Область техники, к которой относится изобретение
[0001] Изобретение относится к системе и способу для определения местоположения транспортного средства с использованием ориентиров, установленных в известных местах. В связи с настоящим изобретением транспортным средством называется устройство, способное перемещаться под управлением человека и/или автоматики, причем не имеется никакого намерения ограничить данный термин определением, установленным правилами дорожного движения.
Уровень техники
[0002] Далее изобретение описывается с помощью иллюстративного, но неограничивающего примера системы погрузочно-разгрузочной обработки контейнеров в контейнерном терминале, например в порту. Работа типового контейнерного порта будет описана в степени, необходимой для понимания работы изобретения.
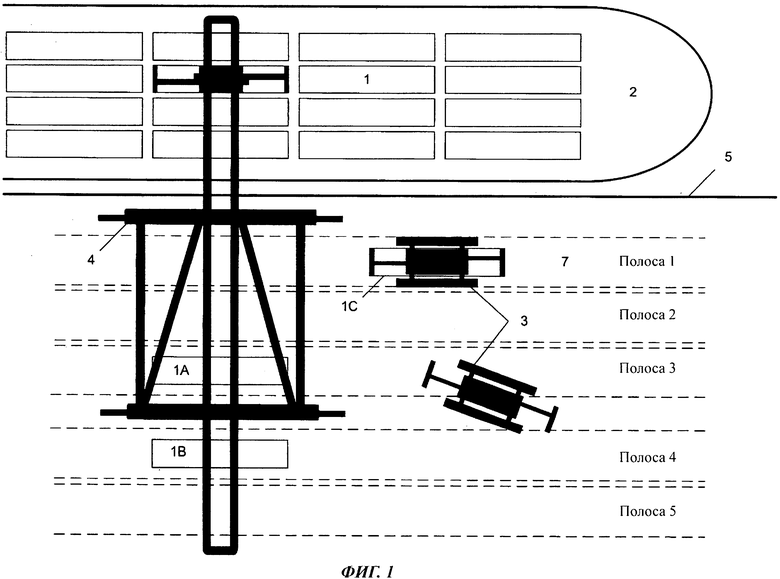
[0003] На фиг.1 показана разгрузка и погрузка контейнерного судна 2 посредством судового крана 4, когда работы в порту производятся портальными погрузчиками 3. Контейнеры 1 поднимают из контейнерных трюмов контейнерного судна 2 посредством контейнерного захвата, подвешенного на тросах судового крана 4, и опускают на нужную полосу 7 причала 5. Затем портальные погрузчики 3 забирают с земли разгруженные с судна контейнеры 1A и 1B и перевозят контейнеры на площадку хранения контейнеров. При погрузке судна процедуру выполняют в обратном порядке. При этом портальные погрузчики 3 привозят подлежащие погрузке контейнеры 1C с площадки хранения контейнеров и укладывают их под судовым краном 4 на нужную полосу 7, с которой судовой кран 4 затем их забирает и поднимает на борт судна 2.
[0004] Подавляющее большинство международных грузовых перевозок выполняется с помощью контейнеров 1, как показано на фиг.1. Контейнеры представляют собой транспортные единицы стандартной геометрической формы, в которые упаковывают грузы на время транспортировки. Обычно контейнеры имеются в трех различных типоразмерах по длине - 20 футов, 40 футов или 45 футов. Ширина контейнера составляет приблизительно 2,5 метра. Контейнеры прибывают в контейнерный порт и соответственно покидают его, будучи транспортируемыми контейнерным судном 2, контейнерными грузовиками или контейнерными поездами. Транспортная единица стандартной формы значительно ускоряет погрузочно-разгрузочную обработку грузов на различных стадиях транспортировки, особенно на погрузке и разгрузке контейнерного судна, а также при перегрузке с морского транспорта на наземный транспорт и наоборот.
[0005] Погрузка-разгрузка контейнеров в контейнерном порту выполняется специальными контейнерными кранами 3, включающими в себя портальные погрузчики, контейнерные перегружатели на рельсовом ходу (RMG), контейнерные перегружатели на резиновых шинах (RTG), ричстакеры, различные вилочные погрузчики, а также комбинации трактор-трейлер. Специальным типом перегружателя на рельсовом ходу является судовой кран 4, используемый для подъема контейнеров, разгружаемых с судна на причал 5, и, соответственно, для погрузки на борт контейнерного судна поступивших на причал контейнеров.
[0006] Вышеупомянутый портальный погрузчик, например, способен перемещаться на своих резиновых шинах по всей портовой зоне, забирая контейнеры с земли или из штабелей, устанавливая контейнеры друг на друга или помещая контейнер на платформу контейнерного грузовика или на землю. Когда контейнеры укладывают на землю в портовой зоне, они обычно помещаются на специальные прямоугольные участки 6 или на отдельные полосы 7, которые обозначены, например, краской на земле и названы или пронумерованы для того, чтобы можно было легко записывать местоположения контейнеров.
[0007] Текущей задачей является автоматизация контейнерных кранов 3 таким образом, чтобы упростить и ускорить работу оператора контейнерного крана или чтобы полностью устранить оператора машины по перемещению контейнеров, чтобы в этом случае машина по перемещению контейнеров работала без оператора, автономно.
[0008] Если ставится задача облегчения работы оператора, то обычно один из рабочих этапов рабочего цикла выполняется автоматически под управлением компьютера. Тогда ставится задача ускорения этого конкретного рабочего этапа, повышения точности, надежности или безопасности или просто облегчения работы оператора.
[0009] Если оператор полностью устраняется из кабины управления машины для перемещения контейнеров и машина для перемещения контейнеров работает без присутствия человека, тогда значительная часть рабочих этапов машины для перемещения контейнеров выполняется автоматически, под управлением цифрового управляющего устройства (устройства обработки данных, коротко - «компьютера»). Рабочие этапы, которые не могут быть надежно выполнены автоматически компьютером, как известно, могут быть выполнены с применением специальной технологии дистанционного управления, и в этом случае один или несколько человек в течение некоторого времени управляют машинами для перемещения контейнеров в режиме дистанционного управления, например с помощью видеосъемки в режиме реального времени и радиосвязи. Управление машинами для перемещения контейнеров без присутствия человека создает условия для значительной экономии расходов, так как становится возможным эксплуатация большого количества машин для перемещения контейнеров несколькими работниками.
[0010] Некоторыми из важных задач, подлежащих автоматизации, являются: а) автоматическое управление машиной для перемещения контейнеров путем следования по нужным маршрутам и b) автоматизация учета контейнеров.
[0011] Как будет понятно специалистам, если машину для перемещения контейнеров планируется эксплуатировать без оператора, то характеристика по пункту а) является существенно необходимой, так как большая часть времени рабочего цикла уходит на управление машиной для перемещения контейнеров в портовой зоне. Характеристика по пункту b) является полезной в работе, как с присутствием человека, так и без присутствия человека.
[0012] Общим требованием к автоматизации характеристик а) и b) является то, что местоположение машины для перемещения контейнеров в портовой зоне должно быть известно обычно с точностью до приблизительно 10 сантиметров. Настоящее изобретение облегчает автоматизацию машины для перемещения контейнеров за счет создания условий для определения в режиме реального времени точного местоположения и направления движения машины 3 для перемещения контейнеров.
[0013] Далее рассмотрим фиг.2. Машина 3 для перемещения контейнеров, прежде всего, 1) должна быть обеспечена системой 8 определения положения, способной непрерывно измерять местоположение машины для перемещения контейнеров с точностью до приблизительно 10 сантиметров. Во вторых, если измеряемое местоположение отклоняется от заданного или запланированного маршрута 17 машины для перемещения контейнеров, то управляющие устройства машины для перемещения контейнеров должны регулироваться таким образом, чтобы машина для перемещения контейнеров вернулась на заданную траекторию. Обычно, если можно выполнить условие 1), то условие 2) не является проблематичным для машин 3 для перемещения контейнеров в плане технологий реализации. Условие 1), наоборот, является сложным для выполнения при использовании известных технологий.
[0014] Как будет понятно специалистам, по причинам безопасности машина для перемещения контейнеров, на которой отсутствует человек, вообще не может перемещаться компьютером, если не будет известно реальное местоположение или направление движения машины для перемещения контейнеров. Если машина для перемещения контейнеров будет перемещена компьютером при неизвестном реальном местоположении или направлении движения, то возникнет опасность столкновения машины для перемещения контейнеров с контейнерами, другими кранами или зданиями, которые могут располагаться на запланированном маршруте. Следовательно, абсолютным требованием, предъявляемым к системе 8 определения местоположения, является то, чтобы данные измеряемого местоположения были непрерывными и чтобы измерение местоположения не прерывалось каким-либо внешним нарушающим фактором.
[0015] Как также будет понятно специалистам, данные о местоположении и направлении, измеренные системой 8 определения положения, должны поступать без задержек и в режиме реального времени, так как машина 3 для перемещения контейнеров, например портальный погрузчик, может за одну секунду переместиться на расстояние до десяти метров, что означает, что возможные отклонения от заданного маршрута должны обнаруживаться как можно быстрее, чтобы не допустить возникновения опасных ситуаций. Обычно считается достаточным выполнять в секунду приблизительно 10…20 измерений местоположения.
