналы координатных компонент индукции Вx, Вy, Bz, а датчики компонент кинетического момента по трем координатным осям X, Y, Z (4, 5, 6) измеряют кинетические моменты инерционных исполнительных органов (двигателей-маховиков) и вырабатывают сигналы Кx, Кy, Kz.
В качестве датчиков компонент геомагнитной индукции можно использовать, например, разработанный АО «Раменское приборостроительное конструкторское бюро» магнитометр цифровой трехкомпонентный МЦТ-8.
В качестве датчиков компонент кинетического момента можно использовать датчики угловых скоростей (смотри патент РФ №2070148).
На основе поступающих сигналов блок управления 7 вырабатывает сигналы, равные
σx=КyBz-KzBy;
σy=KzВx-КxBz;
σz,=КxBy-КyВx.
Блок управления 7 - это конструктивно завершенный микропроцессорный блок (например, на базе микропроцессора типа ADSP 2189NBCA-320), имеющий устройства связи, комплект программного обеспечения (или может быть выполнен, например, на отечественной однокристальной микроЭВМ серии 1816).
Данные сигналы σх, σy, σz в цифровом виде поступают на входы ЦАП (8, 9, 11), на выходах которых формируются значения напряжений, соответствующие цифровым кодам. ЦАП с выходом по напряжению может быть выполнен, например, на микросхеме КШ8ПА2.
При выполнении условия σi (i=x, y, z)>σo (σo - пороговый сигнал) на выходе компараторов (11, 12, 13) формируются сигналы логической "1". Пороговый сигнал σo может формироваться, например, в блоке управления 7. Компаратор может быть выполнен, например, на основе микросхемы компаратора напряжений LM339. Данный сигнал логической "1" поступает на входы элементов И (14, 15, 16) и при появлении на вторых входах данных элементов И сигнала запрета ao, соответствующему сигналу логической "1" на выходах элементов И (14, 15, 16) появляется сигнал управления (элементы И могут быть выполнены, например, на микросхеме К155ЛА8 с открытым коллекторным выходом), который открывает по управляющим входам электронные ключи (17, 18, 19) (электронные ключи могут быть выполнены, например, в виде транзисторных ключей). Через данные открытые электронные ключи (17, 18, 19) напряжения с выходов ЦАП (8, 9, 11) подаются на реверсивные коммутаторы (20, 21, 22) и являются напряжением питания, в результате чего в электромагнитах (23, 24, 25) формируются силы тока, которые прямо пропорционально данным значениям напряжений питания (значениям на выходах ЦАП 8, 9, 11), т.е. сигналам σx, σy, σz. На выходах электромагнитов (23, 24, 25) создаются магнитные моменты относительно координатных осей КА: Lx, Ly, Lz, значения которых соответственно пропорциональны сигналам σx, σy, σz.
Реверсивные коммутаторы (20, 21, 22) могут быть выполнены, например, в виде мостового переключателя и обеспечивают реверсивное управление электромагнитами (23, 24, 25). Описание работы реверсивных коммутаторов приведено в патенте РФ 2140128. В качестве магнитных исполнительных органов можно использовать, например, электромагниты стержневого типа (сердечник из магнитно-мягкого материала с обмотками из медного провода).
Для наглядной иллюстрации формирования сигнала запрета аo на фигуре 2 представлено графическое изображение составляющих векторов кинетического момента и геомагнитной индукции в плоскости Y Z и создаваемых магнитным исполнительным органом оси X полезного и паразитного механических моментов.
-KYZ - составляющая вектора кинетического момента;
-BYZ - составляющая вектора геомагнитной индукции.
Сомножитель BYZ Sinγ равен величине составляющей вектора -ВYZ, перпендикулярной вектору -КYZ. Эта составляющая геомагнитной индукции при включении магнитного исполнительного органа, формирующего магнитный момент Lx, создает полезный механический момент -Мпол. Величина BYZCosγ равна проекции вектора -BYZ на направление вектора -КYZ. При включении магнитного исполнительного органа эта составляющая геомагнитной индукции является причиной возникновения паразитного механического момента -Мпар, направление которого перпендикулярно составляющей -KYZ. Сигнал запрета ao соответствует сигналу логической "1" при условии -Мпол>-Мпар.
