Изобретение относится к способам формирования демпферов летательных аппаратов (ЛА).
Известен способ (прототип) [1] формирования демпферов крена, тангажа, рыскания,
заключающийся в том, что в каждом канале управления задают требуемое значение угловой скорости ЛА, измеряют угловую скорость ЛА, формируют сигнал разности заданной и измеренной угловых скоростей, а сигнал усиленной разности подают на рулевой привод,
К достоинству прототипа относится быстродействие демпферов.
Недостатками прототипа являются статические ошибки от возмущающих моментов и вариаций динамических коэффициентов ЛА (параметрических возмущений).
Предлагаемое отличие состоит в том, что дополнительно формируют математическую модель движения ЛА в виде звена первого порядка с приближенно известными динамическими коэффициентами эффективности рулевого органа и демпфирования ЛА, подают на ее вход сигнал отклонения рулевого органа, получаемый на основе выходного сигнала астатического рулевого привода с приведенным единичным коэффициентом передачи, формируют первый дополнительный сигнал на рулевой привод в виде выходного сигнала модели ЛА, усиленного с коэффициентом, обратным коэффициенту передачи модели, обеспечивающим положительную обратную связь и интегрирующее свойство эталонного контура привод-модель, формируют второй дополнительный сигнал на рулевой привод в виде усиленного разностного сигнала отклонения измеряемого сигнала угловой скорости ЛА от соответствующего сигнала модели ЛА со знаком, дающим отрицательную обратную связь по сигналу угловой скорости ЛА в разностном сигнале, и одновременно подают его с противоположным знаком дополнительно на вход модели ЛА для сближения угловых скоростей ЛА и его модели и обеспечения астатизма по отношению к управлению, возмущающим моментам, параметрическим возмущениям, либо дополнительные сигналы на рулевой привод формируют на основе структурных преобразований схемы, получаемой по предлагаемому способу, с использованием модели ЛА или без нее с использованием корректирующих устройств.
