Изобретение относится к способам формирования астатических систем автоматического управления динамическими объектами авиационной техники с неопределенными параметрами, известными лишь приближенно.
Известен способ (прототип) формирования статических систем автоматического управления динамическими объектами с неопределенными параметрами на основе теории модально-инвариантных систем управления (Елисеев В.Д., Комаров А.К. Модально-инвариантные системы управления: Учебное пособие. - М.: Изд-во МАИ, 1983, - 69 с., ил.) в соответствии с изобретением (Петров Б.Н., Елисеев В.Д., Соколов Н.И., Комаров А.К. Система автоматического управления многомерным нестационарным объектом. Авт.св. №429642, СССР, 28.01.74), заключающийся в том, что формируют эталонную модель движения объекта с приближенно известными параметрами, которой управляет наряду с объектом астатическое исполнительное устройство системы, формируют эталонный входной сигнал исполнительного устройства на основе суммирования усиленных сигналов переменных состояния модели, суммируют его с задающим сигналом, измеряют координаты объекта, формируют разностные сигналы координат объекта и соответствующих координат модели, формируют сигнал коррекции в виде суммы усиленных разностных сигналов, суммируют его с входным эталонным и задающим сигналами исполнительного устройства, а также со своими коэффициентами усиления суммируют с входными сигналами каждого интегратора модели, т.е. с производными ее переменных состояния.
Достоинством прототипа является существенное уменьшение чувствительности динамики системы к неопределенности параметров объекта
Недостатком прототипа является отсутствие астатизма по управляющему и возмущающим воздействиям.
Отличие предлагаемого способа от прототипа состоит в том, что для обеспечения астатизма предварительно формируют по прототипу подсистему так, чтобы она обладала интегрирующим свойством независимо от вариаций параметров объекта, формируют входной задающий сигнал сформированной подсистемы в виде усиленной разности сигналов заданной и измеряемой управляемой координаты объекта.
