Изобретение относится к способам формирования управления динамическими объектами по директорному прибору, когда человек-оператор отклоняет штурвал управления объектом, стремясь привести метки (стрелки) этого прибора в заданное положение, при котором управляемая координата объекта соответствует заданному значению. В качестве объекта может быть, например, летательный аппарат, когда летчику необходимо с помощью отклонения штурвала управлять траекторией самолета по директорному прибору.
Известен [1] способ (прототип) формирования директорного управления, заключающийся в том, что задают требуемые значения выходных координат объекта, измеряют координаты объекта, формируют сигналы директорного прибора, преобразуют их в отклонения меток (стрелок) директорного прибора, перемещают метки отклонением штурвала (рычага) управления объектом в заданное положение.
К недостатку прототипа относится сложность директорного управления при наличии помех датчиков измерений координат объекта, а также возмущений, действующих на объект, которые приводят к значительным колебаниям и дрожанию меток, крайне неприятным для восприятия полезной составляющей человеком-оператором, что приводит к напряженной работе и неточности управления. Фильтрация этих помех и возмущений традиционными методами приводит к увеличению инерционности внутреннего контура управления, где присутствует человек-оператор, отклоняющий штурвал, что в свою очередь приводит к резкому ухудшению динамики системы и соответственно к неточности управления.
Отличие от прототипа состоит в том, что измеряют отклонения штурвала (или усилия на нем), формируют на основе сигналов этих измерений и модели движения объекта эталонные сигналы, на основе которых формируют сигналы директорного прибора, формируют разностные сигналы отклонений сигналов координат объекта от соответствующих эталонных сигналов модели, на их основе формируют сигналы стабилизации координат объекта относительно соответствующих эталонных сигналов модели и суммируют сигналы стабилизации координат объекта с сигналами управления объектом от штурвала, отклоняемого человеком-оператором, при приведении меток в заданное положение.
Такая последовательность действий над сигналами позволяет исключить попадание помех и возмущенных значений координат объекта на директорный прибор, фактически обеспечивая для человека-оператора эталонное директорное управление виртуальным объектом (его моделью) без помех и возмущений. Стабилизация возмущенных координат объекта относительно эталонного движения виртуального объекта (его модели), задаваемого человеком-оператором, осуществляется автоматически за счет разностных сигналов.
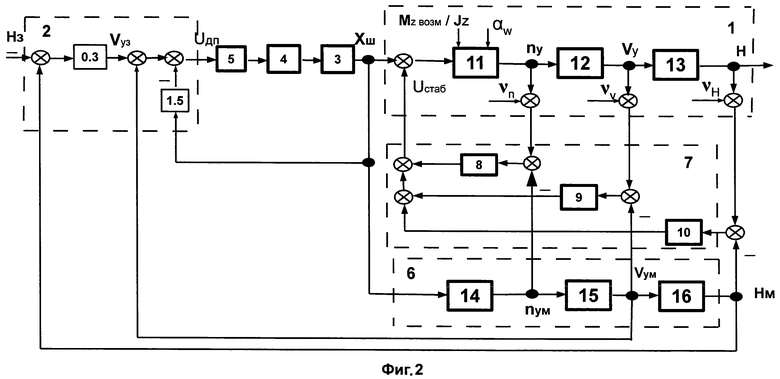
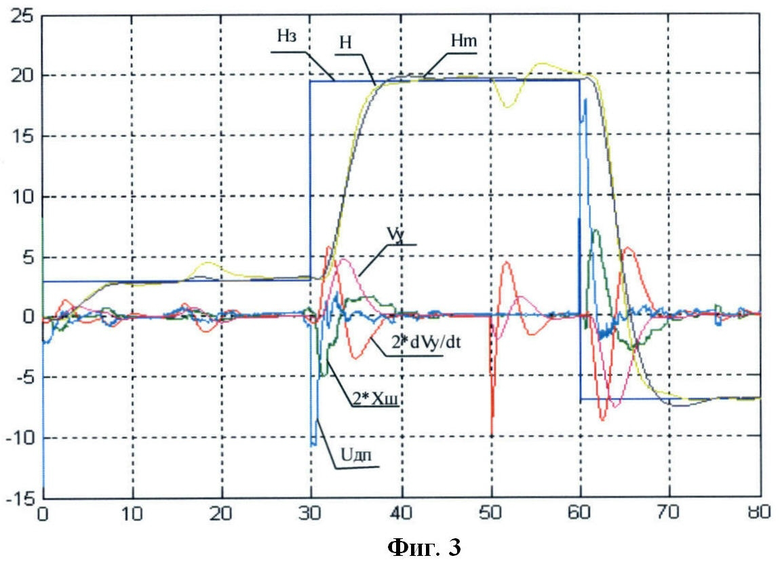
Суть изобретения поясняется фиг.1, где изображена общая схема предлагаемого способа формирования директорного управления; на фиг.2 представлена конкретизированная схема директорного управления высотой полета самолета; на фиг.3 представлены процессы изменения всех координат при стендовом моделировании директорного управления высотой полета самолета.