[0016] Как было указано выше, другое применение системы 8 определения местоположения машины для перемещения контейнеров согласно настоящему изобретению связано с автоматизацией учета контейнеров и автоматическим контролем местоположения контейнеров в портовой зоне. После того как контейнер 1 был разгружен с судна 2, машина для перемещения контейнеров (либо управляемая человеком, либо находящаяся под автоматическим управлением компьютера) забирает контейнер на специальную площадку складирования контейнеров, где контейнеры обычно размещаются рядами штабелей. Ряды контейнеров и отдельные места или прямоугольные участки 6 хранения контейнеров (см. фиг.2) обычно размечены краской на земле и обозначены таким образом, чтобы каждый прямоугольный участок хранения контейнеров мог быть однозначно идентифицирован, чтобы прямоугольные участки хранения контейнеров можно было отличить друг от друга при учете контейнеров. Одиночные контейнеры помещают в штабель друг на друга на этих прямоугольных участках. Местоположение каждого одиночного контейнера (обычно идентификатор прямоугольного участка и яруса штабеля) на складской площадке сохраняется в специальной Системе управления контейнерным терминалом (TOS), обеспеченной соответствующей базой данных. Ставится задача автоматизации контроля местоположения контейнера на каждой фазе его перемещения с целью предотвращения проблем, вызванных человеческими ошибками, особенно тех, которые допускают операторы машин 3 для перемещения контейнеров. Если на складской площадке оператор машины для перемещения контейнеров доставит контейнер 1 в местоположение 6, отличающееся от местоположения, предполагаемого системой TOS, или, альтернативно, оператор машины для перемещения контейнеров введет в систему TOS ошибочное местоположение контейнера, тогда впоследствии разыскать контейнер на складской контейнерной площадке будет проблематично. В частности, если нужно разыскать контейнер на складской площадке в процессе загрузки судна, то расходы будут очень большими, поэтому принципиальной задачей является сокращение до минимума времени погрузки и разгрузки судов в портах.
[0017] Уровень техники позволяет контролировать местоположение контейнера на контейнерной складской площадке, например, с помощью технологии спутниковой навигации (GPS), если в зоне не присутствуют крупногабаритные конструкции, такие как краны или здания, которые могут создавать помехи прохождению GPS-сигнала. В этом случае машину 3 для перемещения контейнеров соответственно снабжают принимающей GPS-антенной 12 и GPS-оборудованием для контроля местоположения машины для перемещения контейнеров с интервалом в 1 секунду, например. Кроме того, электрически контролируя действия поворотных замков машины для перемещения контейнеров 3, можно обнаруживать моменты захвата контейнера и оставления контейнера в контейнерном штабеле или на земле в определенный момент времени. Так как естественно предполагается, что контейнер 1 не перемещается иным образом, кроме как машиной для перемещения контейнеров, то имеется возможность контролировать местоположение контейнера столь долго, сколько машина для перемещения контейнеров перемещается на открытом пространстве, в зоне покрытия навигационных спутников GPS.
[0018] Однако GPS-технология определения местоположения не работает одинаково надежно во всей портовой зоне, так как GPS-антенна 12 для того, чтобы иметь возможность надежного расчета местоположения, должна поддерживать визуальный контакт, как правило, по меньшей мере с пятью GPS-спутниками одновременно. Крупногабаритные контейнерные краны, такие как судовой кран 4, не позволяют радиосигналам GPS проходить через себя без помех, тем самым создавая зоны радиотени и снижая точность определения местоположения по GPS. Так как прямоугольные участки 6 для контейнеров могут располагаться бок о бок друг с другом на расстоянии, примерно равном ширине контейнера, то есть 2,5 м, точность определения местоположения по GPS должна быть значительно больше этой величины, для того, чтобы прямоугольный участок 6 или полоса 7 определялись правильно. Например, технология GPS неспособна надежно обнаружить то, в каком именно местоположении или на какой именно полосе 7, в частности (см. фиг.1) под судовым краном, машина для перемещения контейнеров 3 оставляет контейнер или с какой именно полосы машина для перемещения контейнеров забирает контейнер. Аналогичная проблема появляется, когда определение местоположения по GPS используют вблизи других больших контейнерных кранов 3 (например, кранов RTG или RMG) или под ними.
[0019] При разгрузке судна, например, особую проблему представляет ситуация, когда судовым краном 4, например, на землю причала на соседние полосы укладывают более одного контейнера. Такую ситуацию, например, иллюстрируют показанные на фиг.1 контейнеры 1A и 1B. Если от машины для перемещения контейнеров не имеется какой-либо информации об определении местоположения, тогда будет невозможно знать наверняка, какой именно из контейнеров заберет прибывающая под кран машина для перемещения контейнеров. Следовательно, также невозможно знать наверняка, в каких местоположениях на контейнерном складе в конце концов окажутся контейнеры 1A и 1B, что сделает невозможным осуществление автоматического контроля местоположения контейнеров. Аналогичным образом при погрузке судна невозможно будет знать наверняка, на какой полосе машина 3 для перемещения контейнеров оставит контейнер. Эту проблему иллюстрирует изображенный на фиг.1 контейнер 1C. В этом случае невозможно автоматически гарантировать, что контейнер 1C будет правильно погружен на борт судна.
[0020] Несомненно, имеется возможность, чтобы при погрузке и разгрузке судна кто-либо на причале 5 наблюдал за работой и т.д. для гарантии того, что машина 3 для перемещения контейнеров и судовой кран 4 забирают именно те контейнеры, которые нужно. Однако этот этап подвержен человеческим ошибкам, которые можно предотвратить с помощью автоматики. Кроме того, любой находящийся на причале человек не только является источником дополнительных расходов, но и потенциально может попасть в опасную ситуацию, так как в портах происходят несчастные случаи, даже со смертельным исходом, из-за наезда машин для перемещения контейнеров на людей.
[0021] Публикация ЕР 0185816 A1, например, раскрывает способ определения местоположения транспортного средства с помощью лазерного сканера и световозвращающих отражателей. Однако публикация не раскрывает ни одного действующего способа определения местоположения, причем систематически делаются некорректные выводы из определения местоположения. Основанные на триангуляции способы, раскрытые в публикации ЕР 0185816 A1, могли бы работать, если бы направления от транспортного средства до ориентиров были бы абсолютными направлениями, привязанными к земле, но это не так, потому что транспортное средство поворачивается относительно земли. Так как местоположение транспортного средства неизвестно, способы согласно публикации ЕР 0185816 A1 систематически страдают от проблемы, состоящей в том, что количество неизвестных факторов превышает количество известных факторов, что делает невозможным решение систем уравнений, где таковые имеются.
Сущность изобретения
[0022] Таким образом, целью настоящего изобретения является обеспечение способа и реализующего его устройства, которые позволяют уменьшить или устранить по меньшей мере одну из вышеуказанных проблем. Цель изобретения достигается за счет способа и системы, отличительные признаки которых раскрыты в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
[0023] Одним из аспектов настоящего изобретения является система для определения местоположения транспортного средства в окружающей обстановке, обеспеченной по меньшей мере одним ориентиром, местоположение которого известно. Система включает в себя по меньшей мере один сканирующий датчик расстояния, установленный на транспортном средстве и выполненный с возможностью измерения расстояния и направления от транспортного средства до указанного по меньшей мере одного ориентира. Система также включает в себя устройство обработки данных, выполненное с возможностью сохранения в запоминающем устройстве местоположения указанного по меньшей мере одного ориентира; и определения местоположения транспортного средства исходя из местоположения указанного по меньшей мере одного ориентира, а также исходя из расстояния и направления от транспортного средства до указанного по меньшей мере одного ориентира.
[0024] Другим аспектом настоящего изобретения является способ определения местоположения транспортного средства в окружающей обстановке, обеспеченной по меньшей мере одним ориентиром, местоположение которого известно. Способ включает в себя следующие шаги, выполняемые устройством обработки данных: 1) прием от по меньшей мере одного сканирующего датчика расстояния, установленного на транспортном средстве, информации о расстоянии и направлении от транспортного средства до указанного по меньшей мере одного ориентира; 2) сохранение в запоминающем устройстве местоположения указанного по меньшей мере одного ориентира; и 3) определение местоположения транспортного средства на основании местоположения указанного по меньшей мере одного ориентира, а также на основании расстояния и направления от транспортного средства до указанного по меньшей мере одного ориентира.
