1. Область техники, к которой относится изобретение
Настоящее изобретение относится к мобильным роботам или, более определенно, к устройству и способу вызова мобильного робота.
2. Уровень техники
В общем случае мобильный робот представляет собой устройство для автоматической уборки поверхности посредством всасывания инородных веществ, например половой пыли, во время своего движения по комнате (например, по жилой комнате) в доме, причем автономно без управления пользователем.
При уборке робот-уборщик определяет расстояние до препятствий, таких как мебель, например офисное оборудование, или стены в убираемом помещении, посредством датчика расстояния и избирательно управляет двигателями для поворота его левого и правого колес в соответствии с определенным расстоянием, изменяя при этом направление своего движения и автоматически очищая требуемую поверхность. При этом робот-уборщик выполняет операцию по очистке во время движения по очищаемой зоне, используя картографическую информацию, сохраняемую во внутреннем блоке памяти.
Робот-уборщик содержит, например, гиродатчик для определения направления его движения, кодирующее устройство для определения дальности перемещения по считыванию количества оборотов колеса робота-уборщика; ультразвуковой датчик для определения расстояния между роботом-уборщиком и объектом; инфракрасный датчик для распознавания препятствия, а также ряд других датчиков.
Однако традиционный робот-уборщик имеет недостатки, обусловленные наличием многочисленных дорогостоящих датчиков, требующихся для точного перемещения вдоль заданного пути при выполнении уборки, из-за чего и внутреннее устройство его усложняется, и растет цена изготовления.
Для разрешения этой трудности и был разработан робот-уборщик, пригодный для выполнения уборки при движении вдоль произвольно заданного пути случайным образом.
Ниже рассмотрено устройство для перемещения робота-уборщика в соответствии со стандартной технологией.
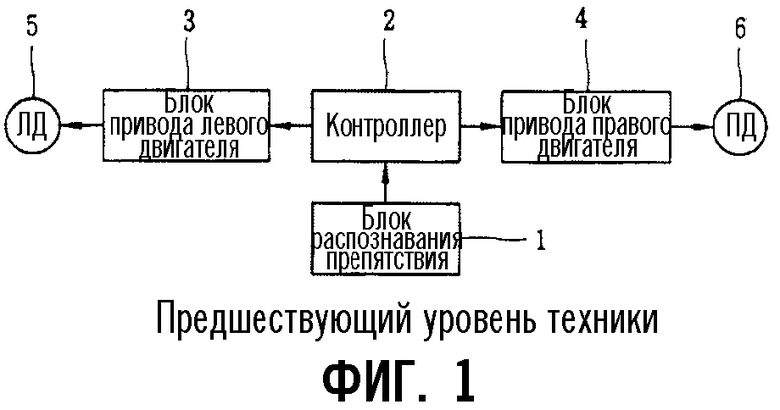
На фиг.1 показана блок-схема устройства перемещения робота-уборщика в соответствии с уровнем техники.
Как видно из фиг.1, устройство перемещения стандартного робота-уборщика включает в себя блок 1 распознавания препятствия, реагирующий на степень воздействия при столкновении движущегося вперед по заданной зоне робота-уборщика с препятствием, в результате чего создается сигнал распознавания препятствия; контроллер для остановки движения робота-уборщика, использующий сигнал распознавания препятствия, сформированный в блоке распознавания препятствия 1, а также определяющий любой произвольный угол и формирующий управляющий сигнал для поворота робота-уборщика в соответствии с этим произвольным углом; блок привода 3 левого двигателя для вращения левого двигателя (ЛД) 5 робота-уборщика, причем со скоростью, соответствующей управляющему сигналу контроллера 2; а также блок 4 привода правого двигателя для вращения правого двигателя (ПД) 6 робота-уборщика, причем со скоростью, соответствующей управляющему сигналу контроллера 2.
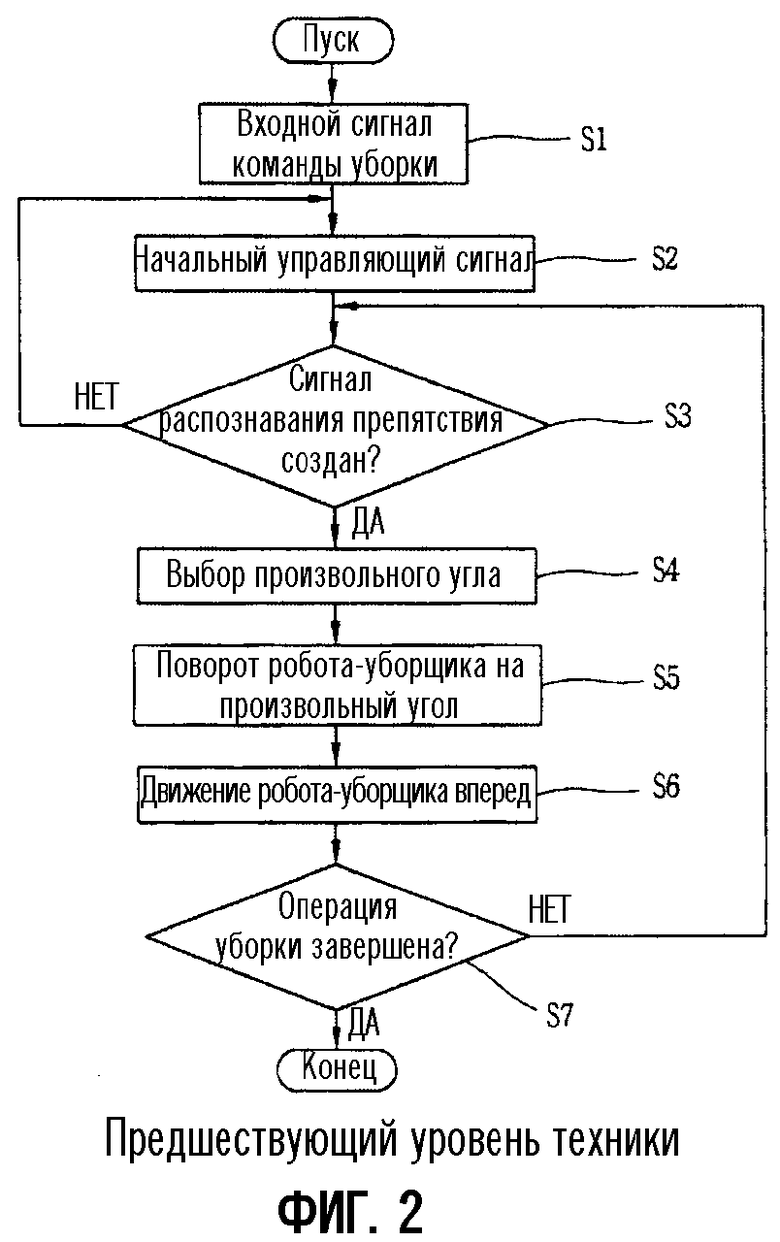
На фиг.2 приведена схема последовательности операций при перемещении робота-уборщика в соответствии с уровнем техники.