Принятые обозначения:
1 - объект (объект управления с исполнительными устройствами или подсистемами);
2 - вычислитель сигналов управления;
3 - штурвал;
4 - человек-оператор;
5 - директорный прибор (ДП)
6 - модель движения объекта (виртуальный объект);
7 - блок корректирующих устройств;
8, 9, 10, - первое, второе и третье корректирующие устройства разностных сигналов (nу_nум), (Vу-Vум), (H-Hм) соответственно;
11 - система штурвального управления (СШУ);
12 - передаточная функция объекта от нормальной перегрузки до вертикальной скорости W0(s)=Vу(s)/nу(s)=9.81/s, где s - оператор преобразования Лапласа;
13 - передаточная функция объекта от вертикальной скорости до высоты W1(s)=1/s;
14 - модель системы штурвального управления (МСШУ);
15, 16 - передаточные функции как в блоках 12, 13 соответственно;
Yз - заданные значения выходных координат объекта 1;
Y - координаты объекта 1;
Xш - отклонения штурвала 3;
Xз - заданные значения отклонений штурвала 3;
Uдп - сигналы директорного прибора 4;
Uстаб - сигналы стабилизации объекта 1;
Yм - эталонные сигналы модели движения объекта (виртуального объекта) 6;
f - возмущающие воздействия;
νY - помехи измерений;
H - высота полета самолета;
Hз - заданное значение высоты полета самолета;
Hм=Hm - эталонный сигнал высоты полета;
Vу - вертикальная скорость самолета;
Vум - эталонный сигнал вертикальной скорости;
Vуз - сигнал заданного значения вертикальной скорости;
dVу/dt - вертикальное ускорение;
nу - нормальная перегрузка самолета;
nум - эталонный сигнал нормальной перегрузки;
δ - отклонение рулей высоты;
ωz - угловая скорость самолета;
(α+αw) - угол атаки;
αw - возмущающая ветровая составляющая угла атаки;
Mz воз/Jz - угловое ускорение самолета от возмущающего момента;
νn, νv, νH - помехи в сигналах координат объекта.
Последовательность действий по способу заключается в следующем.
Измеряют отклонения Xш штурвала 3 (или усилия, прикладываемые к нему человеком-оператором 4) [4] и подают сигналы этих отклонений на модель движения объекта 6 (вычислитель эталонных сигналов координат объекта в предположении отсутствия помех и возмущений).
Сигналы координат модели движения объекта 6 (как эталонные сигналы координат объекта) и сигналы отклонений Xш штурвала 3 подают в вычислитель 2 вместе с сигналами заданных значений выходных координат объекта Y3.
В вычислителе 2 сигналы усиливают, суммируют, формируют сигналы директорнго прибора Uдп и подают их на директорный прибор (ДП) 5, где они преобразуются в отклонения меток.
Коэффициенты усиления входных сигналов вычислителя 2 выбирают из требований по качеству процессов управления моделью движения объекта (виртуальным объектом) 6 с учетом инерционности человека-оператора 4.
Указанные устройства совместно с человеком-оператором 4 и штурвалом 3 образуют контур эталонного управления моделью движения объекта 6 [5], в котором отсутствуют помехи, возмущения и инерционности измерителей, что резко облегчает работу человека-оператора 4, позволяет повысить быстродействие и точность директорного управления.
При управлении по директорному прибору отклонения штурвала 3 человеком-оператором 4 создают управление объектом по разомкнутому принципу [5].
Для управления по замкнутому принципу (что необходимо из-за помех и возмущений) формируют разностные сигналы отклонений координат объекта 1 от соответствующих координат модели 6. На основе разностных сигналов с помощью блока корректирующих устройств 7 формируют сигналы стабилизации объекта 1 Uстаб, которые дополнительно подают на объект 1, суммируя с сигналом отклонения штурвала 3, что обеспечивает стабилизацию координат объекта 1 относительно координат модели 6 как эталонных, создаваемых человеком-оператором 4 при удержании меток ДП 5 в заданном положении. Корректирующие устройства блока 7 выбирают исходя из возможности компенсации влияния помех и возмущений с учетом динамики системы стабилизации.
В результате происходит рациональное разделение функций человека-оператора 4 и автоматики: человек-оператор задает командный (эталонный) вектор требуемого текущего состояния объекта, а автоматика отрабатывает эту команду.
Рассмотрим предлагаемый способ на примере директорного управления высотой полета самолета.
Линеаризованные уравнения продольного движения самолета (в отклонениях координат от невозмущеннх значений) с системой штурвального управления (СШУ) при постоянной скорости полета возьмем в следующем виде





где ωz - угловая скорость самолета, (α+αw) - угол атаки, αw - ветровая составляющая угла атаки, δ - отклонение рулей высоты, Vу - вертикальная скорость, H - высота полета, Mz возм/ Jz - угловое ускорение, вызванное возмущающим моментом.
Уравнения (1)-(3) описывают приближенно систему штурвального управления (СШУ) 11 нормальной перегрузкой nу, которая на схеме фиг.2 является подсистемой в системе директорного управления высотой полета H самолета человеком-оператором (летчиком) 4.
Передаточная функция СШУ 11 от сигналов Xш или Uстаб до перегрузки nу согласно уравнениям (1)-(3) имеет вид
WСШУ(s)=-0,8/(s2+8s+8).
Передаточные функции модели СШУ (МСШУ) 14 (от сигналов Xш до nум) и корректирующих устройств 8, 9, 10 соответствующих разностных сигналов (nу-nум), (Vу-Vум), (H-Нм) имеют вид
WМСШУ(s)=-1/(s+10);
WКУ1(s)=(6s+12)/s;
WКУ2(s)=0,6(s+1)/s;
WКУ3(s)=0,18(s+1)/s.
Выходной сигнал вычислителя 2, поступающий на директорный прибор 5 согласно схеме фиг.2, равен
Uдп=0,3(H-Hз)+Vу-1,5 Xш,
или Uдп=1,5(Xз-Xш),
где 1,5Xз=0,3(H-Hз)+Vу.
В данном случае заданное положение метки является нулевым, так как требуется, чтобы отклонение штурвала Хш равнялось заданному значению Хз, когда сигнал Uдп равен нулю.
На фиг.3 представлены переходные процессы стендового моделирования директорного управления высотой полета, где показаны изменения приращений основных координат: Hз, H, Hм=Hm, Vу, dVy/dt, Хш, Uдп при случайных скачкообразных приращениях заданной высоты полета Hз, а также при возникновении возмущающего углового ускорения Mz возм/Jz=8 град/с2 на 15-ой секунде и ветрового воздействия с αw=5 градусов на 50-ой секунде эксперимента.
Как видно, возмущающие воздействия не оказывают влияния на сигнал Uдп и соответственно на поведение меток ДП 5, что облегчает человеку-оператору 4 директорное управление и позволяет получать наиболее быстрые переходные процессы длительностью меньше 10 с.
Аналогично помехи датчиков нормальных перегрузок, вертикальной скорости и высоты также не оказывают влияния на поведение меток ДП 5, так как эти сигналы не используются при формировании вычислителем 2 сигналов ДП 5 Uдп. Эксперименты показывают также, что эти процессы мало зависят от конкретного человека-оператора.
Технический результат от использования изобретения заключается в том, что способ позволяет устранить недостатки прототипа, сохранить его достоинства и существенно повысить быстродействие, точность и легкость управления для человека-оператора, так как устраняется вредное влияние помех и возмущений на качество директорного управления.
Изобретательский уровень предлагаемого способа подтверждается отличительной частью формулы изобретения, а именно добавлением к прототипу модели движения объекта и способом ее подключения, что ранее не было известно.
Литература
1. Михалев И.А., Окоемов Б.Н., Чикулаев М.С.Системы автоматической посадки. - М.: Машиностроение, 1975.
2. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Главная редакция физ.-мат. литературы изд-ва «Наука», 1973.
3. Сильвестров М.М., Бегичев Ю.И., Варочко А.Г., Козиоров Л.М., Луканичев В.Ю., Наумов А.И., Чернышов В.А. Эргатические интегрированные комплексы летательных аппаратов. Под редакцией М.М.Сильвестрова. - М.: Филиал Воениздата, 2007.
4. Елисеев В.Д., Похваленский В.Л., Клюев Е.Д. О способах директорного управления динамическим объектом // Современные технологии в задачах управления, автоматики и обработки информации: Труды XVIII Международного научно-технического семинара. Алушта, сентябрь 2009. - М.: Изд. МГИРЭА, 2009.
5. Елисеев В.Д., Комаров А.К. Модально-инвариантные системы управления. Уч. пособие. - М.: Изд. МАИ, 1983.
Перечень фигур
Фиг.1. Схема директорного управления по эталонным сигналам модели объекта.
Фиг.2. Схема директорного управления высотой полета самолета.
Фиг.3. Переходные процессы стендового моделирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| Способ формирования математической модели человека-оператора при отслеживании заданных положений штурвала по директорному прибору | 2016 |
|
RU2642016C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ НАБОРЕ И СТАБИЛИЗАЦИИ ЗАДАННОЙ ВЫСОТЫ ПОЛЕТА | 2016 |
|
RU2619793C1 |
| СПОСОБ КОНТРОЛЯ ДЕЯТЕЛЬНОСТИ ОПЕРАТОРА НА АВИАЦИОННОМ ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1831958A3 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
Изобретение относится к способам управления траекторией самолета по директорному прибору. Технический результат заключается в повышении быстродействия, точности и простоты управления для человека-оператора за счет устранения помех и возмущений при директорном управлении. В способе измеряют отклонения штурвала, формируют на основе сигналов этих измерений и модели движения объекта эталонные сигналы, на основе которых формируют сигналы директорного прибора, формируют разностные сигналы отклонений сигналов координат объекта от соответствующих эталонных сигналов модели, на их основе формируют сигналы стабилизации координат объекта относительно соответствующих эталонных сигналов модели и суммируют сигналы стабилизации координат объекта с сигналами управления объектом от штурвала, отклоняемого человеком-оператором, при приведении меток в заданное положение. 3 ил.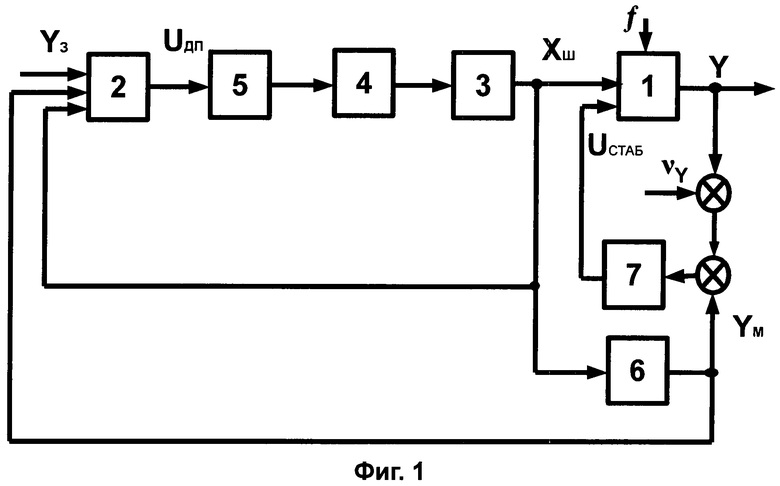
Способ формирования директорного управления по эталонным сигналам модели объекта, заключающийся в том, что задают требуемые значения выходных координат объекта, измеряют координаты объекта, формируют сигналы директорного прибора, преобразуют их в отклонения меток (стрелок) директорного прибора, перемещают метки отклонением штурвала (рычага) управления объектом в заданное положение, отличающийся тем, что измеряют отклонения штурвала (или усилия на нем), формируют на основе сигналов этих измерений и модели движения объекта эталонные сигналы, на основе которых формируют сигналы директорного прибора, формируют разностные сигналы отклонений сигналов координат объекта от соответствующих эталонных сигналов модели, на их основе формируют сигналы стабилизации координат объекта относительно соответствующих эталонных сигналов модели и суммируют сигналы стабилизации координат объекта с сигналами управления объектом от штурвала, отклоняемого человеком-оператором, при приведении меток в заданное положение.
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| Способ поглощения сероводорода из газов | 1938 |
|
SU64351A1 |
| US 3964015 А, 15.06.1976 | |||
| US 6211809 B1, 03.04.2001 | |||
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |

