Группа изобретений относится к области транспорта, а именно к способу снижения динамической нагруженности транспортного средства при движении по поверхности и транспортным средствам, реализующим этот способ.
Из уровня техники известны способы снижения вертикальных и угловых перегрузок (то есть динамической нагруженности) транспортного средства при движении по поверхности и транспортные средства, реализующие эти способы.
Так, в патенте России №2483938, дата регистрации 10.06.2013, МПК: B60W 10/22; B60W 40/10; В64С 25/00 [1], представлен способ снижения динамической нагруженности транспортного средства при движении по поверхности, основанный на регулировании жесткости и демпфирования установленного на транспортном средстве по меньшей мере одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию в логико-вычислительную подсистему.
Недостаток данного способа снижения динамической нагруженности транспортных средств состоит в том, что быстродействие изменения характеристики по жесткости амортизационной стойки недостаточно. При этом присущее исполнительным органам запаздывание в отработке сигналов управления ограничивает возможности снижения динамических нагрузок при встрече с неровностями пути.
В патенте [1] также представлено транспортное средство (в том числе самолет), реализующее этот способ, содержащее корпус, амортизирующее устройство, систему управления жесткостью и демпфированием амортизирующего устройства, систему управления, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства.
Недостаток такого транспортного средства состоит в том, что быстродействие изменения характеристики по жесткости амортизационной стойки недостаточно. При этом присущее исполнительным органам запаздывание в отработке сигналов управления ограничивает возможности снижения нагрузок при встрече с неровностями пути.
Изобретение [1] принято в качестве наиболее близкого аналога заявленного способа и транспортного средства.
Решаемой группой изобретений задачей является снижение динамических нагрузок транспортного средства при движении по неровной поверхности.
Технический результат группы изобретений состоит в повышении быстродействия срабатывания изменения коэффициента жесткости амортизирующего устройства при движении транспортного средства по поверхности при повышении качества вырабатываемого сигнала для амортизирующего устройства.
Сущность группы изобретений состоит в следующем.
Способ снижения динамической нагруженности транспортного средства при движении по поверхности, основанный на регулировании жесткости и демпфирования, установленного на транспортном средстве по меньшей мере одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию в логико-вычислительную подсистему, но в отличие от наиболее близкого аналога [1] в качестве исходных данных от логико-вычислительной подсистемы в систему управления поступают команды на изменение коэффициентов жесткости и демпфирования амортизационных стоек амортизирующего устройства, перегрузки транспортного средства в различных его частях, скорости движения транспортного средства, по которым в вычислителе логико-вычислительной подсистемы вычисляют перегрузку, сравнивают перегрузку с эталонной моделью логико-вычислительной подсистемы, затем подают сигналы с вычислителя и эталонной модели на регулятор логико-вычислительной подсистемы, посредством которого выдают команды на изменение характеристик по жесткости и демпфированию по меньшей мере одного амортизирующего устройства, при этом характеристики жесткости и демпфирования изменяют путем регулирования объема пневмоаккумулятора посредством клапанов с пропорциональным управлением, находящихся между ресивером (компрессором) и пневмоаккумулятором, а также стравливающих клапанов пневмоаккумулятора.
Способ снижения динамической нагруженности транспортного средства, характеризующийся тем, что при перегрузке, превышающей нормируемую величину, уменьшают коэффициенты жесткости амортизационных стоек амортизирующего устройства путем увеличения объема пневмоаккумулятора соответствующей амортизационной стойки амортизирующего устройства при сохранении уровня давления запитки пневмоаккумулятора с сохранением запасов прямого и обратного хода при использовании сигнала датчика перемещения штока амортизационной стойки.
Способ снижения динамической нагруженности транспортного средства, характеризующийся тем, что при уменьшении величин неровностей поверхности, полученных при сканировании, коэффициенты жесткости увеличивают путем уменьшения объема пневмоаккумулятора и повышения в рабочем объеме пневмоаккумулятора избыточного давления инертного газа соответствующей амортизационной стойки амортизирующего устройства.
Способ снижения динамической нагруженности транспортного средства, характеризующийся тем, что при снижении перегрузки из логико-вычислительной подсистемы в систему управления подается команда на возможное увеличение скорости транспортного средства.
Транспортное средство, содержащее корпус, амортизирующего устройство, систему управления жесткостью и демпфированием амортизирующего устройства, систему управления, логико-вычислительную подсистему, оснащенную блоком памяти, содержащим информацию о реакции модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, сканером, блоком сравнения характеристик поверхности с имеющимися в блоке памяти типами неровностей поверхности и реакцией модели транспортного средства на аналогичные характеристики поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства, но в отличие от наиболее близкого аналога [1] логико-вычислительная подсистема дополнительно содержит вычислитель и регулятор, по меньшей мере одно амортизирующее устройство содержит амортизационную стойку с пневмоаккумулятором, выполненным с возможностью изменения своего объема и давления запитки, при этом пневмоаккумулятор оснащен мембранами с образованием по меньшей мере трех отсеков, пневматически связанных между собой клапанами с электромагнитным управлением, каждый из отсеков пневматически связан посредством клапанов с электромагнитным управлением с системой подкачки, по меньшей мере один из клапанов выполнен с пропорциональным электромагнитным управлением.
Транспортное средство, характеризующееся тем, что система подкачки оснащена ресивером или компрессором.
Транспортное средство, характеризующееся тем, что пневматическая связь пневмоаккумулятора с амортизационной стойкой содержит дроссель, выполненный с возможностью изменения площади проходного отверстия.
Представленные признаки образуют совокупность, обеспечивающую достижение заявленного технического результата.