[0025] Таким образом, система определения местоположения машины для перемещения контейнеров согласно настоящему изобретению построена на сканирующих датчиках расстояния, установленных на транспортном средстве, например, на машине для перемещения контейнеров, и на ориентирах, обеспеченных в известных местоположениях. Датчик расстояния обычно является датчиком, основанным на лазерной технологии, в частности на технологии измерения времени прохождения лазерного луча, однако система согласно настоящему изобретению может быть также реализована с использованием другого датчика, обеспечивающего соответствующие измеряемые величины. В настоящем изобретении под ориентиром понимается объект, обеспеченный в известном местоположении и имеющий четко определенный набор характеристик, позволяющих отличить данный ориентир от других объектов в поле зрения сканирующего датчика расстояния. Такой набор характеристик может включать в себя форму ориентира. Форма объекта в поле зрения датчика расстояния может быть определена, например, путем измерения расстояния до объекта во множестве направлений с интервалами по времени, достаточно короткими для того, чтобы можно было пренебречь расстоянием, пройденным транспортным средством за время измерения расстояний во множестве направлений. Если форма объекта, определенная на основании множества направлений и расстояний, совпадает с формой ориентира, хранящейся в запоминающем устройстве устройства обработки данных, то обнаруженный объект можно считать ориентиром. Предпочтительно, форма ориентира является цилиндрической, так как имеющий такую форму ориентир выглядит одинаково независимо от направления наблюдения. Вместо формы или в дополнение к ней, набор характеристик ориентира может, например, включать в себя размер и/или цвет.
[0026] Предпочтительно, чтобы для улучшения точности данных местоположения система измеряла расстояние и направление от транспортного средства по меньшей мере до двух ориентиров. Однако транспортное средство может попадать в ситуации, когда невозможно будет измерить расстояние до двух ориентиров одновременно. Эта остаточная проблема может быть решена таким образом, что систему выполняют с возможностью измерения указанного расстояния и направления от транспортного средства по меньшей мере до двух ориентиров в различные моменты с определением изменения курса и/или местоположения транспортного средства за время, прошедшее между этими двумя различными моментами измерений. Изменение местоположения транспортного средства за время между различными моментами измерений может быть определено, например, с помощью спутниковой навигации. Альтернативно, может быть использована технология, способная хотя бы на ограниченное время определять изменения местоположения и курса транспортного средства. Примером такой технологии может служить установленный на транспортном средстве гироскоп. Альтернативно, изменения местоположения и курса транспортного средства могут быть определены путем контроля угла поворота рулящих колес транспортного средства и с использованием датчика измерения расстояния, калибровочные данные которого могут быть основаны, например, на известных данных местоположения, относящихся к ориентирам. В данном случае, если указанный по меньшей мере один ориентир не может быть обнаружен, то местоположение транспортного средства может быть определено счислением пути, то есть без внешних наблюдений.
[0027] Отличительным признаком настоящего изобретения, таким образом, является применение датчика расстояния для определения местоположения транспортного средства по известным местоположениям ориентиров. Кроме того, за счет использования выдаваемой датчиками расстояния информации о возможных препятствиях на пути движения транспортного средства может быть снижена опасность столкновения транспортных средств. Система может остановить транспортное средство в случае обнаружения в направлении движения транспортного средства или вблизи него препятствия, с которым может произойти столкновение. Это является особенно полезной характеристикой, если система выполнена с возможностью автоматического управления транспортным средством, в некоторых случаях даже без присутствия человека.
[0028] Само собой разумеется, что сканирующие лазерные датчики при работе без присутствия человека могут использоваться в качестве предохранительных датчиков машины для перемещения контейнеров для предотвращения столкновений. Работающая без присутствия человека машина для перемещения контейнеров, такая как портальный погрузчик, может быть оснащена системой датчиков предотвращения столкновений, которая может быть реализована с применением сканирующих датчиков расстояния. С целью недопущения столкновения машины для перемещения контейнеров с людьми, контейнерами, другими машинами для перемещения контейнеров или зданиями, возможно находящимися вдоль запланированного маршрута, машина для перемещения контейнеров может быть обеспечена обычно четырьмя сканирующими лазерными датчиками, способными видеть объекты в своем окружении, например, на расстоянии до 30…80 метров, с зоной обзора 180 градусов, например. Настоящее изобретение и его предпочтительные варианты осуществления позволяют эту же систему датчиков использовать также и для определения местоположения транспортного средства, например машины для перемещения контейнеров, с помощью специальных неподвижных ориентиров, местоположение которых известно. Использование одних и тех же датчиков для нескольких различных целей позволяет достигать значительной экономии средств.
