Изобретение относится к области систем автоматического управления нестационарными объектами, а именно к системам управления беспилотным летательным аппаратом (БЛА).
Известна система управления БЛА, содержащая последовательно соединенные регулятор, исполнительное устройство и беспилотный летательный аппарат, вход которого соединен через первый усилитель с первым входом регулятора, выход беспилотного летательного аппарата через датчик угла рыскания соединен со вторым входом регулятора, а через последовательно соединенные датчик угловой скорости и второй усилитель с третьим входом регулятора [Н.Т. Кузовков. Модальное управление и наблюдающие устройства. - М: Машиностроение, 1976. - С. 15-17 (прототип)].
Недостаток известной системы - низкое качество переходных процессов, отсутствие астатизма и запаса устойчивости при изменении параметров БЛА.
Целью изобретения является повышение запаса устойчивости, обеспечение желаемого качества переходных процессов и астатизма системы при изменении параметров БЛА в широком диапазоне.
Предложенное техническое решение отличается тем, что дополнительно содержит два сумматора, три усилителя, дифференциатор и интегратор, вход системы через первый сумматор подключен к четвертому входу регулятора, а через последовательно соединенные третий усилитель, второй сумматор и интегратор - ко второму входу первого сумматора, выход датчика угловой скорости через четвертый усилитель соединен с третьим входом первого сумматора, через последовательно соединенные дифференциатор и пятый усилитель - с четвертым входом первого сумматора, а выход датчика угла рыскания через шестой усилитель соединен со вторым входом второго сумматора.
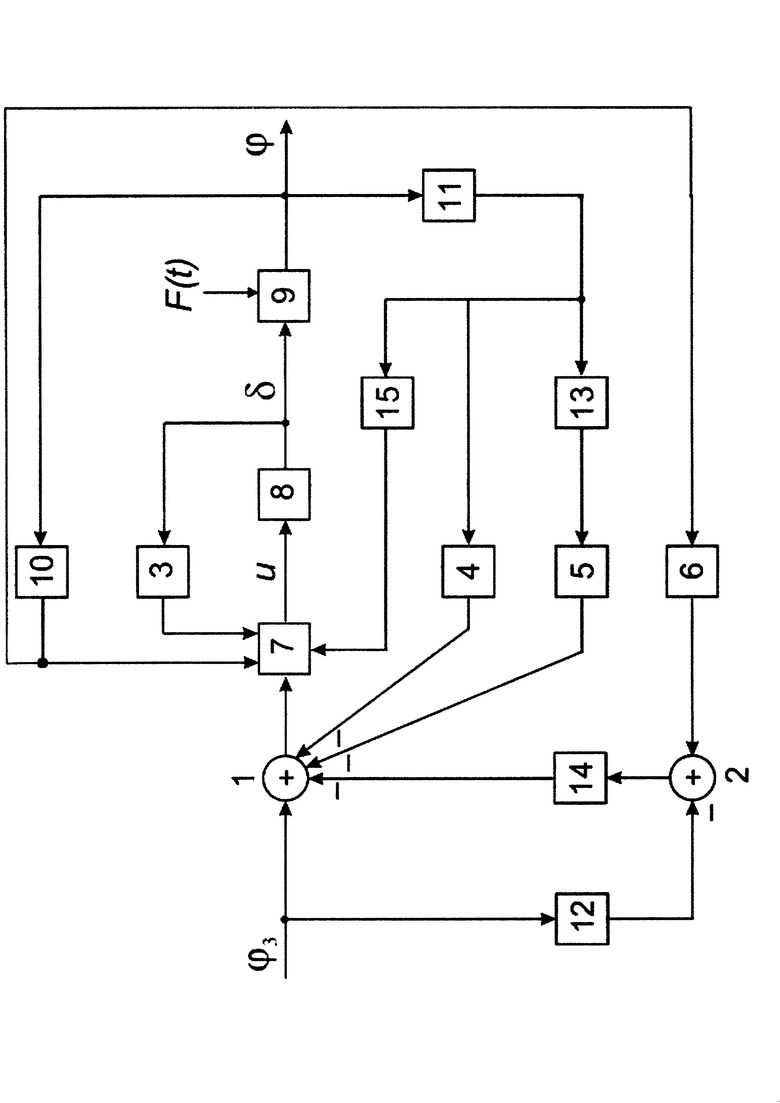
Суть изобретения поясняется чертежом, на котором приняты обозначения:
1, 2 - первый и второй сумматоры соответственно;
3, 4, 5, 6 - первый, четвертый, пятый и шестой усилители соответственно;
7 - регулятор;
8 - исполнительное устройство;
9 - беспилотный летательный аппарат (объект управления);
10 - датчик угла рыскания;
11 - датчик угловой скорости;
12 - третий усилитель;
13 - дифференциатор;
14 - интегратор;
15 - второй усилитель;
u(t) - управление;
δ(t) - отклонение руля;
F(t) - мультипликативная помеха;
Ψ(t), Ψ3(t) - соответственно текущее и заданное значение угла рыскания.
Входом БЛА является руль управления, а выходом - место установки датчика угла рыскания.
Функционирует система управления БЛА 9 следующим образом. Сигнал задания Ψ3(t) поступает через последовательно соединенные первый сумматор 1, регулятор 7 и исполнительное устройство 8 на вход БЛА 9, параметры которого меняются под действием мультипликативной помехи F(t). Выходной сигнал Ψ(t) измеряется датчиком угла рыскания 10, а угловая скорость угла рыскания - датчиком угловой скорости 11. Затем сигналы с выходов датчика угловой скорости 11, датчика угла рыскания 10 и исполнительного устройства 8 (через первый усилитель) в виде отрицательной обратной связи поступают на соответствующие входы регулятора 7. В результате получается структура основного контура управления системы.
Таким образом, БЛА (беспилотник) 9 является нестационарным объектом управления. При изменении параметров БЛА 9 изменяется вид переходных процессов и запасы устойчивости системы управления.
Чтобы обеспечить устойчивость и заданное (желаемое) качество переходных процессов, а также астатизм системы управления БЛА в нее введены дополнительно первый 1 и второй 2 сумматоры, четвертый 4, пятый 5, третий 12 и шестой 6 усилители, а также дифференциатор 13 и интегратор 14. При этом реализуется неявная эталонная модель (на чертеже не указана), и в целом реализуется грубая система управления БЛА 9, которая обеспечивает независимость качества переходных процессов в системе и устойчивости от изменения параметров БЛА 9. Астатические переходные процессы обеспечиваются в грубой системе управления БЛА 9 в основном интегратором 14 (при условии, что коэффициенты усиления третьего 12 и шестого 6 усилителей равны друг другу). Коррекция запаса устойчивости основного контура управления системы обеспечивается сигналами с выходов усилителей 4, 5, а астатизма-с выхода интегратора 14, которые поступают на входы сумматора 1. Структуры БЛА 9 как объекта управления, исполнительного устройства 8 и регулятора 7 определены в [Н.Т. Кузовков. Модальное управление и наблюдающие устройства. - М.: Машиностроение, 1976. - С. 15-17 (прототип)].
Коэффициенты усиления четвертого 4 и пятого 5 усилителей выбираются так, чтобы удовлетворить теореме Харитонова об интервальной устойчивости [Д.П. Ким. Теория автоматического управления. Т. 1. Линейные системы. - М.: Физматлит, 2007. - С. 113-120] на основе знания диапазонов изменения параметров БЛА 9.
Изобретательский уровень предложенного технического решения подтверждается отличительной частью формулы изобретения.
Технический результат от использования изобретения заключается в улучшении качества переходных процессов, обеспечении астатизма системы и повышении ее запаса устойчивости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО УГЛУ КРЕНА | 2018 |
|
RU2691510C1 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| Способ управления пространственной ориентацией космического аппарата и система управления для его реализации | 2016 |
|
RU2618856C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И БЛОК ПОВЫШЕНИЯ АСТАТИЗМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2318234C9 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА СО СТАТИЧЕСКИМ АВТОПИЛОТОМ И С ОГРАНИЧЕНИЕМ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2695474C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2163387C1 |
Система автоматического управления беспилотным летательным аппаратом по углу рыскания содержит регулятор, исполнительное устройство, шесть усилителей, датчик угла рыскания, датчик угловой скорости, два сумматора, дифференциатор, интегратор, соединенные определенным образом. Обеспечивается повышение запаса устойчивости, желаемого качества переходных процессов и астатизма системы. 1 ил.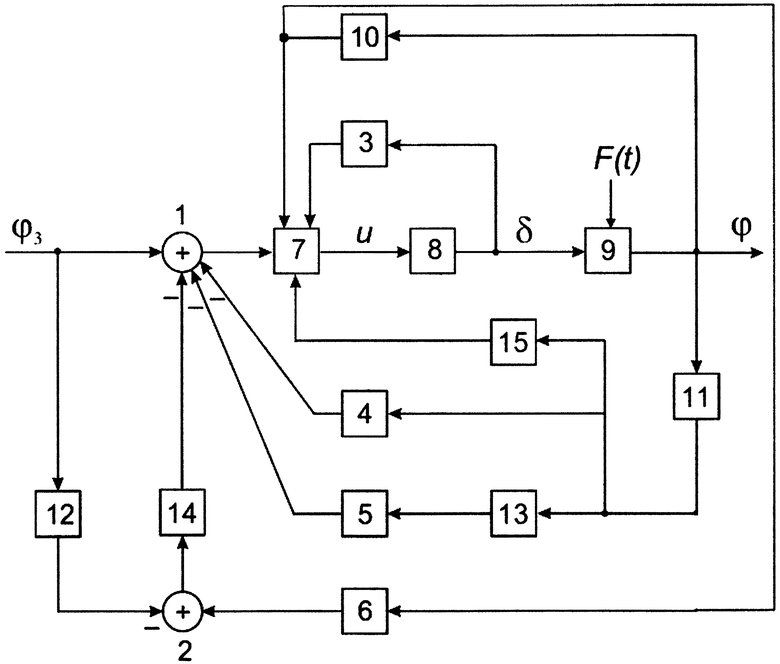
Система автоматического управления беспилотным летательным аппаратом по углу рыскания, содержащая последовательно соединенные регулятор и исполнительное устройство, первый усилитель, соединенный с первым входом регулятора, датчик угла рыскания, соединенный со вторым входом регулятора, а через последовательно соединенные датчик угловой скорости и второй усилитель - с третьим входом регулятора, отличающаяся тем, что она дополнительно содержит два сумматора, три усилителя, дифференциатор и интегратор, вход системы через первый сумматор подключен к четвертому входу регулятора, а через последовательно соединенные третий усилитель, второй сумматор и интегратор - ко второму входу первого сумматора, выход датчика угловой скорости через четвертый усилитель соединен с третьим входом первого сумматора, через последовательно соединенные дифференциатор и пятый усилитель - с четвертым входом первого сумматора, а выход датчика угла рыскания через шестой усилитель соединен со вторым входом второго сумматора.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПО УГЛУ ТАНГАЖА | 2009 |
|
RU2443602C2 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| US 9037315 B2, 19.05.2015 | |||
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| Приспособление для устранения мигания при проектировании фильмы на экране | 1929 |
|
SU19036A1 |
| ИВАЩЕНКО Н.Н | |||
| АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ, М.: МАШИНОСТРОЕНИЕ, 1978, с.29, 30. | |||