Действительно, в способе снижения динамической нагруженности транспортного средства, основанном на регулировании жесткости и демпфирования установленного на транспортном средстве по меньшей мере одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию в логико-вычислительную подсистему, при использовании в качестве исходных данных от логико-вычислительной подсистемы в систему управления коэффициентов жесткости и демпфирования амортизационных стоек амортизирующего устройства, перегрузки транспортного средства в различных его частях, скорости движения транспортного средства, в логико-вычислительной подсистеме вычисляют перегрузку, сравнивают перегрузку с максимально допустимой для данного типа транспортного средства и выдают команды на изменение характеристик по жесткости и демпфированию по меньшей мере одного амортизирующего устройства, обеспечивается повышение быстродействия изменения коэффициента жесткости амортизационной системы при движении транспортного средства по поверхности. При этом вычисление в вычислителе логико-вычислительной подсистемы перегрузки, сравнение перегрузки с эталонной моделью логико-вычислительной подсистемы, допустимой для данного типа транспортного средства, подача сигналов с вычислителя и эталонной модели на регулятор логико-вычислительной подсистемы, посредством которого выдаются команды на изменение характеристик по жесткости и демпфированию путем регулирования объема пневмоаккумулятора посредством клапанов с пропорциональным управлением, повышают качество вырабатываемого сигнала на амортизационную систему.
Уменьшение коэффициента жесткости амортизационных стоек путем увеличения объема пневмоаккумулятора соответствующей амортизационной стойки амортизирующего устройства при превышении максимально допустимой величины перегрузки и сохранении давления с сохранением запасов прямого и обратного хода при использовании сигнала датчика перемещения штока амортизационной стойки обеспечивает снижение вертикальных и угловых перегрузок частей транспортного средства, а за счет подачи сигнала на каждую амортизационную стойку соответствующего амортизирующего устройства повышает быстродействие срабатывания амортизирующего устройства при движении транспортного средства по поверхности.
Увеличение коэффициента жесткости амортизационных стоек путем уменьшения объема пневмоаккумулятора и повышения в рабочем объеме пневмоаккумулятора избыточного давления инертного газа в соответствующей амортизационной стойке амортизирующего устройства обеспечивает снижение вертикальных и угловых перегрузок транспортного средства при уменьшении величин неровностей поверхности, а за счет подачи сигнала на каждую амортизационную стойку соответствующего амортизирующего устройства повышает быстродействие срабатывания амортизационной системы при движении транспортного средства по поверхности.
Подача из логико-вычислительной подсистемы в систему управления команды на увеличение скорости транспортного средства при вертикальных и угловых перегрузках ниже максимально допустимой обеспечивает снижение вертикальных и угловых перегрузок частей транспортного средства.
Выполнение транспортного средства содержащим корпус, амортизирующее устройство, систему управления жесткостью и демпфированием амортизационного устройства, систему управления, логико-вычислительную подсистему, оснащенную блоком памяти, содержащим информацию о реакции эталонной модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, сканером, блоком сравнения характеристик поверхности с имеющимися в блоке памяти типами неровностей поверхности и реакцией эталонной модели транспортного средства на аналогичные характеристики поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства, оснащение логико-вычислительной подсистемы вычислителем и регулятором и по меньшей мере одного амортизирующего устройства содержащим амортизационную стойку с пневмоаккумулятором, выполненным с возможностью изменения его объема и давления запитки, выполнение пневмоаккумулятора оснащенным мембранами с образованием по меньшей мере трех отсеков, пневматически связанных между собой клапанами с электромагнитным управлением, пневматической связи каждого из отсеков посредством клапанов с электромагнитным управлением с системой подкачки, оснащение транспортного средства системой подкачки, связанной с пневмоаккумулятором, который оснащен по меньшей мере одним стравливающим клапаном, выполнение одного из клапанов с электромагнитным пропорциональным управлением обеспечивает при движении транспортного средства по поверхности повышение быстродействия срабатывания амортизирующего устройства при повышении качества вырабатываемого сигнала амортизирующего устройства.
Оснащение системы подкачки ресивером или компрессором обеспечивает повышение быстродействия срабатывания амортизирующего устройства при движении транспортного средства по поверхности вследствие более быстрого наполнения пневмоаккумулятора при создании избыточного давления в ресивере или компрессором.
Оснащение пневматической связи пневмоаккумулятора с амортизационной стойкой дросселем, выполненным с возможностью изменения площади проходного отверстия, обеспечивает повышение быстродействия срабатывания амортизирующего устройства при движении транспортного средства по поверхности вследствие возможности более быстрого изменения объема пневмоаккумулятора.
Группа изобретений поясняется чертежами.