[0029] В типовом, но не ограничивающем варианте осуществления настоящего изобретения транспортное средство является машиной для перемещения контейнеров или другим устройством, выполненным с возможностью перемещения груза из одного места в другое. Система согласно настоящему изобретению, следовательно, может способствовать автоматизации логистики за счет того, что система управления выполнена с возможностью определения места разгрузки перевозимого транспортным средством груза путем определения местоположения транспортного средства в момент, когда транспортное средство разгружает груз. Другими словами, система управления транспортного средства может информировать, например, систему логистики порта или другого грузового терминала о том, что перевезенный транспортным средством контейнер оставлен в местоположении, определяемом местоположением транспортного средства в момент разгрузки им груза. Дополнительно, система может быть выполнена с возможностью идентификации груза по местоположению, откуда транспортное средство забирает груз. Другими словами, системой логистики обеспечивается информация, указывающая конкретное местоположение конкретного контейнера, и когда транспортное средство забирает контейнер из этого местоположения, идентификационная информация о контейнере обеспечивается системой логистики.
[0030] Далее настоящее изобретение раскрывается подробнее на предпочтительных вариантах осуществлениях со ссылкой на сопроводительные чертежи, на которых:
фиг.1 показывает разгрузку и погрузку контейнерного судна с помощью судового крана и работающих в порту портальных погрузчиков;
фиг.2 показывает движение машины для перемещения контейнеров под управлением компьютера по заданному маршруту и перевозку им груза, такого как контейнер;
фиг.3 является видом сбоку несущей контейнер машины для перемещения контейнеров;
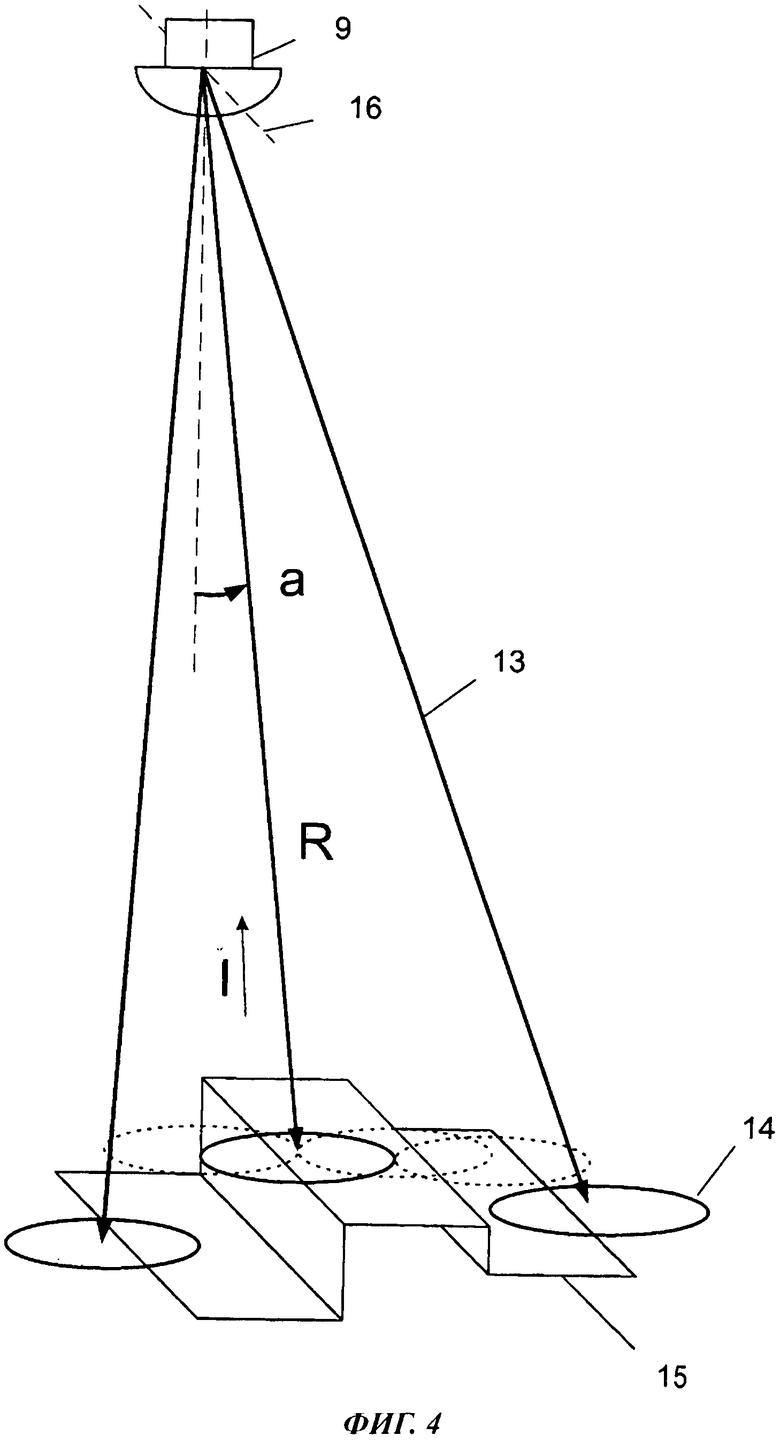
фиг.4 показывает принцип действия сканирующего лазерного датчика;
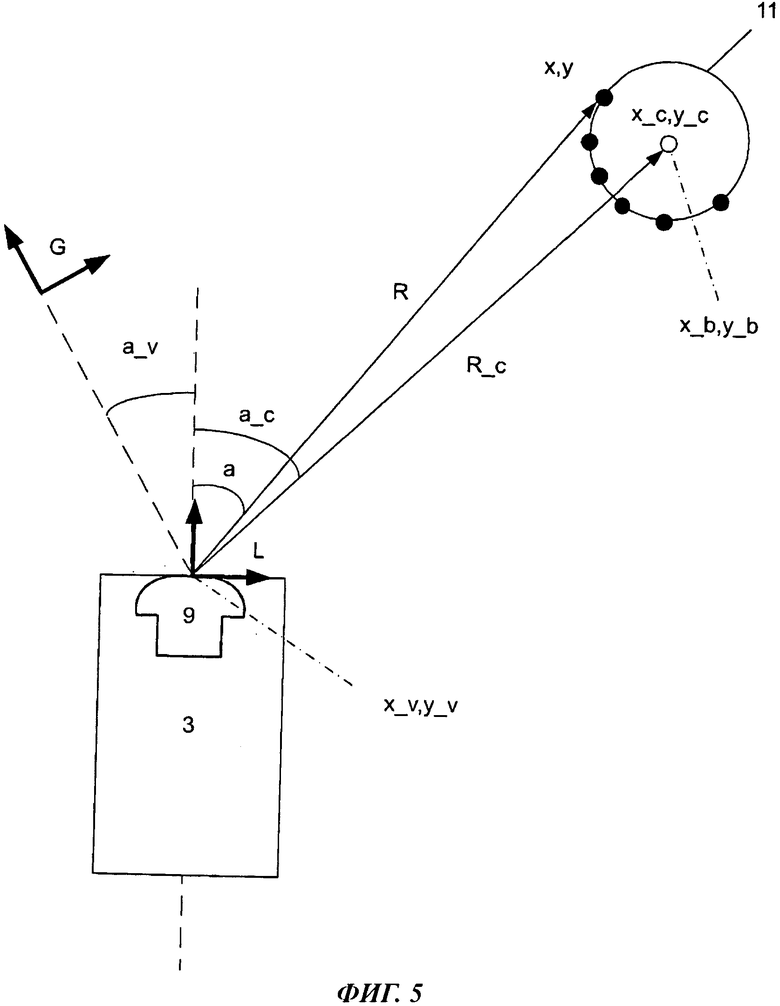
фиг.5 показывает координаты и переменные, используемые при обнаружении ориентира и определении местоположения транспортного средства;
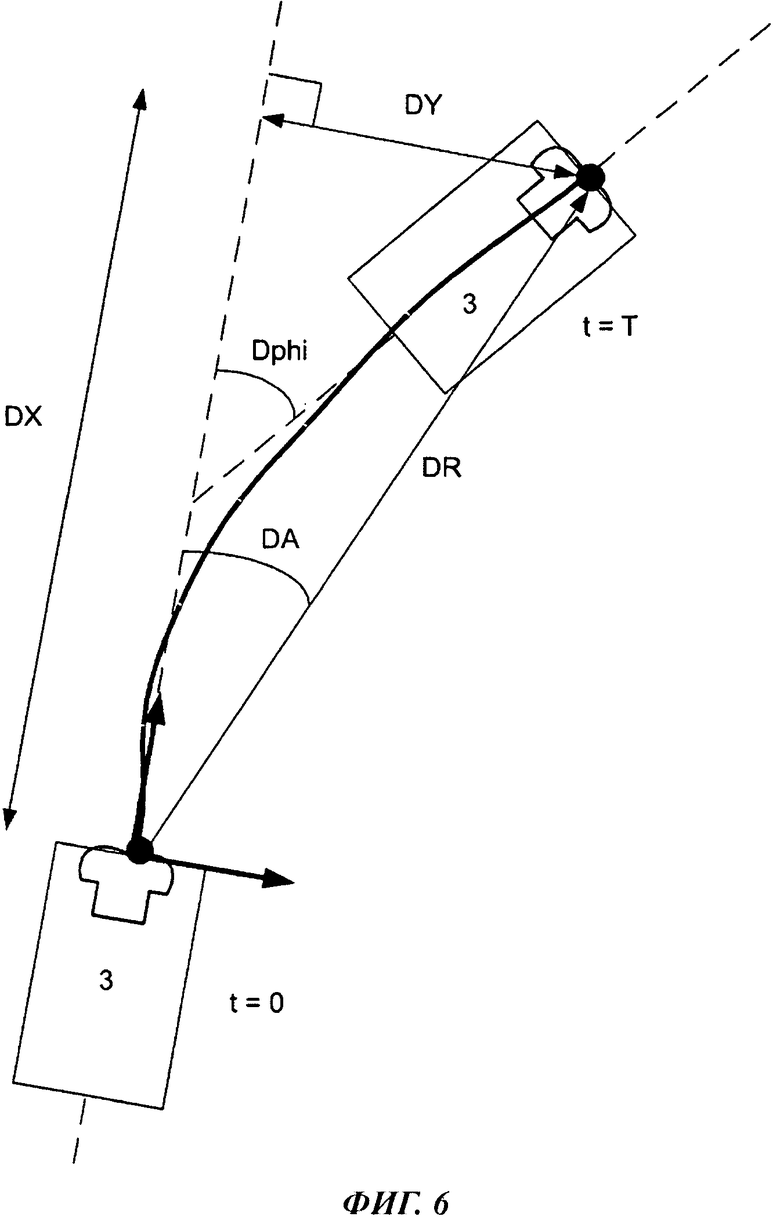
фиг.6 иллюстрирует переменные, используемые при счислении пути; и
фиг.7 и 8 показывают различные способы определения местоположения транспортного средства в ситуации, когда ориентиры могут иногда исчезать из поля зрения транспортного средства.
[0031] На фиг.4 показан принцип действия сканирующего лазерного датчика 9. Лазерный датчик расстояния испускает импульс 13 лазерного света, который отражается от объекта 15, который может стоять на пути луча 14, и некоторая часть лазерного света возвращается в светоприемник лазерного датчика расстояния. Лазерный датчик расстояния определяет время прохождения света между моментами испускания и приема светового импульса и по времени прохождения света рассчитывает расстояние R до отражающего объекта. Лазерный датчик расстояния прикреплен к ротору, вращающемуся относительно своей оси 16, а импульсы 13 лазерного света испускаются с определенной частотой. Обычно тогда лазерные лучи 14 перекрывают друг друга, не оставляя зазоров между импульсами лазерного света, что позволяет обнаруживать даже малые объекты 15. Используя свою внутреннюю сенсорную систему, сканирующий лазерный датчик 9 расстояния также измеряет угол излучения лазерного луча 13.
[0032] Со ссылкой на фиг.4 работа лазерного датчика 9 расстояния описывается в степени, достаточной для понимания работы системы согласно настоящему изобретению.
[0033] На первом этапе лазерный датчик расстояния излучает импульс 13 лазерного света, ширина луча 14 которого на расстоянии 20 метров обычно составляет примерно 10…20 см. Излученный лазерный свет может быть видимым глазу или невидимым глазу (например, инфракрасное излучение, ИК лазер). На втором этапе испущенный световой импульс отражается от объекта 15, который может стоять на пути луча 14, и некоторая часть лазерного света возвращается в светоприемник лазерного датчика расстояния. Лазерный датчик расстояния сохраняет способность обнаружения отражения импульса 13 лазерного света на расстоянии 40 метров, например, даже если отражающий объект будет матово-черным по цвету и отразит назад только 10 процентов упавшего на него света. Если объект по цвету будет более светлым, например, как ориентир 11, и отразит большую часть упавшего на него света (например, 90 процентов), то будет иметься возможность обнаружения объектов на гораздо большем расстоянии, даже на расстоянии ста метров. На третьем этапе лазерный датчик расстояния определяет время прохождения света между моментами испускания и приема светового импульса. На четвертом этапе исходя из времени прохождения света рассчитывается расстояние R от лазерного датчика до отражающего объекта и результат выдается пользователю датчика расстояния. Обычно в дополнение к информации о расстоянии R также выдается сила I измеряемого отраженного сигнала, которая пропорциональна расстоянию до отражающего объекта и его цвету.