Такая последовательность действий над сигналами позволяет обеспечить быстродействие демпфера как у прототипа в отличие от традиционного способа формирования астатического демпфера [2], когда перед статическим демпфером ставится последовательно интегрирующее звено с охватом полученной системы обратной связью, что уменьшает быстродействие и затрудняет обеспечение устойчивости, в частности, из-за ограничения скорости отклонений рулевых органов.
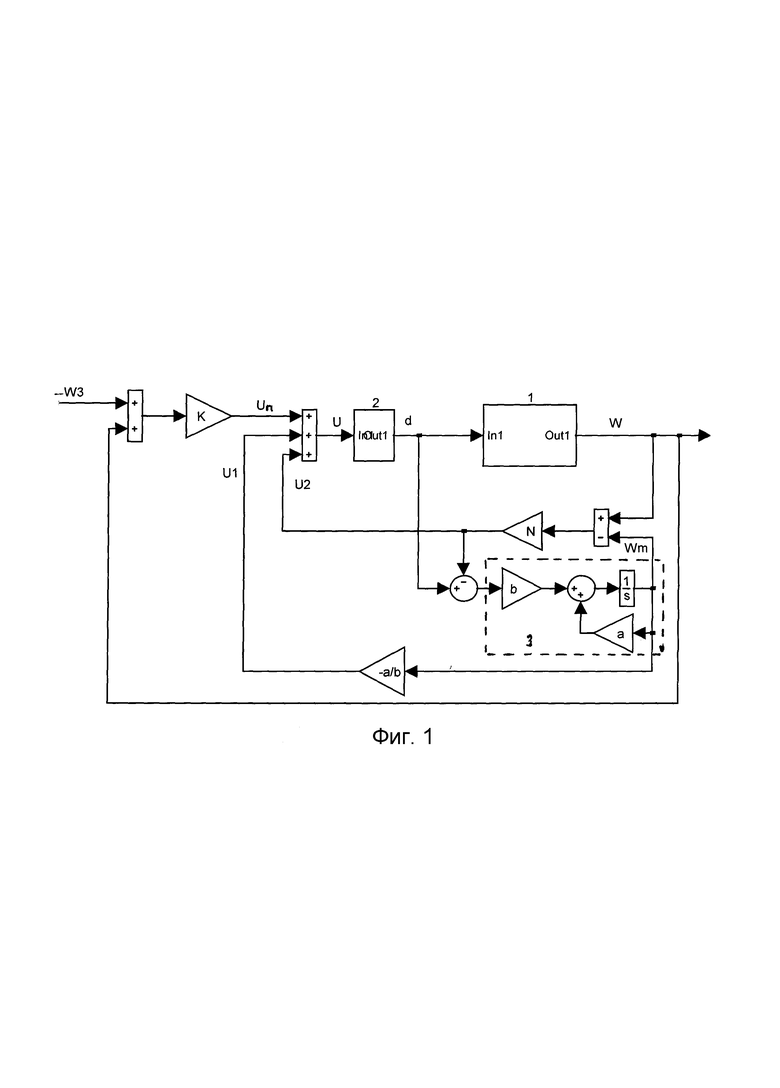
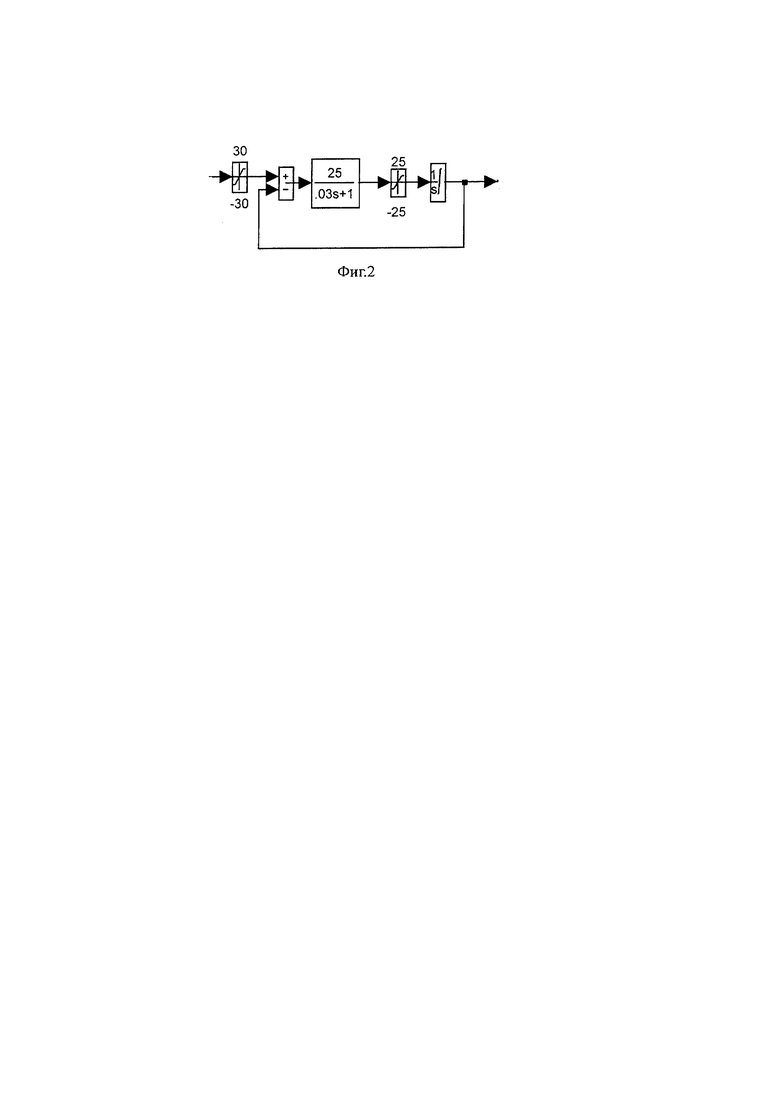
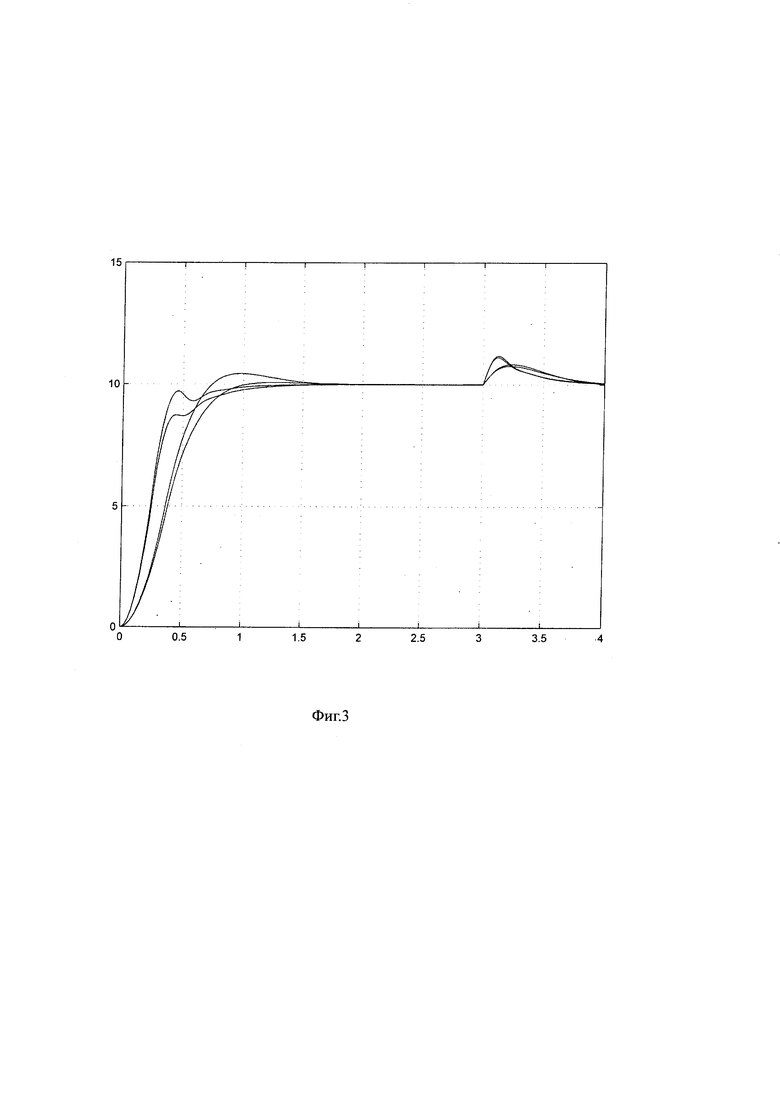
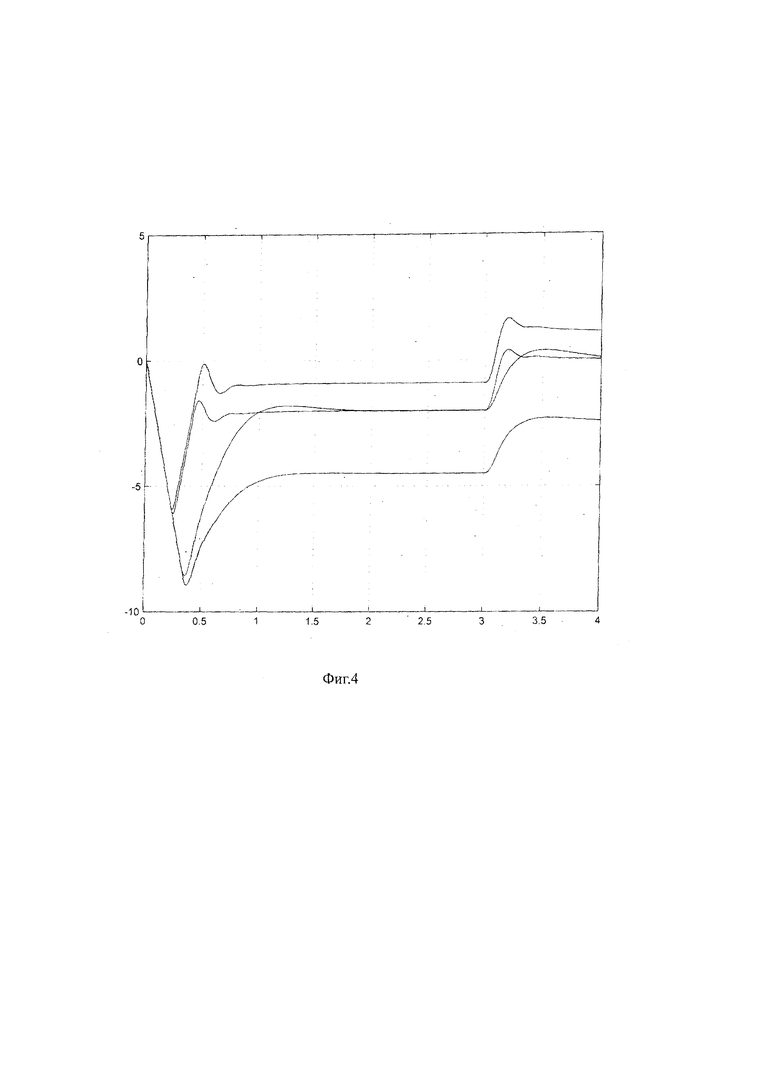
Суть изобретения поясняется фиг. 1, где изображена структурная схема, соответствующая предлагаемому способу формирования какого-либо контура демпфирования ЛА. На фиг. 2 дан пример структурной схемы рулевого привода в схеме фиг. 1, на фиг. 3 представлены переходные процессы отработки ступенчатого заданного сигнала угловой скорости крена с демпфером, сформированным по предложенному способу, при наличии возмущающих моментов и параметрических возмущений. На фиг. 4 показаны процессы отклонения элеронов при работе демпфера крена.