Такая последовательность действий над измеряемыми и дополнительно формируемыми сигналами позволяет синтезировать астатическую систему с одновременным уменьшением чувствительности к неопределенности параметров объекта при увеличении коэффициентов усиления разностных сигналов.
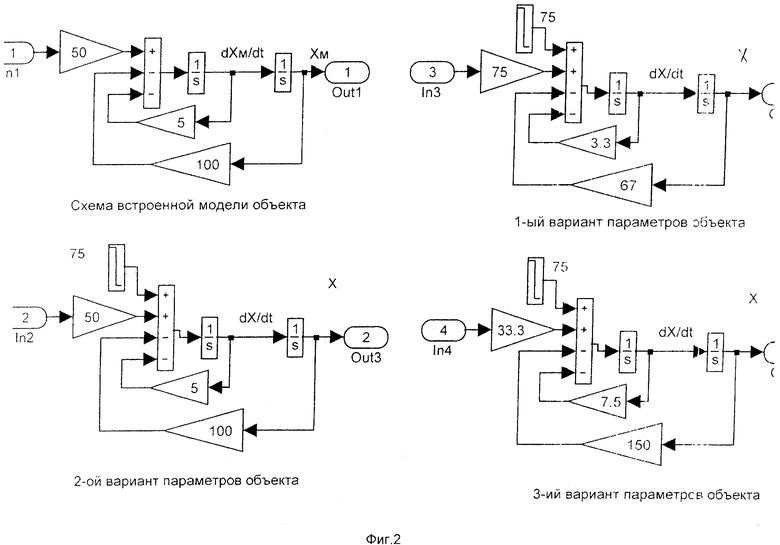
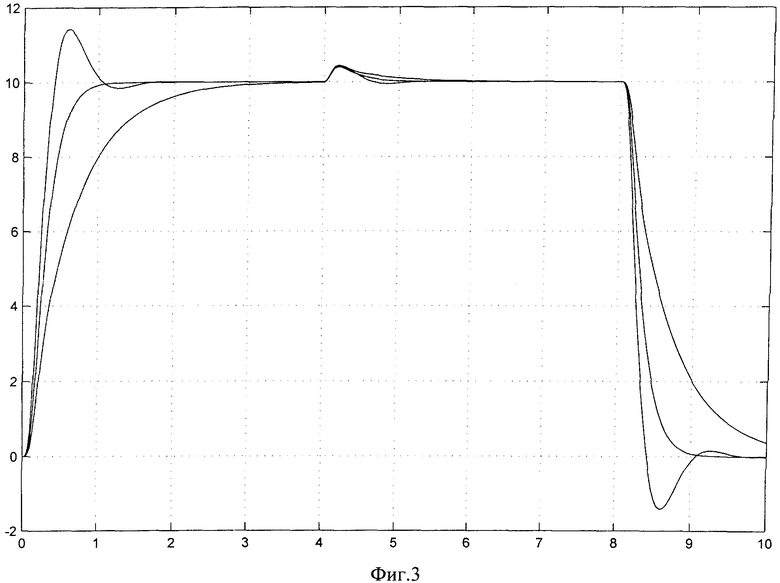
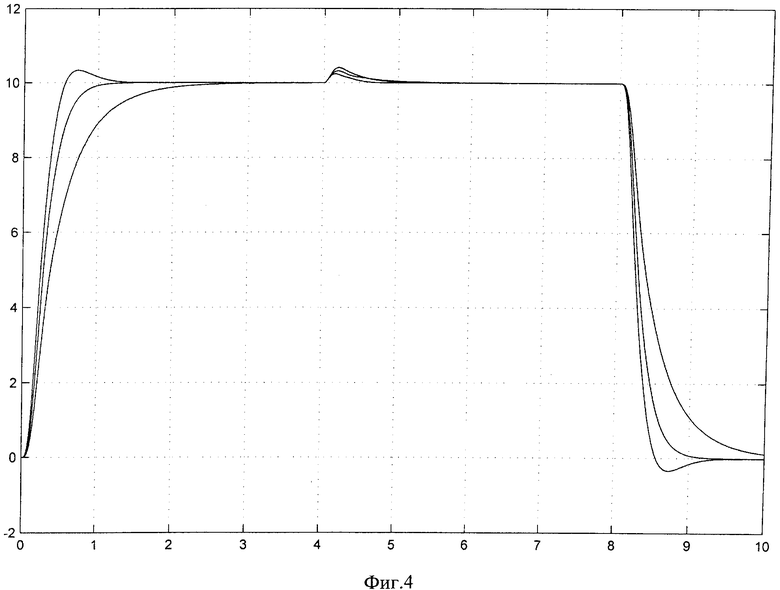
Суть изобретения поясняется фиг. 1, где изображена схема астатической системы автоматического управления объектом с неопределенными параметрами, сформированная по предлагаемому способу; на фиг. 2 представлены конкретизированные схемы эталонной модели объекта управления второго порядка с приближенно известными параметрами и модели самого объекта при возможных разбросах его параметров. На фиг. 3 и фиг. 4 представлены переходные процессы изменения управляемой координаты объекта по результатам моделирования сформированной в примере системы.
Принятые обозначения:
1 - усилитель сигнала разности заданной xз и измеряемой x управляемой (выходной) координаты объекта;
2 - астатическое исполнительное устройство системы, управляющее объектом и эталонной моделью его движения;
3 - объект управления;
4 - эталонная модель движения объекта (виртуальный объект);
5 - блок формирования эталонного сигнала (суммы усиленных сигналов переменных состояния модели, формирующих эталонный контур);
6 - блок формирования сигнала коррекции (суммы усиленных разностных сигналов координат объекта и модели);
xз - заданное значение управляемой координаты объекта;
x - измеряемое значение управляемой координаты объекта;
xм - управляемая координата модели;
d - выходная координата и сигнал исполнительного устройства (вход объекта и модели);
uз - входной задающий сигнал подсистемы (усиленный сигнал разности заданного xз и измеряемого x значений управляемой координаты объекта);
uэ - эталонный входной сигнал исполнительного устройства (сумма усиленных сигналов переменных состояния модели);
uк - сигнал коррекции (сумма усиленных разностных сигналов координат объекта и соответствующих координат модели);
u - результирующий входной сигнал исполнительного устройства (u=uз-uэ-uк).