[0034] Также на фиг.4 показано, что сканирующий лазерный датчик 9 расстояния работает таким образом, что вышеописанный лазерный датчик расстояния прикреплен к ротору, который быстро (например, с частотой 50 оборотов в секунду) вращается вокруг своей оси 16, при этом импульсы 13 лазерного света испускаются с такой частотой, что следующий световой импульс испускается сразу же после завершения предыдущего измерения расстояния R. Обычно при этом лазерные лучи 14 перекрывают друг друга таким образом, что между импульсами лазерного света не остается зазоров, что позволяет обнаруживать даже малые объекты 15.
[0035] Обычно ось 16 вращения сканирующего лазерного датчика расстояния установлена перпендикулярно лучам 13 лазерного света. Сканирующий лазерный датчик расстояния, естественно, способен измерять угол испускания (угол а вращения) лазерного луча 13 в режиме реального времени посредством внутренней сенсорной системы. Таким образом, обычно датчик расстояния для каждого отдельного лазерного измерения расстояния выдает следующую информацию: угол а измерения, измеряемое расстояние R, а также, возможно, и силу I отражения.
[0036] Как было отмечено выше, система согласно настоящему изобретению может быть реализована с использованием других датчиков, выдающих измеренные переменные {a, R} или {a, R, I}, и поэтому не ограничивается использованием исключительно лазерной технологии.
[0037] На фиг.2 показана машина 3 для перемещения контейнеров, движущаяся, например, под управлением компьютера по заданному маршруту 17, перевозя свой груз, например в данном случае контейнер, на прямоугольный участок для контейнеров в складской зоне. Машина 3 для перемещения контейнеров оснащена четырьмя сканирующими лазерными датчиками 9, которые в зонах 10 контроля наблюдают за объектами, видимыми, например, при угле раскрытия 180 градусов, которые могут быть другими машинами 3′ для перемещения контейнеров, стоящими на земле контейнерами 1 или специальными навигационными ориентирами 11. Лазерные датчики 9 могут использоваться как для предотвращения столкновений с обнаруженными объектами, так и для определения местоположения и курса машины 3 для перемещения контейнеров с помощью ориентиров 11. Кроме того, на крыше машины для перемещения контейнеров установлена антенна 12 системы спутниковой навигации GPS, которая также может быть использована в качестве вспомогательного средства для определения местоположения машины 3 для перемещения контейнеров.
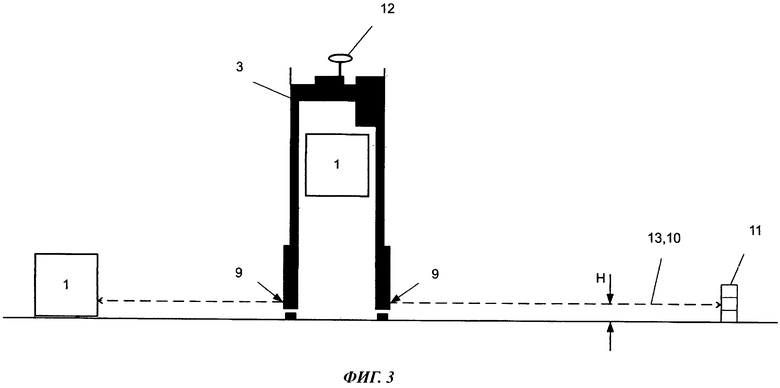
[0038] На фиг.3 показан вид сбоку машины 3 для перемещения контейнеров, перевозящей контейнер 1. Машина 3 для перемещения контейнеров оснащена сканирующими лазерными датчиками 9, наблюдающими за находящимися поблизости объектами, например стоящими на земле контейнерами 1 и специальными навигационными ориентирами 11. Лазерные датчики 9 установлены горизонтально на высоте, позволяющей использовать их как для предотвращения столкновений с обнаруженными объектами, так и для определения местоположения и курса машины 3 для перемещения контейнеров с помощью ориентиров 11. Высота ориентиров 11 и лазерных датчиков 9 была подобрана так, что лазерный луч 13 попадает на ориентир 11, например, приблизительно посередине. Кроме того, на крыше машины для перемещения контейнеров установлена антенна 12 системы спутниковой навигации GPS, которая также может быть использована в качестве вспомогательного средства для определения местоположения машины 3 для перемещения контейнеров.
[0039] Далее со ссылкой на фиг.2 и фиг.3 раскрывается работа системы определения местоположения в соответствии с изобретением и/или предпочтительные варианты ее осуществления. В предпочтительном, но не ограничивающем варианте осуществления настоящего изобретения обеспечиваются соответствующим образом расставленные в портовой зоне специальные ориентиры 11, которые могут иметь, например, цилиндрическую форму. В неограничивающем примере высота ориентира может составлять, например, 1,5 метра, а его диаметр соответственно может составлять 60…80 сантиметров. Цилиндрические ориентиры могут быть выполнены, например, из бетонных колодезных колец, которые, например, могут быть поставлены друг на друга в количестве трех штук (смотри, например, фиг.3). То есть конструкция ориентиров очень недорога и долговечна. Для улучшения отражения лазерного излучения ориентиры могут быть покрашены, например, в белый или желтый цвет. Круглая цилиндрическая форма ориентира облегчает его идентификацию, так как форма будет выглядеть одинаковой со всех сторон. Однако, как понятно специалистам, это не является необходимым для реализации системы согласно настоящему изобретению.
[0040] В одном варианте осуществления системы определения местоположения согласно настоящему изобретению, машина для перемещения контейнеров оснащена по меньшей мере одним сканирующим лазерным датчиком 9; однако обычно сканирующих лазерных датчиков 9 бывает несколько, например четыре. Относительно поверхности земли датчики могут быть установлены на высоте Н, которая может составлять, например, от 0,5 до 1 метра, предпочтительно, примерно 0,75 м (см. фиг.3). В таком случае лазерное сканирование 10 выполняется горизонтально. При этом лазерные лучи 13 падают на ориентир 11 где-то посередине по вертикали, и, несмотря на какой-либо небольшой наклон машины для перемещения контейнеров, лазерные лучи всегда смогут видеть ориентир.
[0041] Специалистам будет понятно, что, если, например, лазерные лучи сканирующего лазерного датчика падают на цилиндрический ориентир 11, как показано на фиг.5, то по значениям угла а и показаниям расстояния R, измеряемого датчиком 9, можно рассчитать измеренные координаты (x, y) поверхности цилиндра относительно координатной системы L, привязанной к датчику 9, по формуле (1):
и по ним, например, очертив круг, можно далее определить измеряемый центр (x_с, y_с) цилиндра (круга) в координатной системе L. Затем мы вычисляем, также в координатной системе L, измеряемое значение угла (a_с) центра цилиндра и измеряемое значение расстояния (R_c), например, по формуле:


где, как известно, arctan2() является аркфункцией четырех квадрантов. Затем, при использовании информации о реальном, ранее известном местоположении центра (x_b, y_b) ориентира 11 в абсолютной, привязанной к земле координатной системе G порта, мы отмечаем, что местоположение и курс (x_v, y_v, a_v), определенные в земной координатной системе G датчика 9, а также значения в координатной системе L, измеряемые датчиком 9, образуют следующие уравнения:

[0042] Как будет понятно специалистам, обнаружение одного вращательно-симметричного ориентира 11 описанным способом не определяет однозначно местоположение и курс (x_v, y_v, a_v) датчика 9 и одновременно машины 3 для перемещения контейнеров, так как требуется найти три переменные, но имеется только два математических уравнения. Если курс (a_v) был определен ранее и поддерживался, например, с помощью гироскопа, то система (3) уравнений может быть решена, и местоположение машины для перемещения контейнеров может быть определено. Если бы геометрическая форма ориентира была явно ассиметричной и достаточно большой (например, если в качестве ориентира был использован контейнер) для того, чтобы можно было также с достаточной точностью определить измеряемый курс ориентира в координатной системе L (phi_c), то местоположение и курс (x_v, y_v, a_v) машины для перемещения контейнеров были бы тогда однозначно определяемыми, например, решением системы уравнений:

[0043] Переменная phi_b здесь является известным истинным курсом ориентира в земной координатной системе G. Здесь, величины (x_b, y_b, a_с, R_c, phi_c), связанные с местоположением ориентира, будут естественно относиться к координатам выбранной точки начала отсчета, например центра тяжести ориентира, но не явно к центру круга.
[0044] Однако, что касается практического применения изобретения, то проще оснастить портовую зону малыми ориентирами (такими, как описанные цилиндры), и тогда процедура по уравнению (5) станет бесполезной, как так определение измеряемого направления (phi_c) малого ориентира 11 будет неточным. Тогда в соответствии с вариантом осуществлением настоящего изобретения для определения местоположения (x_v, y_v) и курса (a_v) машины для перемещения контейнеров объединяют данные наблюдений двух отдельных ориентиров (ориентиров 1 и 2). Как понятно специалистам, за счет наблюдения двух отдельных ориентиров 1 и 2, которые можно расположить далеко друг от друга (дальше, чем насколько практически можно увеличить размер ориентира), можно также значительно повысить точность определения курса и местоположения.
[0045] Если в соответствии с настоящим изобретением ориентиры 1 и 2 видны одновременно в поле зрения одного датчика 9, то можно математически сформировать систему из четырех уравнений с тремя неизвестными переменными.