Следует отметить, что структурными преобразованиями схемы реализации способа могут быть весьма разными, в том числе без явной модели ЛА, например, в форме корректирующих устройств в обратных связях рулевого привода и ЛА с одинаковыми знаменателями. Однако, если динамические коэффициенты существенно меняются в зависимости от переменных состояния ЛА, то такие преобразования будут неэквивалентными.
Принятые обозначения:
1. ЛА - летательный аппарат,
2. РП - рулевой привод,
3. МЛА - модель движения ЛА,
ω=w - угловая скорость ЛА;
ωз=wз - заданное значение угловой скорости;
ωм=wm - эталонный сигнал угловой скорости МЛА;
δ=d - угол отклонения рулевого органа (выход РП);
U - суммарный сигнал на входе РП;
Uп - управляющий сигнал РП по прототипу;
U1 - первый дополнительный сигнал РП;
U2 - второй дополнительный сигнал РП;
N - коэффициент усиления разностного сигнала (ω-ωм);
δэ=dэ - угол отклонения элеронов;
К - коэффициент усиления разности (ω-ωз) по прототипу;
(-b)/а - коэффициент передачи МЛА;
Мх возм/Jx - угловое ускорение ЛА от возмущающего момента;
Jx - момент инерции.
Последовательность действий по способу заключается в следующем.
Формируют управляющий сигнал по прототипу
Uп=К(ω-ωз).
Формируют математическую модель движения ЛА (МЛА) в виде звена первого порядка с приближенно известными динамическими коэффициентами эффективности рулевого органа (b) и демпфирования (а) (вычислитель эталонных значений угловой скорости МЛА ωм). Подают на ее вход сигнал рулевого органа как выходной сигнал рулевого привода с приведенным единичным коэффициентом передачи.
Формируют первый дополнительный сигнал на основе выходного сигнала МЛА ωм с коэффициентом усиления, обратным коэффициенту усилении МЛА т.е. с коэффициентом (-а/b), предполагая, что коэффициент усиления астатического привода приведен к единице. В результате
U1=(-a/b)ωм.
Первый дополнительный сигнал дает положительную обратную связь и позволяет обеспечить интегрирующее свойство образующегося эталонного контура привод-модель и разомкнутого контура демпфирования.
Формируют второй дополнительный сигнал рулевого привода, как усиленный разностный сигнал отклонения измеряемого сигнала угловой скорости ЛА от эталонного сигнала МЛА
U2=N(ω-ωм).
В результате суммарный управляющий сигнал рулевого привода равен
U=Uп+U1+U2.
Второй дополнительный сигнал одновременно подают на вход МЛА, т.е. суммируют с сигналом отклонения рулевого органа.
Такое использование второго дополнительного сигнала рулевого привода обеспечивает интегрирующие свойства разомкнутого контура демпфирования и его пониженную чувствительность к неопределенности некоторых параметров ЛА согласно теории модально инвариантных систем [2] и патенту [3].
Коэффициенты усиления разностных сигналов К и N выбирают исходя из требований быстродействия и пониженной чувствительности к параметрическим возмущениям с учетом измерительного шума и инерционности датчика угловой скорости ЛА.
Рассмотрим предлагаемый способ на примере формирования демпфера крена самолета согласно упрощенному линеаризованному уравнению при постоянной скорости полета в следующем виде

где ωх - угловая скорость крена ЛА
δэ=dэ - угол отклонения элеронов,
a, b - динамические коэффициенты (демпфирования крена и эффективности элеронов),
Мх возм/Jx - угловое ускорение самолета, вызванное возмущающим моментом Мх возм и другими моментами, вызванными влиянием других переменных состояния самолета.
Пусть априорные значения динамических коэффициентов равны: а=-1, b=-5, а угловое ускорение Мх возм/Jx=10 град/с2.