Во-первых, когда пользователь подает командный сигнал уборки (этап S1), контроллер 2 вырабатывает управляющий сигнал для получения равных скоростей вращения левого двигателя 5 и правого двигателя 6 так, чтобы робот-уборщик двигался прямо вперед, и одновременно выводит управляющий сигнал на блок 3 привода левого двигателя и на блок 4 привода правого двигателя (этап S2).
Блок 3 привода левого двигателя вращает левый двигатель 5 в соответствии с управляющим сигналом контроллера. В это же время блок 4 привода правого двигателя вращает правый двигатель 6 в соответствии с управляющим сигналом контроллера 2. Таким образом, когда левый 5 и правый 6 двигатели вращаются одновременно, робот-уборщик движется прямо вперед.
Блок распознавания препятствия, реагирующий на степень воздействия при столкновении движущегося вперед по заданной зоне робота-уборщика с препятствием, вырабатывает сигнал распознавания препятствия и подает его на контроллер 2 (этап S3). Если сигнал распознавания препятствия не вырабатывается, то робот-уборщик непрерывно осуществляет операцию уборки.
Контроллер 2 останавливает движение робота-уборщика в соответствии с сигналом распознавания препятствия, определяет требуемый произвольный угол (этап S4), формирует управляющий сигнал для поворота робота-уборщика в соответствии с произвольным углом и затем выводит сформированный управляющий сигнал к блокам 3 и 4 привода левого и правого двигателей.
Блок 3 привода левого двигателя вращает левый двигатель 5 в соответствии с управляющим сигналом контроллера 2, а блок 4 привода правого двигателя вращает правый двигатель 6 в соответствии с управляющим сигналом контроллера. Таким образом, управляя скоростью вращения левого двигателя 5 и скоростью вращения правого двигателя 6 по-разному, направлению движения робота-уборщика можно придать произвольный сектор (этап S5).
Затем, когда робот-уборщик повернется настолько, насколько требует произвольно выбранный сектор, контроллер позволит роботу-уборщику двигаться прямо вперед (этап S6). Когда действие по уборке робота-уборщика завершено, то контроллер заканчивает операцию уборки (этап S7). Если действие по уборке робота-уборщика не завершено, то контроллер позволяет роботу-уборщику повторно осуществлять уборку.
Если пользователь хочет направить робота-уборщика на некоторое специальное место во время его действия по уборке, то пользователь должен остановить работу робота-уборщика и затем снова лично запустить его на это специально выделенное место. Таким образом, проблема со стандартным роботом-уборщиком заключается в том, что пользователь должен лично переносить его в различные зоны, где требуется уборка, или в место его хранения.
Патенты США №5 440 216 и 5 646 494 также раскрывают робота-уборщика.
Раскрытие изобретения
Таким образом, задача настоящего изобретения заключается в создании устройства и способа вызова мобильного робота, такого как робот-уборщик, которые обеспечивали бы его самостоятельное движение на специально обозначенное место, когда пользователь вызывает его с этого места, причем без необходимости личного переноса к выбранному месту, что в конечном счете повышает удобства пользователя.
Для достижения этих и других преимуществ, а также в соответствии с задачей настоящего изобретения, реализованного и в общих чертах описанного здесь, предлагается устройство для вызова мобильного робота, включающее в себя генератор, установленный при удаленном контроллере, генерирующий радиосигнал и инфракрасный сигнал для вызываемого мобильного робота, когда сигнал вызова вводится пользователем; а также контроллер, установленный на мобильном роботе, рассчитывающий направление на удаленный контроллер исходя из местоположения приемника инфракрасных лучей, принимающего инфракрасный сигнал, когда принят радиочастотный сигнал, поворачивающий мобильный робот в рассчитанном направлении и затем направляющий его прямо вперед.
Для достижения вышеозначенной цели также предлагается устройство для вызова мобильного робота, включающее в себя генератор, установленный на удаленном контроллере, получающий сигнал вызова от пользователя и генерирующий радиочастотный сигнал, а также ультразвуковой сигнал для вызова мобильного робота; контроллер, установленный на мобильном роботе, рассчитывающий направление на удаленный контроллер исходя из местоположения приемника ультразвуковых волн, принявшего ультразвуковой сигнал, когда радиосигнал принят, рассчитывающий расстояние между удаленным контроллером и мобильным роботом исходя из времени достижения ультразвуковым сигналом приемника ультразвуковых волн, поворачивающий мобильный робот в рассчитанном направлении и затем направляющий его прямо вперед вплоть до прохождения рассчитанного расстояния.
Для достижения вышеозначенной цели также предлагается устройство для вызова мобильного робота, включающее в себя радиочастотный генератор, установленный на удаленном контроллере и генерирующий радиосигнал для вызова мобильного робота, когда сигнал вызова введен пользователем; генератор инфракрасных лучей, установленный на удаленном контроллере и генерирующий инфракрасный сигнал для указания направления на удаленный контроллер, когда введен сигнал вызова; радиочастотный приемник, установленный на мобильном роботе и принимающий радиосигнал, генерируемый радиочастотным генератором; набор приемников инфракрасных лучей, установленных на мобильном роботе и принимающих инфракрасный сигнал, генерируемый генератором инфракрасных лучей; а также контроллер, установленный на мобильном роботе, распознающий направление на удаленный контроллер исходя из местоположения приемника инфракрасных лучей - одного из набора приемников инфракрасных лучей, принявшего инфракрасный сигнал, когда радиочастотный приемник принимает радиосигнал, а также поворачивающий мобильный робот в определенном направлении и приводящий его в движение прямо вперед.
Для достижения вышеозначенной цели также предлагается устройство для вызова мобильного робота, включающее в себя радиочастотный генератор, установленный на удаленном контроллере и генерирующий радиосигнал для вызова мобильного робота, когда сигнал вызова введен пользователем; генератор ультразвуковых волн, установленный на удаленном контроллере и генерирующий ультразвуковой сигнал указания расстояния между мобильным роботом и удаленным контроллером, когда введен сигнал вызова; радиочастотный приемник, установленный на мобильном роботе и принимающий радиосигнал, генерируемый радиочастотным генератором; набор приемников ультразвуковых волн, установленных на мобильном роботе и принимающих ультразвуковой сигнал, генерируемый генератором ультразвуковых волн; а также контроллер, установленный на мобильном роботе, рассчитывающий направление на удаленный контроллер и расстояние между мобильным роботом и удаленным контроллером исходя из местоположения приемника ультразвуковых волн - одного из набора приемников ультразвуковых волн, принявшего ультразвуковой сигнал, когда радиочастотный приемник принимает радиосигнал, а также перемещающий мобильный робот к удаленному контроллеру исходя из рассчитанных направления и расстояния.
Для достижения вышеозначенной цели также предлагается способ вызова мобильного робота, включающий в себя этап, на котором, если сигнал вызова поступает в удаленный контроллер, то радиосигнал и инфракрасный сигнал для вызова мобильного робота генерируются в удаленном контроллере; этап, на котором, если радиосигнал получен мобильным роботом, то рабочий режим мобильного робота переключается на режим вызова и рассчитывается направление на удаленный контроллер исходя из местоположения приемника инфракрасных лучей - одного из набора приемников инфракрасных лучей, который принял инфракрасный сигнал, установленных на мобильном роботе; а также этап, на котором мобильный робот поворачивается в рассчитанном направлении и затем для мобильного робота допускается движение прямо вперед.
Для достижения вышеозначенной цели также предлагается способ вызова мобильного робота, включающий в себя этап, на котором, если сигнал вызова поступает в удаленный контроллер, то радиосигнал и ультразвуковой сигнал для вызова мобильного робота одновременно генерируются в удаленном контроллере; этап, на котором, если радиосигнал получен радиочастотным приемником мобильного робота, то рабочий режим мобильного робота переключается на режим вызова и тогда направление на удаленный контроллер рассчитывается исходя из местоположения приемника ультразвуковых волн - одного из набора приемников ультразвуковых волн, установленных на мобильном роботе, который принял ультразвуковой сигнал; этап, на котором расстояние между удаленным контроллером и мобильным роботом рассчитывается исходя из времени достижения ультразвуковым сигналом приемника ультразвуковых волн; этап, на котором мобильный робот поворачивается в рассчитанном направлении; а также этап, на котором для мобильного робота допускается движение прямо вперед вплоть до прохождения рассчитанного расстояния.
Вышеприведенные и другие задачи, особенности, аспекты и преимущества настоящего изобретения станут более очевидны из приведенного ниже детального описания настоящего изобретения, которое необходимо рассматривать в комбинации с сопровождающими чертежами.
Краткое описание чертежей
Сопровождающие чертежи приведены для дальнейшего понимания принципов изобретения и представляют собой часть его описания, иллюстрируя также и реализацию изобретения.
На чертежах представлено:
фиг.1 изображает блок-схему устройства для перемещения робота-уборщика в соответствии со стандартной технологией;
фиг.2 изображает схему последовательности операций в способе перемещения робота-уборщика в соответствии со стандартной технологией;
фиг.3 изображает блок-схему устройства для вызова мобильного робота в соответствии с первым вариантом реализации настоящего изобретения;
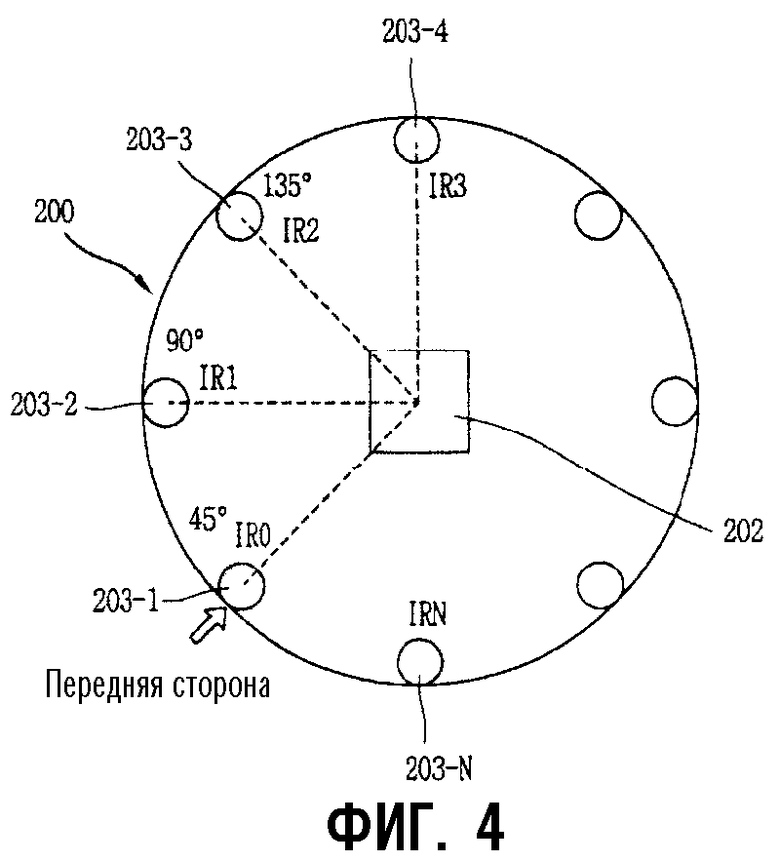
фиг.4 изображает схематический вид набора приемников инфракрасных лучей, установленных на мобильном роботе в соответствии с первым вариантом реализации настоящего изобретения;
фиг.5 изображает схематический вид процесса передачи радиосигнала и инфракрасного сигнала от удаленного контроллера к мобильному роботу в соответствии с первым вариантом реализации настоящего изобретения;
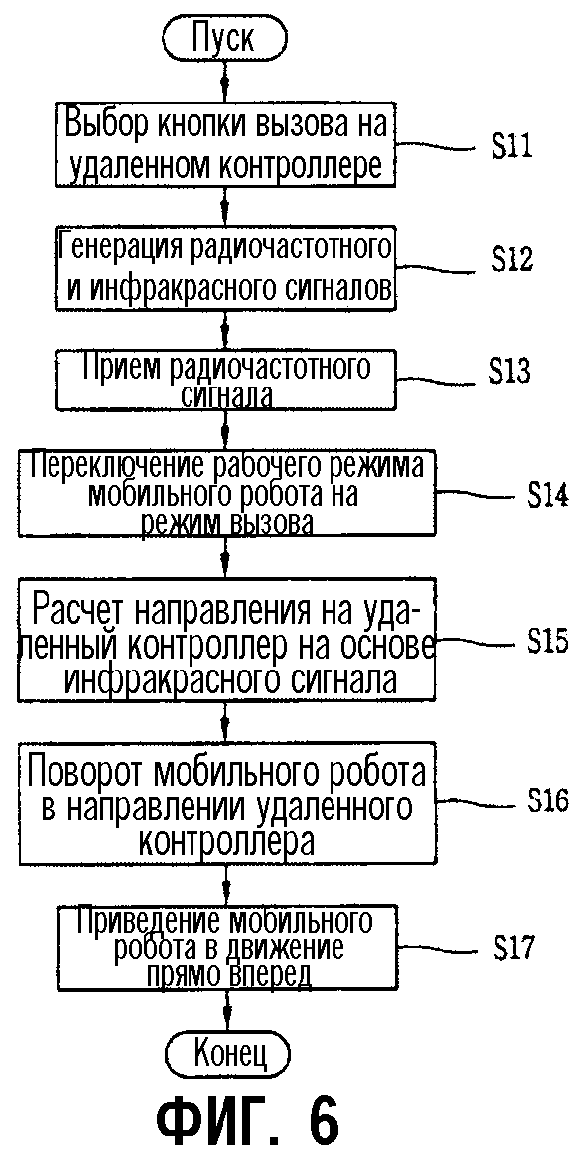
фиг.6 изображает схему последовательности операций в способе вызова мобильного робота в соответствии с первым вариантом реализации настоящего изобретения;
фиг.7 изображает примерный вид процесса поворота мобильного робота в направлении удаленного контроллера, после которого для мобильного робота допускается движение прямо вперед в соответствии с настоящим изобретением;
фиг.8 изображает блок-схему устройства для вызова мобильного робота в соответствии со вторым вариантом реализации настоящего изобретения;
фиг.9 изображает схему последовательности операций в способе вызова мобильного робота в соответствии со вторым вариантом реализации настоящего изобретения;
Осуществление изобретения
Ниже, со ссылками на сопровождающие чертежи описывается устройство и способ вызова мобильного робота, пригодные для управления мобильным роботом, таким как робот-уборщик, который самостоятельно способен перемещаться к специально обозначенному месту при вызове его пользователем с этого места так, что пользователю не требуется лично переносить его на выбранное место, что увеличивает удобство пользователя и соответствует предпочтительным реализациям настоящего изобретения.
На фиг.3 показана блок-схема устройства для вызова мобильного робота в соответствии с первой реализацией настоящего изобретения.
Из фиг.3 видно, что устройство для вызова мобильного робота в соответствии с первым вариантом реализации настоящего изобретения включает в себя радиочастотный генератор 101, установленный на удаленном контроллере 100 и генерирующий радиосигнал для вызова мобильного робота 200, когда сигнал вызова введен пользователем; генератор инфракрасных лучей 102, установленный на удаленном контроллере 100 и генерирующий инфракрасный сигнал для указания направления на удаленный контроллер 100, когда сигнал вызова введен; радиочастотный приемник 201, установленный на мобильном роботе 200 и принимающий радиосигнал, генерируемый радиочастотным генератором 101; набор приемников инфракрасных лучей 203-1˜203-N, установленных на мобильном роботе 200 и принимающих инфракрасный сигнал, генерируемый генератором инфракрасных лучей 102; а также контроллер 202, установленный на мобильном роботе 200, распознающий направление на удаленный контроллер 100 исходя из местоположения принявшего инфракрасный сигнал приемника инфракрасных лучей - одного из набора приемников инфракрасных лучей 203-1˜203-N, когда радиочастотный приемник 201 принимает радиосигнал, приводящий в движение мобильный робот 200 в направлении на удаленный контроллер 100.
Расположение набора инфракрасных приемников 203-1˜203-N, установленных на мобильном роботе, описано ниже в связи с фиг.4.
На фиг.4 показан схематический вид набора инфракрасных приемников, установленных на мобильном роботе в соответствии с первым вариантом реализации настоящего изобретения.
Как видно из фиг.4, набор инфракрасных приемников 203-1˜203-N предпочтительно устанавливается на некотором расстоянии от внешней периферической поверхности мобильного робота 200, образуя переднюю сторону мобильного робота 200, причем первый приемник инфракрасных лучей IR1 предпочтительно устанавливается на передней стороне мобильного робота 200 так, чтобы зафиксировать опорный угол (например, 0°).
На фиг.5 схематически показан процесс передачи радиосигнала и инфракрасного сигнала от удаленного контроллера к мобильному роботу в соответствии с первым вариантом реализации настоящего изобретения.
Как видно из фиг.5, пользователь направляет удаленный контроллер 100 на мобильный робот 200 и нажимает кнопку вызова 103, установленную на удаленном контроллере 100. Затем радиосигнал и инфракрасный сигнал передаются в направлении мобильного робота 200. В то же время, когда направление на удаленный контроллер 100 совпадает с направлением мобильного робота 200, то инфракрасный сигнал принимается четвертым приемником инфракрасных лучей IR4.
Работа устройства вызова мобильного робота в соответствии с настоящим изобретением будет описана ниже в связи с фиг.4 и 6.
На фиг.6 показана схема последовательности операций в способе вызова мобильного робота в соответствии с первым вариантом реализации настоящего изобретения.
Во-первых, когда пользователь выбирает кнопку вызова 103 на удаленном контроллере 100 (этап S11), то радиочастотный генератор 101, установленный на удаленном контроллере 100, генерирует радиочастотный сигнал для вызова мобильного робота 200 и передает этот радиосигнал радиочастотному приемнику 201, установленному на мобильном роботе 200.
Когда пользователь выбирает кнопку вызова 103 удаленного контроллера 100 (этап S11), то генератор инфракрасных лучей 102, установленный на удаленном контроллере 100, генерирует инфракрасный сигнал, информируя о направлении на него, и передает этот инфракрасный сигнал в направлении мобильного робота 200 (этап S12). При этом направление на генератор инфракрасных лучей 102 означает и направление на удаленный контроллер 100.
Затем радиочастотный приемник 201, установленный на мобильном роботе 200, принимает радиочастотный сигнал, передаваемый генератором 101. В это же время приемник инфракрасных лучей, расположенный по тому же направлению, что и генератор инфракрасных лучей 102 (например, четвертый приемник инфракрасных лучей IR3) из набора приемников инфракрасных лучей 203-1˜203-N, установленный на мобильном роботе 200, принимает инфракрасный сигнал, передаваемый генератором инфракрасных лучей 102.