Последовательность действий по способу заключается в следующем.
Формируют эталонную модель 4 движения объекта 3 с приближенно известными параметрами уравнений объекта 3 с входным сигналом в виде выходного сигнала исполнительного устройства 2 системы.
Формируют в блоке 5 эталонный входной сигнал uэ исполнительного устройства 2 в виде суммы усиленных сигналов переменных состояния модели 4. Коэффициенты усиления эталонного сигнала выбирают так, чтобы образовавшийся эталонный контур обладал интегрирующим свойством (имел по крайней мере нулевой корень характеристического уравнения). Это обеспечивают выбором коэффициента усиления обратной связи по управляемой координате xм модели 4.
Измеряют координаты объекта 3.
Формируют разностные сигналы координат объекта 3 и соответствующих координат модели 4.
Формируют в блоке 6 сигнал коррекции uк как сумму усиленных разностных сигналов.
Суммируют сигнал коррекции uк с эталонным uэ и задающим uз сигналами, а также со своими коэффициентами усиления с входными сигналами интеграторов модели, т.е. с производными переменных состояния, как это делается в наблюдающих устройствах. Сигнал коррекции позволяет уменьшить чувствительность сформированной подсистемы к неопределенности параметров объекта. Коэффициенты усиления должны быть выбраны или рассчитаны так, чтобы не нарушить интегрирующее свойство получающейся подсистемы.
Отметим, что в упрощенном варианте сигнал коррекции модели 4 суммируют только с входным сигналом модели (дополнительно к сигналу d), что резко упрощает расчет формируемой подсистемы, обладающей интегрирующим свойством.
Формируют задающий сигнал uз подсистемы в виде усиленного в усилителе 1 сигнала разности заданного xз и измеряемого x значений управляемой координаты объекта. Этот сигнал uз суммируют с эталонным сигналом uэ и сигналом коррекции uк, получая тем самым результирующий входной сигнал u=uз-uэ-uк исполнительного устройства 2.
В результате сформированная по предлагаемому способу система обеспечивает астатизм как по управляющему, так и по возмущающим воздействиям, а также уменьшение чувствительности к неопределенности параметров объекта при увеличении коэффициентов усиления разностных сигналов.
Рассмотрим предлагаемый способ на примере упрощенного синтеза астатической системы управления объектом 3 второго порядка, имеющего дифференциальное уравнение
d2x/dt2+a1dx/dt+a0x=bd+f,
где a1, a0, b - неопределенные параметры уравнения объекта с априорно известными значениями: a1=5, a0=100, b=50, которые реально могут иметь в 1,5 раза большие или в 1,5 раза меньшие значения в непредвиденные стороны;
f - постоянное неопределенное возмущение, которое может принимать максимальные значения, равные по величине 75 возможно разных знаков.
Пусть измеряются координаты объекта dx/dt и x, где x - управляемая координата объекта 3.
Пусть исполнительное устройство 2 имеет передаточную функцию вида
WИУ(s)=625/(s2+32s+625).
Последовательность действий для рассматриваемого примера
Формируют встроенную модель 4 движения объекта 3, которой управляет исполнительное устройство 2 по сигналу d, описываемую уравнением объекта 3 с приближенно известными параметрами объекта, т.е. в виде
d2xм/dt2+5dxм/dt+100xм=50d.