Таким образом достигается формирование оптимально требуемой силы тока в электромагнитах по каждой координатной оси X, Y, Z и соответственно величин магнитных индукций по каждой координатной оси X, Y, Z в соответствии с значениями σi (i=x, y, z). В результате осуществляется снижение энергопотребления, за счет экономии расхода электроэнергии магнитными исполнительными органами, уменьшается выделение тепла и создается более оптимальный управляющий механический момент, вызывающий отклонение КА от ориентированного положения при разгрузке кинетического момента.
В целом это определяет экономичный режим потребления электроэнергии и оптимальный режим работы системы ориентации КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ДВИГАТЕЛЕЙ-МАХОВИКОВ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568827C1 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2481250C1 |
Группа изобретений относится к управлению относительным движением космического аппарата (КА) путем его взаимодействия с геомагнитным полем. В способе определяют компоненты кинетического момента, накопленного инерционными исполнительными органами (ИО) КА, и геомагнитной индукции - по осям X, Y, Z. По этим данным формируют сигналы разгрузочных магнитных моментов по каждой оси X, Y, Z. Устройство включает в себя датчики указанных компонент кинетического момента и геомагнитной индукции, подключенные к входам блока управления, и магнитные ИО для формирования разгрузочных магнитных моментов. Введены также три цифро-аналоговых преобразователя, три компаратора, три элемента «И», три электронных ключа - обеспечивающих формирование магнитными ИО оптимальных по X, Y, Z - компонентам геомагнитной индукции разгрузочных моментов. Техническим результатом является снижение расхода электроэнергии (и выделения тепла) магнитными ИО. 2 н.п. ф-лы, 2 ил.
1. Способ сброса кинетического момента инерционных исполнительных органов КА, заключающийся в определении векторов накопленных инерционными исполнительными органами кинетических моментов и магнитной индукции магнитного поля Земли по трем координатным осям X, Y, Z и генерировании управляющих сигналов для магнитного исполнительного органа, на выходах которого формируются магнитные моменты по трем координатным осям X, Y, Z, определяемые напряжением источника питания, отличающийся тем, что формируют управляющие электрические сигналы и питающие напряжения для магнитного исполнительного органа по каждой координатной оси X, Y, Z, обеспечивающие силы токов в катушках электромагнитов магнитного исполнительного органа в соответствии с величинами кинетического момента, накопленного инерционными исполнительными органами соответственно по каждой координатной оси X, Y, Z, при этом на выходах магнитного исполнительного органа генерируются магнитные моменты, которые, взаимодействуя с магнитным полем Земли, создают управляющие механические моменты для сброса кинетического момента, накопленного инерционными исполнительными органами, в оптимальном режиме по энергопотреблению.
2. Устройство сброса кинетического момента инерционных исполнительных органов КА, включающее в себя датчики компонент кинетического момента по трем координатным осям X, Y, Z, датчики компонент геомагнитной индукции по трем координатным осям X, Y, Z, блок управления, к входам которого подключены упомянутые датчики; магнитный исполнительный орган, на выходах которого формируются сигналы управляющих магнитных моментов, отличающееся тем, что введены три цифро-аналоговых преобразователя, входы которых подключены к трем выходам блока управления; три компаратора, первые входы которых подключены к выходам цифро-аналоговых преобразователей, а на вторые входы подается пороговый сигнал; три элемента И, первые входы которых соединены с выходами компараторов, а вторые входы соединены с четвертым выходом блока управления; три электронных ключа, входы которых подключены к выходам цифро-аналоговых преобразователей, при этом управляющие входы электронных ключей соединены с выходами элементов И, а выходы электронных ключей соединены с входами магнитных исполнительных органов, содержащие последовательно соединенные реверсивные коммутаторы и электромагниты.
| А.П | |||
| Коваленко | |||
| Магнитные системы управления космическими летательными аппаратами | |||
| М., "Машиностроение", 1975 г., стр | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| US 3489372 A1, 13.01.1970 | |||
| US 4114841 A1, 19.09.1978 | |||
| US 9150313 B2, 06.10.2015. | |||