И затем, когда радиочастотный приемник 201 принимает радиочастотный сигнал, контроллер 202 переключает рабочий режим мобильного робота 200 на режим вызова (этап S14). Кроме того, контроллер 202 рассчитывает направление на удаленный контроллер 100 исходя из местоположения приемника инфракрасных лучей (например, четвертого приемника инфракрасных лучей IR3), получившего инфракрасный сигнал, - один из приемников набора 203-1˜203-N (этап S15). При этом контроллер 202 может содержать блок хранения (не показан) для сохранения заранее заданных позиционных номеров для различения местоположения в наборе приемников инфракрасных лучей 203-1˜203-N и определять местоположение приемника инфракрасных лучей, получившего инфракрасный сигнал исходя из заданного заранее номера его позиции.
Например, если четвертый приемник инфракрасных лучей IR3, установленный в направлении 135° относительно первого приемника инфракрасных лучей IR0, установленного на передней стороне мобильного робота 200, принимает инфракрасный сигнал, то контроллер 202 может распознать, что удаленный контроллер 100 размещен в направлении 45° относительно передней стороны мобильного робота 200, поскольку угол между первым приемником инфракрасных лучей IR0 и четвертым приемником инфракрасных лучей IR3 составляет 135°. При этом для расчета направления удаленного контроллера 100 позиционный номер первого приемника инфракрасных лучей есть 0 и предпочтительно позиционный номер следующего приемника инфракрасных лучей устанавливается как 1, позиционный номер третьего приемника инфракрасных лучей устанавливается как 2, позиционный номер четвертого приемника инфракрасных лучей устанавливается как 3, а позиционный номер N-го приемника инфракрасных лучей устанавливается как N.
Соответственно, контроллер 202 рассчитывает направление на удаленный контроллер 100 исходя из местоположения приемника инфракрасных лучей, получившего инфракрасный сигнал, и именно четвертый приемник инфракрасных лучей IR3 поворачивает мобильный робот 200 в направлении удаленного контроллера 100 (например, в секторе 135°) (этап S16) и затем позволяет мобильному роботу двигаться прямо вперед (шаг S17).
Контроллер 202, установленный на мобильном роботе 200, рассчитывает направление (y) на удаленный контроллер 100 по уравнению (1):

где ′n′ есть полное число приемников инфракрасных лучей, установленных на мобильном роботе 200, а ′x′ - позиционный номер приемника инфракрасных лучей, получившего инфракрасный сигнал, генерируемый генератором инфракрасных лучей 102.
Например, если ′n′ равно 8, а ′x′ есть 0, то направление у на удаленный контроллер 100 составляет 0°, а если ′n′ равно 8, а ′x′ есть 3, то направление (у) на удаленный контроллер 100 составляет 135°. Значение ′x′=0 означает, что приемник инфракрасных лучей, получивший инфракрасный сигнал, есть первый приемник инфракрасных лучей IR0, установленный на передней стороне мобильного робота 200, а ′x′=3 означает, что приемник инфракрасных лучей, получивший инфракрасный сигнал, есть четвертый приемник инфракрасных лучей IR3, установленный в направлении 135° относительно первого приемника инфракрасных лучей.
Вместе с тем, если инфракрасный сигнал получен двумя или более приемниками инфракрасных лучей, то предпочтительно вычисляется средняя точка как направление на удаленный контроллер 100. Например, когда приемники инфракрасных лучей IR2˜IR4 с позиционными номерами от 3 до 5 одновременно получают инфракрасный сигнал, то среднее значение 4 предпочтительно подставляется как значение ′x′, а если приемники инфракрасных лучей с позиционными номерами от 5 до 8 одновременно получают инфракрасный сигнал, то среднее значение 6 и 7 предпочтительно подставляется как значение ′x′.
Процесс поворота мобильного робота 200 в направлении на удаленный контроллер 100 и приведение мобильного робота 200 в движение прямо вперед в направлении на удаленный контроллер 100 описывается ниже в связи с фиг.7.
На фиг.7 приведен типичный вид процесса поворота мобильного робота в направлении на удаленный контроллер, позволяющего затем мобильному роботу двигаться прямо вперед в соответствии с настоящим изобретением.
Как показано на фиг.7, допуская установку набора приемников инфракрасных лучей 203-1˜203-N на некоторых расстояниях от внешней периферической поверхности мобильного робота, угол между соседними приемниками инфракрасных лучей (например, между первым и вторым приемниками инфракрасных лучей IR0 и IR1) составляет 45° и приемник инфракрасных лучей, получивший инфракрасный сигнал, есть четвертый приемник инфракрасных лучей IR3 из набора приемников инфракрасных лучей 203-1˜203-N, контроллер 202 поворачивает мобильный робот 200 вплоть до 135° и затем приводит мобильный робот 200 в движение прямо вперед.
Другими словами, поскольку угол между первым и четвертым приемниками инфракрасных лучей IR0 и IR3 составляет 135° при повороте мобильного робота 200 на 135°, передняя сторона мобильного робота оказывается обращенной к удаленному контроллеру 100. Таким образом, когда мобильный робот 200 поворачивается на 135° и затем приводится в движение прямо вперед, он должен достигать точки нахождения удаленного контроллера 100.
Когда мобильный робот 200 достигает места, желаемого пользователем, то для остановки мобильного робота 200 пользователь выключает кнопку вызова 103. Например, когда пользователь включает кнопку вызова 103, контроллер 202 двигает мобильный робот 200 в направлении удаленного контроллера, а когда пользователь выключает кнопку вызова 103, то контроллер останавливает мобильный робот 200. Соответственно, пока пользователь удерживает нажатой кнопку вызова 103, установленную на удаленном контроллере 100, мобильный робот следует за пользователем. В этом случае направление на удаленный контроллер 100 предпочтительно совпадает с мобильным роботом 200.
Так же, как и в предшествующем уровне техники, мобильный робот 200 может быть легко приведен в движение и повернут управлением левого и правого двигателей мобильного робота 200, поэтому детальное описание этого опущено.
Устройство для вызова мобильного робота способно автоматически останавливать мобильный робот 200, когда он достигает удаленного контролера 100 посредством вычисления расстояния между удаленным контроллером 100 и мобильным роботом 200, а также и направления на удаленный контроллер 100, используя генератор ультразвуковых волн и приемники ультразвуковых волн вместо генератора инфракрасных лучей 102 и набора приемников инфракрасных лучей 203-1˜203-N.