Формируют эталонный входной сигнал исполнительного устройства 2 для управления объектом и виртуальным объектом (эталонной моделью) с обеспечением интегрирующего свойства образующегося эталонного контура, например, полагая при WИУ(s)=1 в виде желаемого уравнения
d2xм/dt2+8dxм/dt=50uз.
Предполагая в упрощенном расчете WИУ(s)=1, найдем требуемые коэффициенты блока 5: по координате dxм/dt, равный (8-5)/50, а по координате xм, равный -100/50.
Это означает, что сигнал uэ равен
uэ=3/50dxм/dt-2xм.
На исполнительное устройство этот сигнал попадает с отрицательным знаком.
Положительная обратная связь 2xм обеспечивает интегрирующее свойство эталонной системы, состоящей из исполнительного устройства (или его модели в усложненном варианте), модели объекта (виртуального объекта), блока 5.
Формируют сигнал коррекции uк в виде суммы усиленных разностных сигналов (dx/dt-dxм/dt) и (x-xм) с выбираемыми коэффициентами усиления, которые возьмем вначале равными 0,5 и 1 соответственно. В другом случае увеличим их в 20 раз для демонстрации уменьшения чувствительности системы к неопределенности параметров объекта (фиг. 4).
Формируют входной задающий сигнал uз для сформированной подсистемы в виде
uз=к(xз-x),
где коэффициент к усилителя 1 находят моделированием сформированной системы, обеспечивая приемлемые процессы управления при неблагоприятных значениях неопределенных параметров объекта, когда его уравнения имеют два крайне неблагоприятных вида
d2x/dt2+3.3dx/dt+67x=75d+75,
d2x/dt2+7dx/dt+150x=33.3d+75.
Схема моделирования сформированной системы показана на фиг. 1, где схемы имитационного моделирования объекта 3 и его эталонной модели 4 приведены на фиг. 2.
Переходные процессы управляемой координаты x при заданном значении xз=10 приведены на фиг. 3 при выбранном коэффициенте усилителя 1, равном 0,8, для расчетных значений параметров объекта и двух крайне неблагоприятных. Этот коэффициент выбран из условия минимальной длительности наиболее медленного переходного процесса при допустимом перерегулировании наиболее быстрого процесса, равном 16%. На фиг. 4 приведены аналогичные процессы, но при увеличенных в 20 раз значениях коэффициентов усиления разностных сигналов.
Сравнение процессов на фиг. 3 и 4 показывает уменьшение чувствительности системы к неопределенности параметров объекта при увеличении коэффициентов усиления разностных сигналов, что проявляется в уменьшении разброса длительности и перерегулирования переходных процессов. На 4-й секунде показано влияние возмущающего воздействия f=75. Как видно, астатизм также обеспечивается.
Технический результат от использования изобретения заключается в том, что способ позволяет устранить недостаток прототипа в части отсутствия астатизма и сохранить его достоинства в части уменьшения чувствительности астатической системы к неопределенности параметров объекта при увеличении коэффициентов усиления разностных сигналов, что связано с особенностью модально-инвариантных систем, допускающих такую возможность.
