1
Изобретение относится к автоматике и может найти применение при проектировании систем автоматического управления различлыми объектами с переменными параметрами.
Известны системы управления многомерными нестационарными объектами по сигналам оценок его фазовых координат (оценок переменных состояний), содержащие блок управления - последовательное соединение усилителей и исполнительных устройств,-выходы которого подключены ко входам объекта управления, чувствительные элементы, сумматоры, модели чувствительных элементов и модель последовательного соединения объекта управления и исполнительных устройств, основные входы которой подключены к выходам усилителей блока управления, и выходы которой соединены с первыми входами блока управления и через модели чувствительных элементов - с первыми входами сумматоров, вторые входы которых соединены с чувствительными элементами объекта управления, а выходы сумматоров сравнения соединены со вспомогательн1 ми входами модели объекта управления. Однако, если параметры объекта управления неизвестны или известны неточно, диапазон изменения качественных показателей системы управления нестационарным объектом, например времени переходного процесса и его колебательности, определяется максимальным разбросом параметров нестационарного объекта управления относительно параметров модели объекта управления, причем качественные показатели системы управления изменяются вместе с изменением параметров объекта управления. Системы автоматического управления нестационарными объектами по сигналам
оценок их фазовых координат (оценок переменных состояния) не позволяют регулировать диапазон изменения качественных показателей. Кроме того, при управлении нестационарными объектами п-го порядка указанпые системы управления не производят коррекцию по п-ным производным выходных фазовых координат объектов управления.
Целью изобретения является расширение возможностей компенсации влияния переменных параметров объекта управления на качественные показатели системы управления и направленного регулирования диапазона изменения качественных показателей системы управления, например уменьшения разброса
динамических характеристик, так что при изменении параметров объекта управления качественные показатели системы должны изменяться в заданных пределах. Это достигается тем, что вторые выходы всех сумматоров
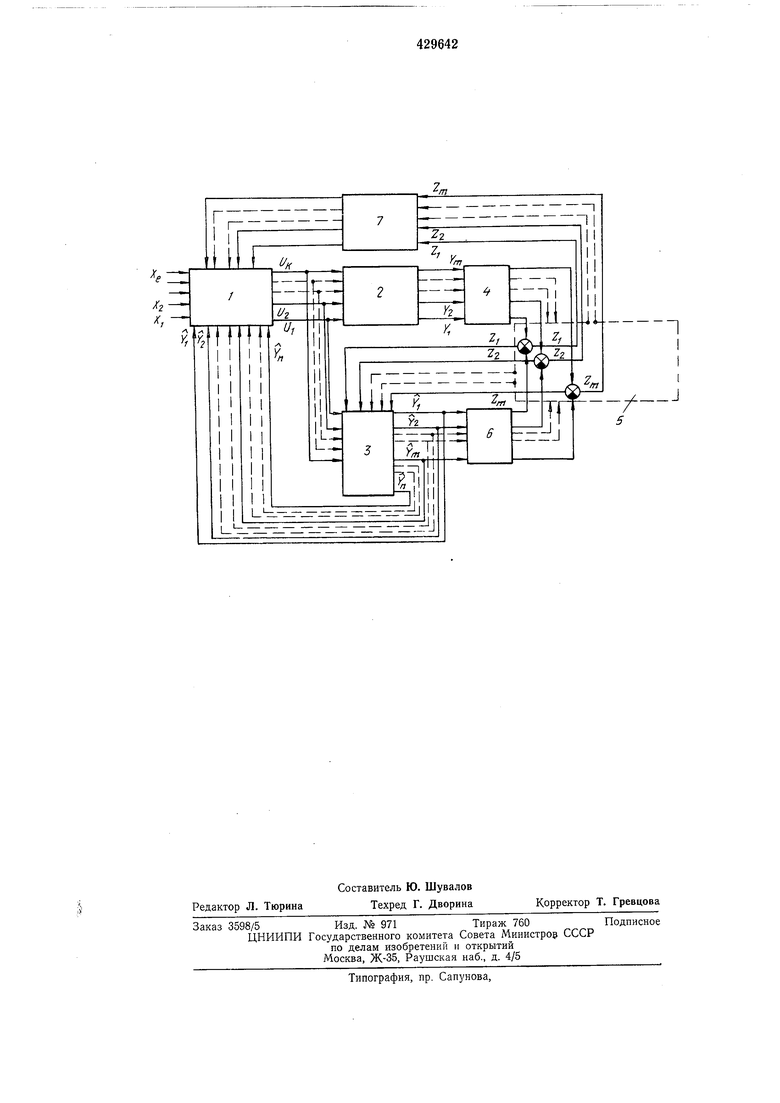
сигналов фазовых координат (переменных соСтояния) объекта управления с выходов чувствительных элементов и соотвстствуюиигх им сигналов оценок фазовых координат объекта управления с выходов моделей чувствительных элементов дополнительно подключены через дополнительные инвертируютиле усилители ко вторым входам блока управления, выходы которого соединены с основными входами модели объекта управления. На чертеже представлена блок-схема предлагаемой системы автоматического управления многомерным нестационарным объектом. Задающие воздействия Xi, Х2,..-Хк поступают на основные входы блока управления 1, который, например, представляет собой последовательное соединение блока суммирующих усилителей и исполнительных устройств. С выходов блока управления 1 управляющие воздействия f/b Ui,...Uk поступают на входы нестационарного объекта управления 2 и на cciiGBiiwc входы стационарной модели 3 объекта управления, например, выполненной в виде блока интеграторов. Выходные сигналы фазовых координат УЬ У2,-Ут объекта управления 2 измеряют с помощью чувствительных элементов 4 и подают на вторые входы сумматоров 5, например, выполненных на суммирующих усилителях. Сигналы оценок измеренных фазовых координат УЬ У2,.-Ут с выходов модели 3 объекта управления через модели 6 чувствительных элементов подают на вторые входы сумматоров 5. С выходов сумматоров 5 сигналы разностей Zi, Z«,...Zr:i измеренных фазовых координат УЬ Уг-.-Ут объекта управления 2 и соответствующих им сигналов оценок УЬ У2,...Ут фазовых координат нодают на дополнительные входы модели 3 объекта управления для коррекции сигналов оценок всех фазовых координат УЬ У2,-.-У7п, У объекта управления. Сигналы оценок всех фазовых координат УЬ У2,.-.Ут,..-Угг объекта управления с выходов модели 3 подают на первые входы блока управления 1 в виде сигналов обратных связей для формирования сиг-налов управляющих воздействий Ui, Uz,-..UtiС выходов сумматоров 5 сигналы разностей Z, ,...Zm измеренных фазовых координат УЬ У2,...Ут объекта управления с выходов чувствительных элементов 4 и соо1ветствующих им сигналов оценок УЬ У2.--У7п фазовых координат с выходов моделей 6 чувствительных элементов подают дополнительно через инвертирующие усилители 7 на вторые входы блока управления 1 для Лопмирования управляющих воздействий и, /2,...f/;(. Сущность работы предлагаемой системы автоматического управления многомерным нестационарным объектом заключается в следующем. Управляющие воздействия t/ь Uz,-..Uh, постунающие на управления 2, образуют как суммы задаюии-1х воздействий Х, Xz,...Xe и сигналов оценок УЬ У2,...Ут,...Уп всех фазовых координат УЬ У2,...Угп,...Уп объекта управления, которые усиливают в блоке управления (с коэффициентами обратных связей), и сигналы разностей Zi, Z,...Zm измеренных фазовых координат УЬ У2,.. объекта управления и соответствующих им сигналов оценок УЬ У2,...}те фазовых координат, которые усиливают на инвертирующих усилителях {с коэффициентами адаптации). Сигналы оценок всех фазовых координат объекта получают с выходов модели 3 объекта управления, например, стационарной, так что коэффициенты дифференциальных уравнений модели 3 объекта управления могут отличаться от коэффициентов дифференциальных уравнений объекта управления 2. Структура получения сигналов оценок фазовых координат такова, что подбором соответствующего усиления интеграторами модели 3 объекта управления (с коэффициентами оценок) сигналов разностей с выходов сумматоров 5, выполняющих операции сравнения сигналов фазовых координат с соответствующими сигналами оценок фазовых координат, можно сколь угодно точ„ „ но приблизить все сигналы оценок УЬ У2.--Ут,...У-,г фазовых координат к соответствующим фазовым координатам УЬ У2,...Ут,-..Уп управления, несмотря на отличие реальных коэффициентов объекта управления от коэффициентов модели объекта управления (при отсутствии ошибок измерения). Сигналы оценок фазовых координат объекта управления зависят двояко от сигналов разностей Z, Zz,... Zm измеренных фазовых координат объекта управления и соответствующих им сигналов оценок фазовых координат- непосредственно и через управляющие воздействия f/ь Uz,...llk. Это позволяет, в соответствии с реализуемым таким образом принципом двухканальности, путем соответствующего усиления сигналов разностей с выходов сумматоров по каналам коррекции выходных сигналов модели объекта управления и дополнительным каналам формирования управляющих воздействий, а также соответствующим усилением сигналов оценок со всех выходов модели объекта унравления, получать требуемую степень независимости (инвариантность) сигналов оценок фазовых координат от сигналов разностей с сумматоров сравнения, а следоватслько, и сг переменных параметров объекта управления. При выполнении условия инвариантности сигналы оценок фазовых координат принимают эталонные значения, а ак как фазовые координатыобъекта управления близки к сигналам своих оценок, то и фазовые координаты объекта управления близки к эталонным значениям. Это и требуется в задачах управления с постоянным качеством. Кроме того, в ряде задач требуется направленно изменять в определенном диапазоне эталонный процесс (качество системы управления) при изменении параметров объекта, например, с целью уменьшения дополнительных управляющих воздействий на объект. Предлагаемая система управления обладает и этой возможностью, так как выбором соотношений усилений сигналов разностей по каналам коррекции оценок фазовых координат и дополнительным каналам формирования управляющих воздействий определяют направленное изменение эталонного процесса и диапазон этого изменения. Предлагаемая система управления позволяет корректировать управление нестационарным объектом п-то порядка по производным выходной фазовой координаты до п-го порядка включительно и при этом избегать дифференцирования в явном виде сигналов измеренных фазовых координат объекта управления, что повышает помехозащищенность системы управления. Она обладает определенной общностью и позволяет путем линейных преобразований получать различные системы управления нестационарными объектами. Так, например, можно сделать переход, с точностью до входного компенсационного фильтра, к системе управления нестационарным объектом путем охвата функционально необходимых звеньев специально подобранными стационарными корректирующими устройствами. Предлагаемое подключение блока управления (соединение усилителей и исполнительных устройств) и модели объектд управления позволяет формировать и производить отладку эталонного движения системы на стенде, что является особенно удобным в случае, когда не представляется возможным достаточно точно описать работу исполнительных устройств. Достоинством является также невозможность ее реализации в виде набора идентичных блоков, выполненных на унифицированных аналоговых или цифровых элементах, например на интеграторах. В качестве примера рассмотрим объект управления, описывающийся дифференциальным уравнением первого порядка -A(t).Y + B(t).U,(1) где У--управляемая фазовая координата обьекта; и-входное управляющее воздействие объекта; A(t) иВ(/)-переменныекоэффициенты объекта. Пусть У измеряется без помех и требуется, чтобы переходный процесс по Y не зависел от Л(1) и B(t) и был близок к некоторому э.тлои;10).:у процессу. Сигнал оценки Y фазовой координаты описывасгся уравнением -A-Y + B-U+K -Z, где У - сигнал оценки фазовой координаты объекта; .1 и В - коэффициенты приближенного уравнения объекта, например, постоянные и равные соответствующим коэффициентам объекта управления в некоторый момент времени (расчетный режим); Ai - коэффициент оценки; Z - разность измеренного значения У и сигнала оценки У, Z г У - F.(3) 4U;M больнее коэффициент К, тем ближе сигнал оценки У к фазовой координате объекта У. Согласно изобретению, управляющее воздейстзке объекта определяется уравнением и (КХ- - лУ).- .(4) в соответствии с предлагаемой системой слагаемое введено со знаком, тротипоиолоукным знаку слагаемого KiZ в уравнспнг оценки (2). Здесь X - задающее воздействие; К - козфйициент усиления задающего воздействия; /С- - коэффициент адаптации; г - коэффициент обратной связи. Коэффициенты К, К, -2, ;i. В - постоянные. С учетом (4) уравнение (2) принимает вид (y. + A)Y + . (5) При равенстве коэффициентов Ki и /Сг слагаемые с разностью Z компенсируют друг ii)yr;i, и оценки У не зависит от Z, а сле;г,(1Блтельно, и от переменности параметров ..сга унравлепия. Такюл образом, процесс изменения У явля: СИ талониы ;. Так как коэффициенты /Ci и Kz достаточно , то и сигнал оценки У близок к У, т. е. nciiecc изменепия достаточно близок к этас пному тпоцсссу на всех режимах.
Уравнение эталонного процесса изменения сигнала оценки принимает вид
dY
( + А)У + КХ.
(6)
dt
Эталонный процесс существенно зависит от величины коэффициента обратной связи |j,. В случае неравенства коэффициента оценки К и коэффициента адаптации /С2, появляется возможность направленного изменения эталонного процесса, а следовательно, и качества системы управления. Так, например, при появляется составляющая управления эталонным процессом, равная (Ki-KZ). При коэффициенте адаптации , коэффициенте оценки , фиксированном коэффициенте обратной связи }i const процесс изменения координаты У равен эталонному только на расчетном режиме. При изменении параметров объекта управления диапазон изменения динамических свойств системы максимален, и характер поведения фазовой координаты У определен уравнением
,lA(t) + .Y + KX. (7) Lв в
Как правило, в задачах управления нестационарными объектами не требуют неизменности динамических свойств системы на всех режимах, а задают направленное изменение динамических свойств системы в определенном диапазоне, что приводит к выбору коэффициента адаптации /Сд не равным коэффициенту оценки /Сь При объекте управления более высокого порядка (объект описывается системой дифференциальных уравнений в нормальной форме) получаем более сложную систему уравнений оценок, и эталонный процесс не может быть полностью независим от нестационарности объекта. Однако выбором соответствующих величин и соотношений коэффициентов адаптации и коэффициентов оценок и величин коэффициентов обратных связей эту зависимость делают либо достаточно малой, либо отвечающей требуемому изменению качества управления.
Предмет изобретения
Система автоматического управления многомерным нестационарным объектом, содержащая блок управления, выходы которого
подключены ко входам объекта управления, чувствительные элементы, сумматоры, модели чувствительных элементов и модель объекта управления, например, с постоянными коэффициентами (параметрами), выходы которой соединены с первыми входами блока управления и через модели чувствительных элементов - с первыми входами сумматоров, вторые входы которых соединены с чувствительными элементами объекта управления,
первые выходы сумматоров соединены со вспомогательными входами модели объекта управления, отличающаяся тем, что, с целью расширения возможностей компенсации влияния неременных параметров объекта
управления на качественные показатели системы управления и направленного регулирования диапазона изменения качественных показателей системы управления нестационарным многомерным объектом, например уменьшения разброса динамических характеристик, вторые выходы сумматоров подключены через дополнительно установленные инвертирующие усилители ко вторым входам блока управления, выходы которого соединены с ост
новными входами модели объекта управде ния.

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОМЕРНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1974 |
|
SU429640A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
| Устройство для управления многомерным объектом | 1976 |
|
SU646309A1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Система идентификации параметров объекта | 1986 |
|
SU1413597A1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА | 2016 |
|
RU2610831C1 |