На фиг.8 показана блок-схема устройства для вызова мобильного робота в соответствии со второй реализацией настоящего изобретения.
Как видно из фиг.8, устройство для вызова мобильного робота в соответствии с второй реализацией настоящего изобретения включает в себя радиочастотный генератор 301, установленный на удаленном контроллере 300, генерирующий радиочастотный сигнал для вызова мобильного робота 400, когда сигнал вызова подается пользователем; генератор ультразвуковых волн 302, установленный на удаленном контроллере 300, генерирующий ультразвуковой сигнал для указания расстояния между мобильным роботом 400 и удаленным контроллером 300, когда сигнал вызова подан; радиочастотный приемник 401, установленный на мобильном роботе 400 и принимающий радиочастотный сигнал, генерируемый радиочастотным генератором 301; набор приемников ультразвуковых волн 403-1˜403-N, установленных на мобильном роботе 400, принимающих ультразвуковой сигнал, генерируемый генератором ультразвуковых волн 302; а также контроллер 402, установленный на мобильном роботе 400, распознающий направление на удаленный контроллер 300 исходя из местоположения приемника ультразвуковых волн, принявшего ультразвуковой сигнал, - одного из набора приемников ультразвуковых волн 403-1˜403-N, когда радиочастотный сигнал принят радиочастотным приемником 401, вычисляющий расстояние между удаленным контроллером 300 и мобильным роботом 400 исходя из времени приема ультразвукового сигнала приемником ультразвуковых волн и двигающий мобильный робот 400 к удаленному контроллеру 300 исходя из рассчитанных направления и расстояния.
При этом предпочтительно, чтобы генератор ультразвуковых волн 302 и набор приемников ультразвуковых волн 403-1˜403-N были установлены на мобильном роботе 400 таким же образом, что и генератор инфракрасных лучей 102 и набор приемников инфракрасных лучей 203-1˜203-N, как это показано на фиг.4, 5 и 7.
Работа устройства для вызова мобильного робота в соответствии со вторым вариантом реализации настоящего изобретения описывается ниже в связи с фиг.9.
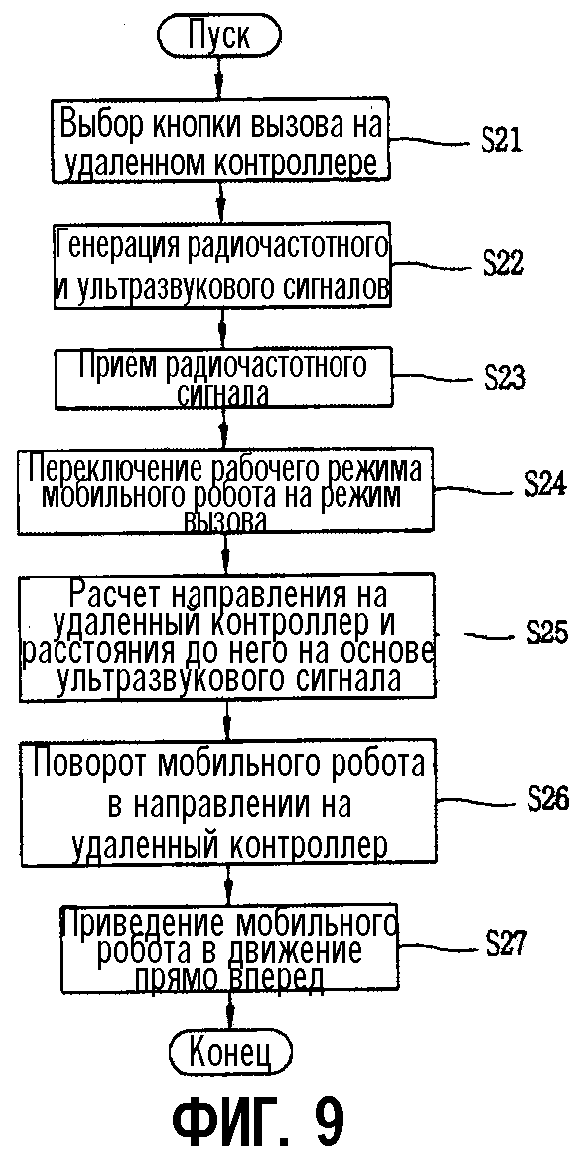
На фиг.9 приведена блок-схема последовательности операций в способе вызова мобильного робота в соответствии со вторым вариантом реализации настоящего изобретения.
Во-первых, когда пользователь выбирает кнопку вызова на удаленном контроллере 300 (этап S21), то радиочастотный генератор 301, установленный на удаленном контроллере 300, генерирует радиочастотный сигнал для вызова мобильного робота 400 и передает генерируемый радиочастотный сигнал к радиочастотному приемнику 401 мобильного робота 400 (этап S22).
Когда пользователь выбирает кнопку вызова на удаленном контроллере 300 (этап S21), то генератор ультразвуковых волн 302 генерирует ультразвуковой сигнал для информации о направлении на удаленный контроллер 300 и о расстоянии между удаленным контроллером 300 и мобильным роботом 400 и передает генерируемый ультразвуковой сигнал в направлении мобильного робота 400 (этап S22).
Радиочастотный приемник 401, установленный на мобильном роботе 400, принимает радиочастотный сигнал, передаваемый от радиочастотного генератора 301 (этап S23). В то же время ультразвуковой сигнал, генерируемый генератором 302 ультразвуковых волн, принимается несколькими приемниками из набора приемников ультразвуковых волн 403-1˜403-N.
Когда радиочастотный сигнал принят радиочастотным приемником 401, то контроллер 402 переключает рабочий режим мобильного робота 400 на режим вызова (этап 324). Кроме того, контроллер 402 вычисляет направление на удаленный контроллер 300 исходя из местоположения приемника ультразвуковых волн, принявшего ультразвуковой сигнал. В то же время контроллер 402 определяет время, когда ультразвуковой сигнал достиг приемника ультразвуковых волн, и затем рассчитывает расстояние между мобильным роботом 400 и удаленным контроллером 300 исходя из определенного времени (этап S25).
После этого контролер 402 поворачивает мобильный робот 400 в рассчитанном направлении (в направлении удаленного контроллера) (этап S26) и затем приводит робот 400 в движение прямо вперед до прохождения им рассчитанного расстояния. Точнее, контролер 402 поворачивает мобильный робот 400 в рассчитанном направлении (этап S26) и затем приводит робот 400 в движение прямо вперед до прохождения им рассчитанного расстояния (этап S27), управляя левым и правым двигателями мобильного робота 400. При этом контроллер 402 может содержать блок хранения (не показан) для сохранения заранее заданного позиционного номера для различения набора приемников 403-1˜403-N ультразвуковых волн и определяет местоположение приемника ультразвуковых волн, принявшего ультразвуковой сигнал исходя из позиционного номера приемника ультразвуковых волн.
Процедура вычисления направления на удаленный контроллер 300 такая же, что и в первом варианте реализации настоящего изобретения, поэтому детальное описание этого опущено.
Ниже подробно описывается процедура вычисления расстояния между удаленным контроллером 300 и мобильным роботом 400 исходя из времени достижения ультразвуковым сигналом приемника ультразвуковых волн.
Прежде всего контролер 402 определяет время достижения ультразвуковым сигналом одного или нескольких приемников ультразвуковых волн после его генерации генератором ультразвуковых волн 302 на удаленном контроллере 300 исходя из момента генерации этого опорного сигнала, а также вычисляет расстояние между мобильным роботом 400 и удаленным контроллером 300 исходя из определенного времени.
Например, когда один приемник ультразвуковых волн (например, 403-1) принимает ультразвуковой сигнал, то контроллер 402 получает расстояние между приемником ультразвуковых волн (например, 403-1), принявшим ультразвуковой сигнал, и удаленным контроллером 300 исходя из времени достижения ультразвуковым сигналом приемника ультразвуковых волн и добавляет половину диаметра мобильного робота 400 к полученному значению расстояния, тем самым точно рассчитывая действующее расстояние между мобильным роботом 400 и удаленным контроллером 300.
Если ультразвуковой сигнал принят двумя или несколькими приемниками ультразвуковых волн, то контроллер 402 вычисляет расстояние между каждым приемником ультразвуковых волн и удаленным контроллером 300 исходя из времени достижения ультразвуковым сигналом двух или нескольких приемников ультразвуковых волн, а затем рассчитывает действующее расстояние между мобильным роботом 400 и удаленным контроллером 300 с помощью тригонометрических измерений для каждого рассчитанного значения расстояния. Расстояние между мобильным роботом 400 и удаленным контроллером 300 может быть рассчитано согласно следующему уравнению:

где 340 [м/с] - скорость звука, Т1 - время приема ультразвукового сигнала, а Т2 - время генерации ультразвукового сигнала после приема радиочастотного сигнала.
Устройство вызова мобильного робота может быть применено и для различных подвижных аппаратов так же, как и для мобильного робота.
Как следует из настоящего описания, устройство и способ вызова мобильного робота в соответствии с настоящим изобретением имеют много преимуществ.
Например, если пользователь вызывает мобильный робот со специально обозначенного места, то мобильный робот может двигаться самостоятельно на это место, что повышает удобства пользователя. Например, при перемещении мобильного робота, такого как робот-уборщик, на выбранное место (убираемое пространство или место хранения мобильного робота) посредством удаленного контроллера пользователь не должен беспокоиться о том, чтобы подобрать и перенести мобильный робот на это место.
Поскольку настоящее изобретение может быть реализовано в различных вариантах без отклонений от существа и ухудшения важных его характеристик, то ясно, что описанные выше варианты реализации не ограничиваются строго приведенными деталями за исключением тех случаев, когда это оговаривается особо, и могут быть расширены в пределах существа приложенных формул, а потому все изменения и модификации, не выходящие за рамки формул или равносильные этим формулам, должны рассматриваться в рамках приложенных формул.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ НАПРАВЛЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2006 |
|
RU2323465C1 |
| СИСТЕМА РОБОТА, СПОСОБНАЯ ОПРЕДЕЛИТЬ ОБЛАСТЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2321487C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| ПОДВИЖНОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1991 |
|
RU2134908C1 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| ДВИЖУЩИЙСЯ ПРЕДМЕТ, СПОСОБНЫЙ РАСПОЗНАВАТЬ ИЗОБРАЖЕНИЕ, И СИСТЕМА НАВЕДЕНИЯ ДВИЖУЩЕГОСЯ ПРЕДМЕТА, ОСНАЩЕННАЯ ТАКОВЫМ | 2006 |
|
RU2321879C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОПРОФИЛЬНОГО ОБЪЕКТА РАДИОЧАСТОТНЫМ ДАТЧИКОМ И РАДИОЧАСТОТНЫЙ ДАТЧИК | 2019 |
|
RU2748145C1 |
| РОБОТ-УБОРЩИК С ФУНКЦИЕЙ ДЕЗИНФЕКЦИИ ПОЛА | 2004 |
|
RU2272557C2 |
| РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ТАКОВЫМ | 2013 |
|
RU2540058C2 |
| ДОМАШНЯЯ СЕТЕВАЯ СИСТЕМА, ИСПОЛЬЗУЮЩАЯ САМОДВИЖУЩИЙСЯ РОБОТ (ВАРИАНТЫ) | 2006 |
|
RU2312579C2 |



Изобретение относится к автономным уборочным роботам, более определенно к управлению автономным уборочным роботом. Технический результат заключается в возможности направления автономного уборочного робота в определенное место во время процесса уборки. Для этого с нажатием кнопки вызов на пульте управления в сторону автономного робота одновременно излучаются радиочастотный и инфракрасный сигналы, мобильный робот принимает эти сигналы и расчитывает направление на пульт исходя из местоположения приемника инфракрасных лучей во время приема радиочастотного сигнала, затем мобильный робот двигается в рассчитанном направлении. В другом варианте осуществления изобретения с удаленного пульта излучаются одновременно ультразвуковой и радиочастотный сигналы, а мобильный робот рассчитывает не только направление на удаленный пульт, но и расстояние до него по времени между приемом радиочастотного и ультразвукового сигналов и двигается в рассчитанном направлении на рассчитанное расстояние. 6 н. и 12 з.п. ф-лы, 9 ил.
генератор, установленный на удаленном контроллере и генерирующий радиочастотный сигнал и инфракрасный сигнал для вызова мобильного робота, когда сигнал вызова введен пользователем; и
контроллер, установленный на мобильном роботе, рассчитывающий направление на удаленный контроллер исходя из местоположения приемника инфракрасных волн, принимающего инфракрасный сигнал, когда радиочастотный сигнал принят, поворачивающий мобильный робот в рассчитанном направлении и затем приводящий мобильный робот в движение прямо вперед.
генератор, установленный на удаленном контроллере, получающий сигнал вызова от пользователя и генерирующий радиочастотный сигнал и ультразвуковой сигнал для вызова мобильного робота; и
контроллер, установленный на мобильном роботе, рассчитывающий направление на удаленный контроллер исходя из местоположения ультразвукового приемника, принимающего ультразвуковой сигнал, когда радиочастотный сигнал принят, рассчитывающий расстояние между удаленным контроллером и мобильным роботом исходя из времени, когда ультразвуковой сигнал достигает ультразвукового приемника, поворачивающий мобильный робот в рассчитанном направлении и затем приводящий мобильный робот в движение прямо вперед до прохождения им рассчитанного расстояния.
радиочастотный генератор, установленный на удаленном контроллере и генерирующий радиочастотный сигнал для вызова мобильного робота, когда сигнал вызова введен пользователем;
генератор инфракрасных лучей, установленный на удаленном контроллере и генерирующий инфракрасный сигнал для указания направления на удаленный контроллер, когда сигнал вызова введен;
радиочастотный приемник, установленный на мобильном роботе и принимающий радиочастотный сигнал, генерируемый радиочастотным генератором;
набор приемников инфракрасных лучей, установленных на мобильном роботе и принимающих инфракрасный сигнал, генерируемый генератором инфракрасных лучей; а также
контроллер, установленный на мобильном роботе, распознающий направление на удаленный контроллер исходя из местоположения приемника инфракрасных лучей, получившего инфракрасный сигнал - одного из набора приемников инфракрасных лучей, когда радиочастотный приемник принимает радиочастотный сигнал, поворачивающий мобильный робот в распознанном направлении и приводящий его в движение прямо вперед.
y=2(π/n)·x,
где n есть полное число в наборе приемников инфракрасных лучей, установленных на мобильном роботе, а x - позиционный номер приемника инфракрасных лучей, получившего инфракрасный сигнал, генерируемый генератором инфракрасных лучей.
этап, на котором если сигнал вызова поступает в удаленный контроллер, то радиочастотный сигнал и инфракрасный сигнал для вызова мобильного робота генерируются в удаленном контроллере;
этап, на котором если радиочастотный сигнал принят мобильным роботом, то рабочий режим мобильного робота переключается на режим вызова, и направление на удаленный контроллер рассчитывается исходя из местоположения приемника инфракрасных лучей, принявшего инфракрасный сигнал - одного из набора приемников инфракрасных лучей, установленных на мобильном роботе; и
этап, на котором мобильный робот поворачивается в рассчитанном направлении, и затем мобильному роботу разрешено двигаться прямо вперед.
y=2(π/n)·х,
где n есть полное число в наборе приемников инфракрасных лучей, установленных на мобильном роботе, а x - позиционный номер приемника инфракрасных лучей, принявшего инфракрасный сигнал.
радиочастотный генератор, установленный на удаленном контроллере и генерирующий радиочастотный сигнал для вызова мобильного робота, когда сигнал вызова введем пользователем;
генератор ультразвуковых волн, установленный на удаленном контроллере и генерирующий ультразвуковой сигнал для указания расстояния между мобильным роботом и удаленным контроллером, когда сигнал вызова введен;
радиочастотный приемник, установленный на мобильном роботе и принимающий радиочастотный сигнал, генерируемый радиочастотным генератором;
набор приемников ультразвуковых волн, установленных на мобильном роботе и принимающих ультразвуковой сигнал, генерируемый генератором ультразвуковых волн; и
контроллер, установленный на мобильном роботе, рассчитывающий направление на удаленный контроллер и расстояние между мобильным роботом и удаленным контроллером исходя из местоположения приемника ультразвуковых волн, принявшего ультразвуковой сигнал - одного из набора приемников ультразвуковых волн, когда радиочастотный приемник принимает радиочастотный сигнал, перемещающий мобильный робот к удаленному контроллеру исходя из рассчитанных направления и расстояния.
S=340[м/с]·(T1-T2),
где 340 [м/с] - скорость звука, Т1 - время приема ультразвукового сигнала, а Т2 - время генерации ультразвукового сигнала после приема радиочастотного сигнала.
этап, на котором если сигнал вызова поступает в удаленный контроллер, то радиочастотный сигнал и ультразвуковой сигнал для вызова мобильного робота одновременно генерируются в удаленном контроллере;
этап, на котором если радиочастотный сигнал принят радиочастотным приемником мобильного робота, то рабочий режим мобильного робота изменяется на режим вызова, и направление на удаленный контроллер рассчитывается исходя из местоположения приемника ультразвуковых волн - одного из набора приемников ультразвуковых волн, установленных на мобильном роботе, принявшего ультразвуковой сигнал;
этап, на котором расстояние между удаленным контроллером и мобильным роботом рассчитывается исходя из времени достижения ультразвуковым сигналом приемника ультразвуковых волн;
этап, на котором мобильный робот поворачивается в рассчитанном направлении; а также
этап, на котором мобильному роботу разрешено движение прямо вперед до прохождения им рассчитанного расстояния.
расчет истинного расстояния между мобильным роботом и удаленным контроллером с добавлением половины диаметра мобильного робота к рассчитываемому расстоянию.
этап, на котором если два или несколько приемников ультразвуковых волн из набора принимают ультразвуковой сигнал, то расстояние между мобильным роботом и удаленным контроллером рассчитывается исходя из времени достижения ультразвуковым сигналом двух или нескольких приемников ультразвуковых волн; а также
этап, на котором истинное расстояние между мобильным роботом и удаленным контроллером рассчитывается исходя из тригонометрического обмера для каждого рассчитанного расстояния.
S=340 [м/с]·(Т2-Т1),
где 340 [м/с] - скорость звука, Т1 - время приема ультразвукового сигнала, а Т2 - время генерации ультразвукового сигнала после приема радиочастотного сигнала.
| ПЫЛЕСОС С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1997 |
|
RU2127997C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СТАБИЛИЗИРОВАННЫХ ИЗОБРАЖЕНИЙ НА СЕТЧАТКЕ | 2009 |
|
RU2416382C1 |
| JP 61253482 А, 11.11.1986 | |||
| СМЕСЬ ДЛЯ ВЫСОКОТЕМПЕРАТУРНОЙ ОТДЕЛКИ БЕТОНА СТЕКЛОВИДНЫМ ПОКРЫТИЕМ | 2009 |
|
RU2394797C1 |

