Изобретение относится к области лазерной гидроакустики и может быть использовано для обнаружения и классификации подводных объектов, таких как подводные пловцы, мины, камни и другие неоднородности.
Известно устройство для получения характеристик подводных объектов акустическим и оптическим способом, содержащее импульсный лазер и оптические и акустические датчики. С помощью акустического датчика регистрируется отраженный от объекта акустический сигнал и может быть получена информация о положении подводного объекта, а с помощью оптического датчика регистрируется отраженный от объекта оптический сигнал, который позволяет судить о форме подводного объекта. (Патент US 8203911 В2, от 23.10.2007 г.).
Недостатком устройства является малая глубина проникновения света в морской воде, которая составляет величину 5-10 м, что ограничивает его возможности. Помимо этого это устройство не может классифицировать подводные объекты.
Наиболее близким по технической сущности и достигаемому результату к изобретению является лазерно-акустическая система обнаружения подводных объектов, содержащая импульсный лазер, расположенный на борту летательного аппарата, который используется для создания в объеме воды акустического источника звука, систему приемных гидрофонов, процессор, в который поступают сигналы с акустических приемников и данные об их геометрическом расположении.
(Патент US 20090201763 А, от 12.02. 2008 г.).
Недостаток устройства заключается в том, что оно не позволяет проводить классификацию обнаруженных объектов из-за того, что использование лазерно-акустического источника звука, расположенного в объеме воды, затягивает акустический сигнал за счет отражения от поверхности, при этом форма лоцирующего сигнала становится неконтролируемой и не позволяет эффективно классифицировать обнаруженный объект.
Техническим результатом изобретения является обеспечение возможности обнаружения и классификации подводных объектов.
Технический результат достигается за счет того, что в лазерно-акустической системе обнаружения подводных объектов, содержащей расположенный над поверхностью водоема источник акустических сигналов в виде лазера, установленный в фиксированной точке водоема приемный гидрофон и установленный над водной поверхностью вычислительный блок, соединенный с выходом приемного гидрофона, источник акустических сигналов выполнен в виде импульсного газоразрядного СO2 лазера с длиной волны лазерного излучения, обеспечивающей создание поверхностного сверхширокополосного импульса давления, приемный гидрофон выполнен широкополосным, а вычислительный блок содержит последовательно соединенные с выходом приемного гидрофона модуль сегментации, модуль памяти, коммутатор, модуль сравнения и модуль принятия решения, при этом выход модуля сегментации соединен с вторым входом коммутатора, а второй выход модуля памяти соединен с вторым входом модуля сравнения.
Сущность изобретения поясняется чертежом, на котором представлена блок-схема предлагаемой лазерно-акустической системы обнаружения подводных объектов.
Устройство содержит установленный над поверхностью водоема на мачте 1 импульсный газоразрядный СO2 лазер 2 с длиной волны лазерного излучения 10,6 мкм, обеспечивающей взрывное вскипание водной поверхности и создание поверхностного сверхширокополосного импульса давления, который используется для создания источника акустических сигналов 3 на поверхности водоема 4, регистрирующий излучение источника акустического сигнала 3, отраженное от подводного объекта 5, установленный в фиксированной точке водоема приемный широкополосный гидрофон 6, сигнал с которого поступает на вход установленного на платформе 7 вычислительного блока 8, содержащего последовательно соединенные с выходом приемного широкополосного гидрофона 6 модуль сегментации 9, модуль памяти 8, коммутатор 9, модуль сравнения 10 и модуль принятия решения 13, при этом выход модуля сегментации 9 соединен с вторым входом коммутатора 11, а второй выход модуля памяти 10 соединен с вторым входом модуля сравнения 12.
Устройство работает следующим образом. Луч импульсного газоразрядного СO2 лазера 2 направляется на поверхность водоема 4. Энергия излучения такого лазера поглощается в тонком поверхностном слое воды, что приводит к испарению слоя, и создает сверхширокополосный (СШП) импульс давления, являющийся источником акустических сигналов 3, которые достигают подводного объекта 5 и отражаются от него. При отражении СШП импульса, его форма и спектр будут существенно изменяться из-за вклада формы и ракурса объекта и вклада его собственных резонансов (в свою очередь, это несет информацию об упругих и поглощающих свойствах объекта). Форма же более узкополосных сигналов при отражении меняется несущественно, следовательно, информация о свойствах объекта теряется.
Импульсные сигналы характеризуются коэффициентом широкополосности
где ƒmax и ƒmin - верхняя и нижняя граничные частоты спектра соответственно.
Импульс, возникающий при облучении воды импульсом CO2 лазера, обеспечивает значение коэффициента широкополосности, близкое к рекордной величине ′Ω=2.
Такой импульс обеспечивает возможность не только обнаружения, но и классификацию подводной цели. Причем диаграмма направленности излучения близка к гауссовой и не имеет боковых лепестков. Помимо этого, такой источник звука почти не создает реверберационной помехи, приходящей от поверхности воды.
Отраженная от подводного объекта 5 звуковая волна регистрируется приемным широкополосным гидрофоном 6. Сигналы с гидрофона 6 поступают на вход модуля сегментации 9. Эхосигнал, зарегистрированный гидрофоном 6, содержит в своей форме такие же временные характеристики (длительность фазы сжатия и разрежения, соотношение их амплитуд), что и прямой сигнал (в отличие от шумовой и даже реверберационной помехи). В модуле сегментации 9 происходит деление эхосигнала на сегменты - временные отрезки зарегистрированных эхосигналов, которые соответствуют временным характеристикам исходного сигнала с некоторыми допусками и определение их параметров. Вычислительный блок 8 работает в двух режимах - режиме калибровки и рабочем режиме. Выбор режима происходит с помощью коммутатора 11.