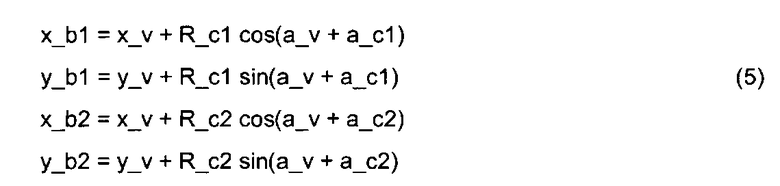
[0046] Местоположение (x_v, y_v) и курс (a_v) машины для перемещения контейнеров однозначно определимы из системы (5) уравнений, когда (х_b1, y_b1 и (x_b2, y_b2) являются известными координатами ориентиров в земной координатной системе G, а расстояния R_c1 и R_c2, а также углы а_с1 и а_с2 являются найденными расстояниями и углами направления ориентиров 1 и 2 в координатной системе L датчика 9. Если в соответствии с другим вариантом осуществления настоящего изобретения ориентиры 1 и 2 являются видимыми одновременно, но в поле зрения двух отдельных датчиков 9, установленных на машине для перемещения контейнеров, например, так, что датчик а видит ориентир 1, а датчик b видит ориентир 2, то ситуация может быть легко возвращена, чтобы соответствовать ситуации уравнения (5), и решена соответствующим образом, так как показания, измеренные датчиком b, могут быть сначала с помощью уравнения (1) преобразованы в xy координатную систему (x_с2, y_с2), а затем с помощью немного измененного уравнения (2) преобразованы в виртуальное показание датчика а следующим образом:

где (ХВ, YB) - это известное местоположение датчика b в координатной системе L датчика a.
[0047] Однако, что касается практического применения изобретения, нельзя предположить, что датчики 9 машины для перемещения контейнеров будут одновременно видеть два ориентира или даже один ориентир непрерывно. Видимость в направлении ориентиров может быть временно закрыта, например, когда другая машина 3 для перемещения контейнеров проезжает за ориентиром или когда из-за ориентира 11 в направлении лазерного луча 13 светит низко опустившееся Солнце. Поэтому на практике зачастую бывает необходимым подкреплять раскрытые выше способы так называемым способом счисления пути.
Счисление пути
[0048] Как известно специалистам, счисление пути (одометрия) является общим названием способов, в которых относительное изменение местоположения транспортного средства измеряется путем суммирования нарастающим итогом отрезков пройденного пути. На фиг.5 показаны координатные системы и переменные, используемые при обнаружении ориентира 11 и определении местоположения транспортного средства 3. Фиг.6 иллюстрирует переменные DX, DY, Dphi, DR, DA, которые используются в счислении пути. Согласно фиг.5 и фиг.6 относительное изменение местоположения транспортного средства может поддерживаться счислением пути, например, по формуле (7):

[0049] Здесь Ds является расстоянием, пройденным транспортным средством 3 за единицу времени (t…t+Dt); phi(t) является направлением движения транспортного средства в момент времени t, a X(t) и Y(t) являются координатами местоположения транспортного средства в момент времени t. Если привязанная к земле система координат выбрана так, что начальное местоположение и начальное направление движения транспортного средства выбираются равными нулю, а пройденное расстояние согласно формуле (7) суммируется итерационно за период Т времени, то изменение местоположения (DX, DY) и изменение направления движения (Dphi) транспортного средства за период Т времени определяются следующим образом:

[0050] Далее это можно преобразовать в систему полярных координат, которая дает расстояние (DR) между начальной и конечными точками, а также угол (DA) направления в конечной точке относительно начального направления phi(0) движения транспортного средства 3:

[0051] Как известно, расстояние Ds, пройденное транспортным средством 3 за единицу времени Dt можно измерить, например, датчиком 18 измерения расстояния, установленным в колесе или трансмиссии транспортного средства 3, например импульсным энкодером, измеряющим вращение колеса. Угол Da, на который повернулось колесо, может быть преобразован в расстояние Ds, пройденное по земле, при условии если известен коэффициент C_odo измерения расстояния, то есть эффективный радиус качения колеса.

[0052] Однако определение точного эффективного радиуса качения колеса не является простой задачей, так как в случае машины 3 для перемещения контейнеров, особенно движущейся на резиновых шинах, радиус качения изменяется, например, когда изменяется нагрузка (например, вес перевозимого контейнера). Способ согласно настоящему изобретению предлагает решение этой проблемы и точный путь исправления ошибки коэффициента измерения эффективного расстояния транспортного средства 3. Ниже мы предполагаем, что предполагаемый коэффициент (C_est) измерения расстояния ошибочен, так что:

где K_gain отличается от значения 1, и в этом случае, как будет понятно специалистам, мы измеряем пройденное расстояние с его удлинением или укорочением. Тогда также будет ошибочным расстояние между начальной и конечной точками движения, рассчитанное по формуле (9), так что:

[0053] Как будет понятно специалистам, ошибка в коэффициенте измерения расстояния не оказывает влияния на определение направления DA конечной точки согласно формуле (9). Далее будет показано, как в способе согласно настоящему изобретению находят неизвестный коэффициент K_gain масштабирования.
[0054] Известно также, что относительное направление phi(t) движения транспортного средства 3 может быть определено, например, с помощью оптоволоконного гироскопа, или ОВГ. В таком случае в качестве навигационной точки транспортного средства выбирается та его точка, в которой направление движения навигационной точки совпадает с направлением движения корпуса транспортного средства. Такое место, например, на транспортных средствах с ведущими передними колесами (таких как автомобиль) находится на заднем мосту. Тогда легко использовать, например, гиродатчик для измерения изменений как направления движения корпуса транспортного средства 3, так и направления движения транспортного средства. Специалистам будет понятно, что система согласно настоящему изобретению может также использовать и другие датчики, измеряющие направление корпуса или направление движения транспортного средства. Что касается изобретения, то обязательно нужно отметить, что от измерения направления не требуется измерения абсолютного направления движения (например, курса по компасу), а будет достаточным лишь относительное измерение изменения направления движения (например, угловой скорости, помноженной на время). Что, естественно, будет понятно специалистам, подходит и датчик, измеряющий абсолютное направление движения, хотя он и не является обязательным для реализации системы согласно настоящему изобретению.
[0055] В соответствии с настоящим изобретением альтернативный способ выполнения счисления пути, то есть определения относительного перемещения (DX, DY), основан на определении местоположения по GPS, на отслеживании и интегрировании фазы несущей волны сигналов GPS (аккумулированный доплеровский диапазон), в частности. Как известно, путем контроля фазы несущей волны L1 сигналов GPS можно точно, даже с точностью до сантиметров, определить относительное перемещение (DX, DY) GPS-антенны 12 без необходимости находить местоположение GPS-антенны. Перемещение (DX, DY), определенное этим методом, также определяется в системе координат, направленной относительно земли (например, в системе координат WGS84), которая дает системе согласно настоящему изобретению дополнительное преимущество, которое, впрочем, не обязательно для работы изобретения. Как известно специалистам, нахождение (дифференциального) местоположения GPS-антенны 12 с соответствующей сантиметровой точностью потребует использования значительно более дорогого двухчастотного GPS-оборудования и измерения двух несущих волн L1, L2. Кроме того, определение абсолютного местоположения способом, называемым RTK, после потери сигнала GPS требует гораздо большего времени (до двух минут). И наоборот, относительное перемещение (DX, DY) GPS-антенны 12 может быть определено в режиме реального времени, незамедлительно после того, как станет видимым необходимое количество спутников.
[0056] Далее будет объяснено, как способ согласно настоящему изобретению осуществляет счисление пути, когда датчики 9 транспортного средства 3 не видят постоянно два ориентира 11,11 одновременно или не видят постоянно даже одного ориентира 11. Предположим, что датчик 9 транспортного средства 3 видит ориентир 1 в момент времени t=0, а второй ориентир - в момент времени t=Т. Расстояние (DR), пройденное между обнаружением ориентиров (t=0…Т), и направление относительно начального направления (DA) транспортного средства, а также записанное изменение направления Dphi транспортного средства были измерены вышеописанным способом счисления пути. Тогда система уравнений по формуле (5) приобретает следующий вид:
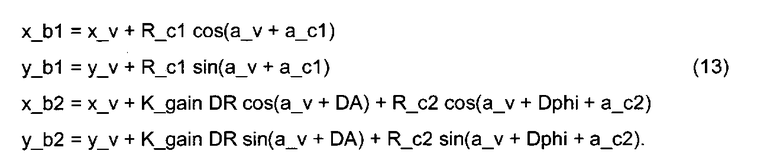
[0057] Теперь, как это будет понятно специалистам, четыре уравнения формулы (13) позволяют найти три неизвестных, а именно начальное местоположение и направление (x_v, y_v, a_v) транспортного средства, а также неизвестную ошибку коэффициента измерения расстояния (K_gain). Как было показано выше, для способа не критично, видит один и тот же датчик 9 ориентиры 1 и 2 в моменты 0 и Т времени или два разных датчика (а и b) видят ориентиры 1 и 2 в моменты времени 0 и Т. Поскольку также известны расстояние перемещения между ориентирами и курс (DR, DA, Dphi), естественно, что известны конечное местоположение и конечное направление транспортного средства.
[0058] Как также будет понятно специалистам, счисление пути может быть впоследствии использовано (согласно формуле (7), например) для поддержания информации о местоположении транспортного средства до обнаружения следующего ориентира 11. Как также будет понятно специалистам, поправочный коэффициент (K_gain) коэффициента счисления пути, найденный по формуле 13, далее может быть использован в счислении пути, причем оценка счисления пути по формуле (7) о местоположении транспортного средства гораздо более точна, чем без раскрытой выше поправки в соответствии с изобретением.
[0059] В системе согласно настоящему изобретению, ориентиры 11 в портовой зоне могут быть расставлены должным образом, например, с интервалом 50 метров, так чтобы транспортные средства 3, такие как машина для перемещения контейнеров, обычно видели постоянно по меньшей мере один ориентир 11, за исключением коротких перерывов, например, когда другая машина 3 для перемещения контейнеров проезжает за ориентиром. Как будет понятно специалистам, когда ориентир 11, как правило, виден дольше, можно либо использовать самое последнее обнаружение для определения значений (R_c2, а_с2) формулы (13), или, альтернативно, усреднить обнаружения одного и того же ориентира для улучшения точности измерения.
[0060] Если ориентиры 11 идентичны друг другу по геометрической форме и по размеру, способу, естественно, потребуется хранить привязки выполненных датчиком 9 обнаружений 14 к конкретным ориентирам. Когда транспортное средство с обоснованной точностью знает свое местоположение и направление (x_v, y_v, a_v), а также известные местоположения (x_b, y_b) ориентиров, тогда специалисту понятно, что задача сравнительно проста, так как тогда можно заранее классифицировать обнаружения 14, сделанные в пределах определенной зоны, связав их с конкретным ориентиром 11. Кроме того, обнаружения 14, которые не соответствуют какому-либо из известных ориентиров (или группы 14 обнаружений, которые по геометрической форме и размеру не соответствуют известным габаритам ориентиров), могут быть отбракованы как ложные отражения сигналов от других объектов в портовой зоне.
[0061] При запуске системы имеется возможность либо отдельно сообщить начальное местоположение и направление (x_v, y_v, a_v) транспортного средства 3 его компьютеру, либо, например, запустить систему с какого-либо известного местоположения. Также имеется возможность использовать отдельную систему определения местоположения, такую как GPS для грубого определения местоположения транспортного средства. Также имеется возможность затем построить комбинированную систему определения местоположения, причем навигация, выполняемая по ориентирам, может быть использована только в тех зонах, где не работает система спутниковой навигации GPS, например. В ситуациях, когда транспортное средство все равно обязательно оснащено лазерными датчиками 9, например, для предотвращения столкновений, экономически выгодным будет комбинированное решение.
[0062] Выполненные датчиком 9 измерения (a, R) преобразуют в координаты (x,y) координатной системы L, привязанной к датчику 9 и транспортному средству 3. Затем, в случае цилиндрического ориентира 11, например, по измеренным точкам (x,y) строят круг и находят его центр (x_с, y_с), в общем случае, являющийся центром тяжести ориентира. Центр тяжести (x_с, y_с) ориентира, в свою очередь, преобразуют назад в данные расстояния и направления (R_c, а_с) в координатной системе L, привязанной к датчику 9. Затем рассчитанные значения используют для расчета местоположения и направления (x_v, y_v, a_v) датчика 9 и транспортного средства 3 в координатной системе G, привязанной к земле, с помощью известного местоположения (x_b, y_b) ориентира 11 в координатной системе G, привязанной к земле.
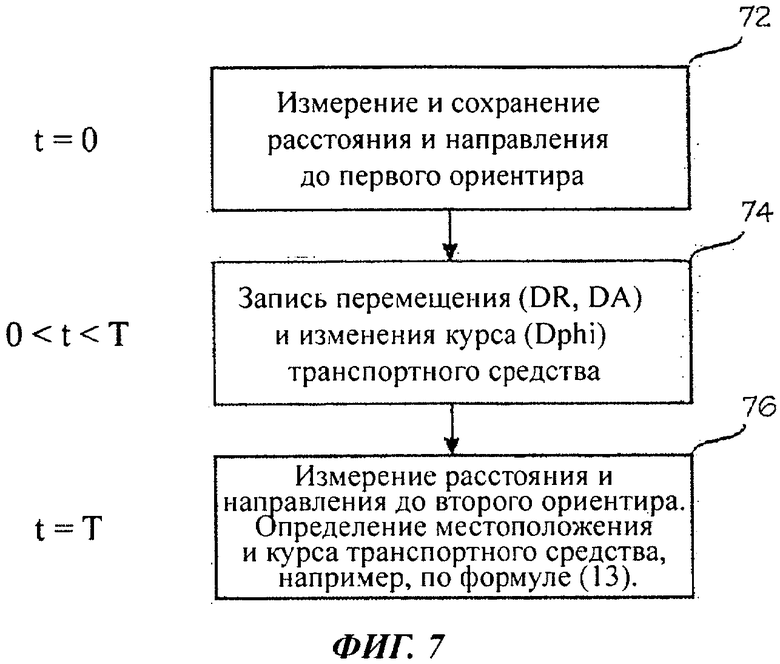
[0063] На фиг.7 и фиг.8 показаны различные методики определения местоположения транспортного средства в ситуации, когда ориентиры могут время от времени исчезать из поля зрения транспортного средства, технология по фиг.7 пригодна для ситуации, когда в определенный момент времени, обозначенный как t=0, обнаруживают один ориентир. В момент времени t=0, на шаге 72, измеряют расстояние и курсовое направление от транспортного средства до первого ориентира. Результаты измерений сохраняют для дальнейшей обработки. В промежутке между моментами времени 0 и Т, на этапе 74, производят запись перемещения (DR, DA) и изменения курса (Dphi) транспортного средства. В момент времени t=T, на этапе 76, измеряют расстояние до второго ориентира и направление на него. После этого можно найти местоположение и курс транспортного средства по формуле (13), например.
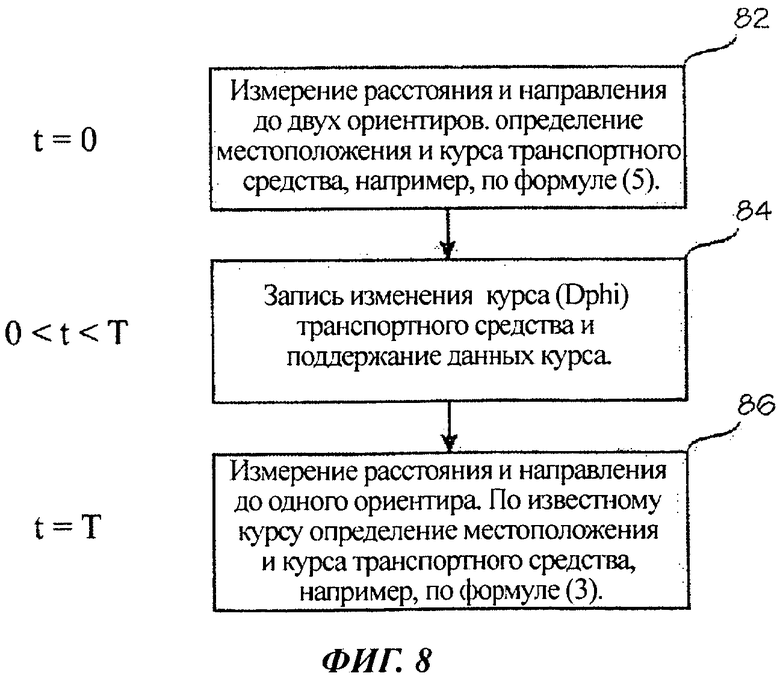
[0064] Способ по фиг.8 подходит для ситуации, когда в определенный момент времени, обозначенный t=0, обнаруживают два ориентира. В момент времени t=0, на шаге 82, измеряют расстояние и направление от транспортного средства до этих двух ориентиров. После этого можно найти местоположение и курс транспортного средства по формуле (5), например. Результаты измерений сохраняют для дальнейшей обработки. В промежутке между моментами времени 0 и Т, на шаге 84, записывают изменения курса (Dphi) транспортного средства и эту информацию поддерживают для дальнейшей обработки, по меньшей мере, пока не будет обнаружен второй ориентир. В момент времени t=T, на шаге 86, измеряют расстояние и направление до одного ориентира. Зная курс, можно найти местоположение транспортного средства по формуле (3), например.
[0065] Специалистам будет понятно, что по мере развития технологии основная идея изобретения может быть реализована многими различными путями. Поэтому изобретение и его осуществления не ограничиваются вышеописанными примерами, но могут варьироваться в пределах объема формулы изобретения.
Изобретение относится к измерительной технике и может найти применение в системах позиционирования транспортных средств. Технический результат - расширение функциональных возможностей. Для определения местоположения (x_v, y_v) транспортного средства (3) в окружающей обстановке, снабженной, по меньшей мере, двумя ориентирами (11, 11′), местоположение (x_b, y_b) которых известно, система содержит, по меньшей мере, один сканирующий датчик (9) расстояния, установленный на транспортном средстве (3) и выполненный с возможностью измерения расстояния (R_c) и направления (a_с) от транспортного средства (3) до, по меньшей мере, двух ориентиров (11, 11′), а также устройство (8) обработки данных, выполненное с возможностью сохранения в своем запоминающем устройстве местоположения (x_b, y_b) указанных, по меньшей мере, двух ориентиров; и определения местоположения (x_v, y_v) транспортного средства на основании, по меньшей мере, местоположения (x_b, y_b) указанных, по меньшей мере, двух ориентиров, а также расстояния (R_c) и направления (ас) от транспортного средства (3) до указанных, по меньшей мере, двух ориентиров (11). 2 н. и 12 з.п. ф-лы, 8 ил.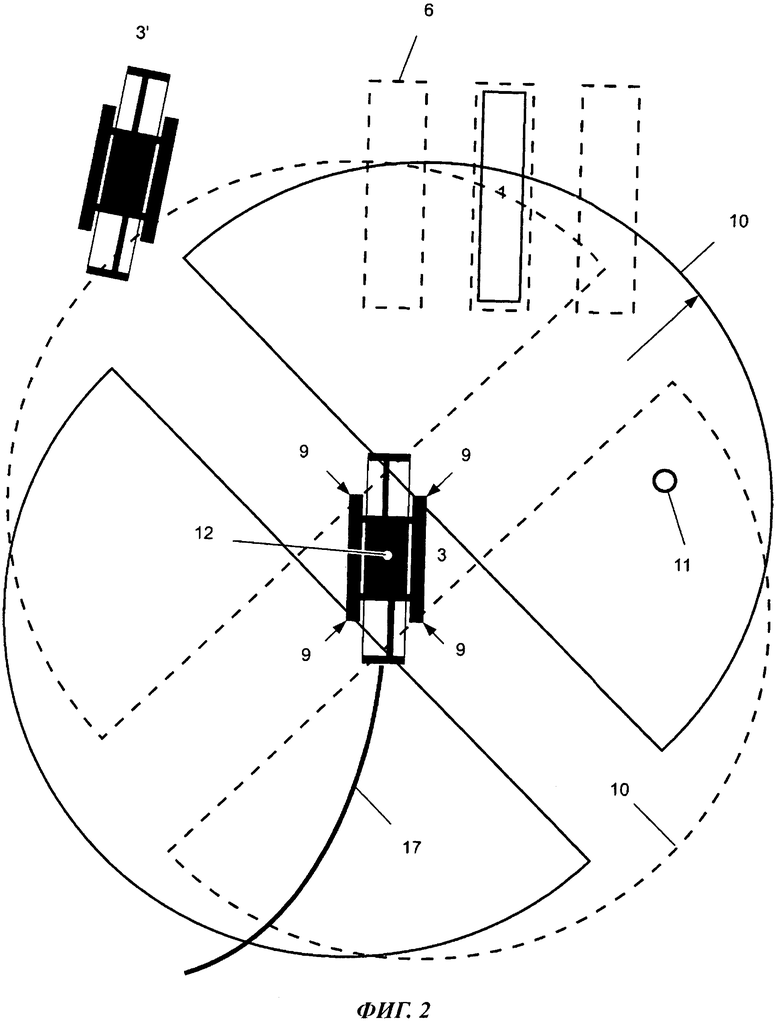
1. Система для определения местоположения (x_v, y_v) транспортного средства (3) в окружающей обстановке, снабженной множеством ориентиров (11, 11′), местоположение (x_b, y_b) которых известно, причем система содержит:
по меньшей мере один сканирующий датчик (9) расстояния, установленный на транспортном средстве (3) и выполненный с возможностью измерения расстояния (R_c) и направления (а_с) от транспортного средства (3) до по меньшей мере двух из множества ориентиров (11, 11′);
устройство обработки данных, выполненное с возможностью:
сохранения в запоминающем устройстве местоположения (x_b, y_b) указанных по меньшей мере двух ориентиров;
определения начального местоположения и начального курса транспортного средства на основании измеренных расстояний (R_c) и направлений (a_с) до указанных по меньшей мере двух ориентиров (82, 72, 76), а также на основании записанного перемещения (DR, DA; DX, DY) и изменения курса (Dphi), если таковые имеются, между моментами времени наблюдения по меньшей мере двух ориентиров;
при этом, если виден только один ориентир, то устройство обработки данных выполнено с возможностью:
записи изменения курса (Dphi) и поддержания данных (84) курса транспортного средства (3);
измерения расстояния (R_c) и направления (a_с) только до одного ориентира;
определения обновленного местоположения на основании по меньшей мере местоположения (x_b, y_b) указанного только одного ориентира, а также расстояния (Rc_c) и направления (a_с) от транспортного средства (3) до указанного только одного ориентира.
2. Система по п.1, дополнительно выполненная с возможностью определения указанного изменения местоположения (DX, DY) транспортного средства (3) с использованием спутниковой навигации.
3. Система по п.1, дополнительно выполненная с возможностью определения указанного изменения местоположения (DX, DY) транспортного средства (3) посредством отслеживания направления движения транспортного средства, а также посредством установленного на транспортном средстве датчика (18) измерения расстояния, калибровочные данные (C_odo) которого основаны на известных данных о местоположении ориентиров (11).
4. Система по любому из пп.1-3, выполненная с возможностью определения местоположения транспортного средства (3) путем использования счисления пути в случае невозможности обнаружения указанного по меньшей мере одного ориентира.
5. Система по любому из пп.1-3, дополнительно выполненная с возможностью определения формы указанного по меньшей мере одного ориентира путем измерения множества направлений и расстояний до ориентира с интервалами времени, достаточно короткими для того, чтобы можно было игнорировать перемещение транспортного средства в процессе измерения множества направлений и расстояний.
6. Система по п.5, в которой указанный по меньшей мере один ориентир (11) является цилиндрическим.
7. Система по любому из пп.1-3 или 6, в которой датчик (9) расстояния является лазерным датчиком.
8. Система по любому из пп.1-3 или 6, выполненная с возможностью замедления или остановки транспортного средства на основании обнаружения датчиком (9) расстояния препятствия в направлении движения транспортного средства.
9. Система по любому из пп.1-3 или 6, выполненная с возможностью управлять транспортным средством (3) автоматически.
10. Система по любому из пп.1-3 или 6, в которой транспортное средство (3) является машиной для перемещения контейнеров.
11. Система по любому из пп.1-3 или 6, выполненная с возможностью определения места (6, 7) разгрузки перевозимого транспортным средством (3) груза (1) путем определения местоположения транспортного средства в момент времени, когда транспортное средство (3) разгружает груз (1).
12. Система по любому из пп.1-3 или 6, выполненная с возможностью идентификации груза (1) на основании места (6, 7), из которого транспортное средство (3) забирает груз (1).
13. Система по любому из пп.1-3 или 6, в которой транспортное средство (3) выполнено с возможностью передвижения без присутствия человека.
14. Способ определения местоположения (x_v, y_v) транспортного средства (3) в окружающей обстановке, снабженной множеством ориентиров (11, 11′), местоположение (x_b, y_b) которых известно, причем способ содержит следующие шаги, выполняемые устройством обработки данных:
сохранение в запоминающем устройстве местоположения (x_b, y_b) указанных по меньшей мере двух ориентиров из указанного множества ориентиров; и
определение начального местоположения и начального курса транспортного средства исходя из измеренных расстояний (R_c) и направлений (a_с) до указанных по меньшей мере двух ориентиров (82, 72, 76), а также из записанного (74) перемещения (DR, DA; DX, DY) и изменения курса (Dphi), если таковые имеются, между моментами времени наблюдения по меньшей мере двух ориентиров;
и если виден только один ориентир:
запись изменения курса (Dphi) и поддержание данных (84) курса транспортного средства (3);
измерение расстояния (R_c) и направления (a_с) только до одного ориентира;
определение обновленного местоположения исходя из по меньшей мере местоположения (x_b, y_b) указанного только одного ориентира, а также расстояния (Rc_c) и направления (a_с) от транспортного средства (3) до указанного только одного ориентира.
| US 6208916 B1, 27.03.2001 | |||
| WO 1997038326 А1, 16.10.1997 | |||
| УСТРОЙСТВО И СПОСОБ ВЫЗОВА МОБИЛЬНОГО РОБОТА | 2005 |
|
RU2289145C2 |
| УСТРОЙСТВО И СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ МОБИЛЬНОГО РОБОТА | 2004 |
|
RU2279343C2 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |