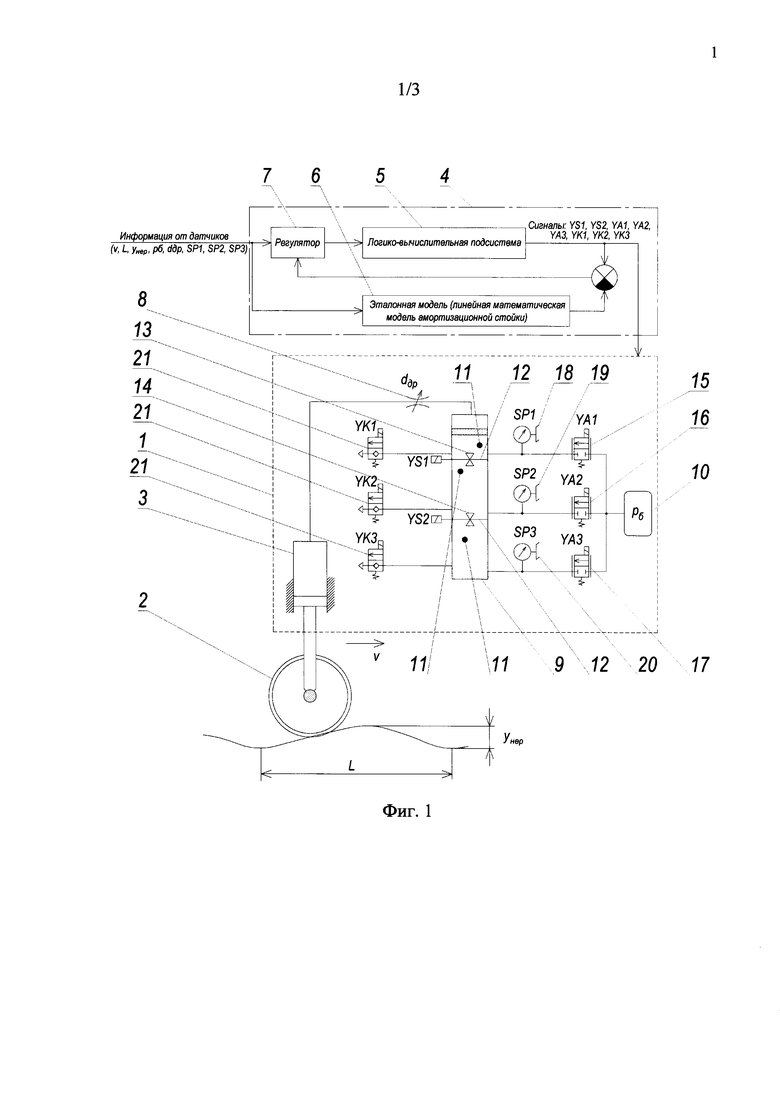
На фиг. 1 представлена модель и принципиальная схема управления установленной на транспортном средстве амортизационной стойки с регулируемыми характеристиками по жесткости и демпфированию.
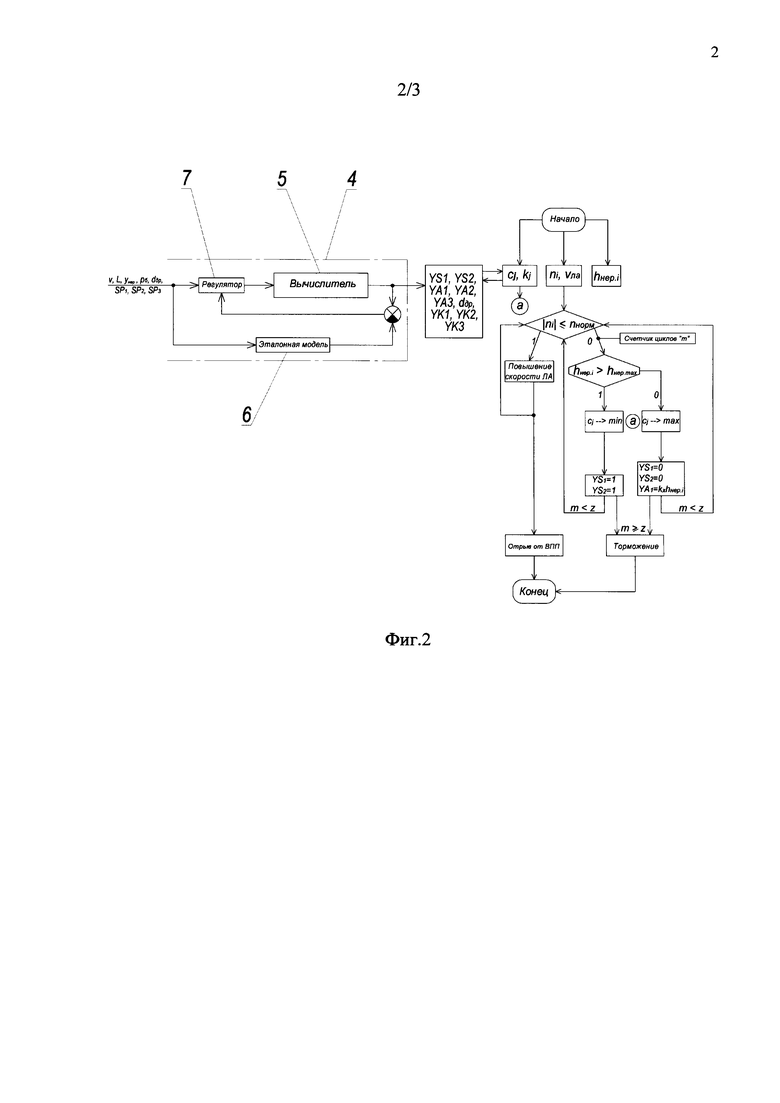
На фиг. 2 представлена алгоритмическая схема работы системы управления характеристиками амортизационных стоек шасси по жесткости и демпфированию.