В режиме калибровки отображаются и запоминаются в модуле памяти 10 вектора сегментов сигналов от известных мишеней, которые образуют кластеры (классов камней, рыбы, помех и т.п.).
В рабочем режиме, в модуле сравнения 12 происходит определение класса объекта по попаданию параметров сегментов эхосигнала в тот или иной кластер, хранящийся в модуле памяти 10. В модуле принятия решения 13 сравнивается заданный порог вероятности правильного решения с полученными значениями.
Таким образом, предложенное устройство позволяет по изменению сегментов эхосигналов в сравнении с калиброванными сигналами обнаруживать и классифицировать различные подводные объекты в контролируемом водоеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИДЕОСИСТЕМА ДЛЯ РЕГИСТРАЦИИ НЕШТАТНЫХ СИТУАЦИЙ НА СУДОХОДНЫХ РЕКАХ | 2016 |
|
RU2645425C1 |
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2444760C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РЕГИСТРАЦИИ ГИДРОАКУСТИЧЕСКИХ И ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587523C1 |
| ПРИЕМОИЗЛУЧАЮЩАЯ КОГЕРЕНТНАЯ ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА (ПИК-ГАС) | 2000 |
|
RU2204150C2 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОАКУСТИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2014 |
|
RU2577791C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| Способ гидролокационного обнаружения высокоскоростного малоразмерного объекта | 2020 |
|
RU2740158C1 |
Изобретение относится к лазерно-акустической системе обнаружения подводных объектов. Указанная система содержит расположенный над поверхностью водоема источник акустических сигналов в виде лазера, гидрофон и установленный над водной поверхностью вычислительный блок, соединенный с выходом приемного гидрофона. Источником акустических сигналов является импульсный газоразрядный СO2 лазер, длина волны излучения которого обеспечивает создание поверхностного импульса давления. Приемный гидрофон выполнен широкополосным. Вычислительный блок содержит последовательно соединенные с выходом приемного гидрофона модуль сегментации, модуль памяти, коммутатор, модуль сравнения и модуль принятия решения(классификации). Технический результат заключается в обеспечении возможности по изменению сегментов эхосигналов в сравнении с калиброванными сигналами обнаруживать и классифицировать различные подводные объекты в контролируемом водоеме. 1 ил.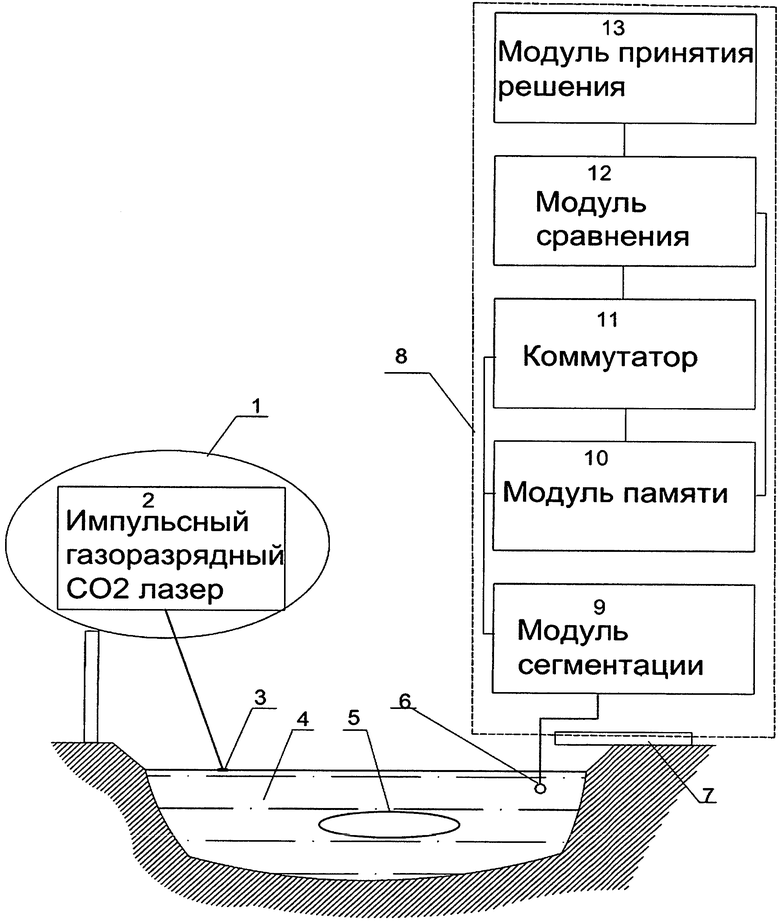
Лазерно-акустическая система обнаружения подводных объектов, содержащая расположенный над поверхностью водоема источник акустических сигналов в виде лазера, установленный в фиксированной точке водоема приемный гидрофон и установленный над водной поверхностью вычислительный блок, соединенный с выходом приемного гидрофона, отличающаяся тем, что источник акустических сигналов выполнен в виде импульсного газоразрядного СO2 лазера с длиной волны лазерного излучения, обеспечивающей создание поверхностного сверхширокополосного импульса давления, приемный гидрофон выполнен широкополосным, а вычислительный блок содержит последовательно соединенные с выходом приемного гидрофона модуль сегментации, модуль памяти, коммутатор, модуль сравнения и модуль принятия решения (классификации), при этом выход модуля сегментации соединен с вторым входом коммутатора, а второй выход модуля памяти соединен с вторым входом модуля сравнения.
| US 5646907 A1 08.07.1997 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| ЗАКРЫТЫЙ ИСТОЧНИК ИОНИЗИРУЮЩЕГО ИЗЛУЧЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2238121C2 |
| US 20090201763 А1 13.08.2009. | |||