Изобретательский уровень предлагаемого способа подтверждается отличительной частью формулы изобретения, а именно предварительным формированием модально-инвариантной подсистемы, понижающей чувствительность к неопределенности параметров объекта с одновременным обеспечением интегрирующего свойства разомкнутой системы для получения астатизма по управляющим и возмущающим воздействиям замкнутой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования астатических быстродействующих демпферов летательных аппаратов | 2019 |
|
RU2727612C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИРЕКТОРНОГО УПРАВЛЕНИЯ ПО ЭТАЛОННЫМ СИГНАЛАМ МОДЕЛИ ОБЪЕКТА | 2010 |
|
RU2454693C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНЫХ И УГЛОВЫХ ПЕРЕГРУЗОК ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2014 |
|
RU2569235C1 |
| СПОСОБ СНИЖЕНИЯ ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2603703C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| Система автоматического управления беспилотным летательным аппаратом по углу рыскания | 2016 |
|
RU2675976C2 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
Изобретение относится к области астатического автоматического управления динамическими объектами с неопределенными параметрами на основе встроенной модели движения объекта и модальной инвариантности. Способ заключается в том, что формируют с помощью встроенной эталонной модели движения объекта модально-инвариантную подсистему, обладающую интегрирующим свойством (при инвариантном нулевом корне ее характеристического многочлена), формируют входной задающий сигнал для сформированной подсистемы в виде усиленной разности заданной и измеряемой управляемой координаты объекта, что обеспечивает астатизм замкнутой системы. На примере автоматического управления объектом второго порядка показано получение астатизма по управляющему и возмущающему воздействиям, а также уменьшение чувствительности сформированной системы к неопределенности параметров объекта. Изобретение направлено на уменьшение чувствительности астатической системы к неопределенности параметров объекта. 4 ил.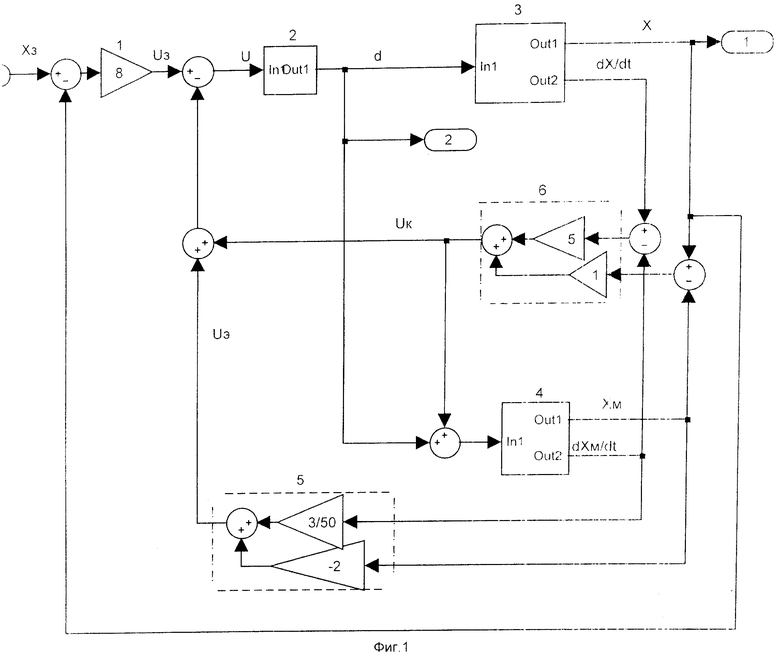
Способ формирования астатических систем управления объектами с неопределенными параметрами на основе встроенных моделей и модальной инвариантности, заключающийся в том, что формируют эталонную модель движения объекта с приближенно известными параметрами, которой управляет наряду с объектом астатическое исполнительное устройство системы, формируют эталонный входной сигнал исполнительного устройства на основе суммирования усиленных сигналов переменных состояния модели, суммируют его с задающим сигналом, измеряют координаты объекта, формируют разностные сигналы координат объекта и соответствующих координат модели, формируют сигнал коррекции в виде суммы усиленных разностных сигналов, суммируют его с входным эталонным и задающим сигналами исполнительного устройства, а также со своими коэффициентами усиления суммируют с входными сигналами каждого интегратора модели, т.е. с производными ее переменных состояния, отличающийся тем, что формируют по прототипу подсистему так, чтобы она обладала интегрирующим свойством независимо от вариаций параметров объекта, формируют входной задающий сигнал для сформированной подсистемы в виде усиленной разности сигналов заданной и измеряемой управляемой координаты объекта.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИРЕКТОРНОГО УПРАВЛЕНИЯ ПО ЭТАЛОННЫМ СИГНАЛАМ МОДЕЛИ ОБЪЕКТА | 2010 |
|
RU2454693C1 |