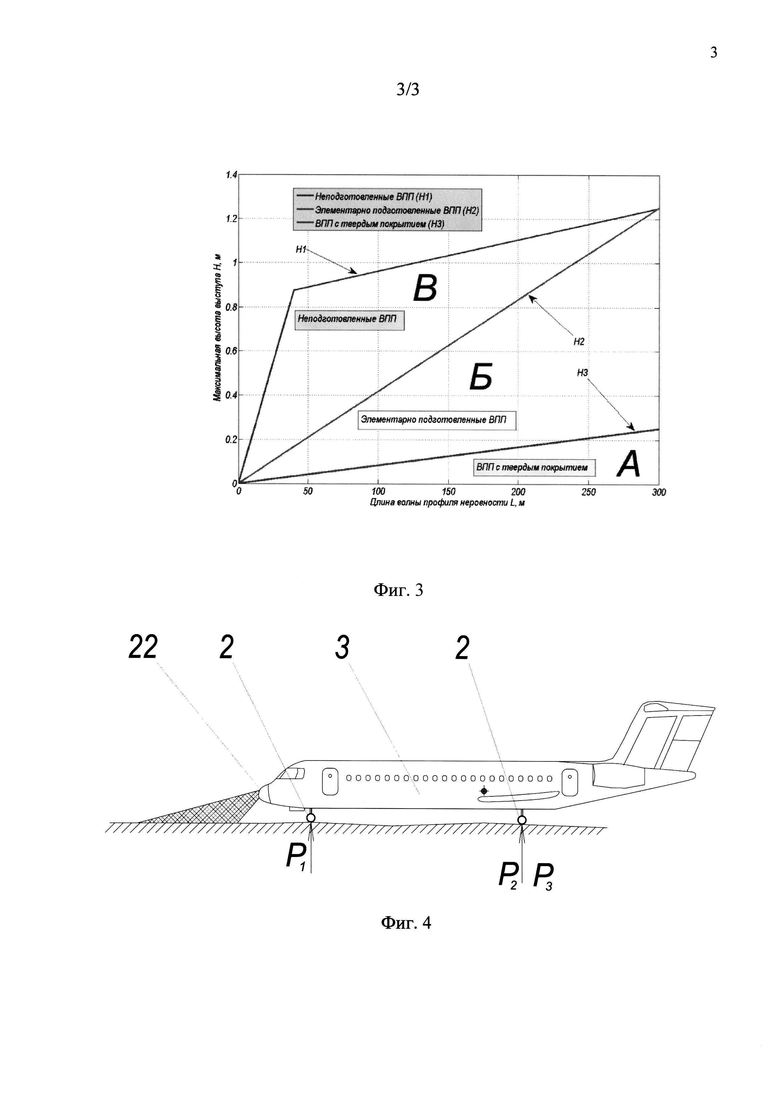
На фиг. 3 представлено нормирование типов неровностей, характерных для поверхности перемещения транспортного средства.
На фиг. 4 показан общий вид самолета со сканирующим устройством.
Реализация группы изобретений
Предлагаемый способ снижения динамической нагруженности транспортного средства при движении по поверхности основан на регулировании жесткости и демпфирования установленного на транспортном средстве по меньшей мере одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию в логико-вычислительную подсистему, содержащую эталонную модель, вычислитель и регулятор, при этом в качестве исходных данных от логико-вычислительной подсистемы в систему управления используются коэффициенты жесткости и демпфирования амортизационных стоек амортизирующего устройства, перегрузки транспортного средства в различных его частях, скорость движения транспортного средства, по которым в вычислителе логико-вычислительной подсистемы вычисляют перегрузку, сравнивают перегрузку с эталонной моделью, результаты сравнения подают на регулятор, который подстраивает управляющие сигналы логико-вычислительной подсистемы, подаваемые на клапаны с пропорциональным управлением, расположенные между ресивером (компрессором) и пневмоаккумулятором, а также на клапаны, стравливающие инертный газ из пневмоаккумулятора.
При перегрузке, превышающей максимально допустимую величину, коэффициенты жесткости амортизационных стоек амортизирующего устройства уменьшают путем увеличения объема пневмоаккумулятора соответствующей амортизационной стойки амортизирующего устройства.
При перегрузке ниже максимально допустимой величины коэффициенты жесткости увеличивают путем уменьшения объема пневмоаккумулятора и повышения в рабочем объеме пневмоаккумулятора избыточного давления инертного газа соответствующей амортизационной стойки амортизирующего устройства.
Кроме того, при перегрузке ниже максимально допустимой из логико-вычислительной подсистемы в систему управления дается разрешение на возможное увеличение скорости транспортного средства.
Для реализации способа необходима по меньшей мере одна амортизационная стойка 1 шасси 2 транспортного средства с моделированием жесткости и демпфирования шасси 2, соединенного с корпусом 3 транспортного средства (фиг. 1). Амортизационная стойка 1 шасси 2 может выполняться как физической, так и математической, обеспечивающей верификацию результатов расчета с физическим экспериментом и физического эксперимента - с динамическими характеристиками транспортного средства. Затем проводят испытания модели амортизирующей стойки транспортного средства при разных параметрах жесткости и демпфирования, а также с различной нагрузкой на корпус 3 транспортного средства при движении над разными типами неровностей с различной скоростью v.
Результаты реакции амортизационной стойки 1 шасси 2 в процессе преодоления неровностей поступают в логико-вычислительную подсистему 4, содержащую вычислитель 5, эталонную модель 6 и регулятор 7 (фиг. 1). При этом в качестве регистрируемых параметров записывают следующие реакции амортизационной стойки 1 шасси 2 транспортного средства: скорость v=dx/dt, угол тангажа ϑ, угловую скорость dϑ/dt и перегрузку в центре тяжести корпуса 3 d2yg/dt2, обжатия yi и перегрузки по осям каждой из амортизационной стоек d2yi/dt2 (фиг. 1), где х - продольная ось, вдоль которой происходит движение транспортного средства, t - время, yg - координата центра тяжести транспортного средства по вертикали, yi - координата i-й амортизационной стойки 1 по вертикали. При этом параметры по жесткости и демпфированию амортизационной стойки 1 шасси 2 зафиксированы при каждом проезде через неровности.
Затем логико-вычислительную подсистему 4 размещают на транспортном средстве, оснащенном по меньшей мере одной амортизационной стойкой, принципиальная схема которой совпадает с амортизационной стойкой 1, регулируемой по жесткости и демпфированию, шасси 2 (фиг. 1), соединенного с корпусом 3 транспортного средства. На транспортное средство устанавливают сканирующее устройство, например сканер поверхности, расположенное перед транспортным средством в направлении движения. В вычислитель 5 и эталонную модель 6 логико-вычислительной подсистемы 4 поступают полученные при сканировании данные о высоте ΔhНЕР и длине L впереди расположенной неровности, а также обработанная информация по кинематическим параметрам транспортного средства (v=dx/dt; ϑ; dϑ/dt; d2yg/dt2; d2yi/dt2 и др.) от датчиков (на фиг. не показаны). В регуляторе 7 производится сравнение данных, полученных в вычислителе 5 и эталонной модели 6, и вырабатывается корректирующий сигнал, который с логико-вычислительной подсистемы 4 поступает на соответствующую амортизационную стойку 1.