Пусть рулевой привод имеет структурную схему, соответствующую фиг. 2.
Формируем модель движения ЛА с помощью уравнения ЛА с динамическими коэффициентами, соответствующими режиму полета.
dωхм/dt=-ωхм-5δэ..
Согласно прототипу и предлагаемому способу управляющий сигнал рулевого привода U равен сумме сигнала прототипа и двум дополнительным сигналам U1 и U2
U=K(ωх-ωз)+U1+U2,
где К - коэффициент усиления сигнала разности угловой скорости ЛА и заданного значения ее.
Формируем первый дополнительный сигнал согласно предлагаемому способу
U1=(-1/5), ωхм,
где коэффициент (-1/5) - обратный коэффициент передачи МЛА.
Формируем второй дополнительный сигнал
U2=N(ωx-ωхм).
где N возьмем равным, например, единице N=1, полагая это значение приемлемым при имеющемся измерительном шуме датчика угловой скорости.
Второй дополнительный сигнал U2 одновременно подаем с противоположным знаком на МЛА. В результате МЛА имеет окончательное уравнение
dωхм/dt=-ωхм-5(δэ-N(ωx-ωхм)).
Значение коэффициента К целесообразно выбирать с учетом возможной неопределенности значений динамических коэффициентов. Полагая, например, что каждый из динамических коэффициентов (эффективности и демпфирования) может независимо изменяться в полтора раза в обе стороны от расчетного (априорного, эталонного) значения, то получится четыре варианта предельных разбросов динамических коэффициентов ЛА. Коэффициент К в рассматриваемом примере, обеспечивающий минимальную длительность наиболее быстрого переходного процесса при перерегулировании не большем 5% примерно равен 1.
На фиг. 3 приведены графики переходных функций (процессов) отработки ступенчатых заданных значений угловой скорости ωз=10 град/с для указанных 4-х вариантов с учетом возмущающего момента на 3-ей секунде. Наиболее быстрый процесс получается при значениях b=-7.5 и а=-0.67. Наиболее медленный - при значениях b=-3.33 и а=-1.5.
Как видим, сформированный по предлагаемому способу демпфер крена является астатическим по отношению к управляющему сигналу, возмущающему моменту на 3-ей секунде и параметрическим возмущениям, а также имеет малый разброс переходных процессов.
На фиг. 4 приведены графики отклонений элеронов, соответствующих процессам фиг. 3, которые свидетельствуют о быстродействии демпфера, близком к оптимальному, так как они отклоняются практически на предельных скоростях отклонений, реализуемых рулевым приводом.
Сравнение процессов, получаемых предложенным способом и традиционным с использованием интеграла в прямой цепи разомкнутого демпфера, показывает, что при заданном значении угловой скорости 10 град/с традиционным способом можно получить примерно такие процессы. Однако, при увеличении заданной угловой скорости до 20 град/с и выше традиционная система теряет устойчивость, а предлагаемая сохраняет приемлемое качество.
Следует отметить возможность реализации изобретения для линейного объекта без явной модели ЛА с помощью корректирующих устройств, получаемых путем структурных преобразований схемы. Так для рассмотренного примера линейного ЛА корректирующее устройство по результирующему сигналу отклонения элеронов должно иметь передаточную функцию вида 6/(s+6) (положительная обратная связь), а корректирующее устройство по угловой скорости должно иметь передаточную функцию вида s/(s+6) (отрицательная обратная связь в разомкнутом контуре).
Литература
1. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. 240 с.
2. Елисеев В.Д, Комаров А.К. Модально-инвариантные системы управления. Уч. пособие. - М.: Изд. МАИ, 1983, 69 с.
3. Елисеев В.Д., Котельникова А.В. Чемоданов В.Б., Похваленский В.Л., Евдокимчик Е.А. Кисин Е.Н. Патент на изобретение №2570127. Способ формирования астатических систем управления объектами с неопределенными параметрами на основе встроенных моделей и модальной инвариантности. Бюль. №34.
Перечень названий фигур
Фиг. 1. Структурная схема предлагаемого демпфера ЛА.
Фиг. 2. Структурная схема рулевого привода (РП).
Фиг. 3. Переходные процессы угловой скорости крена самолета.
Фиг. 4. Процессы отклонения элеронов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| АДАПТИВНЫЙ АВТОПИЛОТ УГЛА КРЕНА | 2004 |
|
RU2272747C2 |
| Автопилот | 1990 |
|
SU1802357A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| Адаптивная система с эталонной моделью для управления летательным аппаратом | 2016 |
|
RU2647405C1 |
| Способ формирования адаптивного сигнала угловой стабилизации по крену летательного аппарата | 2023 |
|
RU2809632C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛОВОЙ СТАБИЛИЗАЦИИ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ОЦЕНКОЙ И КОМПЕНСАЦИЕЙ ВНЕШНЕГО ВОЗМУЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601032C1 |
Изобретение относится к способу формирования астатических быстродействующих демпферов летательных аппаратов (ЛА). Для осуществления способа в каждом канале управления задают требуемое значение угловой скоростей ЛА, измеряют угловую скорость ЛА, формируют сигнал на рулевой привод, полученный путем формирования и обработки двух дополнительных сигналов определенным образом на основе математической модели движения ЛА, заданной и измеренной угловой скорости ЛА. Обеспечивается повышение быстродействия демпферов и устойчивости ЛА. 1 з.п. ф-лы, 4 ил.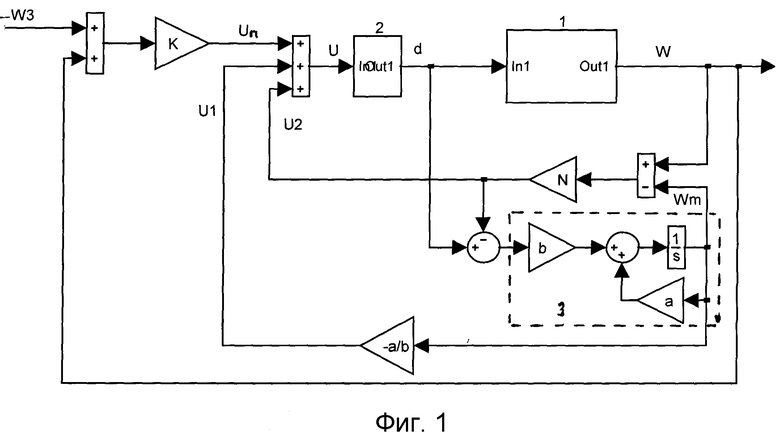
1. Способ формирования астатических быстродействующих демпферов летательных аппаратов (ЛА), заключающийся в том, что в каждом канале управления задают требуемое значение угловой скоростей ЛА, измеряют угловую скорость ЛА, формируют сигнал разности заданной и измеренной угловой скорости, усиленную разность подают на рулевой привод, отличающийся тем, что дополнительно формируют математическую модель движения ЛА в виде звена первого порядка с приближенно известными динамическими коэффициентами эффективности рулевого органа и демпфирования ЛА, подают на ее вход сигнал отклонения рулевого органа, получаемый на основе выходного сигнала астатического рулевого привода с приведенным единичным коэффициентом передачи, формируют первый дополнительный сигнал на рулевой привод в виде выходного сигнала модели ЛА, усиленного с коэффициентом, обратным коэффициенту передачи модели, обеспечивающим положительную обратную связь и интегрирующее свойство эталонного контура привод-модель, формируют второй дополнительный сигнал на рулевой привод в виде усиленного разностного сигнала отклонения измеряемого сигнала угловой скорости ЛА от соответствующего сигнала модели ЛА со знаком, дающим отрицательную обратную связь по сигналу угловой скорости ЛА в разностном сигнале, и одновременно подают его с противоположным знаком дополнительно на вход модели ЛА для сближения угловых скоростей ЛА и его модели и обеспечения астатизма по отношению к управлению, возмущающим моментам, параметрическим возмущениям.
2. Способ формирования астатических быстродействующих демпферов летательных аппаратов (ЛА) по п. 1, отличающийся тем, что дополнительные сигналы на рулевой привод формируют на основе структурных преобразований с использованием модели ЛА или без нее с использованием корректирующих устройств.
| УСТРОЙСТВО ОПТИМИЗАЦИИ АЛГОРИТМОВ АДАПТАЦИИ И СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОПЕРАТОРНЫМ МЕТОДОМ | 2015 |
|
RU2620280C1 |
| Способ защиты поверхности расходуемого электрода от окисления при электрошлаковом переплаве | 1960 |
|
SU142322A1 |
| US 0006859689 B2, 22.02.2005 | |||
| CN 0109541941 A, 29.03.2019 | |||
| Способ формирования адаптивного сигнала управления боковым движением летательного аппарата | 2017 |
|
RU2650307C1 |