Амортизационная стойка 1 шасси 2 транспортного средства (фиг. 1) содержит регулируемый дроссель 8, пневмоаккумулятор 9 и подкачивающее устройство, например ресивер 10 или компрессор. При этом пневмоаккумулятор 9 содержит по меньшей мере три полости 11, разделенные между собой мембранами 12, каждая из которых оснащена клапанами 13 и 14 с электромагнитными катушками «YS1», «YS2». Пневматическая связь ресивера 10 с каждой из полостей 11 пневмоаккумулятора 9 содержит соответствующие распределители 15, 16, 17 с пропорциональным электромагнитным управлением «YA1», «YA2», «YA3» и соответствующие манометры 18, 19, 20 с выходным сигналом соответственно «SP1», «SP2», «SP3». При этом пневмоаккумулятор 9 оснащен по меньшей мере тремя стравливающими клапанами 21 (фиг. 1) с собственными сигналами управления «YK1», «YK2», «YK3» соответственно.
В качестве транспортного средства может использоваться самолет, наземное транспортное средство повышенной проходимости, гидросамолет или другое транспортное средство, оснащенные амортизирующим устройством с аналогичными амортизационными стойками, соответствующими амортизационной стойке 1, с регулируемой жесткостью и демпфированием, сканером, логико-вычислительной подсистемой 4, оснащенной вычислителем 5, эталонной моделью 6 и регулятором 7.
Транспортное средство, реализующее способ снижения динамической нагруженности транспортного средства при движении по поверхности, работает следующим образом.
Как показано на фиг. 1, по меньшей мере в конструкции одной амортизационной стойки 1 шасси 2 (например, передней или задней амортизационных стоек транспортного средства, в качестве которого рассматривается самолет) заложена возможность управления характеристиками по жесткости и демпфированию.
При движении по поверхности транспортное средство, например самолет на этапе разбега и пробега, оборудованное сканером 22 (фиг. 4), сканирует неровности поверхности в направлении движения транспортного средства. Результаты сканирования передаются в вычислитель 5 и эталонную математическую модель 6 амортизационной стойки 1 логико-вычислительной подсистемы 4. В качестве эталонной модели 6 может служить, например, линейное дифференцирующее звено второго или третьего порядка. Затем по уже настроенному алгоритму (фиг. 2) вырабатываются сигналы для исполнительных механизмов, изменяющих характеристики жесткости соответствующей передней и/или задней амортизационной стойки 1 за счет изменения в пневмоаккумуляторе 9 объема, например, полостей 11, образованных между мембранами 12 (фиг. 1), или давления его запитки. Изменение параметров амортизационной стойки 1 шасси 2 происходит также за счет автоматического регулирования диаметра дросселирующего отверстия 8.
Кроме того, измерение текущего значения клиренса транспортного средства и выработка регулятором 7 логико-вычислительной подсистемы 4 сигнала на подачу инертного газа от ресивера 10 обеспечивает поддержание клиренса, соответствующего примерно среднему положению штока, при сохранении запасов прямого и обратного хода (благодаря использованию сигнала датчика перемещения штока амортизационной стойки 1). Это осуществляется за счет подпитки пневмоаккумулятора 9 инертным газом через клапаны 15, 16, 17 из ресивера 10. Оснащение пневмоаккумулятора 9 стравливающими клапанами 21 обеспечивает поддержание необходимого количества инертного газа, достаточного для поддержания транспортного средства при движении по неровностям с заданной величиной его клиренса.
Например, при обнаружении сканером неровностей (фиг. 3), характерных для неподготовленных ВПП по ходу движения транспортного средства, логико-вычислительной подсистемой 4 подается сигнал на открытие установленных на мембранах 12 между полостями 11 клапанов 13 и 14 с электромагнитным управлением посредством электромагнитных катушек соответственно «YS1» и «YS2» (фиг. 1). При этом происходит увеличение объема пневмоаккумулятора 9 соответствующей амортизационной стойки 1, снижение избыточного давления инертного газа в этом объеме и тем самым снижение жесткости амортизационной стойки 1. Действующие на транспортное средство перегрузки при таких параметрах жесткости будут меньше.
В случае если сканер обнаружит по ходу движения транспортного средства поверхность с неровностями, характерными для хорошо подготовленных ВПП, логико-вычислительная подсистема 4 подает сигналы на исполнительные механизмы, обеспечивающие увеличение коэффициентов жесткости соответствующих амортизационных стоек 1. Для увеличения жесткости амортизационной стойки 1 шасси 2 необходимо повысить избыточное давление инертного газа запитки пневмоаккумулятора 9 либо уменьшить объем пневмоаккумулятора 9. Эти процессы выполняются закрытием клапанов 13 и 14 за счет отключения сигналов с катушек «YS1» и «YS2». Подкачка давления в отдельные полости 12 пневмоаккумулятора 9 выполняется за счет распределителей 15, 16, 17 с пропорциональным электромагнитным управлением при включении сигналов «YA1», «YA2», «YA3» (фиг. 1). Эти распределители устанавливают уровень избыточного давления инертного газа и его массовый расход через себя. Уровень давления определяется манометрами 18, 19, 20, передающими сигналы «SP1», «SP2», «SP3» в логико-вычислительную подсистему 4 и эталонную модель 6. Газ к распределителям поступает от ресивера 10 или компрессора.
Управляющие сигналы поступают на исполнительные механизмы от логико-вычислительной подсистемы 4 не напрямую, а после некоторой корректировки полученных на вычислителе 5 и эталонной модели 6 результатов в регуляторе 7. Это происходит следующим образом. В эталонную модель 6 передается информация о движении транспортного средства, результаты реакции эталонной модели 6 сравниваются с реакцией вычислителя 5, после этого вырабатывается сигнал на регулятор 7, и в логико-вычислительной подсистеме 4 корректируются управляющие сигналы на исполнительные органы.
За счет изменения проходной площади отверстия дросселя 8 возможно изменять демпфирующую характеристику амортизационной стойки 1 шасси 2 транспортного средства.
При использовании в качестве транспортного средства самолета (фиг. 4) он оснащается тремя амортизационными стойками, соответствующими амортизационной стойке 1: одной передней и двумя задними основными. На самолете установлены: сканер 22 поверхности, блок с логико-вычислительной подсистемой 4, включающей вычислитель 5, эталонную модель 6 и регулятор 7, на которые приходит информация о типах неровностей опорной поверхности, а также информация с датчиков о параметрах движения транспортного средства, затем эта информация обрабатывается и выдаются сигналы для исполнительных механизмов на изменение характеристик жесткости и демпфирования амортизационных стоек 1 шасси 2.
Способ изменения характеристик по жесткости и демпфированию амортизационной стойки 1 включает алгоритм обработки, вычисления и подачи сигналов на исполнительные механизмы (фиг. 2). На вход вычислителя 5 и эталонной модели 6 логико-вычислительной подсистемы 4 поступают и обрабатываются сигналы о движении транспортного средства, информация со сканера 22 о неровностях впереди расположенной опорной поверхности. Реакции вычислителя 5 и эталонной модели 6 логико-вычислительной подсистемы 4 сравниваются. Корректирующий сигнал для управляющих сигналов на исполнительные механизмы поступает на вход регулятора 7. Затем информация поступает на изменение параметров жесткости и демпфирования амортизационных стоек 1 способом, описанным выше, с подачей электромагнитных сигналов на соответствующие клапаны 15, 16, 17, 13, 14 (на фиг. 2 не показаны). С использованием данного алгоритма (фиг. 2), а также при использовании экспериментальных исследований конкретных транспортных средств можно корректировать алгоритм, изменять коэффициенты усиления управляющих пропорциональных сигналов, а также изменять структуру электронной эталонной модели 6 и логико-вычислительной подсистемы 4 транспортного средства.
Представленная на фиг. 2 алгоритмическая схема работы системы управления характеристиками амортизационных стоек 1 шасси 2 по жесткости рассмотрена на примере выполнения транспортного средства в виде самолета (фиг. 4).
Работа системы управления заключается в следующем. В качестве исходных данных от информационной подсистемы в систему управления поступают коэффициенты жесткости cj и демпфирования kj амортизационных стоек 1, перегрузки ni, различных частей самолета, скорость движения самолета по ВПП vЛА, а также параметры расположенной впереди неровности ВПП ΔhНЕРi, L, сканируемой и распознаваемой сканером. Затем при разбеге самолета по ВПП сравнивается перегрузка в различных частях самолета ni с допускаемой нормированной для данного типа самолета перегрузкой nнорм. Если текущая перегрузка ниже нормированной, то система управления дает команду на дальнейшее повышение скорости. Сравнение перегрузок происходит через интервалы времени Δt. Работа системы управления продолжается до тех пор, пока самолет не наберет взлетную скорость. После отрыва самолета от ВПП система управления параметрами амортизационных стоек 1 шасси 2 отключается.
В случае если текущие перегрузки превышают максимально допустимые, алгоритм работы системы управления происходит по другому сценарию. Начинается сравнение сканируемой неровности ΔhНЕР и некоторой максимально установленной. При этом включается счетчик циклов «m». Если неровность больше максимально установленной, то ВПП (фиг. 3) относится к полосам типа «Б» (элементарно подготовленные) или «В» (неподготовленные). Для такого типа ВПП необходимо снижать коэффициенты жесткости амортизационных стоек 1 за счет увеличения объема пневмоаккумулятора 9, т.е. открывая установленные в мембранах 12 клапаны 13, 14 электромагнитными катушками «YS1» и «YS2» и соединяя полости 11 пневмоаккумулятора 9 между собой. Через промежуток времени Δt опять сравниваются текущие перегрузки с максимально допустимыми. Если текущие перегрузки снова являются более высокими по сравнению с максимально допустимыми, сценарий алгоритма системы управления идет по этой же ветви. В случае появления впереди расположенных сканируемых неровностей ВПП, характерных для полос типа «А» (бетонные ВПП), коэффициенты жесткости, наоборот, повышают, уменьшив объем пневмоаккумулятора 9 и повысив в рабочем объеме избыточное давление инертного газа. Это осуществляется за счет закрытия установленных в мембранах 12 клапанов 13, 14 с электромагнитными катушками «YS1», «YS2», открытия распределителя с пропорциональным электромагнитным управлением, например 15 (сигнал «YA1» на определенный ход золотника, соответствующий заданному избыточному давлению инертного газа) (фиг. 1).
Эта ветвь алгоритма повторяется, в случае необходимости, «z» раз, где «z» - целое число, установленное ответственным исполнителем. В случае если z>m, происходит подача сигнала пилоту о том, что данная ВПП не предполагает взлет самолета без превышения установленного предприятием-изготовителем допустимого уровня вертикальных перегрузок, и пилотом принимается решение на торможение или продолжение взлета самолета. После этого система управления заканчивает свою работу и отключается.
Описанная совокупность признаков представленного способа и транспортного средства обеспечивает повышение качества вырабатываемого сигнала и быстродействия срабатывания амортизационного устройства, что способствует более эффективному снижению перегрузок (за счет откорректированного сигнала управления эталонной моделью) при движении транспортного средства по неровной поверхности.
Представленный уровень раскрытия способа и устройства, реализующего способ, достаточен для разработки в специализированных организациях транспортных средств и его систем, использующих заявленный способ.
Обозначения к описанию группы изобретений
1 - амортизационная стойка;
2 - шасси транспортного средства;
3 - корпус транспортного средства;
4 - логико-вычислительная подсистема;
5 - вычислитель;
6 - эталонная модель;
7 - регулятор;
8 - регулируемый дроссель;
9 - пневмоаккумулятор;
10 - ресивер;
11 - полости пневмоаккумулятора 9;
12 - мембраны пневмоаккумулятора 9;
13 - клапан с электромагнитным управлением YS1;
14 - клапан с электромагнитным управлением YS2;
15 - распределитель с клапаном с пропорциональным электромагнитным управлением YA1;
16 - распределитель с клапаном с пропорциональным электромагнитным управлением YA2;
17 - распределитель с клапаном с пропорциональным электромагнитным управлением YA3;
18 - манометр с выходным электромагнитным сигналом SP1;
19 - манометр с выходным электромагнитным сигналом SP2;
20 - манометр с выходным электромагнитным сигналом SP3;
21 - стравливающий клапан;
22 - сканер;
v=dx/dt - скорость корпуса 3 транспортного средства;
ϑ - угол тангажа корпуса 3 транспортного средства;
dϑ/dt - угловая скорость;
d2yg/dt2 - перегрузка в центре тяжести корпуса 3;
d2yi/dt2 - перегрузки по оси каждой амортизационной стойки;
ΔhНЕР - высота впереди расположенной неровности;
L - длина впереди расположенной неровности;
cj - коэффициент жесткости амортизационных стоек;
kj - коэффициент демпфирования амортизационных стоек;
ni - перегрузки различных частей транспортного средства, например самолета;
vЛА - скорость движения транспортного средства, например самолета;
nНОРМ - допустимая нормированная перегрузка для данного типа движения транспортного средства, например самолета;
Δt - интервалы времени сравнения перегрузок;
m - счетчик циклов;
ВПП - взлетно-посадочная полоса;
неровности типа «А» - бетонные ВПП;
неровности типа «Б» - элементарно подготовленные ВПП;
неровности типа «В» - неподготовленные ВПП;
«YS1» - электромагнитная катушка клапана 13;
«YS2» - электромагнитная катушка клапана 14;
«YA1» - сигнал управления клапаном 15;
«YA2» - сигнал управления клапаном 16;
«YA3» - сигнал управления клапаном 17.
«YK1», «YK2», «YK3» - сигналы управления стравливающими клапанами 21.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНЫХ И УГЛОВЫХ ПЕРЕГРУЗОК ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2014 |
|
RU2569235C1 |
| СПОСОБ СНИЖЕНИЯ ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ, САМОЛЕТ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩИЕ ЭТОТ СПОСОБ | 2011 |
|
RU2483938C1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ВСПОМОГАТЕЛЬНЫХ СИГНАЛОВ НА НАЗЕМНОМ УЧАСТКЕ ДВИЖЕНИЯ САМОЛЕТА | 2019 |
|
RU2733666C1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2527640C1 |
| Способ и устройство управления вращением колес шасси самолета | 2021 |
|
RU2780699C1 |
| Способ формирования вспомогательных управляющих сигналов на пробеге самолета | 2017 |
|
RU2667411C1 |
| Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства | 2024 |
|
RU2828915C1 |
| СИСТЕМА И СПОСОБ ЭКСПЛУАТАЦИИ ДЛЯ РЕГУЛИРОВАНИЯ УРОВНЯ КАБИНЫ ВОДИТЕЛЯ АВТОМОБИЛЯ ПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ ОТНОСИТЕЛЬНО ШАССИ АВТОМОБИЛЯ | 2014 |
|
RU2655793C2 |
| Гусеничное транспортное средство | 1987 |
|
SU1507209A3 |
Группа изобретений относится к области транспорта, а именно к способу снижения динамической нагруженности транспортного средства при движении по неровной поверхности. Транспортное средство содержит амортизационную стойку шасси, логико-вычислительную подсистему, включающую вычислитель, эталонную модель и регулятор, вырабатывающий управляющий сигнал для изменения жесткости и демпфирования амортизационной стойки. По алгоритму анализируется входящая информация об опорной поверхности и о параметрах движения транспортного средства. Логико-вычислительная подсистема выдает электромагнитные пропорциональные сигналы на распределители с пропорциональным электромагнитным управлением и клапаны, установленные на мембранах, разделяющих пневмоаккумулятор на полости. Исполнительные механизмы открывают или закрывают соответствующие пневмолинии и каналы, изменяя объем пневмоаккумулятора, а также варьируя давление его запитки инертным газом. Достигается повышение быстродействия изменения коэффициента жесткости амортизирующего устройства при движении транспортного средства по неровной поверхности при повышении качества вырабатываемого сигнала для амортизирующего устройства. 2 н. и 5 з.п. ф-лы, 4 ил.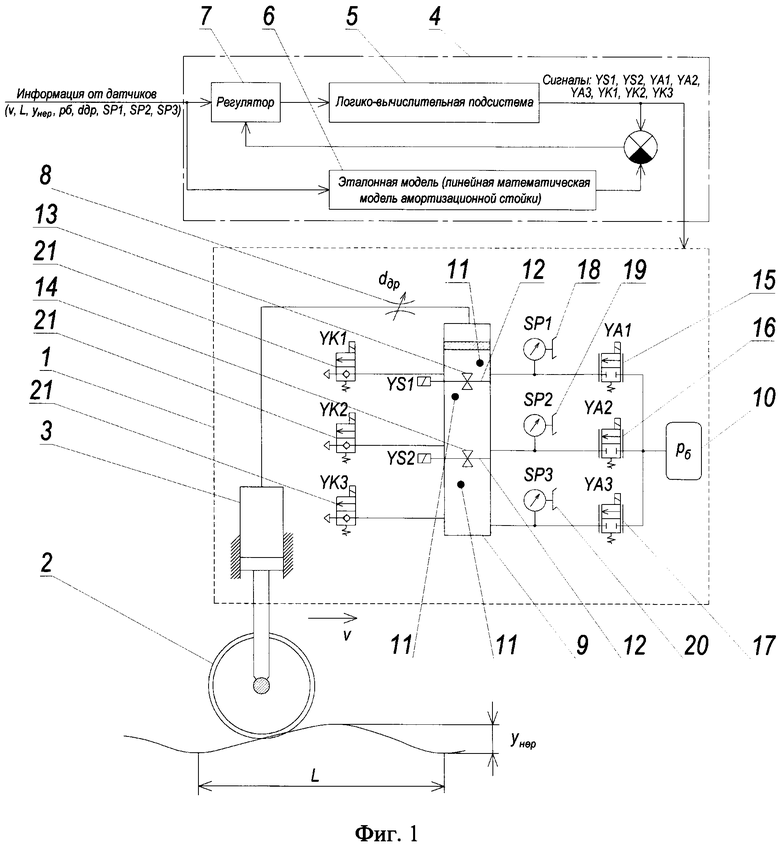
1. Способ снижения динамической нагруженности транспортного средства при движении по поверхности, основанный на регулировании жесткости и демпфирования установленного на транспортном средстве по меньшей мере одного амортизирующего устройства посредством подачи на него управляющего сигнала, вырабатываемого логико-вычислительной подсистемой, оснащенной сканирующим устройством, определяющим параметры неровностей на впереди расположенной опорной поверхности и передающим информацию в логико-вычислительную подсистему, отличающийся тем, что в качестве исходных данных от логико-вычислительной подсистемы в систему управления поступают команды на изменение коэффициентов жесткости и демпфирования амортизационных стоек амортизирующего устройства, перегрузки транспортного средства в различных его частях, скорости движения транспортного средства, по которым в вычислителе логико-вычислительной подсистемы вычисляют перегрузку, сравнивают перегрузку с эталонной моделью логико-вычислительной подсистемы, подают сигналы с вычислителя и эталонной модели на регулятор логико-вычислительной подсистемы, посредством которого выдают команды на изменение характеристик по жесткости и демпфированию по меньшей мере одного амортизирующего устройства, при этом характеристики жесткости и демпфирования изменяют путем регулирования объема пневмоаккумулятора посредством по меньшей мере одного клапана с пропорциональным электромагнитным управлением, расположенного на пневмолиниях между ресивером (компрессором) и пневмоаккумулятором, а также стравливающих клапанов пневмоаккумулятора.
2. Способ снижения динамической нагруженности транспортного средства по п. 1, отличающийся тем, что в качестве исходных данных от логико-вычислительной подсистемы в систему управления поступают коэффициенты жесткости и демпфирования амортизационных стоек амортизирующего устройства, перегрузки с сохранением запасов прямого и обратного хода при использовании сигнала датчика перемещения штока амортизационной стойки.
3. Способ снижения динамической нагруженности транспортного средства по п. 1, отличающийся тем, что при уменьшении величин неровностей поверхности, полученных при сканировании, увеличивают коэффициенты жесткости путем уменьшения объема пневмоаккумулятора и повышения в рабочем объеме пневмоаккумулятора избыточного давления инертного газа соответствующей амортизационной стойки амортизирующего устройства.
4. Способ снижения динамической нагруженности транспортного средства по п. 1, или 2, или 3, отличающийся тем, что при перегрузке ниже максимально допустимой из логико-вычислительной подсистемы в систему управления дается разрешение на возможность увеличения скорости транспортного средства.
5. Транспортное средство, содержащее корпус, амортизирующее устройство, систему управления жесткости и демпфирования амортизирующего устройства, систему управления, логико-вычислительную подсистему, оснащенную блоком памяти, содержащим информацию о реакции эталонной модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения эталонной модели и их первой и второй производных по времени, сканером, блоком сравнения характеристик поверхности с имеющимися в блоке памяти типами неровностей поверхности и реакцией эталонной модели транспортного средства на аналогичные поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства, отличающееся тем, что логико-вычислительная система дополнительно содержит вычислитель и регулятор, а по меньшей мере одно амортизирующее устройство содержит амортизационную стойку с пневмоаккумулятором, выполненным с возможностью изменения его объема и давления запитки, при этом пневмоаккумулятор оснащен мембранами с образованием по меньшей мере трех отсеков, пневматически связанных между собой клапанами с электромагнитным управлением, каждый из отсеков пневматически связан посредством клапанов с пропорциональным электромагнитным управлением с системой подкачки, при этом пневмоаккумулятор амортизационной стойки оснащен по меньшей мере одним стравливающим клапаном.
6. Транспортное средство по п. 5, отличающееся тем, что система подкачки оснащена ресивером или компрессором.
7. Транспортное средство по п. 5, отличающееся тем, что амортизационная стойка содержит дроссель, выполненный с возможностью изменения площади проходного отверстия.
| СПОСОБ СНИЖЕНИЯ ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ, САМОЛЕТ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩИЕ ЭТОТ СПОСОБ | 2011 |
|
RU2483938C1 |
| DE 102008040240 A1, 14.01.2010 | |||
| СПОСОБ ОБРАБОТКИ ДЕТАЛЕЙ | 0 |
|
SU331101A1 |
| СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2395407C2 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |

